

The Concept and Understanding of Synchronous Stability in Power Electronic-Based Power Systems
Abstract
:1. Introduction
2. Structural Decomposition of Power Electronic-Based Power Systems
2.1. PMSG Single-Machine Infinite-Bus System
2.2. PLL-Based VSC Single-Machine Infinite-Bus System
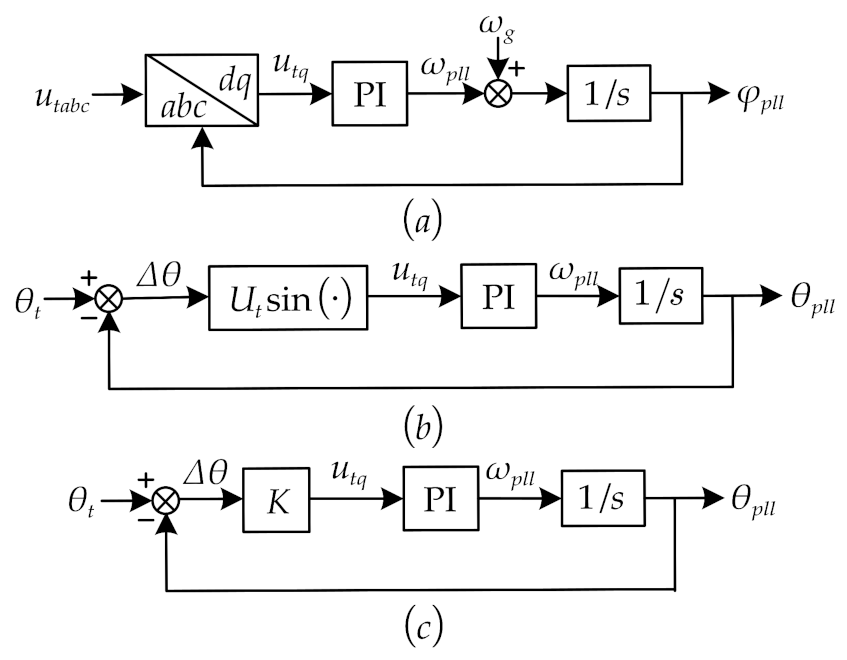
2.3. PLL Controller
2.4. Hierarchical Structure and Their Connections
3. Stability and Response Analyses of PLL Controller
3.1. Small-Signal Stability Analysis
3.2. Dynamic Response Analysis
- 1.
- When the input signal is a phase step, i.e.,where denotes the difference before and after the phase step. The error response in the complex-frequency domain is obtained,and the corresponding error in the time domain isClearly when , the steady-state error vanishes.
- 2.
- When the input signal is a frequency step, i.e.,where denotes the difference before and after the frequency step. Correspondingly, the error response in the complex-frequency domain is obtained,and that in the time domain isClearly when , the steady-state error vanishes again.
- 3.
- When the input signal is a frequency ramp, i.e.,where represents the slope of the change in frequency. Correspondingly, the error response in the complex-frequency domain isand that in the time domain isUnder this situation, when , the steady-state error is finite and equals .
4. Stability Analyses of PLL-Based VSC System
4.1. Steady-State Analysis
4.2. Small-Signal Stability Analysis
4.3. Large-Signal Stability Analysis
5. Simulation Results
5.1. PLL-Based VSC Single-Machine Infinite-Bus System
- Case I: set the fault as the voltage dips 0.2 p.u. at s;
- Case II: set the fault as the voltage dips 0.4 p.u. at s.
5.2. PMSG Single-Machine Infinite-Bus System
- Case I: set the fault as the voltage dips 0.3 p.u. at s;
- Case II: set the fault as the voltage dips 0.74 p.u. at s.
6. Understanding of the Concept of Synchronous Stability
6.1. Relationship between PLL Device Stability and System Stability
6.2. Synchronous Stability in Electromagnetic and Electromechanical timescales
6.3. Dominant Variable for Synchronous Stability
6.4. Relationship between PLL Output Angle and Rotor-Angle of SG
7. Conclusions and Discussion
- 1.
- The PLL device is always stable and the steady-state error between the PLL output angle and the terminal voltage angle is finite. Therefore, the synchronization of power electronic-based power systems should be understood as the output synchronization between the electrical rotation vectors from each grid-tied equipment, rather than the synchronization of the PLL device itself.
- 2.
- The PLL output angle plays an active role in the system synchronization dynamics and can work as a dominant observable in transient processes.
- 1.
- For synchronous stability, it is not the capability of PLL to remain synchronized to the grid, but the capability of PLL-based VSC (or renewable device) to remain synchronized to the grid. The synchronization stability is a system-level problem. Thus, the phrases for the PLL synchronization stability (or loss of synchronization) scattered in the literature should be more properly expressed and understood as the PLL-based VSC (or PLL-based renewable device) synchronization stability. It should be pointed out that the relation between and has never been seriously studied in all previous studies, to the best knowledge of the authors. In this paper, the dynamic response of is theoretically analyzed by linearization under three typical disturbances of . Due to the non-linearity of PLL and diversity of faults, the dynamic response analysis under large disturbances relies on numerical simulations mostly.
- 2.
- It is found that the PLL output angle can show not only electromagnetic but also electromechanical dynamics by broad simulations. Hence, it is expected that the usual concept of synchronous stability should be extended to larger systems.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| The phase-locked loop (PLL) output angle in the three-phase stationary | |
| reference frame | |
| The PLL output angle in the common reference frame | |
| The terminal voltage angle | |
| The internal potential angle | |
| The controlled current source output angle | |
| The common reference frame frequency and the PLL output frequency | |
| The line and filter inductances | |
| The terminal voltage and infinite-bus voltage | |
| The terminal voltage in the d and q coordinate | |
| The grid-side converter (GSC) output currents in the d and q coordinate | |
| The GSC output current references in the d and q coordinate | |
| The difference between the terminal voltage angle and the PLL output angle | |
| The proportional and integral (PI) parameters of PLL |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Symbol | Variable | Numerical Value |
|---|---|---|---|
| Rated Parameter | Rated Capacity | 2 MVA | |
| Nominal Voltage | 690 V | ||
| Rated Frequency | 50 Hz | ||
| Circuit Parameter | Filter Inductance | 0.1 p.u. | |
| Line Inductance | 0.5 p.u. | ||
| C | Capacitor | 0.1 p.u. | |
| Controller Parameter | / | PI Parameters of the DVC | 3.5/140 |
| / | PI Parameters of the TVC | 1/100 | |
| / | PI Parameters of the ACC | 0.3/160 | |
| / | PI Parameters of the PLL | 50/2000 |
| Category | Symbol | Variable | Numerical Value |
|---|---|---|---|
| Rated Parameter | Rated Capacity | 2 MVA | |
| Nominal Voltage | 690 V | ||
| Rated Frequency | 50 Hz | ||
| Circuit Parameter | Filter Inductance | 0.1 p.u. | |
| Line Inductance | 0.3 p.u. | ||
| C | Capacitor | 0.1 p.u. | |
| Stator Inductance | 0.4 p.u. | ||
| Controller Parameter of GSC | / | PI Parameters of the DVC | 3.5/140 |
| / | PI Parameters of the TVC | 1/100 | |
| / | PI Parameters of the ACC | 0.3/160 | |
| / | PI Parameters of the PLL | 50/2000 | |
| Controller Parameter of MSC | / | PI Parameters of the RSC | 3/20 |
| / | PI Parameters of the ACC | 0.3/160 | |
| / | Parameters of the AIC | 20/1 |
References
- Hatziargyriou, N.D.; Milanovic, J.V.; Rahmann, C.; Ajjarapu, V.; Vournas, C. Stability Definitions and Characterization of Dynamic Behavior in Systems with High Penetration of Power Electronic Interfaced Technologies. IEEE PES Technical Report PES-TR77. 2020. Available online: https://resourcecenter.ieee-pes.org/publications/technical-reports/PES_TP_TR77_PSDP_STABILITY_051320.html (accessed on 20 December 2022).
- Wang, X.; Blaabjerg, F. Harmonic Stability in Power Electronic-Based Power Systems: Concept, Modeling, and Analysis. IEEE Trans. Smart Grid 2019, 10, 2858–2870. [Google Scholar] [CrossRef] [Green Version]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw Hill: New York, NY, USA, 1994; pp. 14–20. [Google Scholar]
- Taul, M.G.; Wang, X.; Davari, P.; Blaabjerg, F. An Overview of Assessment Methods for Synchronization Stability of Grid-Connected Converters Under Severe Symmetrical Grid Faults. IEEE Trans. Power Electron. 2019, 34, 9655–9670. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Cai, X.; Zhang, C.; Lv, J.; Li, Y. Transient Synchronization Stability Analysis of Voltage Source Converters: A Review. In Proceedings of the CSEE, Dalian, China, 5–8 July 2021; Volume 41, pp. 1687–1702. (In Chinese). [Google Scholar] [CrossRef]
- Göksu, Ö.; Teodorescu, R.; Bak, C.L.; Iov, F.; Kjær, P.C. Instability of Wind Turbine Converters During Current Injection to Low Voltage Grid Faults and PLL Frequency Based Stability Solution. IEEE Trans. Power Syst. 2014, 29, 1683–1691. [Google Scholar] [CrossRef]
- Ma, S.; Geng, H.; Liu, L.; Yang, G.; Pal, B.C. Grid-Synchronization Stability Improvement of Large Scale Wind Farm during Severe Grid Fault. IEEE Trans. Power Syst. 2018, 33, 216–226. [Google Scholar] [CrossRef] [Green Version]
- Dong, D.; Wen, B.; Boroyevich, D.; Mattavelli, P.; Xue, Y. Analysis of Phase-Locked Loop Low-Frequency Stability in Three-Phase Grid-Connected Power Converters Considering Impedance Interactions. IEEE Trans. Ind. Electron. 2015, 62, 310–321. [Google Scholar] [CrossRef]
- Hu, Q.; Fu, L.; Ma, F.; Ji, F. Large Signal Synchronizing Instability of PLL-Based VSC Connected to Weak AC Grid. IEEE Trans. Power Syst. 2019, 34, 3220–3229. [Google Scholar] [CrossRef]
- Ma, R.; Li, J.; Kurths, J.; Cheng, S.; Zhan, M. Generalized Swing Equation and Transient Synchronous Stability With PLL-Based VSC. IEEE Trans. Energy Convers. 2022, 37, 1428–1441. [Google Scholar] [CrossRef]
- Zhao, J.; Huang, M.; Yan, H.; Tse, C.K.; Zha, X. Nonlinear and Transient Stability Analysis of Phase-Locked Loops in Grid-Connected Converters. IEEE Trans. Power Electron. 2021, 36, 1018–1029. [Google Scholar] [CrossRef]
- Zarif Mansour, M.; Me, S.P.; Hadavi, S.; Badrzadeh, B.; Karimi, A.; Bahrani, B. Nonlinear Transient Stability Analysis of Phased-Locked Loop-Based Grid-Following Voltage-Source Converters Using Lyapunov’s Direct Method. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2699–2709. [Google Scholar] [CrossRef]
- Wu, H.; Wang, X. Design-Oriented Transient Stability Analysis of PLL-Synchronized Voltage-Source Converters. IEEE Trans. Power Electron. 2020, 35, 3573–3589. [Google Scholar] [CrossRef] [Green Version]
- Shen, C.; Shuai, Z.; Shen, Y.; Peng, Y.; Liu, X.; Li, Z.; Shen, Z.J. Transient Stability and Current Injection Design of Paralleled Current-Controlled VSCs and Virtual Synchronous Generators. IEEE Trans. Smart Grid 2021, 12, 1118–1134. [Google Scholar] [CrossRef]
- He, X.; Geng, H.; Li, R.; Pal, B.C. Transient Stability Analysis and Enhancement of Renewable Energy Conversion System During LVRT. IEEE Trans. Sustain. Energy 2020, 11, 1612–1623. [Google Scholar] [CrossRef]
- Yang, Z.; Ma, R.; Cheng, S.; Zhan, M. Nonlinear Modeling and Analysis of Grid-Connected Voltage-Source Converters Under Voltage Dips. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3281–3292. [Google Scholar] [CrossRef]
- Xing, G.; Min, Y.; Tang, Y.; Xu, S.; Wang, J.; Zheng, H. Large Disturbance Instability Mode of Grid-Connected Converters. Electr. Power Autom. Equip. 2022, 42, 47–54. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, J.; Kurths, J.; Zhan, M. Nonlinear Modeling of Multi-Converter Systems Within DC-Link Timescale. IEEE J. Emerg. Sel. Top. Circuits Syst. 2021, 11, 5–16. [Google Scholar] [CrossRef]
- Afifi, M.A.; Marei, M.I.; Mohamad, A.M.I. Modelling, Analysis and Performance of a Low Inertia AC-DC Microgrid. Appl. Sci. 2023, 13, 3197. [Google Scholar] [CrossRef]
- Shadoul, M.; Ahshan, R.; AlAbri, R.S.; Al-Badi, A.; Albadi, M.; Jamil, M. A Comprehensive Review on a Virtual-Synchronous Generator: Topologies, Control Orders and Techniques, Energy Storages, and Applications. Energies 2022, 15, 8406. [Google Scholar] [CrossRef]
- Pal, D.; Panigrahi, B.K. Reduced-Order Modeling and Transient Synchronization Stability Analysis of Multiple Heterogeneous Grid-Tied Inverters. IEEE Trans. Power Deliv. 2022, 1–12. [Google Scholar] [CrossRef]
- Buragohain, U.; Senroy, N. Reduced Order DFIG Models for PLL-Based Grid Synchronization Stability Assessment. IEEE Trans. Power Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Sun, H.; Xu, S.; Xu, T.; Bi, J.; Zhao, B.; Guo, Q.; He, J.; Song, R. Research on Definition and Classification of Power System Security and Stability. Proc. CSEE 2022, 42, 7796–7809. (In Chinese) [Google Scholar] [CrossRef]
- Gu, Y.; Green, T.C. Power System Stability With a High Penetration of Inverter-Based Resources. Proc. IEEE 2022, 1–22. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhan, M. Dominant Transient Unstable Characteristics of PLL-Based Grid-Connected Converters. Proc. CSEE 2023. early access (In Chinese) [Google Scholar]
- Gardner, F.M. Phaselock Techniques; John Wiley: Hoboken, NJ, USA, 1979; pp. 15–60. [Google Scholar]
- Zhang, J.; Zheng, J. Phaselock Techniques; Xi’an Electronic Science and Technology University: Xi’an, China, 2012; pp. 19–30. [Google Scholar]
- Fu, X.; Sun, J.; Huang, M.; Tian, Z.; Yan, H.; Iu, H.H.C.; Hu, P.; Zha, X. Large-Signal Stability of Grid-Forming and Grid-Following Controls in Voltage Source Converter: A Comparative Study. IEEE Trans. Power Electron. 2021, 36, 7832–7840. [Google Scholar] [CrossRef]
- Tang, W.; Zhou, B.; Hu, J.; Guo, Z.; Zhang, R. Transient Synchronous Stability of PLL-based Wind Power-synchronous Generation Interconnected Power System in Rotor Speed Control Timescale. Proc. CSEE 2021, 41, 6900–6916. (In Chinese) [Google Scholar] [CrossRef]
- Yuan, H.; Yuan, X.; Hu, J. Modeling of Grid-Connected VSCs for Power System Small-Signal Stability Analysis in DC-Link Voltage Control Timescale. IEEE Trans. Power Syst. 2017, 32, 3981–3991. [Google Scholar] [CrossRef]







| Phase Step | Frequency Step | Frequency Ramp | |
|---|---|---|---|
| 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Han, M.; Zhan, M. The Concept and Understanding of Synchronous Stability in Power Electronic-Based Power Systems. Energies 2023, 16, 2923. https://doi.org/10.3390/en16062923
Zhang Y, Han M, Zhan M. The Concept and Understanding of Synchronous Stability in Power Electronic-Based Power Systems. Energies. 2023; 16(6):2923. https://doi.org/10.3390/en16062923
Chicago/Turabian StyleZhang, Yayao, Miao Han, and Meng Zhan. 2023. "The Concept and Understanding of Synchronous Stability in Power Electronic-Based Power Systems" Energies 16, no. 6: 2923. https://doi.org/10.3390/en16062923