1. Introduction
As an uncertain reasoning method, evidence theory [
1,
2] needs weaker conditions than Bayesian probability theory, but it possesses the ability to express “uncertainty” and “ignorance” directly. The primary data required in evidence theory are more intuitive and easy to obtain than in probability reasoning theory. One can quickly integrate the knowledge and data from different experts or data sources to describe the uncertainty flexibly. It has been widely used in supplier selection [
3,
4], target recognition [
5,
6], decision making [
7,
8], reliability analysis [
9,
10,
11,
12,
13], optimization in uncertain environments [
14,
15,
16], etc. However, in the application of DS evidence theory, evidence fusion plays a crucial role due to the unreliability of the evidence source. The Dempster fusion rule was established based on the multiplication principle. In cases where there is conflicting evidence in evidence theory, the Dempster combination rule is used to explain counterintuitive outcomes, which can lead to what is known as the “Zadeh paradox”.
To address the issue of conflicting evidence fusion, scholars have presented many outstanding studies. When there are conflicts in original evidence, traditional DS theory cannot be applied and it needs to be improved. In recent years, a large number of scholars and experts have improved evidence theory from two aspects. The first is to improve the fusion rules of DS evidence theory. Sun promoted the concept of credibility, believing that the credibility of all evidence is equal, and modified the Dempster rule by weighted summation [
17]. Yang established a unique evidential reasoning (ER) rule, combining multiple pieces of independent evidence with weight and reliability, improving and enhancing the Dempster rule by determining how to combine completely reliable evidence and analyzing significant or complete conflicts through new reliability disturbances [
18]. Deng Yong proposed a new concept called generalized evidence theory (GET), and defined a new concept called generalized basic probability assignment (GBPA). They established a model to deal with uncertain information, provided generalized combination rules (GCR) for the combination of GBPA, and constructed a generalized conflict model to measure the conflict between evidence [
19]. The second aspect is to modify the original evidence. Smets proposed pignistic probability transformations and adopted an average distribution strategy in order for the mass function of assignments to meet the conditions [
20]. Based on a geometric interpretation of this evidence theory, Jousselme defined the Jousselme evidence distance to describe the differences in evidence through distance information [
21]. Murphy believed that the evidence should be a weighted average, which would better deal with the normalization problem [
22]. Tang proposed a new multi-sensor data fusion method based on weighted confidence entropy, which measures the uncertainty of evidence through mass functions and an identification framework to reduce the loss of evidence information [
23].
In this field, domestic and foreign scholars and experts have achieved excellent results in a particular range. However, in the application of single target recognition, there is only a single result, i.e., . Multi-subset BPAs such as , which means there is still uncertainty in the outcome of the fusion, reduce the probability of target recognition. At present, there has been no relevant research conducted on the matter. In this article, a method for recognizing single targets through conflicting evidence fusion is proposed. This method involves consolidating multiple subsets within the framework of evidence theory into a single subset, while incorporating the evidence distance, evidence angle, and entropy to enhance the accuracy of target fusion. First, the pignistic probability function is improved to transform each original evidence into a single propositional subset to avoid a single recognition result including multiple subset propositions in the process of the Dempster rule. Then, the combination of the Manhattan distance and evidence angle measurements is proposed to extract the degree of evidence certainty and obtain the mutual support information between all data. Furthermore, entropy is introduced to calculate the uncertainty of evidence. The initial evidence is fused according to the coefficient of uncertainty and is transformed to updated evidence. Finally, the Dempster combination rule is used to fuse the updated evidence.
2. Materials and Methods
2.1. Dempster Rule
Let U be a domain set representing all values of X, and all elements in U are not integrated. Then, U is called the recognition framework of X.
The research objects in scientific theory compose a nonempty set, which is called a domain.
Definition 1.
Let U be a recognition framework, then the function satisfies the following conditions:
- (1)
;
- (2)
.
Then, is the basic probability assignment (BPA) of A, is the mass function, and represents the degree of trust in A. If , A is called a focal element.
Hypothesis
and
are the two basic probability assignments on the same recognition framework
U, and the focal elements are
and
. Namely,
Then,
where
;
; and
K is the conflict factor, which reflects the degree of conflict between evidence.
is called the normalization factor. The Dempster rule allocates the conflict to each set in equal proportion.
Define the system identification framework as , N evidence as , and the mass functions corresponding to each evidence as .
2.2. Improved Pignistic Probability Function
In single target recognition, the fusion recognition result often only has a certain target. In the framework of DS evidence theory, when evidence contains multiple subset propositions, the fusion result also contains multiple subset propositions, which increases the computational complexity. This work improves the pignistic probability function to transform the multiple subset propositions into single subset propositions, in which the BPA of multiple subset propositions is distributed according to the weight of single subset propositions. The weight is allocated according to the information of each single subset proposition provided by the evidence itself, which reduces the computational complexity and information lost in the process of transforming the pignistic probability function [
24] from the BPA to the single subset BPA. The improved pignistic probability conversion function is as follows:
where
A is the proposition of original evidence and
B is a simple subset proposition in
,
refers to the multi sub proposition in evidence,
, ∅ is an empty set,
, and
represents the number of elements contained in proposition
A.
After the pignistic probability function is conserved, the BPA is converted into a single subset BPA
.
2.3. Evidence Support Based on the Manhattan Distance
The distance between evidence [
25] can effectively measure the degree of support between evidence. At present, domestic and foreign scholars have proposed a variety of methods to measure distance, including the Lance distance, the Jousselme distance, and the Mahalanobis distance. However, the Lance distance does not take into account the correlation between indicators. The Jousselme distance is affected by the dispersion of the basic probability distribution of evidence [
26]. The Mahalanobis distance function requires calculation of the covariance of the matrix, which is hugely complex. The Manhattan distance introduced in this paper calculates the distance of each single subset BPA identification result to measure the similarity between the evidence. This method has low computational complexity.
The Manhattan distance between two pieces of evidence is calculated as:
where
. The Manhattan distance between each evidence is calculated to obtain the distance matrix D:
The distance between evidence is negatively correlated with the support.
The calculation of the evidence support of
is:
The support degree is obtained based on the Manhattan distance between evidence. The support is normalized to obtain the support coefficient of the evidence
.
2.4. Evidence Similarity Based on Evidence Angle
The angle between the two pieces of evidence can be used to structure the consistency between the evidence subjects, and the results obtained can be used to measure the similarity between the two evidence subjects. The formula for the evidence angle [
27] is as follows:
The larger value of
, the more consistent two pieces of evidence are. It shows that there is a higher similarity between the two pieces of evidence. The evidence angle between each evidence is calculated from the angle matrix, Ang. The similarity between evidence is calculated from the angle matrix:
The similarity between evidence is measured based on the evidence angle. The similarity is normalized to obtain the similarity coefficient of the evidence
.
2.5. Evidence Uncertainty Based on Entropy
In evidence theory, the amount of information content that evidence carries can be measured by information entropy. The higher the information entropy, the more information the evidence carries, and the lower the probability of occurrence in the real world, the higher the uncertainty. The calculation formula for information entropy is as follows:
The uncertainty coefficient of each piece of evidence
is calculated by:
where
.
2.6. Evidence Fusion Based on the Dempster Rule
The evidence fusion coefficient integrating the Manhattan distance, the evidence angle, and the reliability entropy is:
The fusion coefficient
is normalized to obtain the final evidence fusion coefficient
. The single subset BPA
is modified:
where
;
All the initial evidence is replaced with
, and finally the modified evidence is fused with the Dempster rules:
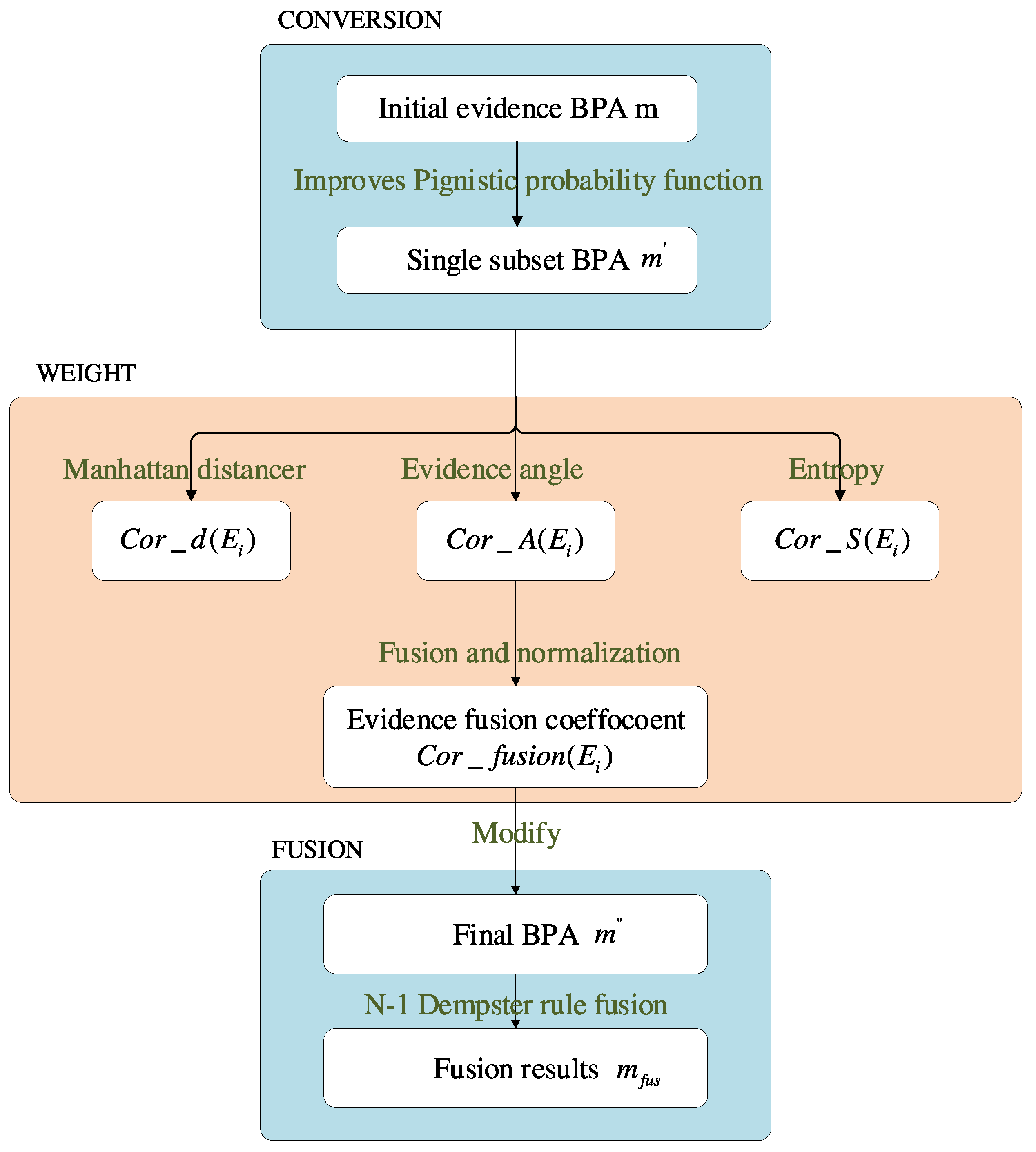
The flow graph of the method proposed in this paper is shown in
Figure 1.
4. Discussion
As shown in the figure above, applying the Dempster fusion rule leads to counter-intuitive results.
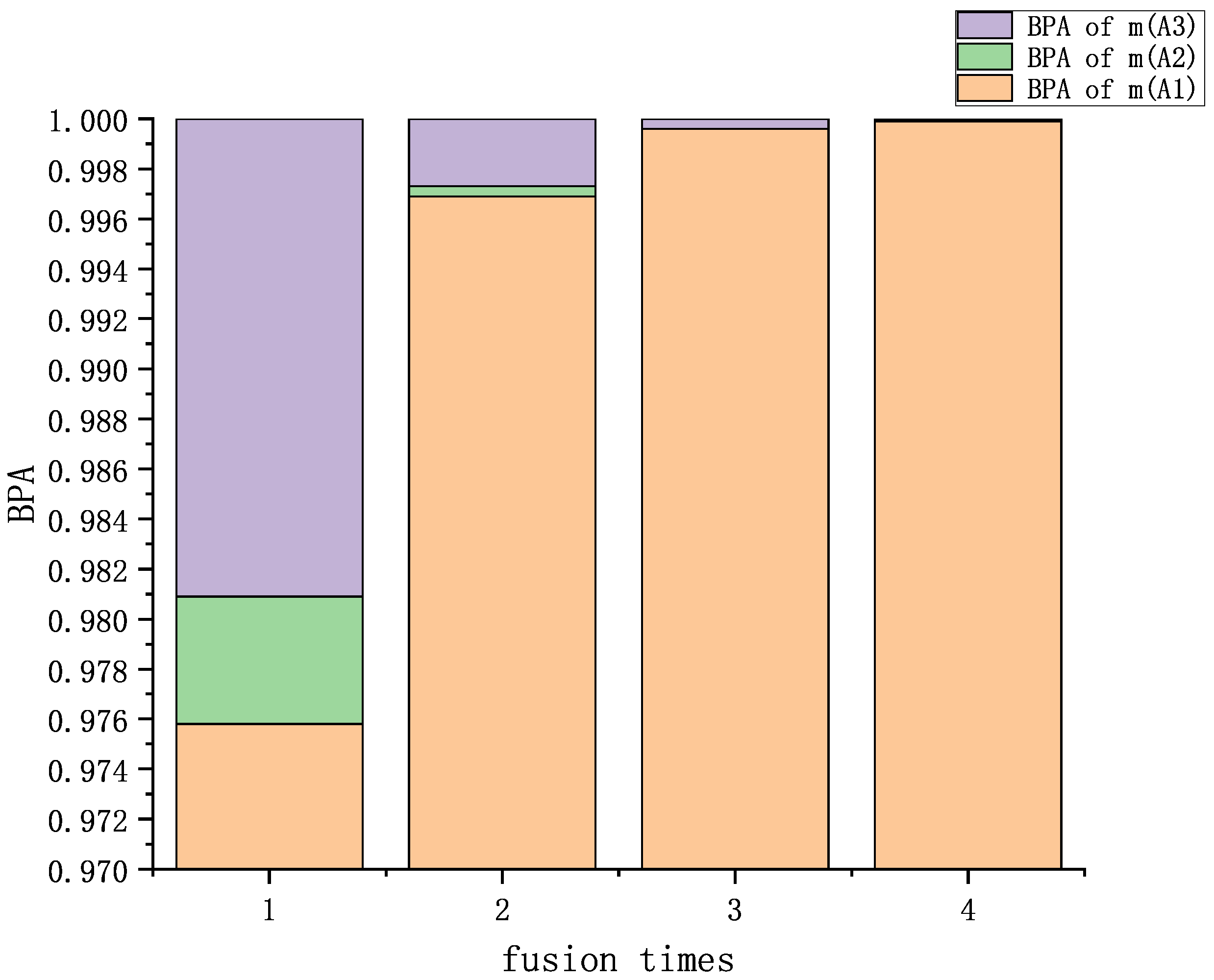
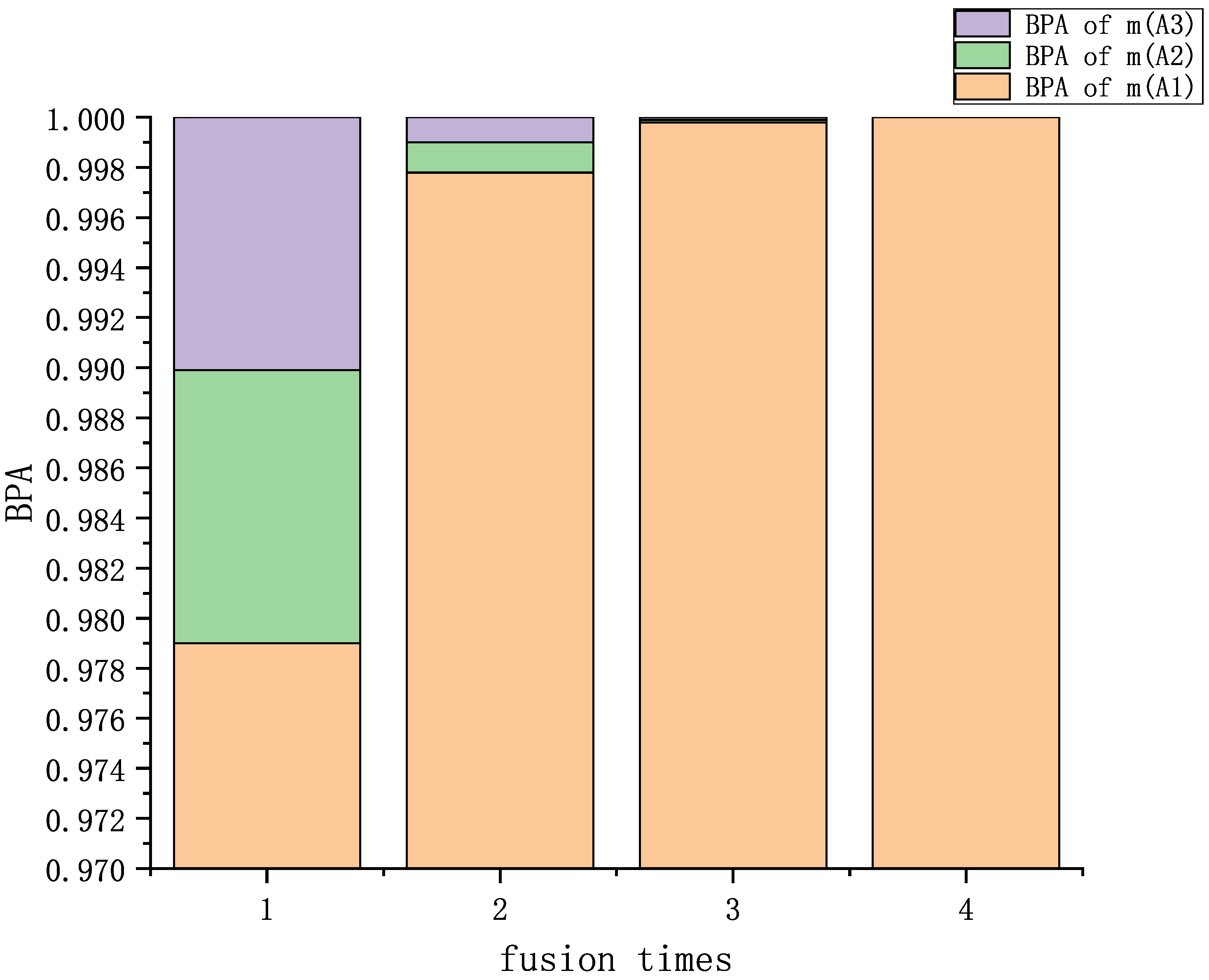
The fusion results of single- and multi-subset conflicting evidence are discussed in this section. Analyzing
Table 2 and
Table 7 and
Figure 2 and
Figure 4, our proposed method has a good fusion effect, and the BPA reaches 0.9999 and 1.0000 in the fourth fusion. The BPA decreases with the increase in fusion time. It shows that the method proposed in this paper can effectively extract the characteristics of the evidence.
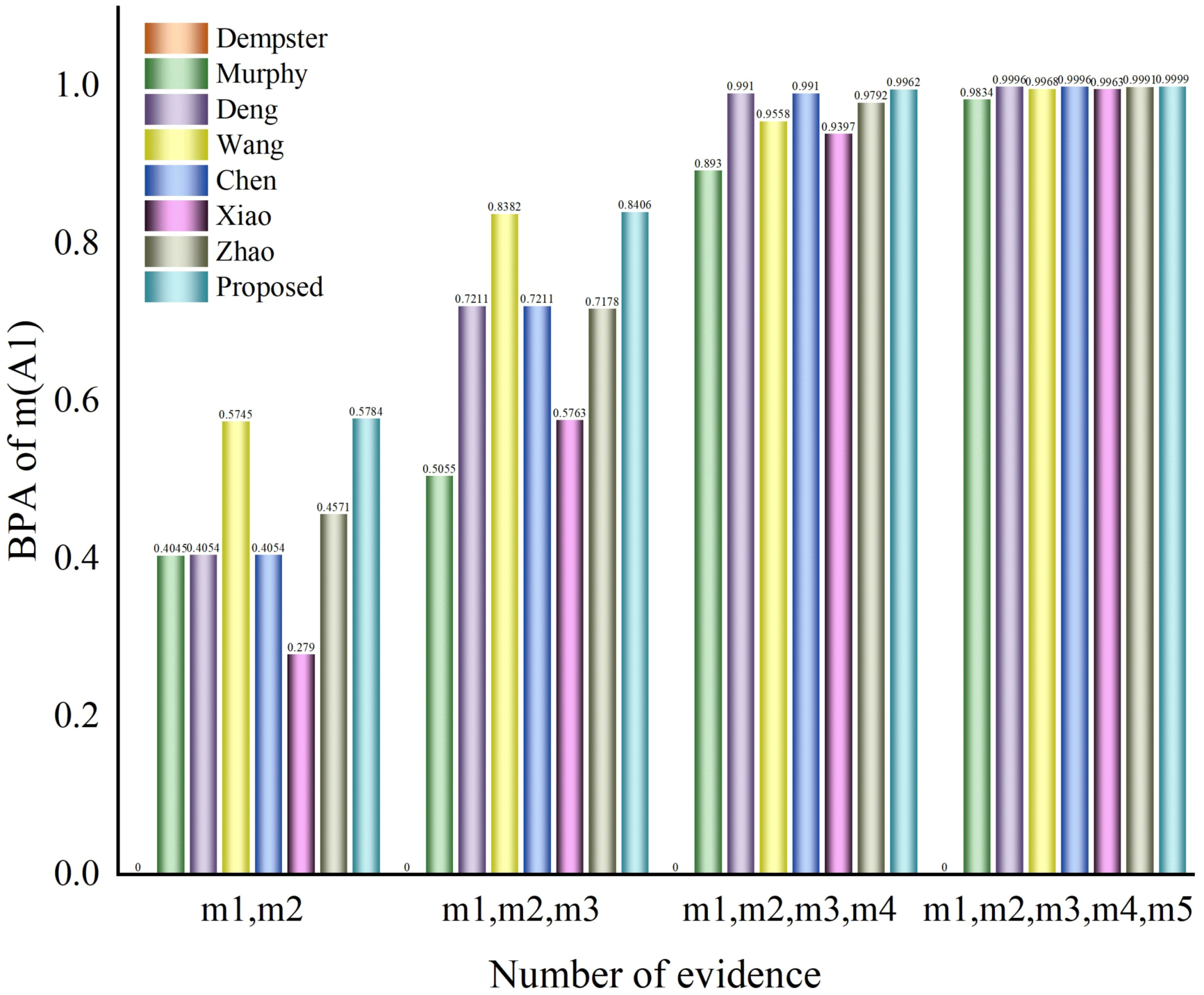
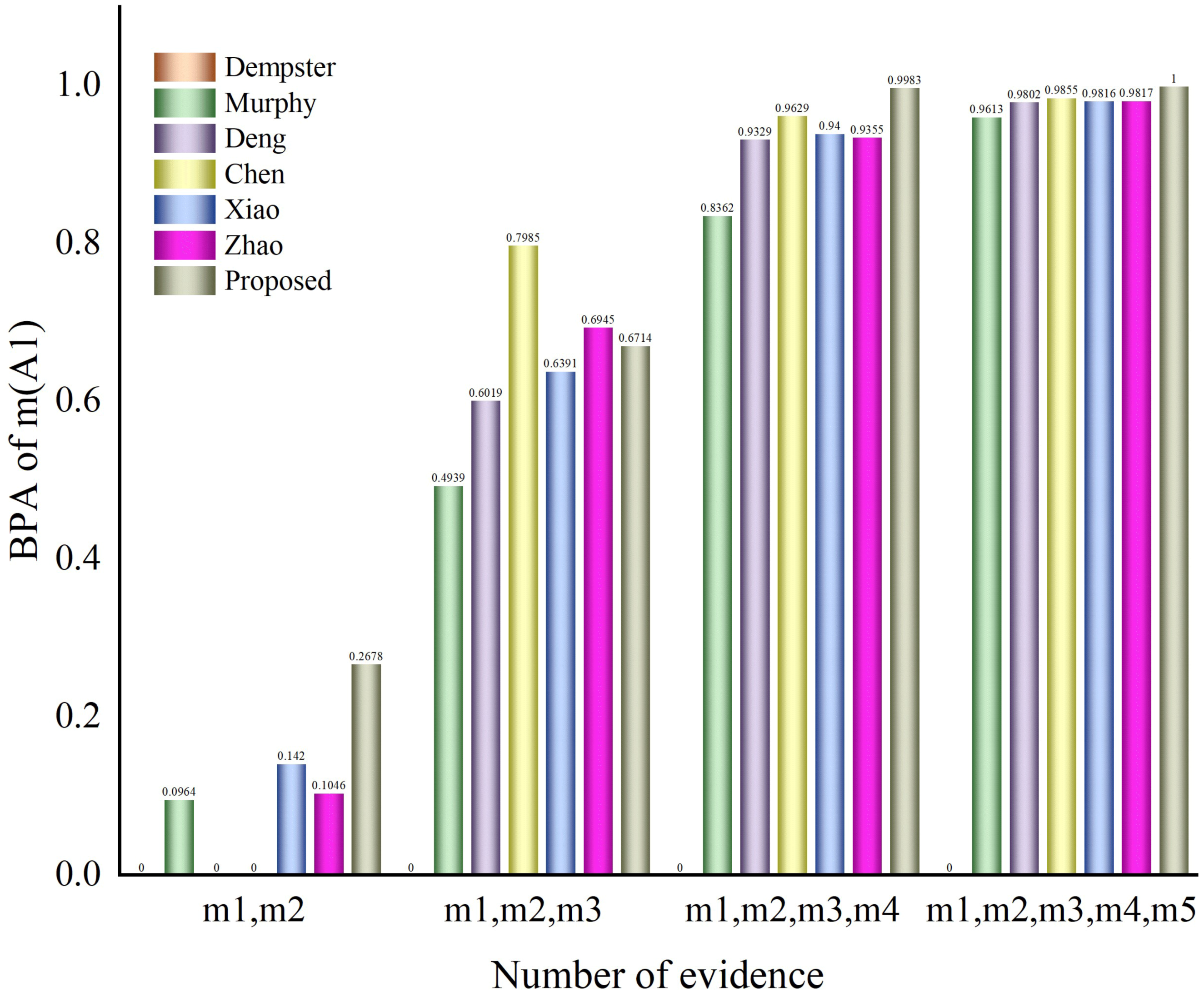
Analyzing
Table 3 and
Table 8 and
Figure 3 and
Figure 5, when the number of pieces of evidence is two or three, our method is not as effective as Chen’s method and Zhao’s method. In the case of a small amount of evidence, the input data are insufficient and it is difficult to extract multiple features from each evidence source. However, with the increase in the number of evidence sources, our method’s accuracy rapidly improves and its accuracy performance is expected to be even better. According to the tables and the figures, it can be seen that our proposed method has a higher accuracy and better effect after three or more fusion processes. Furthermore, for four or more fusion processes, our proposed method has a higher accuracy and better impact in the fusion results of multi-subset conflict examples.
Experiments have shown that the method proposed in this article can effectively extract mutually supportive features between various evidence sources when there are sufficient evidence sources and can achieve good results.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}