
Genetic Algebras Associated with ξ(a)-Quadratic Stochastic Operators


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- (i)
- for each and any , , one has that ;
- (ii)
- for any , and any and one has that ;
- (iii)
- for each and any , , one has that ;
- (iv)
- for any , and any and one has that .
3. A Class of -QSO on 2D Simplex
4. Associativity
| Cases | |||
| 1 | (1,0,0) | (1,0,0) | (1,0,0) |
| 2 | (0,1,0) | (0,1,0) | (0,1,0) |
| 3 | (0,0,1) | (0,0,1) | (0,0,1) |
- (i)
- (ii)
- (iii)
Dynamics of
5. Character
- (i)
- If , then is a character;
- (ii)
- If , then is a character;
- (iii)
- otherwise, there is only a trivial character.
6. Derivations
- (i)
- If all or , then there is only a trivial derivation.
- (ii)
- If or , then there is a nontrivial derivation given by
- (iii)
- If or , then there is a nontrivial derivation given by
- (iv)
- If , then there is a nontrivial derivation given by
- (v)
- If , then there is a nontrivial derivation given by
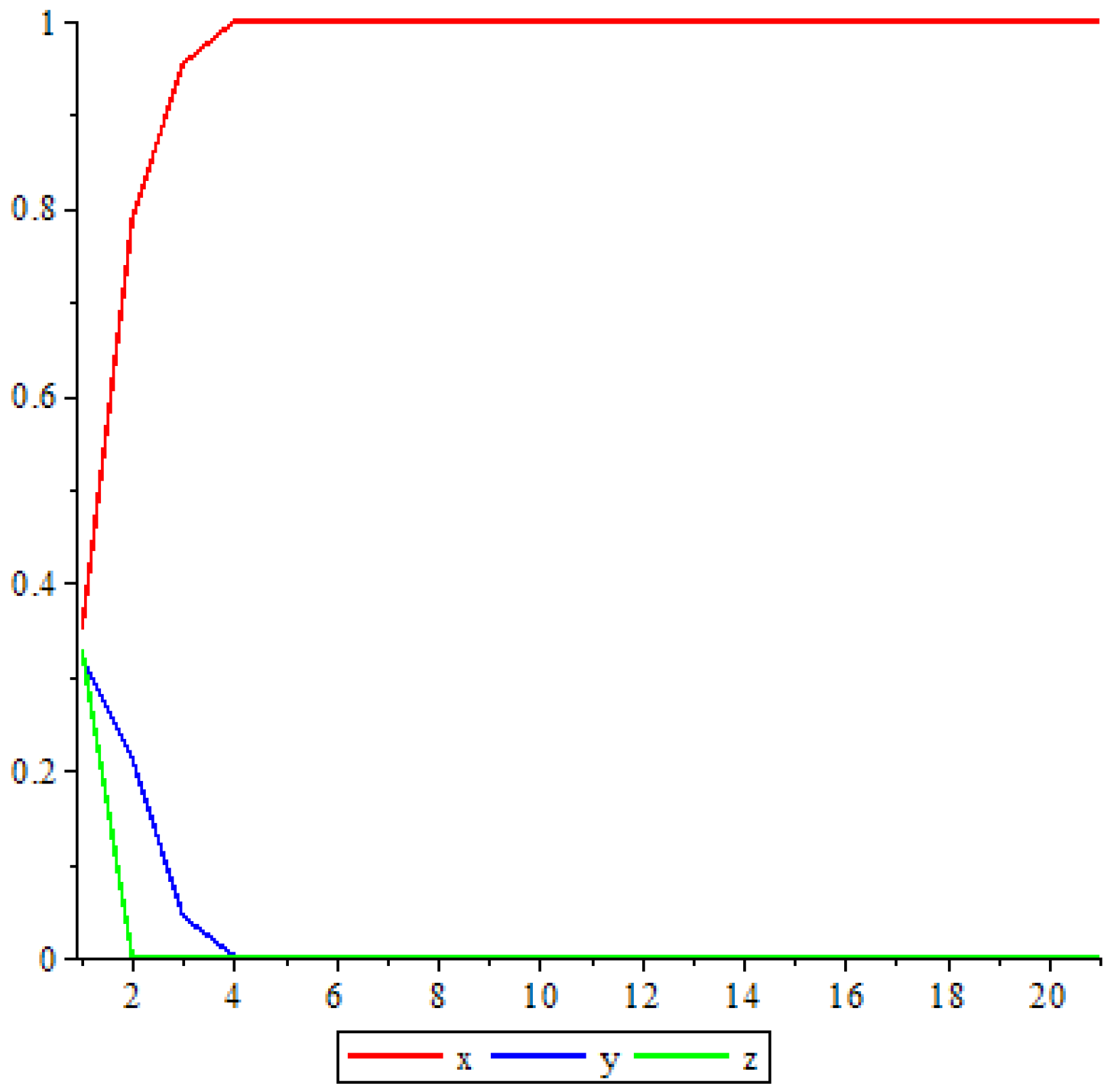
7. Dynamics of Some -QSOs
7.1. Dynamics of
- 1.
- If be any initial point, then
- 2.
- The line is invariant.
- (i)
- If , then all the trajectories of V converge to the fixed point.
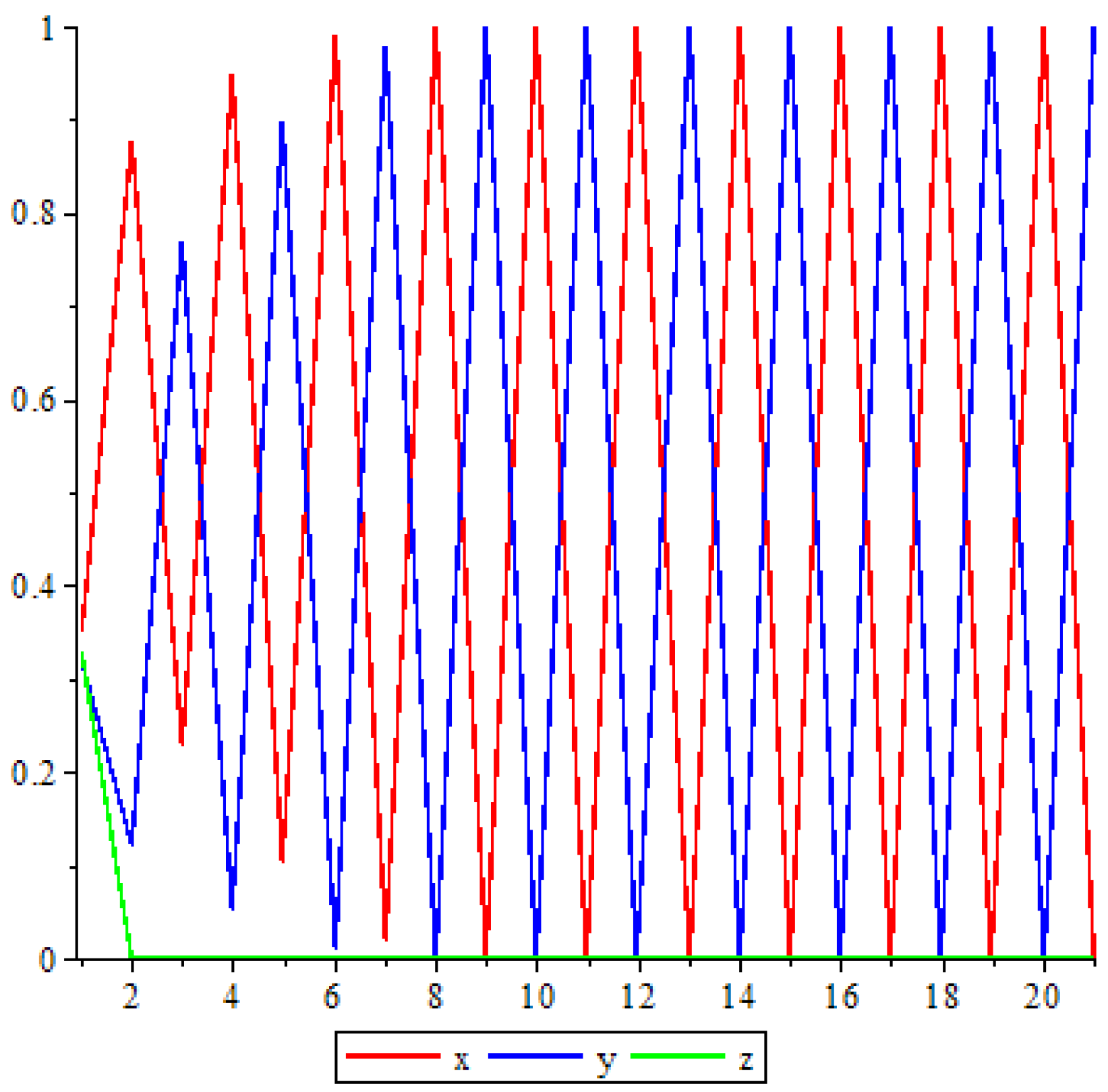
- (ii)
- If , then there exist two periodic points of V, and all trajectories go to them except for the fixed point.
- (i)
- Assume that , thenThe unique fixed point is given by
- (ii)
- Let us assume that , then, keeping in view the above calculations, we haveIn this case, V has two periodic points. To find them, we need to solveThe solutions of this equation areHence, two periodic points are given byWe note thatis a fixed point of .
- (i)
- If then for any we have .
- (ii)
- If then for any one has .
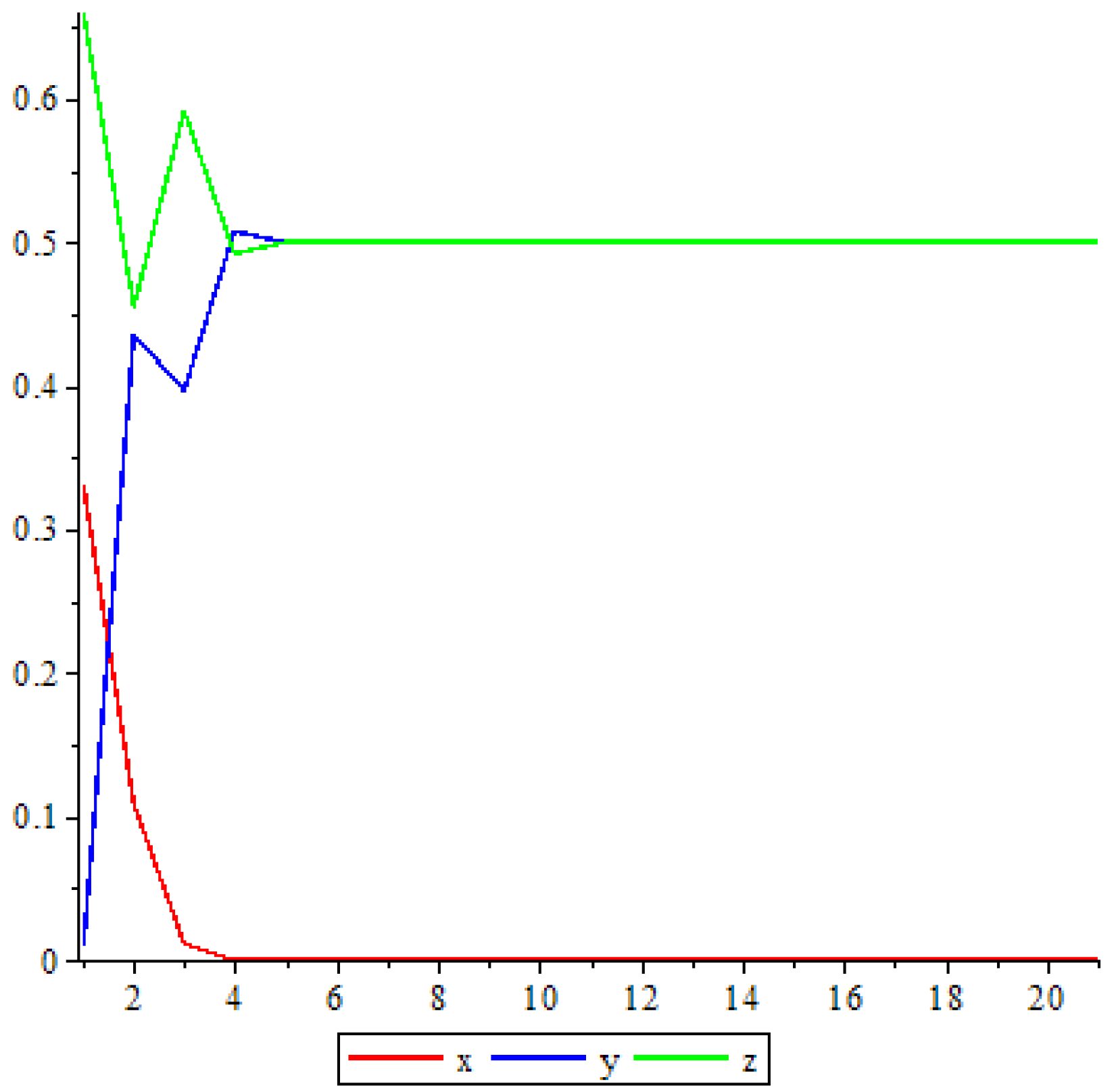
7.2. Dynamics of
- (i)
- .
- (ii)
- If then the sequence is strictly increasing.
- (iii)
- If then if then and if then
7.3. The Dynamic of When
- (i)
- (ii)
- If is any initial point, then
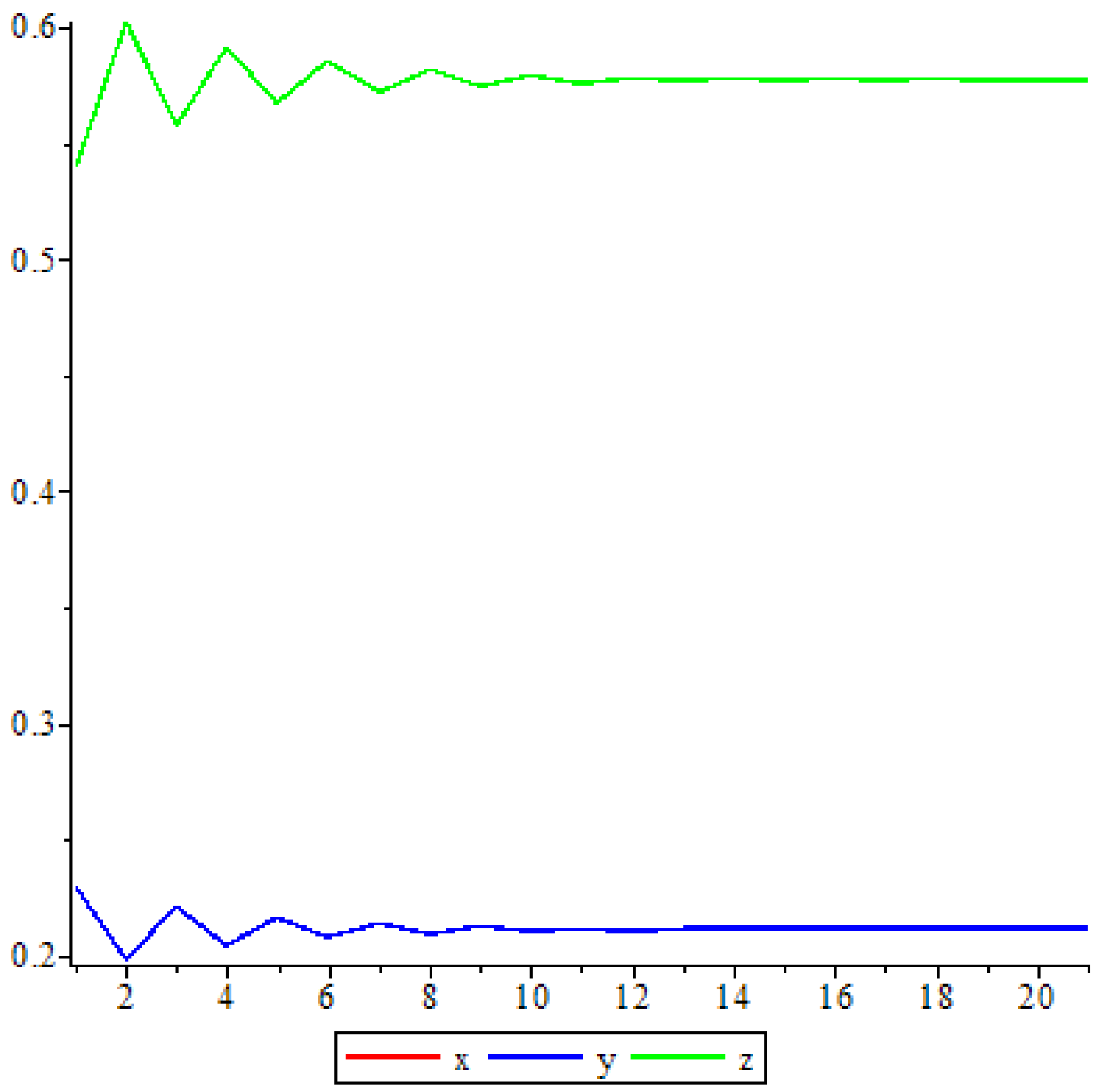
7.4. The Dynamic of When
- (i)
- .
- (ii)
- The line is invariant.
- (iii)
- If is any initial point, then
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bacaer, N. A Short History of Mathematical Population Dynamics; Springer: London, UK, 2011. [Google Scholar]
- Lyubich, Y.I. Mathematical Structures in Population Genetics; Volume 22 of Biomathematics; Springer: Berlin, Germany, 1992. [Google Scholar]
- Worz-Busekros, A. Algebras in Genetics; Lecture Notes in Biomathematics; Springer: Berlin, Germany, 1980; Volume 36. [Google Scholar]
- Figueiredo, A.; Rocha Filho, T.M.; Brenig, L. Algebraic structures and invariant manifolds of differential systems. J. Math. Phys. 1998, 39, 2929–2946. [Google Scholar] [CrossRef]
- Reed, M.L. Algebraic structure of genetic inheritance. Bull. Am. Math. Soc. 1997, 34, 107–130. [Google Scholar] [CrossRef] [Green Version]
- Bernstein, S. Solution of a mathematical problem connected with the theory of heredity. Ann. Math. Stat. 1942, 13, 53–61. [Google Scholar] [CrossRef]
- Lotka, A.J. Undamped oscillations derived from the law of mass action. J. Am. Chem. Soc. 1920, 42, 1595–1599. [Google Scholar] [CrossRef]
- Volterra, V. Lois de fluctuation de la population de plusieurs espèces coexistant dans le même milieu. Assoc. Franc. Lyon 1927, 1926, 96–98. [Google Scholar]
- Holgate, P. Genetic algebras satisfying Bernstein’s stationarity principle. J. Lond. Math. Soc. 1975, 9, 613–623. [Google Scholar] [CrossRef]
- Harrison, D.K. Commutative nonassociative algebras and cubic forms. J. Algebra 1974, 32, 518–528. [Google Scholar] [CrossRef] [Green Version]
- Kesten, H. Quadratic transformations: A model for population growth. II. Adv. Appl. Probab. 1970, 2, 179–228. [Google Scholar] [CrossRef]
- Ganikhodzhaev, R.; Mukhamedov, F.; Rozikov, U. Quadratic stochastic operators and processes: Results and open problems. Infin. Dimens. Anal. Quan. Probab. Relat. Top. 2011, 14, 279–335. [Google Scholar] [CrossRef]
- Jiang, X.; Li, J.; Yin, W.; Sun, L.; Chen, X. Bifurcation, chaos, and circuit realisation of a new four-dimensional memristor system. Int. J. Nonlinear Sci. Numer. Simul. 2022. [Google Scholar] [CrossRef]
- Li, B.; Zohreh, E.; Zakieh, A. Strong resonance bifurcations for a discrete-time prey–predator model. J. Appl. Math. Comput. 2023, 69, 2421–2438. [Google Scholar] [CrossRef]
- Li, B.; Zohreh, E.; Zakieh, A. Dynamical Behaviors of an SIR Epidemic Model with Discrete Time. Fractal Fract. 2022, 6, 659. [Google Scholar] [CrossRef]
- He, Q.; Xia, P.; Hu, C.; Li, B. Public Information, Actual Intervention and Inflation Expectations. Transform. Bus. Econ. 2022, 21, 644–666. [Google Scholar]
- He, Q.; Zhang, X.; Xia, P.; Zhao, C.; Zhao, C. A Comparison Research on Dynamic Characteristics of Chinese and American Energy Prices. J. Glob. Inf. Manag. 2023, 31, 1–16. [Google Scholar] [CrossRef]
- Holgate, P. The Interpretation of derivations in genetic algebras. Linear Algebra Appl. 1987, 85, 75–79. [Google Scholar] [CrossRef] [Green Version]
- Holgate, P. Selfing in genetic algebras. J. Math. Biol. 1978, 6, 197–206. [Google Scholar] [CrossRef]
- Rozikov, U.A. Population Dynamics: Algebraic and Probabilistic Approach; World Scientific Publication: Singapore, 2020. [Google Scholar]
- Mukhamedov, F.; Qaralleh, I.; Rosali, W.N.F.A.W. On ξa-quadratic stochastic operators on 2-D simplex. Sains Malays. 2014, 43, 1275–1281. [Google Scholar]
- Mukhamedov, F.; Saburov, M.; Qaralleh, I. On ξ(s)-quadratic stochastic operators on two dimensional simplex and their behavior. Abst. Appl. Anal. 2013, 2013, 942038. [Google Scholar] [CrossRef]
- El-Qader, H.A.; Ghani, A.T.A.; Qaralleh, I. Classificationn and dynnamics off class of ξ(as)-qso’s. J. Math. Fund. Sci. 2020, 52, 143–173. [Google Scholar] [CrossRef]
- El-Qader, H.A.; Ghani, A.T.A.; Qaralleh, I.; Alsarayreh, A. Dynamics of a nonlinear operators generated from ξ(as)-quadratic stochastic operators. Int. J. Eng. Res. Tech. 2019, 12, 162–171. [Google Scholar]
- Qaralleh, I.; Ahmad, M.Z.; Alsarayreh, A. Associative and derivation of genetic algebra generated from ξ(s)-QSO. AIP Conf. Proc. 2016, 1775, 030060. [Google Scholar]
- Ganikhodjaev, N.N.; Ganikhodjaev, R.N.; Jamilov, U.U. Quadratic stochastic operators and zero-sum game dynamics. Ergod. Theory Dyn. Syst. 2015, 35, 1443–1473. [Google Scholar] [CrossRef]
- Ganikhodzhaev, R.N. Quadratic stochastic operators, Lyapunov functions and tournaments. Sbornik Math. 1993, 76, 489–506. [Google Scholar] [CrossRef]
- Mukhamedov, F.M.; Jamilov, U.U.; Pirnapasov, A.T. On non-ergodic uniform Lotka-Volterra operators. Math. Notes 2019, 105, 258–264. [Google Scholar] [CrossRef]
- Narendra, S.G.; Samaresh, C.M.; Elliott, W.M. On the Volterra and other nonlinear moldes of interacting populations. Rev. Mod. Phys. 1971, 43, 231–276. [Google Scholar]
- Boujemaa, H.; Rachidi, M.; Micali, A. Sur les algabres de Lotka-Volterra. Algebras Groups Geom. 1993, 10, 169–180. [Google Scholar]
- Itoh, Y. Non-associative algebra and Lotka-Volterra equation with ternary interaction. Nonlinear Anal. 1981, 5, 53–56. [Google Scholar] [CrossRef]
- Yoon, S.I. Idempotent elements in the Lotka-Volterra algebra. Commun. Korean Math. Soc. 1995, 10, 123–131. [Google Scholar]
- Yoon, S.I. Automorphisms of Lotka-Volterra algebras. Commun. Korean Math. Soc. 1997, 12, 45–50. [Google Scholar]
- Boujemaa, H.; Rachidi, M.; Micali, A. Dérivations dans les algèbres de Lotka-Volterra. Algebras Groups Geom. 2004, 21, 471–487. [Google Scholar]
- Gonshor, H. Derivations in genetic algebras. Commun. Algebra 1988, 16, 1525–1542. [Google Scholar] [CrossRef]
- Micali, A.; Campos, T.M.M.; Silva, M.C.C.; Ferreira, S.M.M.; Costa, R.C.F. Dérivations dans les algêbres Gametiques. Commun. Algebra 1984, 12, 239–243. [Google Scholar] [CrossRef]
- Mukhamedov, F.; Qaralleh, I. On derivations of genetic algebras. J. Phys. Conf. Ser. 2014, 553, 012004. [Google Scholar] [CrossRef] [Green Version]
- Fernandez, J.C.G.; Garcia, C.I. On Lotka-Volterra algebras. J. Alg. Appl. 2019, 18, 1950187. [Google Scholar] [CrossRef]
- Fernandez, J.C.G.; Garcia, C.I. Derivations of Lotka-Volterra algebras. São Paulo J. Math. Sci. 2019, 13, 292–304. [Google Scholar] [CrossRef]
- Ganikhodzhaev, R.; Mukhamedov, F.; Pirnapasov, A.; Qaralleh, I. Genetic Volterra algebras and their derivations. Commun. Algebra 2018, 48, 1353–1366. [Google Scholar] [CrossRef] [Green Version]
- Jamilov, U.U.; Ladra, M. F-evolution algebra. Filomat 2016, 30, 2637–2652. [Google Scholar] [CrossRef] [Green Version]
- Arenasa, M.; Labra, A.; Paniello, I. Lotka—Volterra coalgebras. Linear Multilinear Algebra 2021, 70, 4483–4497. [Google Scholar] [CrossRef]
- Casas, J.M.; Ladra, M.; Omirov, B.; Turdibaev, R. On the algebraic properties of the human ABO-blood group inheritance pattern. ANZIAM J. 2016, 58, 78–95. [Google Scholar]
- Embong, A.F.; Zulkifly, M.I.E.; Arifin, D.N.A.A. Genetic algebras generated by b-bistochastic quadratic stochastic operators: The character and associativity. Malays. J. Math. Sci. 2023, 17, 25–41. [Google Scholar] [CrossRef]
- Jamilov, U.; Ladra, M. Evolution algebras and dynamical systems of a worm propagation model. Linear Multilinear Algebra 2022, 70, 4097–4116. [Google Scholar] [CrossRef]
- Mukhamedov, F.; Qaralleh, I. S-evolution algebras and their enveloping algebras. Mathematics 2021, 9, 1195. [Google Scholar] [CrossRef]
- Qaralleh, I.; Mukhamedov, F. Volterra evolution algebras and their graphs. Linear Multilinear Algebra 2021, 69, 2228–2244. [Google Scholar] [CrossRef] [Green Version]
- Lyubich, Y.I. Iterations of quadratic maps. Math. Econ. Funct. Anal. Nauka Moscow 1974, 1, 107–138. (In Russian) [Google Scholar]
- Mukhamedov, F.; Ganikhodjaev, N. Quantum Quadratic Operators and Processes; Volume 2133 of Lect. Notes Math.; Springer: Berlin, Germany, 2015. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mukhamedov, F.; Qaralleh, I.; Qaisar, T.; Hasan, M.A. Genetic Algebras Associated with ξ(a)-Quadratic Stochastic Operators. Entropy 2023, 25, 934. https://doi.org/10.3390/e25060934
Mukhamedov F, Qaralleh I, Qaisar T, Hasan MA. Genetic Algebras Associated with ξ(a)-Quadratic Stochastic Operators. Entropy. 2023; 25(6):934. https://doi.org/10.3390/e25060934
Chicago/Turabian StyleMukhamedov, Farrukh, Izzat Qaralleh, Taimun Qaisar, and Mahmoud Alhaj Hasan. 2023. "Genetic Algebras Associated with ξ(a)-Quadratic Stochastic Operators" Entropy 25, no. 6: 934. https://doi.org/10.3390/e25060934