
Blind Deconvolution Based on Correlation Spectral Negentropy for Bearing Fault


Abstract
:1. Introduction
2. The Blind Deconvolution Method
2.1. The Method of Blind Deconvolution
2.2. The Proposed Blind Deconvolution Method
2.2.1. A New Criterion of Blind Deconvolution
2.2.2. Maximization Criterion Based on Correlation Spectral Negentropy
2.2.3. The Optimization of the Filter Length L
3. The Proposed Fault Diagnosis Framework
4. Simulation Signal Analysis
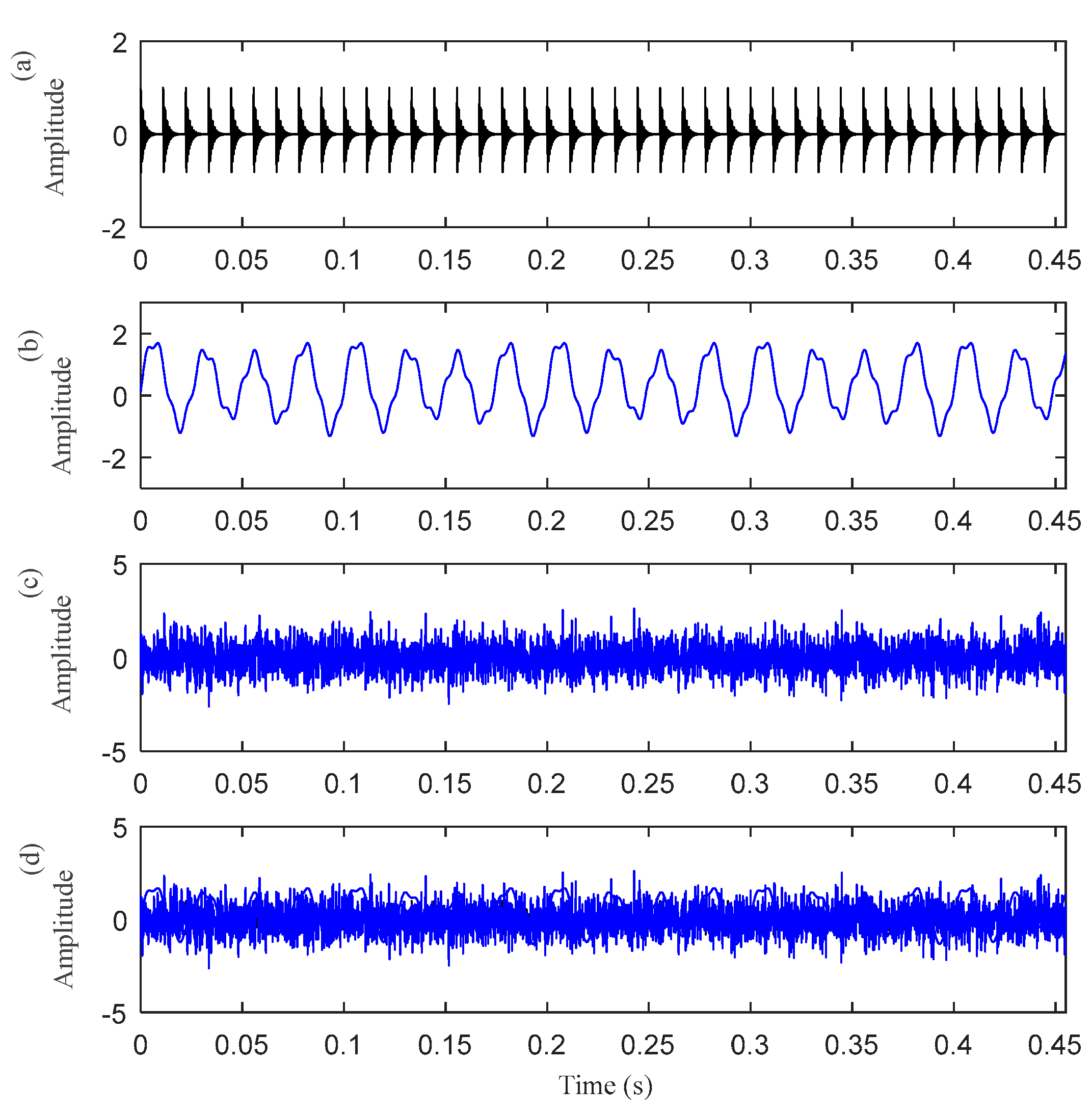
4.1. The Vibration Model with Harmonic Interference
4.2. The Vibration Model with Both Harmonic Interference and Random Impulse Interference
5. Experiment Simulation Signal Analysis
5.1. Inner Race Fault at a Rotation Speed of 1730 rpm
5.2. Roller FAULT at a Rotation Speed of 1772 rpm
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Z.; Li, J.; Ding, W.; Cheng, X.; Meng, Z. A Sparsity–Enhanced Periodic Ogs Model for Weak Feature Extraction of Rolling Bearing Faults. Mech. Syst. Signal Process. 2022, 169, 108733. [Google Scholar] [CrossRef]
- Li, J.; Tao, J.; Ding, W.; Zhang, J.; Meng, Z. Period–Assisted Adaptive Parameterized Wavelet Dictionary and Its Sparse Representation for Periodic Transient Features of Rolling Bearing Faults. Mech. Syst. Signal Process. 2022, 169, 108796. [Google Scholar] [CrossRef]
- Miao, Y.; Zhang, B.; Li, C.; Lin, J.; Zhang, D. Feature Mode Decomposition: New Decomposition Theory for Rotating Machinery Fault Diagnosis. IEEE Trans. Ind. Electron. 2023, 70, 1949–1960. [Google Scholar] [CrossRef]
- He, D.; Wang, X.; Li, S.; Lin, J.; Zhao, M. Identification of Multiple Faults in Rotating Machinery Based on Minimum Entropy Deconvolution Combined with Spectral Kurtosis. Mech. Syst. Signal Process. 2016, 81, 235–249. [Google Scholar] [CrossRef]
- Endo, H.; Randall, R.B. Enhancement of Autoregressive Model Based Gear Tooth Fault Detection Technique by the Use of Minimum Entropy Deconvolution Filter. Mech. Syst. Signal Process. 2007, 21, 906–919. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B.; Endo, H. The Enhancement of Fault Detection and Diagnosis in Rolling Element Bearings Using Minimum Entropy Deconvolution Combined with Spectral Kurtosis. Mech. Syst. Signal Process. 2007, 21, 2616–2633. [Google Scholar] [CrossRef]
- McDonald, G.L.; Zhao, Q.; Zuo, M.J. Maximum Correlated Kurtosis Deconvolution and Application on Gear Tooth Chip Fault Detection. Mech. Syst. Signal Process. 2012, 33, 237–255. [Google Scholar] [CrossRef]
- Miao, Y.; Zhao, M.; Lin, J.; Lei, Y. Application of an Improved Maximum Correlated Kurtosis Deconvolution Method for Fault Diagnosis of Rolling Element Bearings. Mech. Syst. Signal Process. 2017, 92, 173–195. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, J.; Zhong, M.; Zhong, J.; Zheng, J.; Yao, L. Detection for Incipient Damages of Wind Turbine Rolling Bearing Based on VMD–AMCKD Method. IEEE Access 2019, 7, 67944–67959. [Google Scholar] [CrossRef]
- McDonald, G.L.; Zhao, Q. Multipoint Optimal Minimum Entropy Deconvolution and Convolution Fix: Application to vibration fault detection. Mech. Syst. Signal Process. 2017, 82, 461–477. [Google Scholar] [CrossRef]
- Xiao, C.; Tang, H.; Ren, Y.; Xiang, J.; Kumar, A. Adaptive MOMEDA Based on Improved Advance–Retreat Algorithm for Fault Features Extraction of Axial Piston Pump. ISA Trans. 2022, 128, 503–520. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.; Zhou, N.; Zhang, W.; Wang, Z. Application of an Improved Minimum Entropy Deconvolution Method for Railway Rolling Element Bearing Fault Diagnosis. J. Sound Vib. 2018, 425, 53–69. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, Z.; Zhang, W.; Huang, G. Particle Swarm Optimization Algorithm to Solve the Deconvolution Problem for Rolling Element Bearing Fault Diagnosis. ISA Trans. 2019, 90, 244–267. [Google Scholar] [CrossRef] [PubMed]
- Buzzoni, M.; Antoni, J.; D’Elia, G. Blind Deconvolution Based on Cyclostationarity Maximization and Its Application to Fault Identification. J. Sound Vib. 2018, 432, 569–601. [Google Scholar] [CrossRef]
- Zhang, B.; Miao, Y.; Lin, J.; Yi, Y. Adaptive Maximum Second–Order Cyclostationarity Blind Deconvolution and Its Application for Locomotive Bearing Fault Diagnosis. Mech. Syst. Signal Process. 2021, 158, 107736. [Google Scholar] [CrossRef]
- Zhang, K.; Xu, Y.; Liao, Z.; Song, L.; Chen, P. A novel Fast Entrogram and its applications in rolling bearing fault diagnosis. Mech. Syst. Signal Process. 2021, 154, 107582. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, B.; Xin, Q.; Chen, H. Ewtfergram and Its Application in Fault Diagnosis of Rolling Bearings. Measurement 2022, 190, 110695. [Google Scholar] [CrossRef]
- Tang, G.; Pang, B.; He, Y.; Tian, T. Gearbox Fault Diagnosis Based on Hierarchical Instantaneous Energy Density Dispersion Entropy and Dynamic Time Warping. Entropy 2019, 21, 593. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, Y.; Chen, B.; Mei, G.; Wang, Z.; Zhang, W. A Novel Blind Deconvolution Method and Its Application to Fault Identification. J. Sound Vib. 2019, 460, 114900. [Google Scholar] [CrossRef]
- Miao, Y.; Wang, J.; Zhang, B.; Li, H. Practical Framework of Gini Index in the Application of Machinery Fault Feature Extraction. Mech. Syst. Signal Process. 2022, 165, 108333. [Google Scholar] [CrossRef]
- Case Western Reserve University Bearing Data Center [EB/OL]. 2018. Available online: https://csegroups.case.edu/bearingdatacenter/pages/download–data–file (accessed on 20 June 2021).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | M | D | A1 | ξ | fn (Hz) | fd (Hz) | T0 (s) |
|---|---|---|---|---|---|---|---|
| Value | 41 | 1 | 1 | 0.05 | 2000 | 1998 | 1/90 |
| Parameter | A2 | A3 | A4 | f1 (Hz) | f2 (Hz) | f3 (Hz) |
|---|---|---|---|---|---|---|
| Value | 1.2 | 0.5 | 0.2 | 40 | 30 | 150 |
| Parameter | P1 | M1 | ξ1 | fn1 (Hz) | f4 (Hz) |
|---|---|---|---|---|---|
| Value | 8 | 1 | 0.03 | 2500 | 2499 |
| Kurtosis | Gini | CSNE | |
|---|---|---|---|
| o(t) | 0.0028 | 0.7516 | 0.726 |
| h(t) | 0.0005 | 0.3476 | 0.0069 |
| r(t) | 0.0802 | 0.9921 | 0.5549 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, T.; Tang, G.-J.; Tian, Y.-C.; Wang, X.-L. Blind Deconvolution Based on Correlation Spectral Negentropy for Bearing Fault. Entropy 2023, 25, 543. https://doi.org/10.3390/e25030543
Tian T, Tang G-J, Tian Y-C, Wang X-L. Blind Deconvolution Based on Correlation Spectral Negentropy for Bearing Fault. Entropy. 2023; 25(3):543. https://doi.org/10.3390/e25030543
Chicago/Turabian StyleTian, Tian, Gui-Ji Tang, Yin-Chu Tian, and Xiao-Long Wang. 2023. "Blind Deconvolution Based on Correlation Spectral Negentropy for Bearing Fault" Entropy 25, no. 3: 543. https://doi.org/10.3390/e25030543