
Optimized Ship-Radiated Noise Feature Extraction Approaches Based on CEEMDAN and Slope Entropy



Abstract
:1. Introduction
2. Theoretical Background
2.1. CEEMDAN
- Step 1: Add Gaussian white noise to the initial signal x(t) to obtain a new signal y(t) and apply the EMD algorithm to decompose the signal y(t) to obtain the first mode component of CEEMDAN:where is the standard deviation of the added white noise, is Gaussian white noise with unit variance under the condition of the j-th ensemble number, N is the total ensemble, and is defined as the j-th mode component of EMD decomposition.
- Step 2: Determine the residual component after the first decomposition.
- Step 3: Use the residual signal after adding white noise as a new signal ) to be decomposed, and, through the same process, obtain the second mode component (t) and residual component .where (*) is the function of extracting the j-th IMF, which is decomposed of the EMD decomposition.
- Step 4: Repeat the above steps until the stop condition is met. That is, once the residual signal is a monotonic function the cycle ends to obtain the K IMF components and remaining residual components . The original signal is decomposed as follows:
2.2. Slopen
- Step 1: Given a time series , the extracted sequences are , …, , where the embedded dimension is m and .
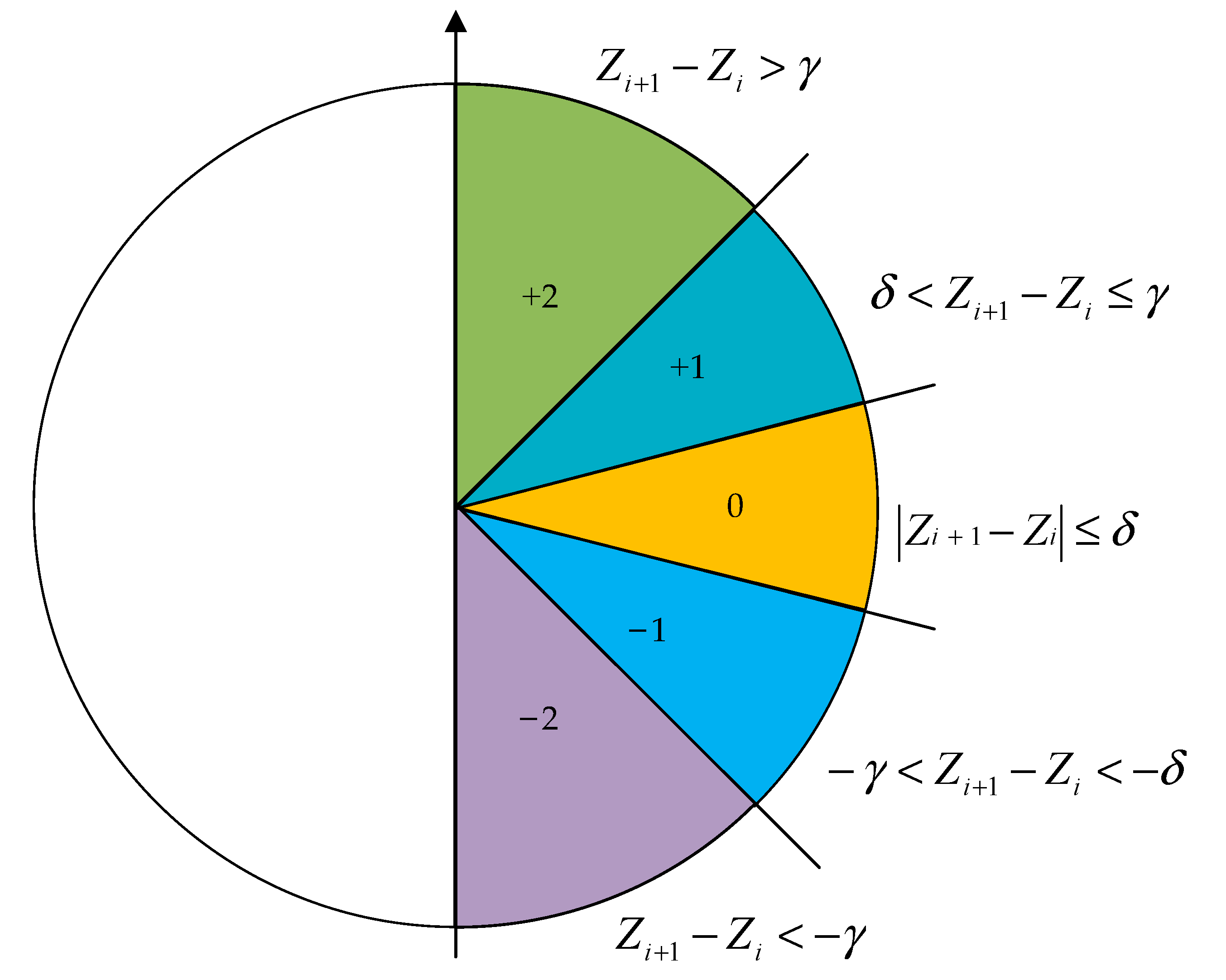
- Step 2: Dividing symbolic patterns by two thresholds ( and ). If , the symbol is defined as +2; if , the symbol is defined as +1; if , the symbol is defined as 0; if , the symbol is defined as −1; and if , the symbol is defined as −2, where . Figure 1 shows the division of symbol patterns.
- Step 3: The symbol pattern sequences obtained from the previous step are , , …, , where is the symbol corresponding to and .
- Step 4: The total number of types of symbol pattern sequences is recorded as , the corresponding number of different types of sequences is recorded as S, and the relative frequency of occurrence is recorded as:
- Step 5: Therefore, Slopen is defined as follows:where is the relative frequency of occurrence.
3. Feature Extraction Approach
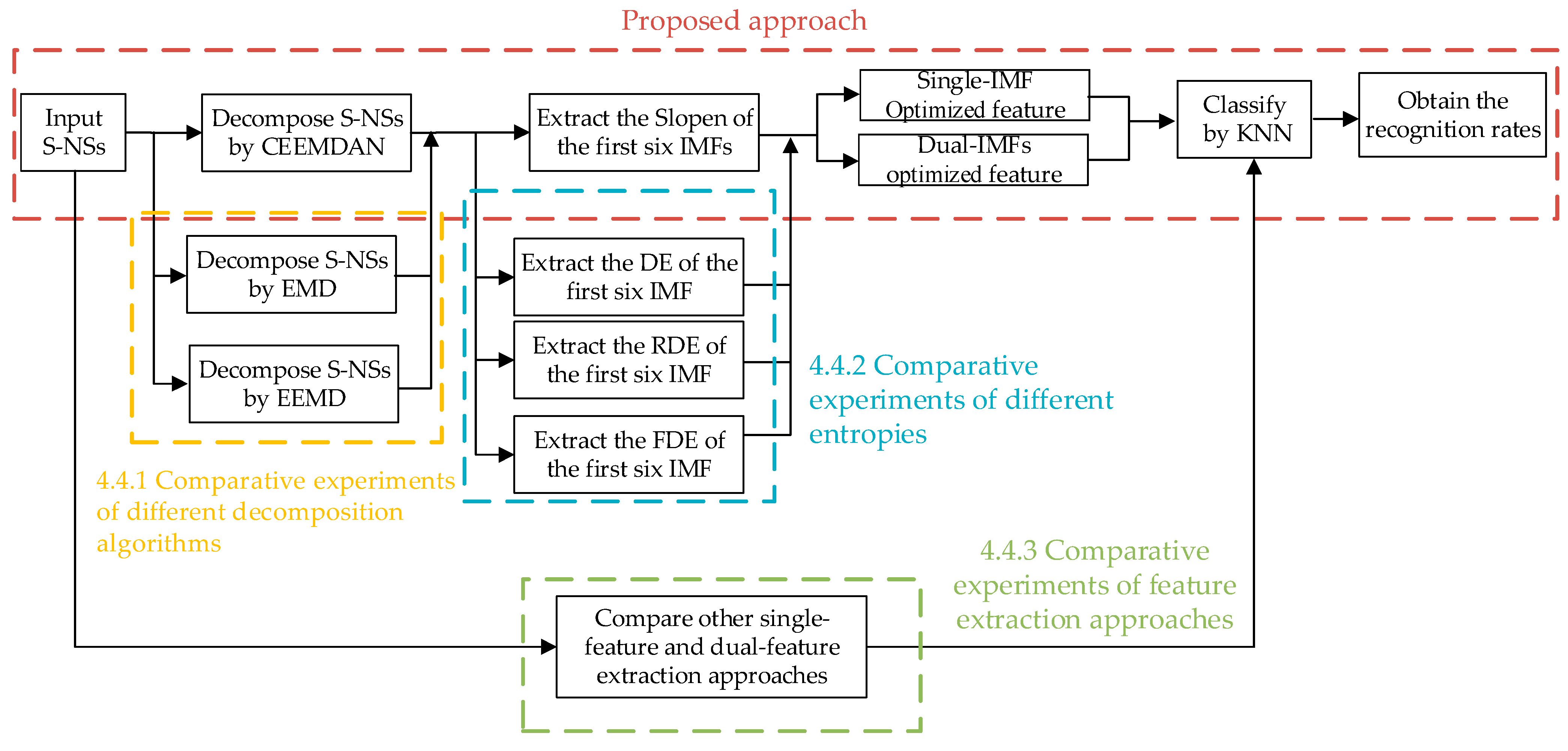
- (1)
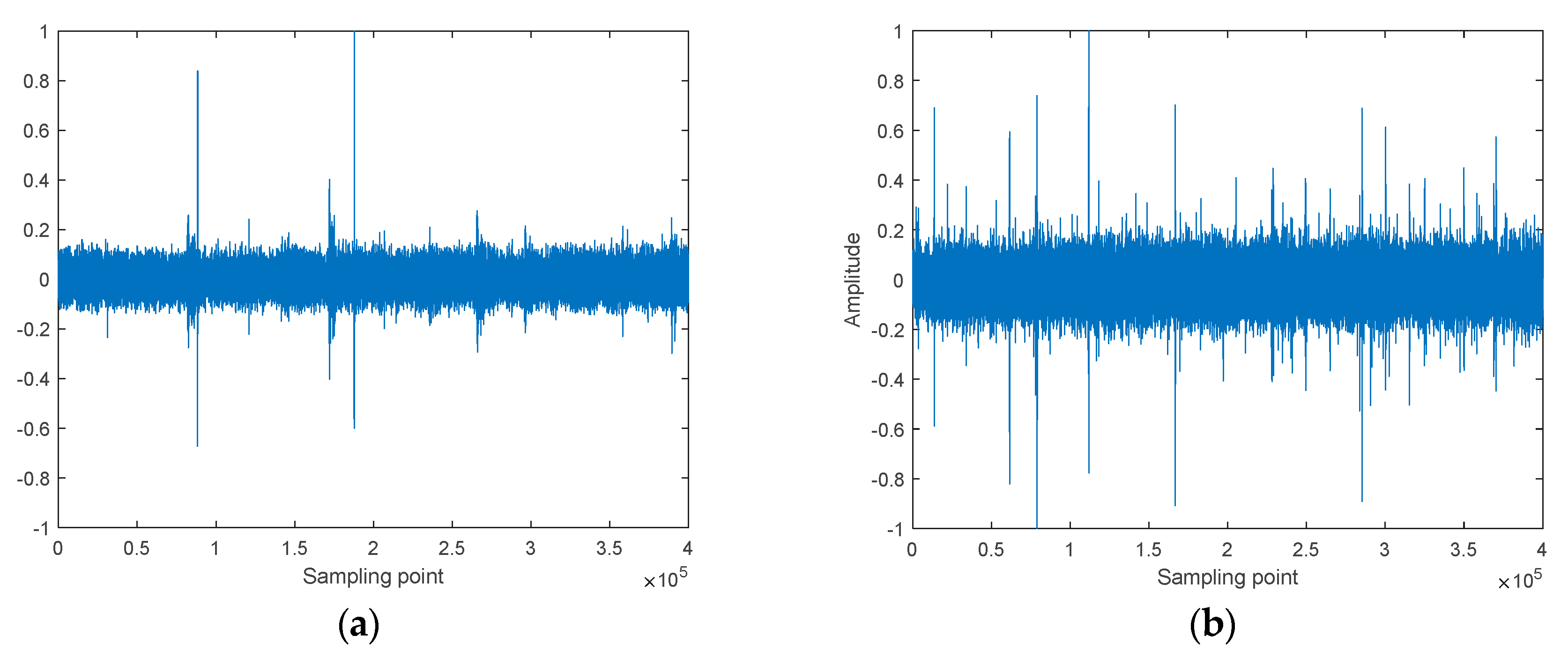
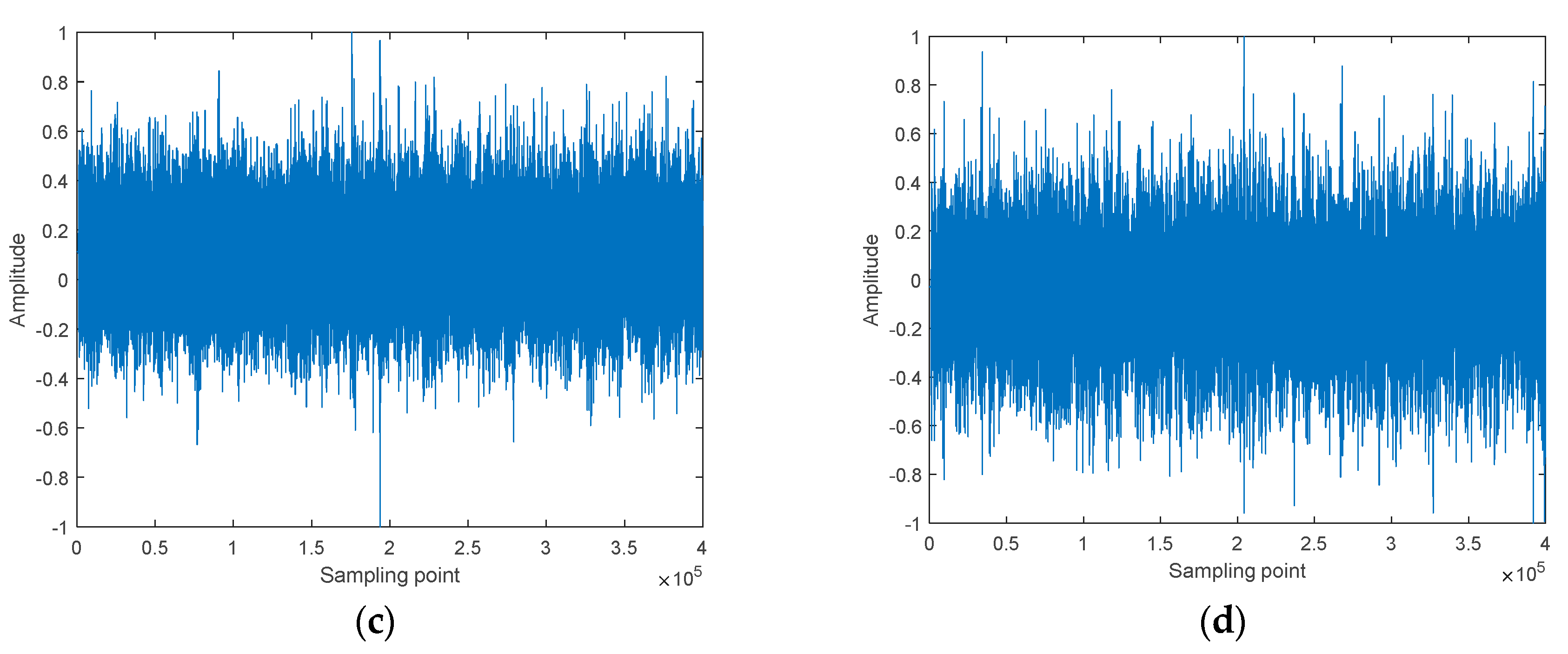
- Four types of S-NSs were obtained and used as the study subjects for the experiments;
- (2)
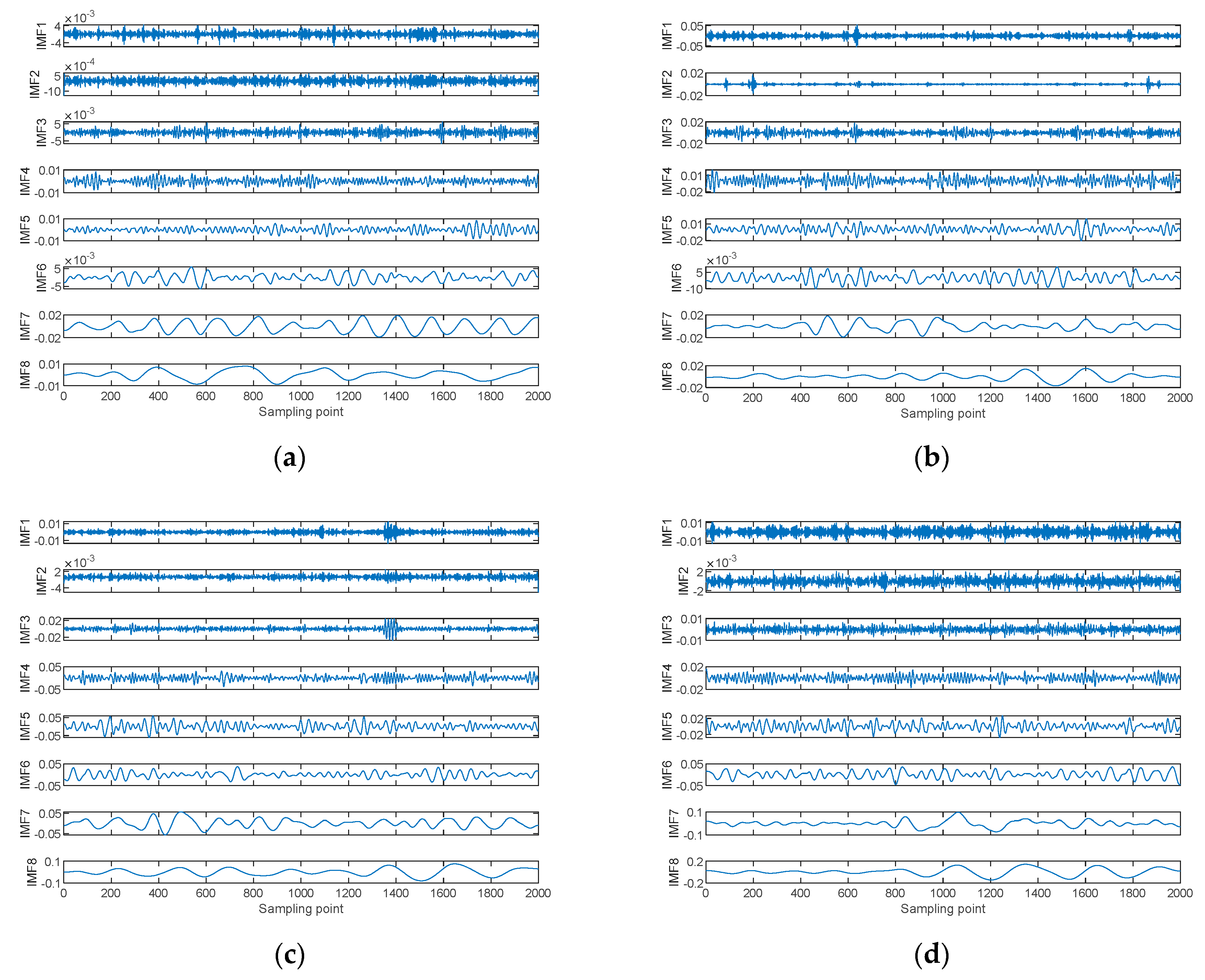
- S-NSs were decomposed into several IMFs using CEEMDAN; subsequently, using Slopen as the feature, the first six IMFs were selected for feature extraction; in addition, comparisons with some classical decomposition algorithms, such as EMD and EEMD, were made;
- (3)
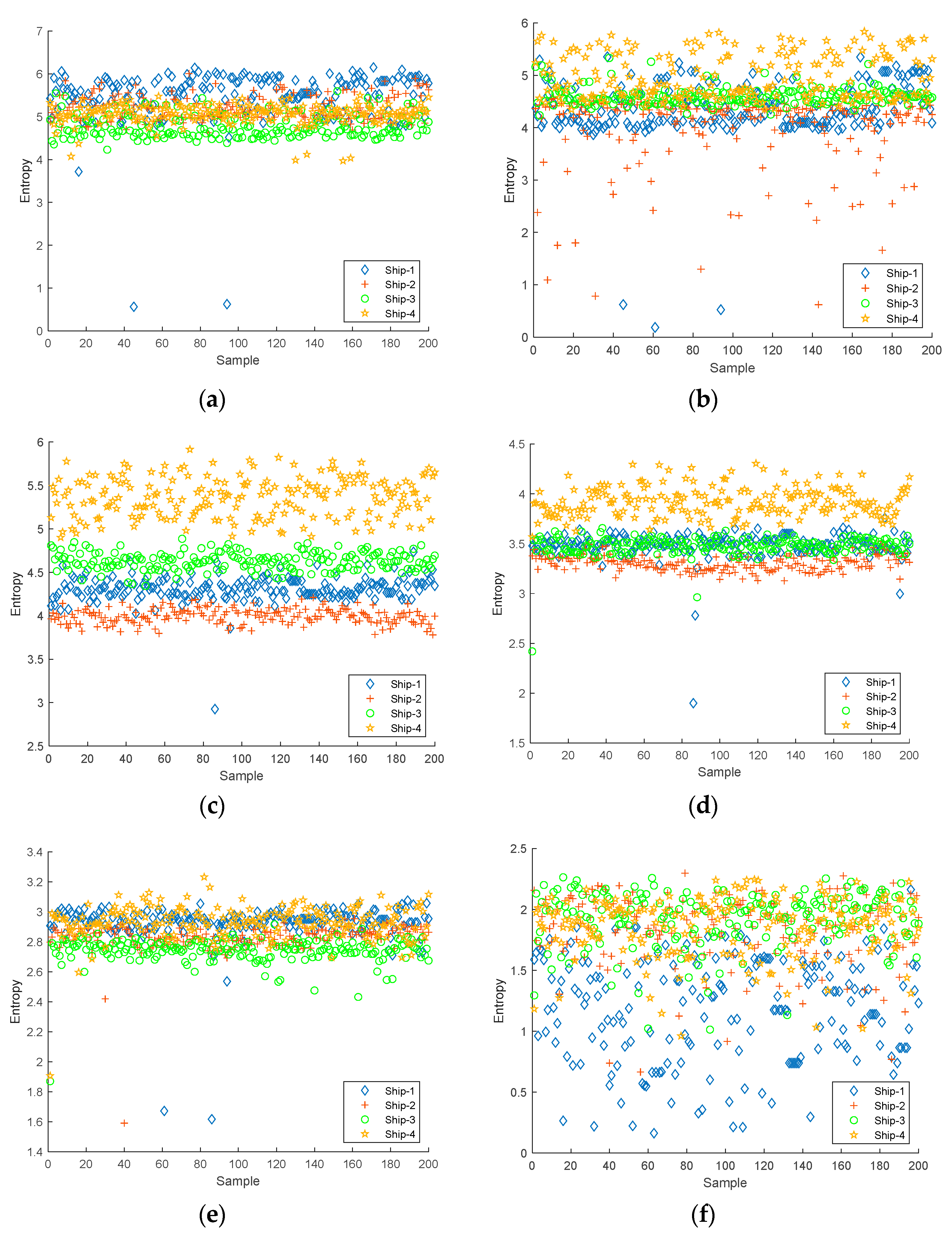
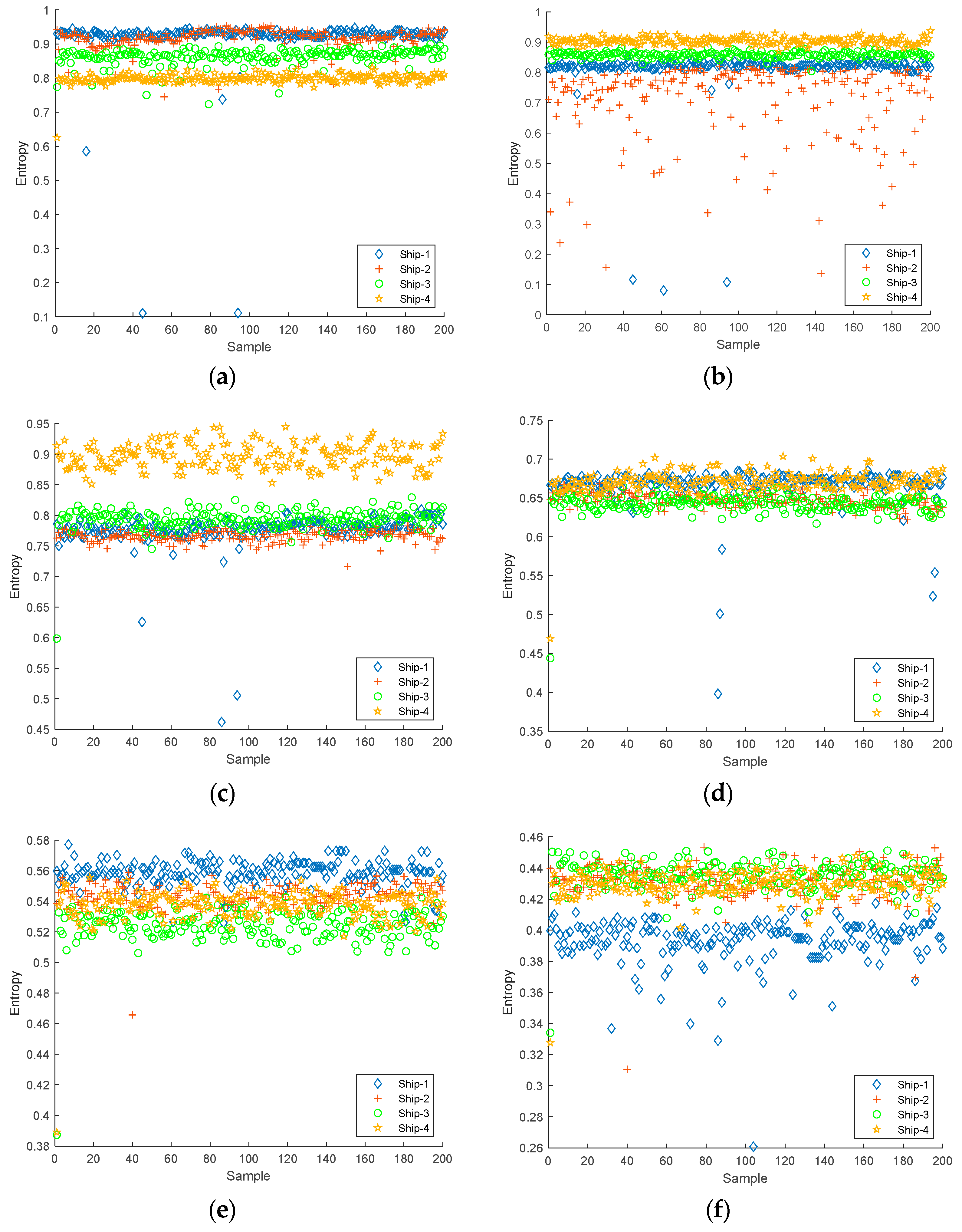
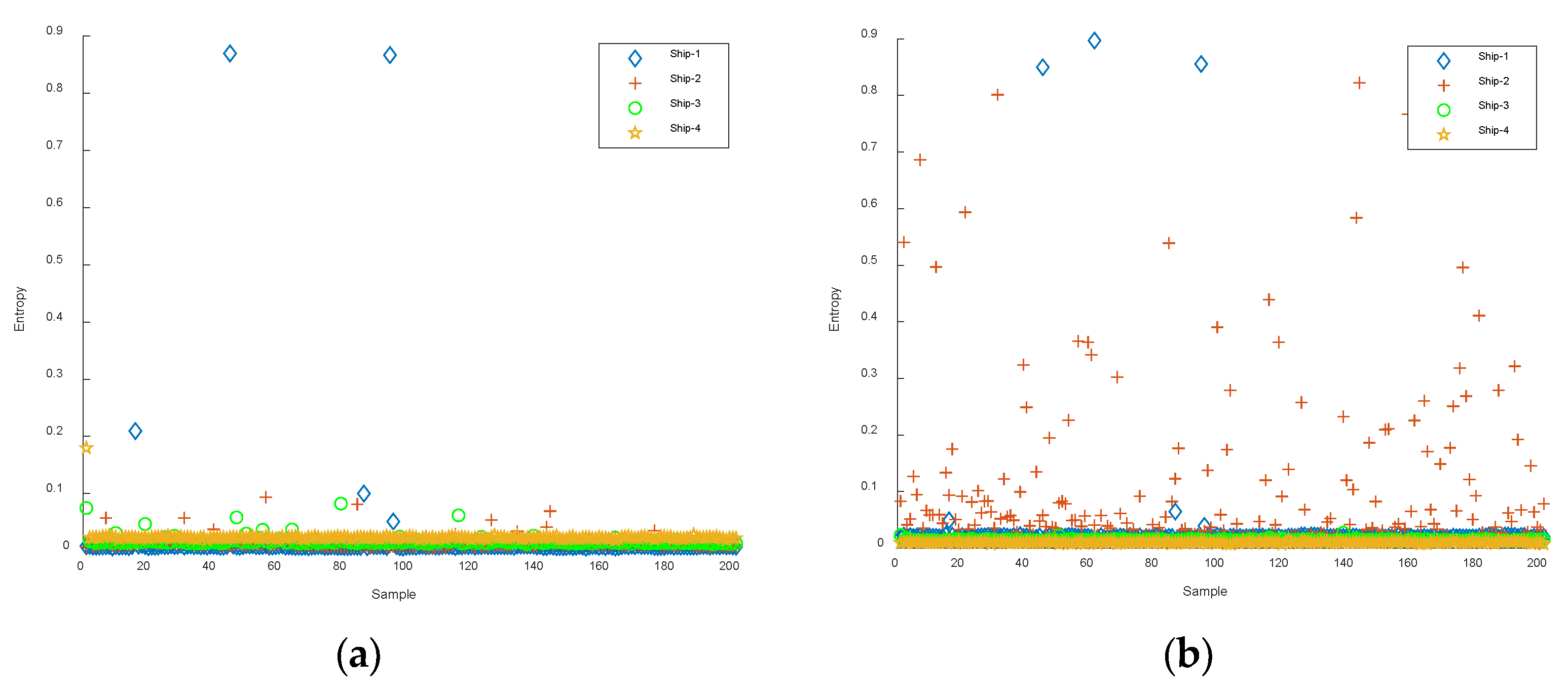
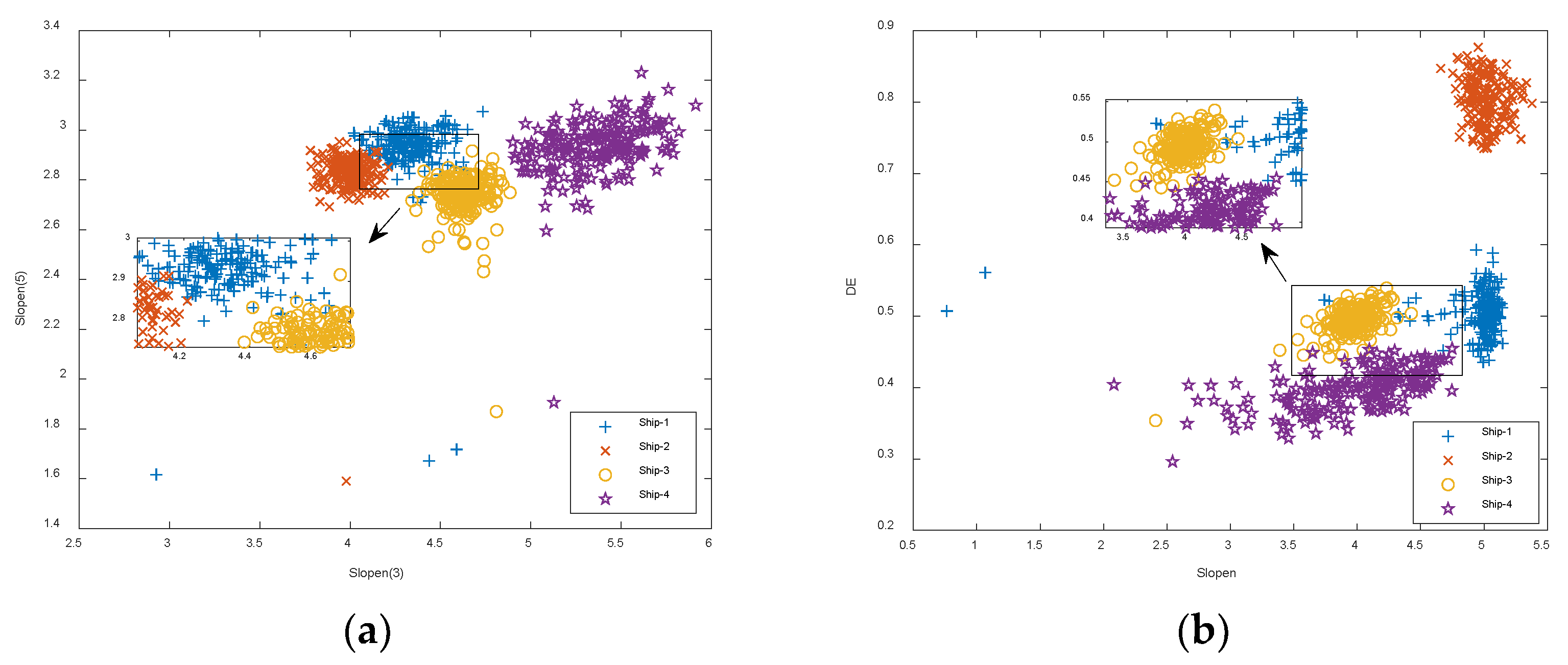
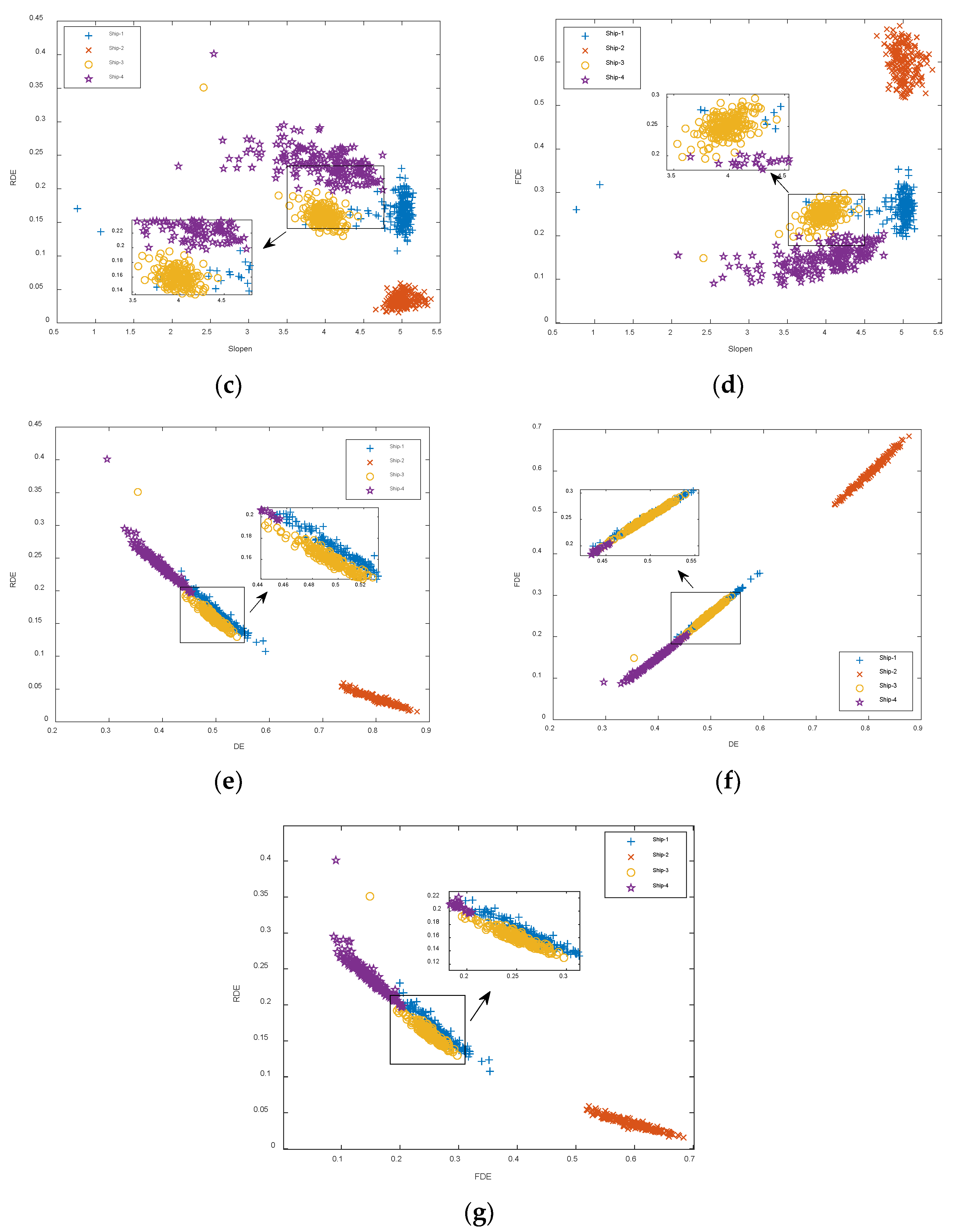
- The Slopens of the first six IMFs were extracted and the single-IMF and dual-IMF optimized feature extraction experiments were carried out; concurrently, the DE, RDE, and FDE of the IMF were extracted, respectively, and comparative experiments were performed.
- (4)
- KNN was adopted to classify four types of S-NSs; then, the recognition rates were obtained and compared with the other single-feature and dual-feature extraction approaches based on the original S-NSs.
4. Feature Extraction and Classification of S-NSs
4.1. Four Types of S-NSs
4.2. The Decomposition of S-NSs
4.3. Feature Extraction
4.4. Classification and Recognition
4.4.1. Comparative Experiments of Different Decomposition Algorithms
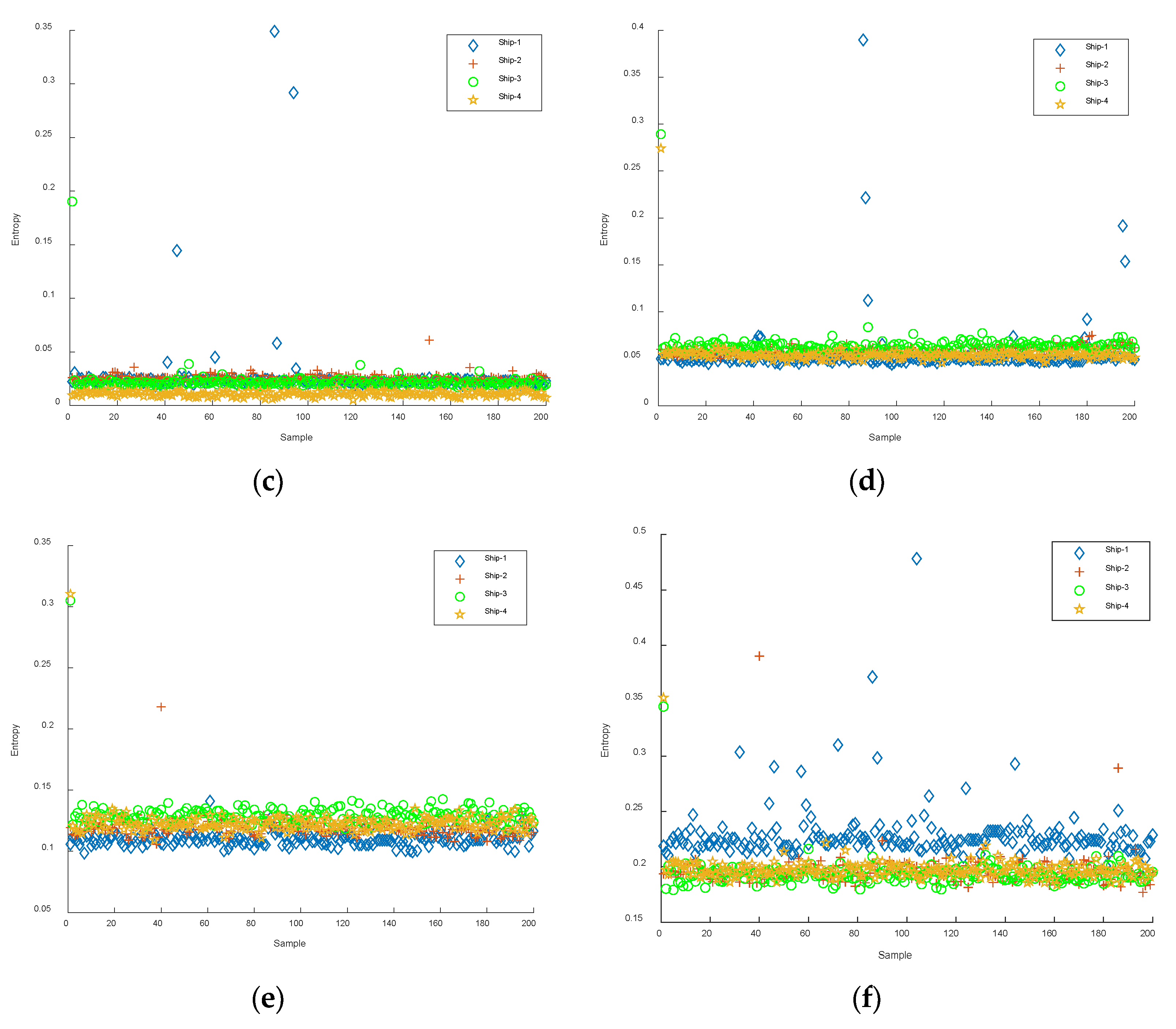
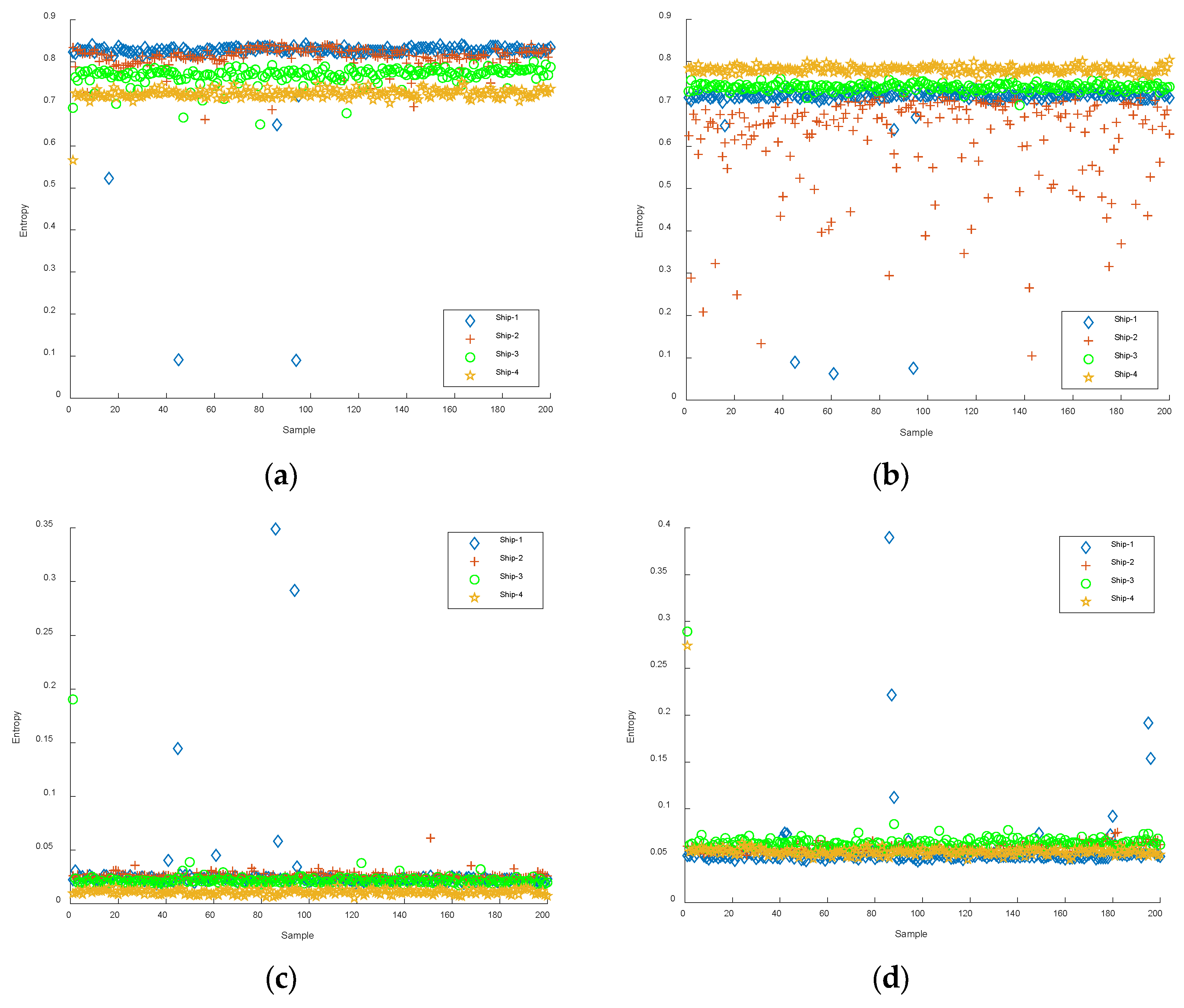
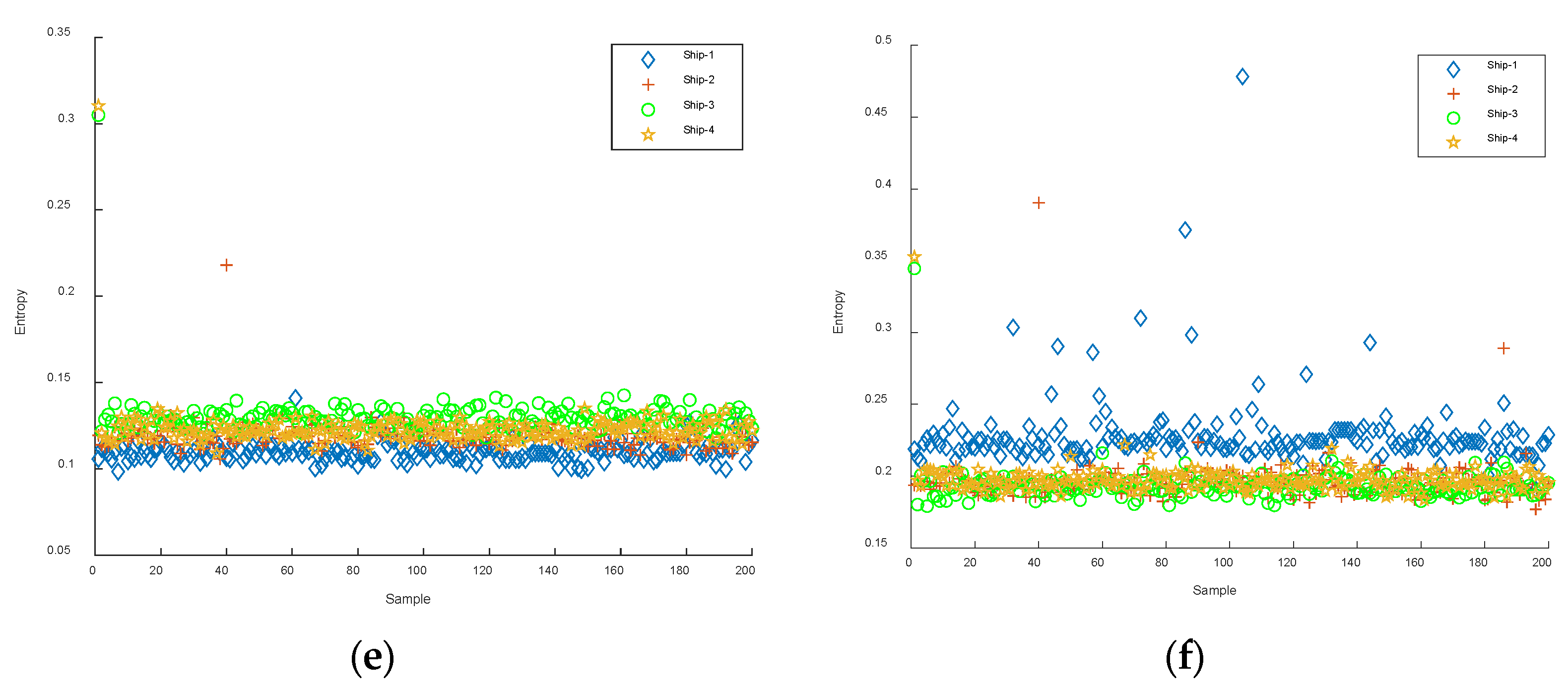
4.4.2. Comparative Experiments of Different Entropies
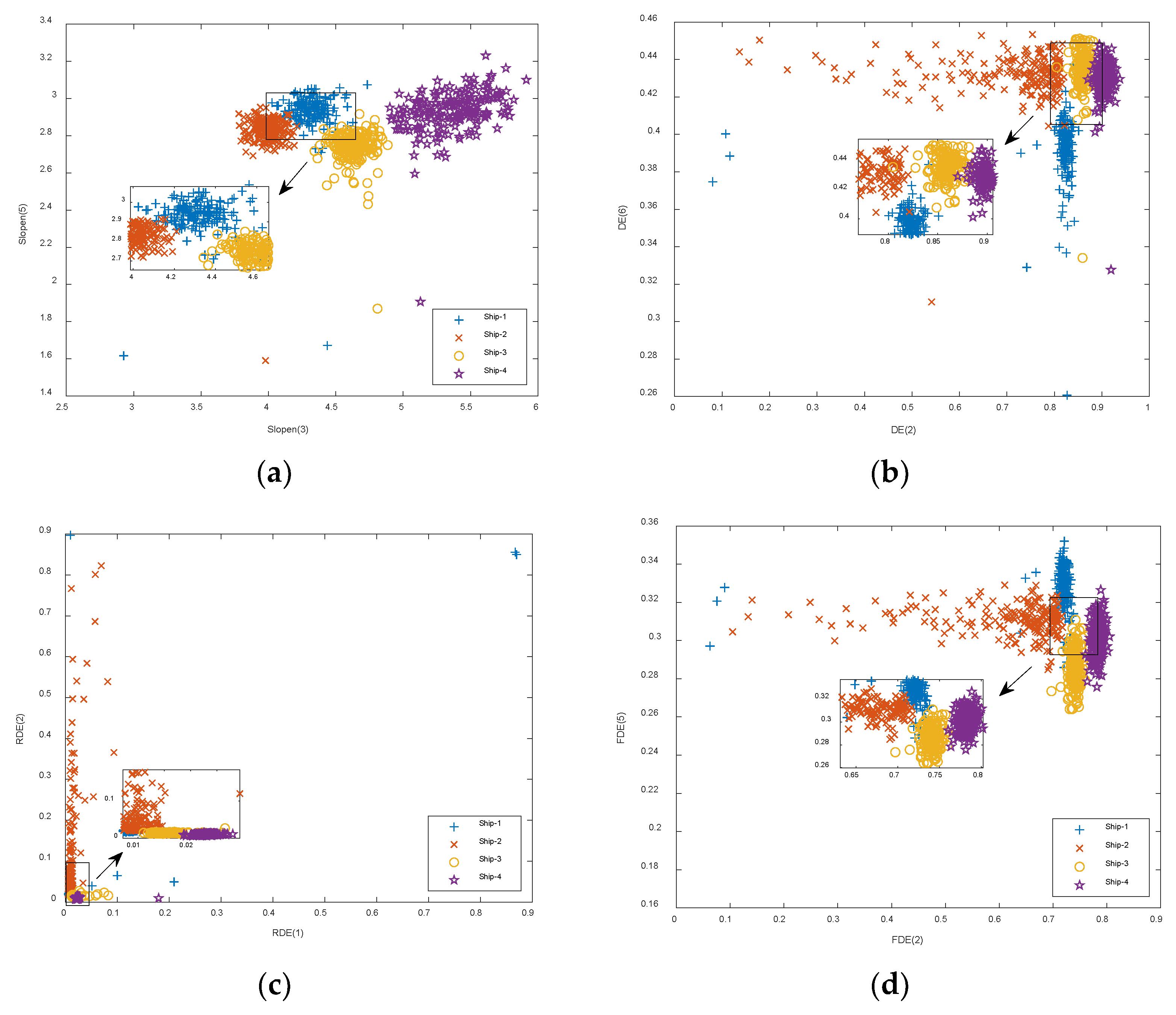
4.4.3. Comparative Experiments of Feature Extraction Approaches
5. Conclusions
- (1)
- Slopen was introduced as the new feature in the feature extraction of S-NSs; moreover, combined with CEEMDAN, this paper proposed CEEMDAN-Single-Slopen and CEEMDAN-Dual-Slopen approaches for S-NSs.
- (2)
- Under the condition of a single feature, whether altering the decomposition algorithm, altering the entropy, or directly extracting the features of the S-NSs, the proposed CEEMDAN-Single-Slopen approach had the highest recognition rate of 90.5%.
- (3)
- The proposed CEEMDAN-Dual-Slopen approach further improved the classification performance of the CEEMDAN-Single-Slopen approach with a 7.1% improvement in recognition rate, and was better than other ship signal-based and IMF-based approaches under the dual-feature condition.
- (4)
- Slopen was shown to be a good approach for extracting S-NSs features by analyzing the complexity of S-NSs. In the future, we will improve the slope entropy by combining the concepts of multi-scale and hierarchy to further improve the performance of the feature extraction approach.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, X.; Li, Y.; Yang, K. On the dynamics of ocean ambient noise: Two decades later. Chaos 2015, 25, 103117. [Google Scholar]
- Jiang, J.; Shi, T.; Huang, M.; Xiao, Z. Multi-Scale Spectral Feature Extraction for Underwater Acoustic Target Recognition. Measurement 2020, 166, 108227. [Google Scholar] [CrossRef]
- Yuan, F.; Ke, X.; Cheng, E. Joint Representation and Recognition for Ship-Radiated Noise Based on Multimodal Deep Learning. J. Mar. Sci. Eng. 2019, 7, 380. [Google Scholar] [CrossRef]
- David, S.D.; Soledad, T.G.; Antonio, C.L.; Antonio, P.G. ShipsEar: An underwater vessel noise database. Appl. Acoust. 2016, 113, 64–69. [Google Scholar]
- Li, Y.; Geng, B.; Jiao, S. Dispersion Entropy-based Lempel-Ziv Complexity: A New Metric for Signal Analysis. Chaos Solitons Fractals 2022, 161, 112400. [Google Scholar] [CrossRef]
- Bao, F.; Li, C.; Wang, X.; Wang, Q.; Du, S. Ship classification using nonlinear features of radiated sound: An approach based on empirical mode decomposition. J. Acoust. Soc. Am. 2010, 128, 206–214. [Google Scholar] [CrossRef]
- Yang, S.; Li, Z.; Wang, X. Ship recognition via its radiated sound: The fractal based approaches. J. Acoust. Soc. Am. 2002, 112, 172–177. [Google Scholar] [CrossRef]
- Wang, S.; Zeng, X. Robust underwater noise targets classification using auditory inspired time-frequencyanalysis. Appl. Acoust. 2014, 78, 68–76. [Google Scholar] [CrossRef]
- Niu, F.; Hui, J.; Zhao, A.; Cheng, Y.; Chen, Y. Application of SN-EMD in Mode Feature Extraction of Ship Radiated Noise. Math. Probl. Eng. 2018, 20, 2184612. [Google Scholar] [CrossRef]
- Li, Y.; Chen, X.; Yu, J.; Yang, X. A Fusion Frequency Feature Extraction Method for Underwater Acoustic Signal Based on Variational Mode Decomposition, Duffing Chaotic Oscillator and a Kind of Permutation Entropy. Electronics 2019, 8, 61. [Google Scholar] [CrossRef]
- Yeh, J.; Shieh, J.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Rostaghi, M.; Azami, H. Dispersion Entropy: A Measure for Time Series Analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Li, Y.; Gao, X.; Wang, L. Reverse Dispersion Entropy: A New Complexity Measure for Sensor Signal. Sensors 2019, 19, 5203. [Google Scholar] [CrossRef]
- Azami, H.; Escudero, J. Amplitude- and Fluctuation-Based Dispersion Entropy. Entropy 2018, 20, 210. [Google Scholar] [CrossRef]
- Cuesta-Frau, D. Slope Entropy: A New Time Series Complexity Estimator Based on Both Symbolic Patterns and Amplitude Information. Entropy 2019, 21, 1167. [Google Scholar] [CrossRef]
- Li, Y.; Gao, P.; Tang, B.; Yi, Y.; Zhang, J. Double Feature Extraction Method of Ship-Radiated Noise Signal Based on Slope Entropy and Permutation Entropy. Entropy 2022, 24, 22. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Z. Feature Extraction of Ship-Radiated Noise Based on Intrinsic Time-Scale Decomposition and a Statistical Complexity Measure. Entropy 2019, 21, 1079. [Google Scholar] [CrossRef]
- Li, W.; Shen, X.; Li, Y. A Comparative Study of Multiscale Sample Entropy and Hierarchical Entropy and Its Application in Feature Extraction for Ship-Radiated Noise. Entropy 2019, 21, 793. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–44. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Li, Y.; Chen, Z.; Chen, X. Feature Extraction of Ship-Radiated Noise Based on Permutation Entropy of the Intrinsic Mode Function with the Highest Energy. Entropy 2016, 18, 393. [Google Scholar] [CrossRef]
- Li, Y.; Chen, X.; Yu, J.; Yang, X.; Yang, H. The Data-Driven Optimization Method and Its Application in Feature Extraction of Ship-Radiated Noise with Sample Entropy. Energies 2019, 12, 359. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Y. A study on complexity feature extraction of ship radiated signals based on a multi-scale permutation entropy method. J. Vib. Shock 2019, 38, 225–230. [Google Scholar]
- Yang, H.; Zhao, K.; Li, G. A New Ship-Radiated Noise Feature Extraction Technique Based on Variational Mode Decomposition and Fluctuation-Based Dispersion Entropy. Entropy 2019, 21, 235. [Google Scholar] [CrossRef]
- Li, Y.; Chen, X.; Yu, J. A Hybrid Energy Feature Extraction Approach for Ship-Radiated Noise Based on CEEMDAN Combined with Energy Difference and Energy Entropy. Processes 2019, 7, 69. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, Y.; Deng, W. Fault Diagnosis for Rolling Bearings Using Optimized Variational Mode Decomposition and Resonance Demodulation. Entropy 2020, 22, 739. [Google Scholar] [CrossRef]
- Jing, Z.; He, D.; Wei, Z. Intelligent fault diagnosis of train axle box bearing based on parameter optimization VMD and improved DBN. Eng. Appl. Artif. Intell. 2022, 110, 104713. [Google Scholar]
- Li, Y.; Mu, L.; Gao, P. Particle Swarm Optimization Fractional Slope Entropy: A New Time Series Complexity Indicator for Bearing Fault Diagnosis. Fractal Fract. 2022, 6, 345. [Google Scholar] [CrossRef]
- Li, Y.; Tang, B.; Yi, Y. A novel complexity-based mode feature representation for feature extraction of ship-radiated noise using VMD and slope entropy. Appl. Acoust. 2022, 196, 108899. [Google Scholar] [CrossRef]
- Keller, J.M.; Gray, M.R.; Givens, J.A. A fuzzy K-nearest neighbor algorithm. IEEE Trans. Syst. Man Cybern. 1985, SMC-15, 580–585. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Average Recognition Rate (%) | |||||
|---|---|---|---|---|---|---|
| IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | |
| EMD-Single-Slopen | 60.3 | 59.8 | 64 | 58.1 | 43 | 29.6 |
| EEMD-Single-Slopen | 50 | 48.6 | 50.8 | 41.1 | 42.5 | 25 |
| CEEMDAN-Single-Slopen | 47.3 | 51.3 | 90.5 | 68.3 | 48.5 | 37.5 |
| Method | Choose the IMFs | Average Recognition Rate (%) |
|---|---|---|
| EMD-Dual-Slopen | IMF3, IMF4 | 85.5 |
| EEMD-Dual-Slopen | IMF1, IMF5 | 68.3 |
| CEEMDAN-Dual-Slopen | IMF3, IMF5 | 97.6 |
| Entropy | Average Recognition Rate (%) | |||||
|---|---|---|---|---|---|---|
| IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | |
| Slopen | 47.3 | 51.3 | 90.5 | 68.3 | 48.5 | 37.5 |
| DE | 70.3 | 89.5 | 66.5 | 47 | 55 | 51 |
| RDE | 72 | 85.3 | 64.6 | 49.6 | 52.1 | 50.1 |
| FDE | 76 | 90.3 | 52.1 | 52.8 | 58.8 | 51.1 |
| Entropy | Choose the IMFs | Average Recognition Rate (%) |
|---|---|---|
| Slopen | IMF3, IMF5 | 97.6 |
| DE | IMF2, IMF6 | 95.6 |
| RDE | IMF1, IMF2 | 92.5 |
| FDE | IMF2, IMF5 | 94.8 |
| Subject | Feature | Average Recognition Rate (%) |
|---|---|---|
| IMFs of S-NSs | Slopen(3) | 90.5 |
| S-NSs | Slopen | 64.6 |
| S-NSs | DE | 74.3 |
| S-NSs | RDE | 76.1 |
| S-NSs | FDE | 78.0 |
| Subject | Features | Average Recognition Rate (%) |
|---|---|---|
| IMFs | Slopen(3) and Slopen(5) | 97.6 |
| Signals | Slopen and DE | 95.6 |
| Signals | Slopen and RDE | 96.3 |
| Signals | Slopen and FDE | 95.3 |
| Signals | DE and RDE | 79.5 |
| Signals | DE and FDE | 94.5 |
| Signals | RDE and FDE | 92.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Tang, B.; Jiao, S. Optimized Ship-Radiated Noise Feature Extraction Approaches Based on CEEMDAN and Slope Entropy. Entropy 2022, 24, 1265. https://doi.org/10.3390/e24091265
Li Y, Tang B, Jiao S. Optimized Ship-Radiated Noise Feature Extraction Approaches Based on CEEMDAN and Slope Entropy. Entropy. 2022; 24(9):1265. https://doi.org/10.3390/e24091265
Chicago/Turabian StyleLi, Yuxing, Bingzhao Tang, and Shangbin Jiao. 2022. "Optimized Ship-Radiated Noise Feature Extraction Approaches Based on CEEMDAN and Slope Entropy" Entropy 24, no. 9: 1265. https://doi.org/10.3390/e24091265