1. Introduction
In today’s age of diversified use of radio waves [
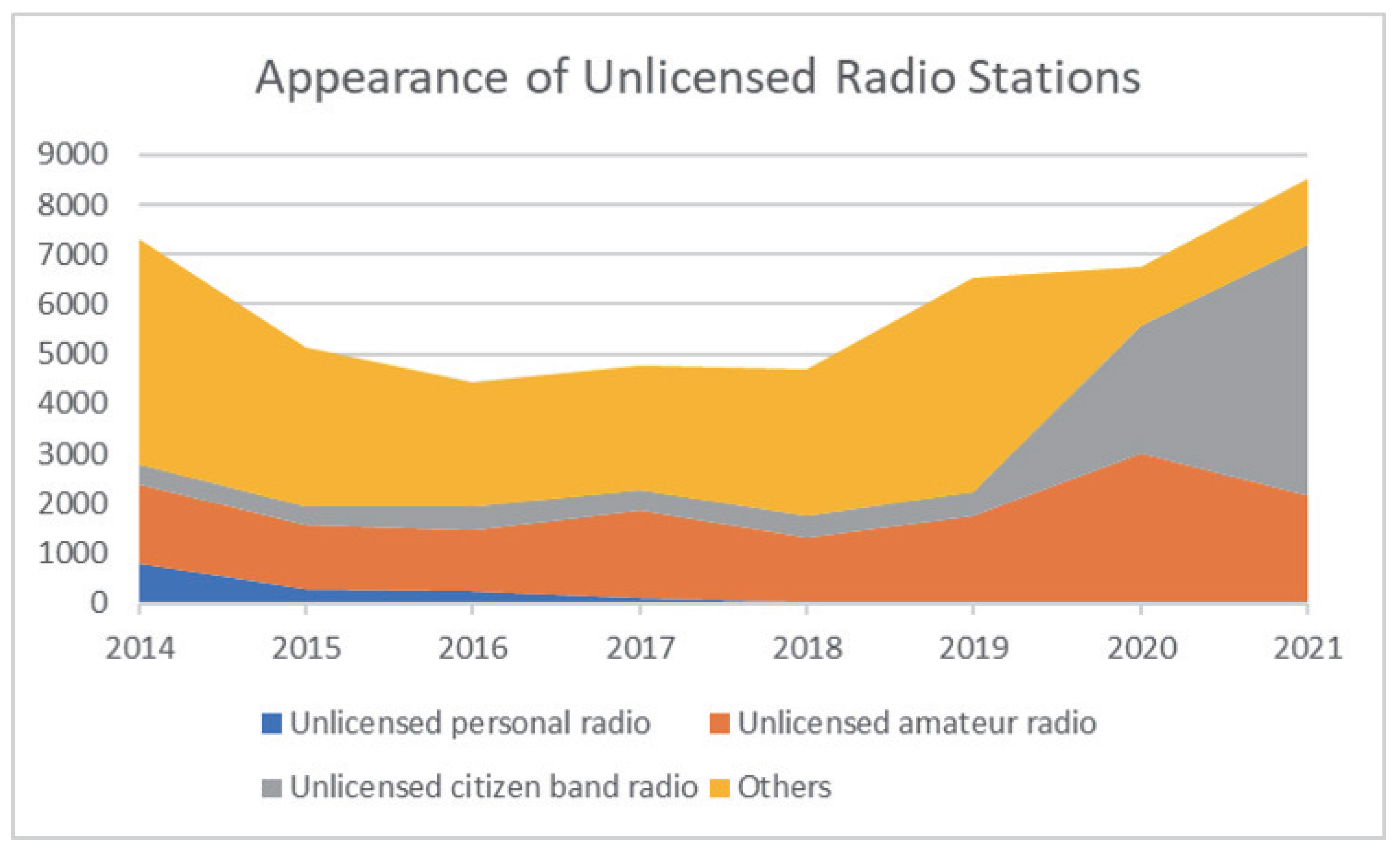
1], illegal radio waves that cause interference in wireless communication systems have become a social issue. Illegal radios (or private radios) consist of radio emitters operating without a proper license issued by authorities. The term may also refer to radios that have obtained a license but operate using frequencies outside the ranges specified by their license or transmit using powers much larger than regulations. Statistics of illegal radios in Japan from 2014 until 2021 are available on the MIC website [
2], as shown in
Figure 1. From the figure, the number of appearances of illegal radios has been gradually increasing in recent years. A large percentage of illegal radios consists of unlicensed citizen band radios, followed by unlicensed amateur radios.
Cases have been reported in which the use of radio waves violating the power strength and frequencies regulated by national laws caused interferences to important lifelines such as police, fire, disaster prevention, and aviation radios, as well as television and cellular systems. Also, the occurrence of fires had been reported due to malfunctions of electronic equipment. For example, in June 2015, there were reports of interference to a broadcasting service in Tokyo. The interference source was found to be a wireless transceiver imported from overseas to communicate between shops in a shopping street, and the transceiver was not licensed for use in Japan. In March 2015 in the Tochigi prefecture, an amateur radio station was set up on a dump truck without an amateur radio license. The Japanese Ministry of Internal Affairs and Communications (MIC) has developed and utilized a radio wave monitoring system called DEtect Unlicensed RAdio Stations (DEURAS) to crack down on illegal base stations, but in recent years, with the diversification of radio wave usage, there have been many different types of illegal base stations [
2] that prevent the effectiveness of DEURAS.
One of the methods used to estimate the location of radio wave sources for radio wave monitoring is the geometric localization method using the angle of arrival (AOA) of the received signal. However, since the geometric localization method assumes an LoS condition between the sensor and the target, the localization accuracy deteriorates significantly in general environments of urban areas with the existence of many scattering objects, where sensors and the radio sources are normally in an NLoS condition [
3,
4,
5,
6]. In a geometric localization or triangulation approach, the location of the emitters is predicted as the intersection point of different estimated AOAs from the illegal source toward different received sensors. Due to the existence of multipath components in NLoS environments, AOA estimation errors finally result in a large localization error.
Therefore, a statistical localization method, i.e., fingerprint-based localization, has been attracting attention [
4]. In particular, statistical approaches, such as machine learning, are expected to enable localization even in NLoS conditions. There are several approaches to perform pattern matching or machine learning of the fingerprints. The reader can find a good survey of pattern matching techniques in [
3,
7]. The most conventional approach is calculating the distance between two fingerprints. The most commonly used distance metric is the Euclidean distance, and it was used in [
8] under the name Nearest Neighbour in Signal Space (NNSS). One may also use the Manhattan distance as a distance metric [
9]. Other deterministic methods include the
k-Nearest Neighbour (KNN), which calculates the weighted or unweighted average of
k training locations, which are closest to the target’s fingerprints under a certain distance metric. One may also obtain a large number of snapshots of the training fingerprint and utilize its distribution as a location fingerprint. This is categorized as a statistical approach. If the distribution of the measured fingerprint is known, we can use the maximum likehood (ML) approach for localization. This is the approach employed in this paper (since this paper focuses on the optimization of the UAV sensor’s flight path to improve the localization estimation, the discussion of different machine learning techniques to improve localization accuracy in an NLoS environment is out of the scope of this paper. The interested reader may refer to [
3,
4,
7] for further discussion on different machine learning techniques).
However, even with fingerprint-based localization, accuracy degradation in out-of-sight communication cannot be completely avoided, and the reliability of the system decreases in an NLoS condition when fixed sensors are deployed [
10]. In this study, a UAV is used as a sensor for fingerprint-based localization, which allows the sensor to move freely in the air and ensures LoS communication to directly receive radio waves from the target, thereby improving localization accuracy. Furthermore, employing a UAV as a sensor enables the capability of determining an optimal flight path, on which optimal UAV’s sensing points can be selected to improve localization accuracy. Compared to the conventional system of fixed ground-based sensors, our approach is more cost-efficient since only one UAV sensor is required instead of the requirement for the deployment and installation of multiple fixed ground-based sensors.
For this purpose, we propose an outdoor localization system using fingerprint-based localization and aim to realize a low-cost and high-efficiency localization system by optimizing the flight path of UAVs in this paper. The improved accuracy might depend on the selection of a suitable optimization algorithm, as explained in
Appendix A of this paper. Particularly, a free-path route optimization is further considered in this paper in constrast to our previous work in [
11], where only a restricted circular orbit was investigated. Numerical results will reveal the superiority of the free-path route optimization compared to the circular case, owing to the higher mobility freedom of the UAV sensor. Compared to our previous work in [
11], the main contributions of this work include:
The investigation of a free-path trajectory that helps to further improve estimation accuracy;
Detailed explanations of each process of our proposed system;
Comparison of different optimization solving techniques;
Discussions about future directions/applications of the UAV-based localization system proposed in this paper.
This paper is organized as follows.
Section 2 describes conventional localization methods and the proposed fingerprint-based mechanism using UAVs. The simulation setup is explained in
Section 3. Numerical results and discussions are given in
Section 4. Finally,
Section 5 concludes this paper with our future works.
Table 1 summarizes all the abbreviations used in this work.
3. Simulation System
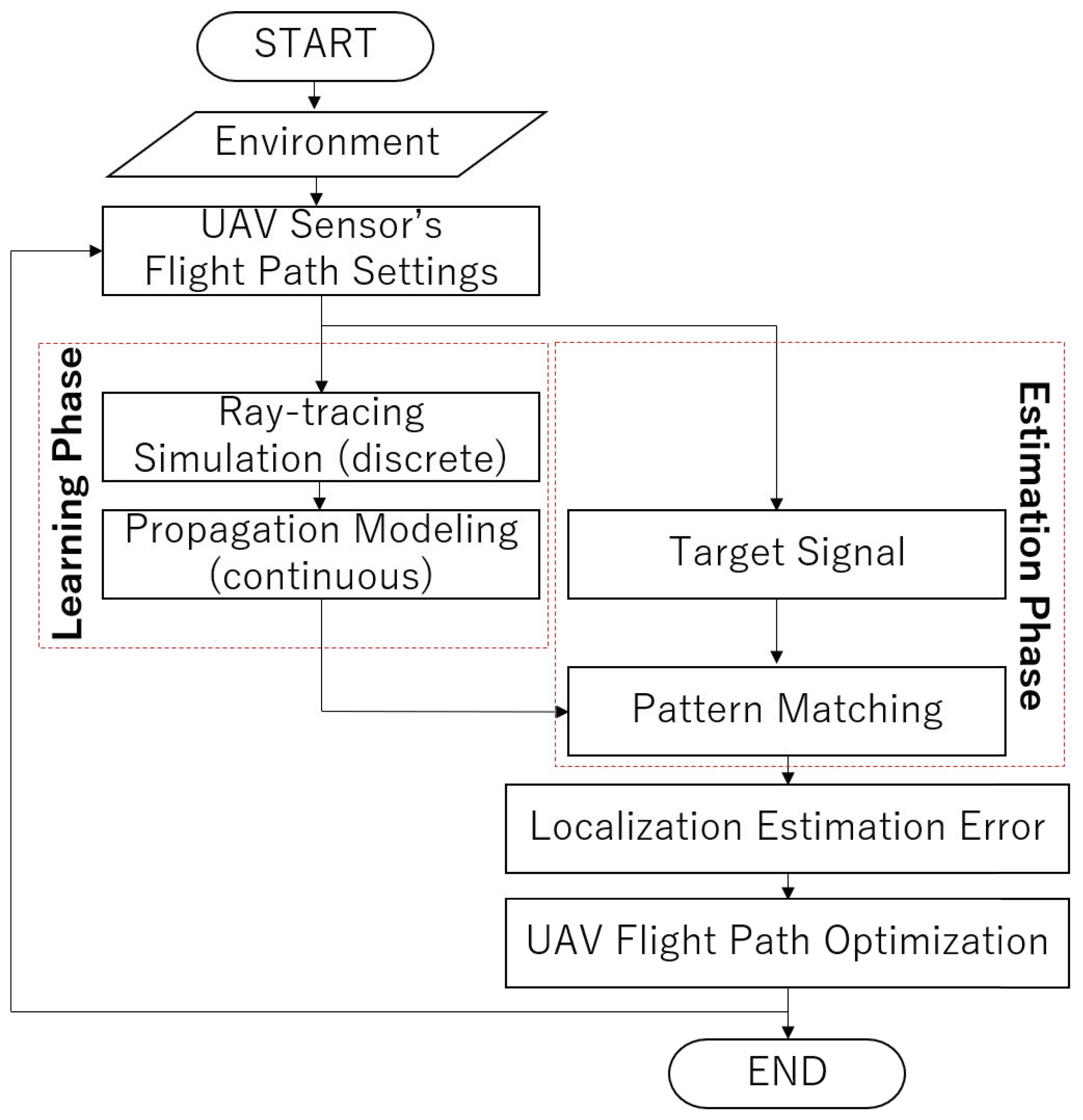
An overview of the UAV flight path optimization method proposed in this paper is shown in
Figure 4. As shown in the figure, our simulation starts with the deployment of a selected outdoor environment to be evaluated by our numerical analysis. An initial trajectory of our UAV sensor is set. Based on the position of the UAV sensor and the ground-based training points, a ray-tracing simulation is conducted to emulate the propagation channels between the discrete training points and the UAV sensor. Since the target illegal transmitter’s locations might be different from those of the discrete training points, a propagation modeling approach is applied to emulate the propagation channels between arbitrary possible target locations and the UAV sensor. In the estimation phase, a machine-learning-based pattern matching algorithm is applied to compare the RF fingerprint of the target illegal emitter against the constructed RF fingerprint database. (Indeed, the pattern matching process as shown in
Figure 4 can be classified as “supervised learning”, one of famous machine learning algorithms. In the first phase, a fingerprint database is constructed via the regression process explained in
Section 3.2. In the second phase, the pattern matching process is conducted, i.e., the observed RF signals are compared with the constructed database to estimate the location of the illegal emitter. This paper employed the ML approach shown in Equation (
3) for the estimation phase.) Based on this process, the location estimation error of a specific target location is computed. This process is repeated for all candidate locations of the target emitter to finally derive the estimation error distribution. Based on the derived distribution, our optimization algorithm is run to select another UAV flight path that helps to improve the estimation error distribution. Details on the functionality of each block will be explained as follows.
3.1. Ray-Tracing Simulation
First, as a learning phase of the fingerprinting method, the radio propagation characteristics in the simulated environment were analyzed. In this study, radio propagation simulations were conducted using the ray-tracing method. The ray-tracing method has the following characteristics [
16]:
It traces radio waves emitted from a transmitting point as rays of light and searches for a path;
It geometrically calculates paths with reflection, diffraction, and transmission;
It can take into account multipath effects caused by obstacles;
It requires much less memory and computation than the FDTD method, a well-known theoretical approach.
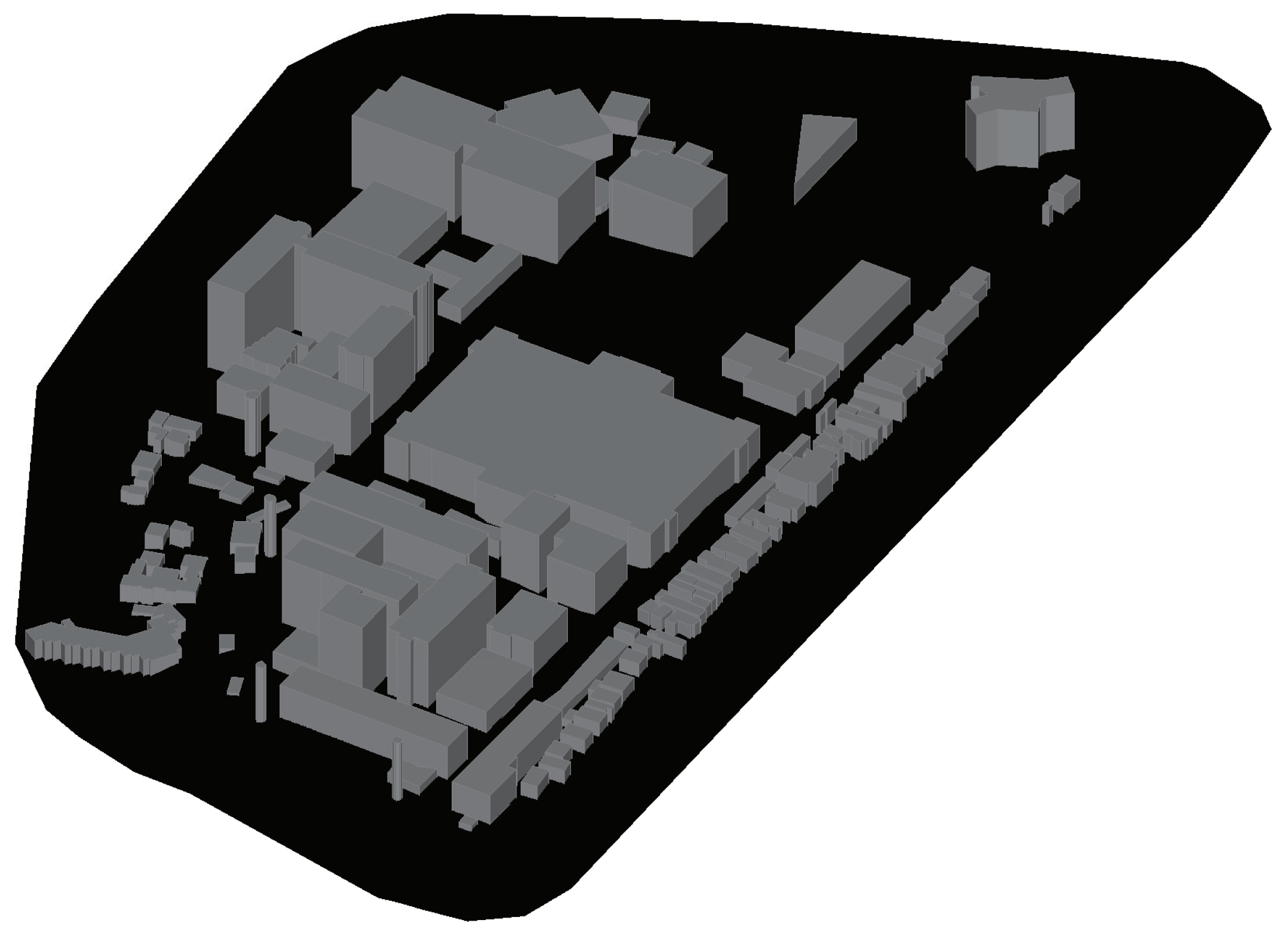
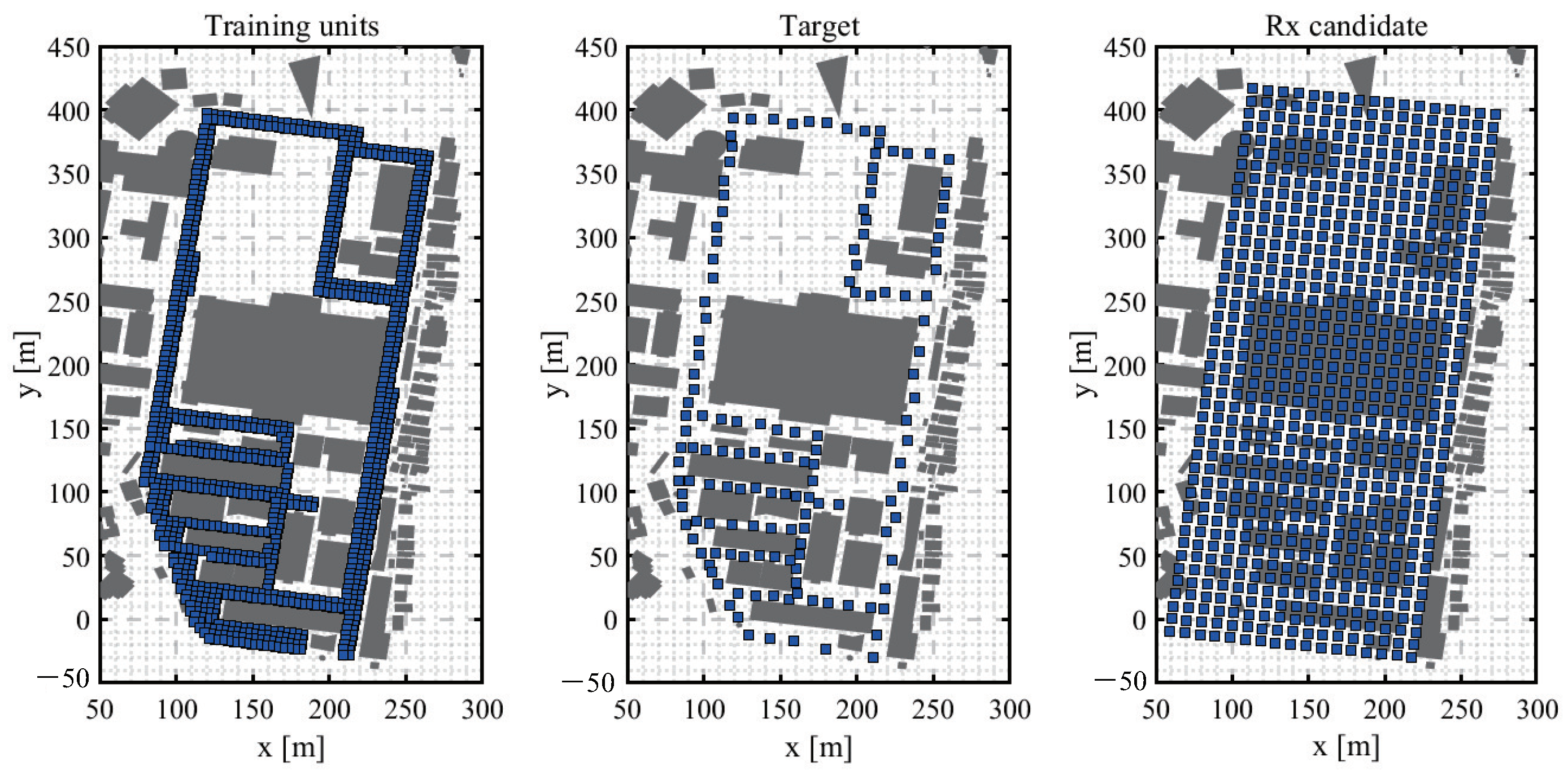
A ray-tracing simulation was performed using the radio propagation simulation software Wireless Insite. The simulation terrain model is shown in
Figure 5 and the arrangement of the transmitter and sensor candidate points is shown in
Figure 6.
An urban environment was assumed in this study, and a terrain that reproduced the Tokyo Institute of Technology Ookayama campus was used as the simulation terrain model.
Training units in the learning phase and targets in the estimation phase were placed at a height of 2 m, assuming that illegal radio transmission sources are on the road. Candidate points for UAV sensors were placed in a grid at heights of 50/75/100/125/150 m. The grid was designed to be as close as possible to the road surface. In this paper, it is assumed that the transmitter parameters in the learning and estimation phases are ideally matched (see [
17] for bandwidth and frequency interpolation methods).
The parameters are summarized in
Table 2. Note that the antennas are assumed to be omni-directional for both the transmitter and the receiver and that polarization matching is ideally achieved where vertical polarization is assumed.
3.2. Propagation Modeling
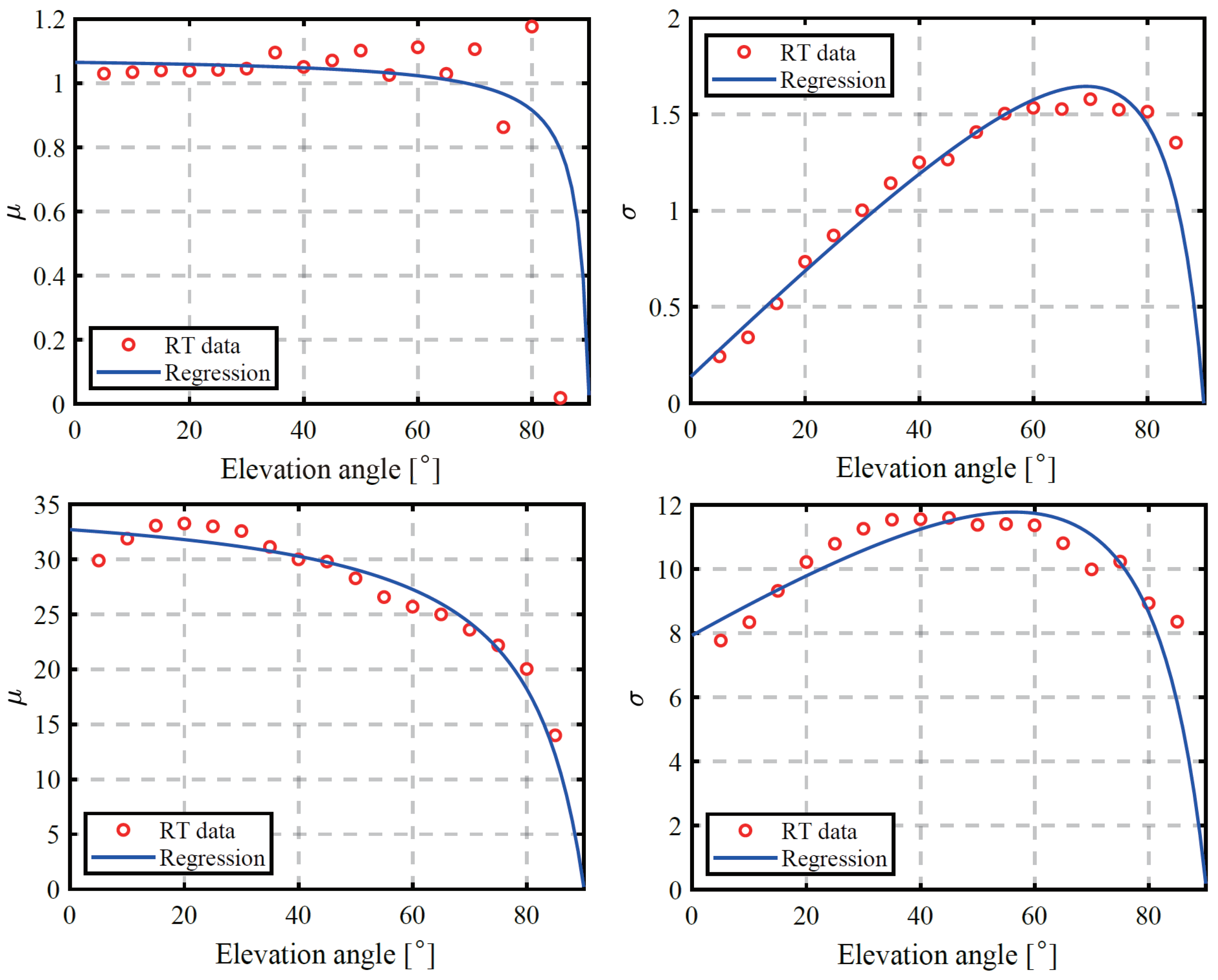
The database obtained from the ray-tracing simulation is discrete, while the actual target and UAV sensor location information is continuous. In this paper, continuous data were interpolated by applying a radio propagation model as explained below. The parameters of the model are calculated in a regressive manner from the data obtained by the ray-tracing simulation.
In this paper, we consider the following propagation loss model with the elevation angle
between Tx and Rx as a variable in LoS and NLoS environments [
18].
where
is the free space loss [
18].
Here, , where and are the heights from the ground of the receiver and the transmitter, respectively.
is the loss due to noise in the LoS environment, and
is the loss due to shadowing and noise in the NLoS environment.
and
are assumed to follow a normal distribution, respectively [
18].
where
,
and
,
are determined regressionally from the results of ray-tracing simulations. They are expressed by the following equations using experimental parameters
,
,
, and
[
14].
The results of the regression are shown in
Figure 7.
3.3. LoS Probability
In order to use the aforementioned propagation model, it is necessary to perform LoS or NLoS classification on a continuous location fingerprint database. Therefore, a probabilistic LoS/NLoS classification method is used based on the LoS/NLoS information of the discrete data obtained in advance [
14].
For a particle
i at position
, we are interested in eight discrete particle neighborhoods, i.e., 4 neighborhoods relative to the two-dimensional plane and 2 neighborhood planes relative to the elevation direction. At the
k-th neighborhood, we define a variable
that is 1 if the particle
is in an LoS condition and 0 if it is in an NLoS condition, as follows [
14]:
When the distance between a particle
i and each neighbor point
k is
, the LoS probability is calculated using the weight coefficient
and variable
with the following formula [
14].
Based on the LoS probability calculated by the above equation, the LoS or NLoS classification is stochastically determined and applied for our propagation model mentioned in
Section 3.2.
3.4. Optimization of UAV Flight Path
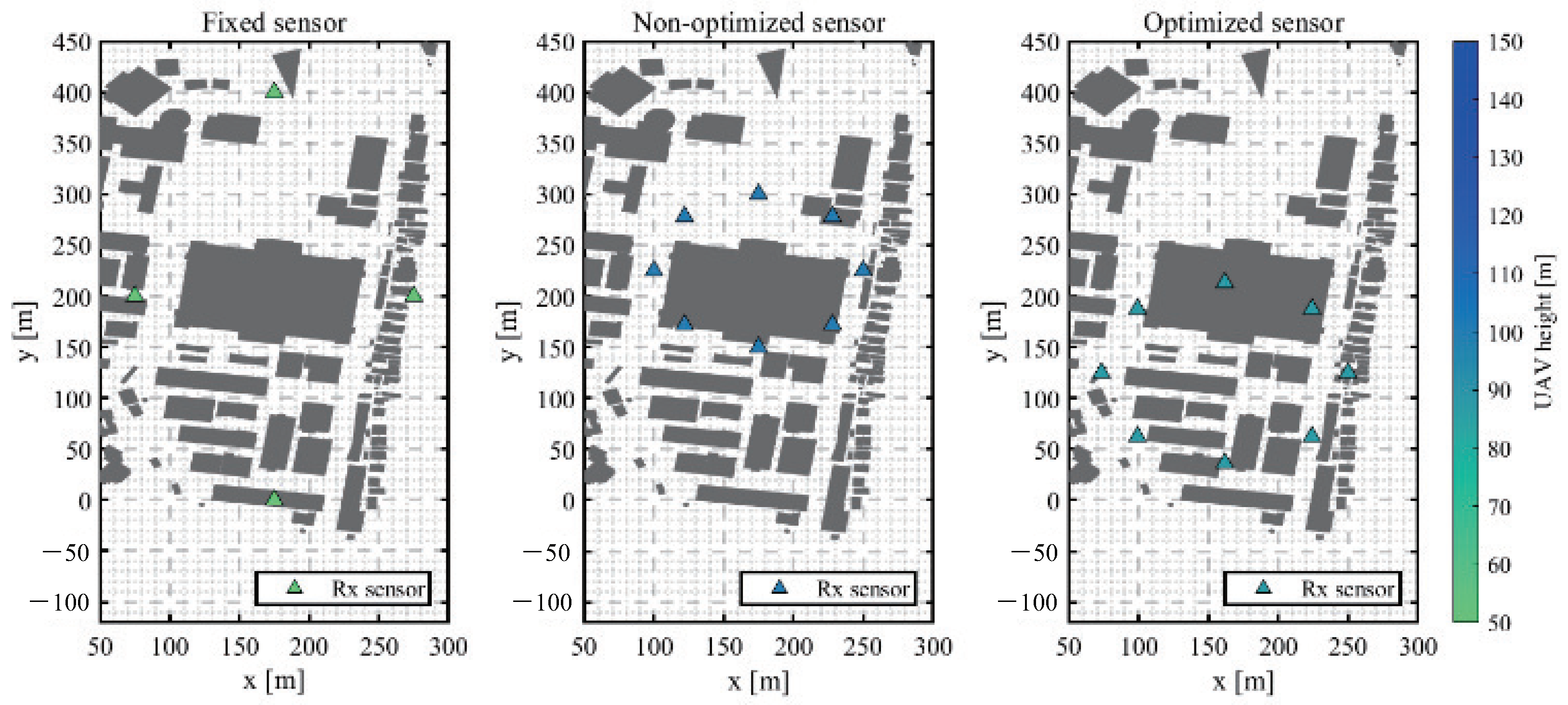
Using the created fingerprint database, localization simulations are performed to determine the flight paths of UAVs that can perform localization with higher accuracy.
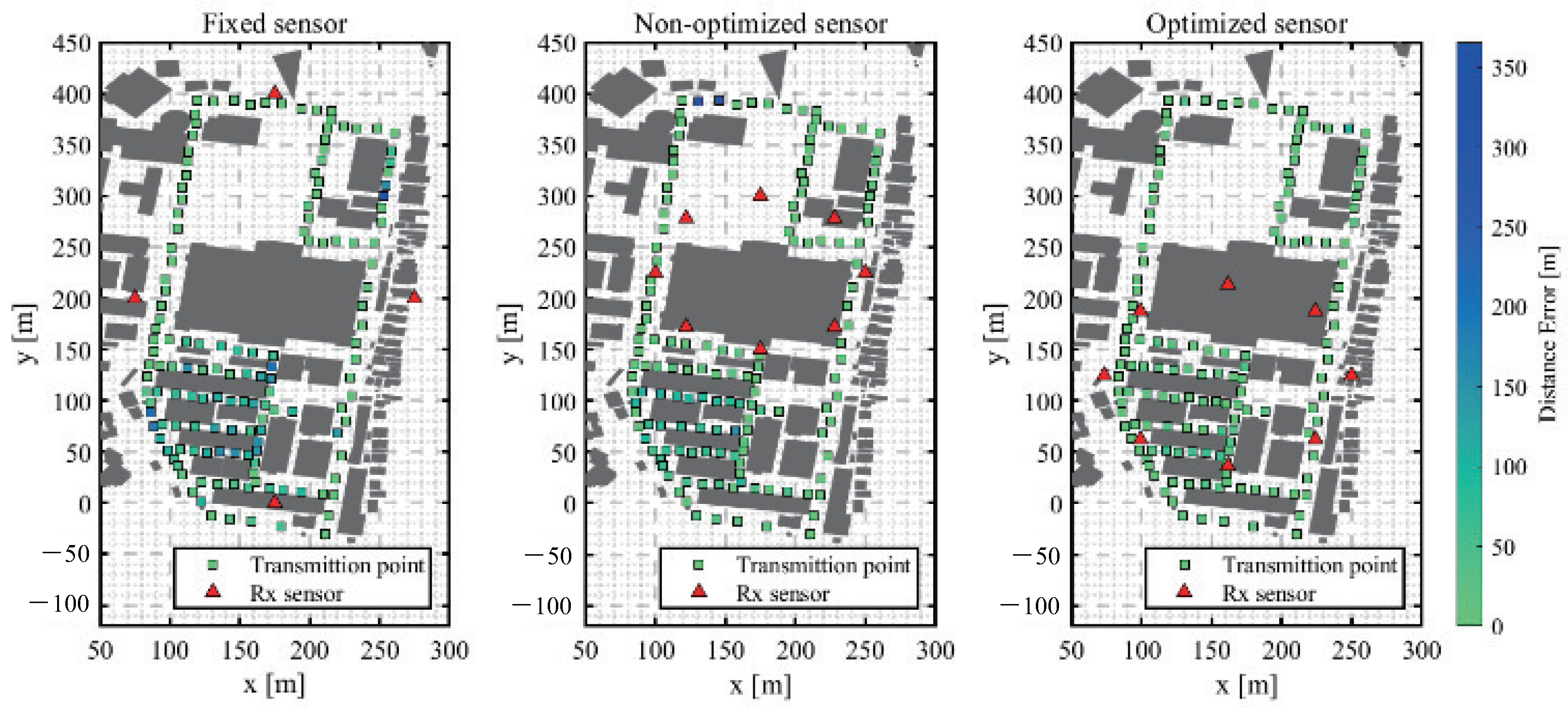
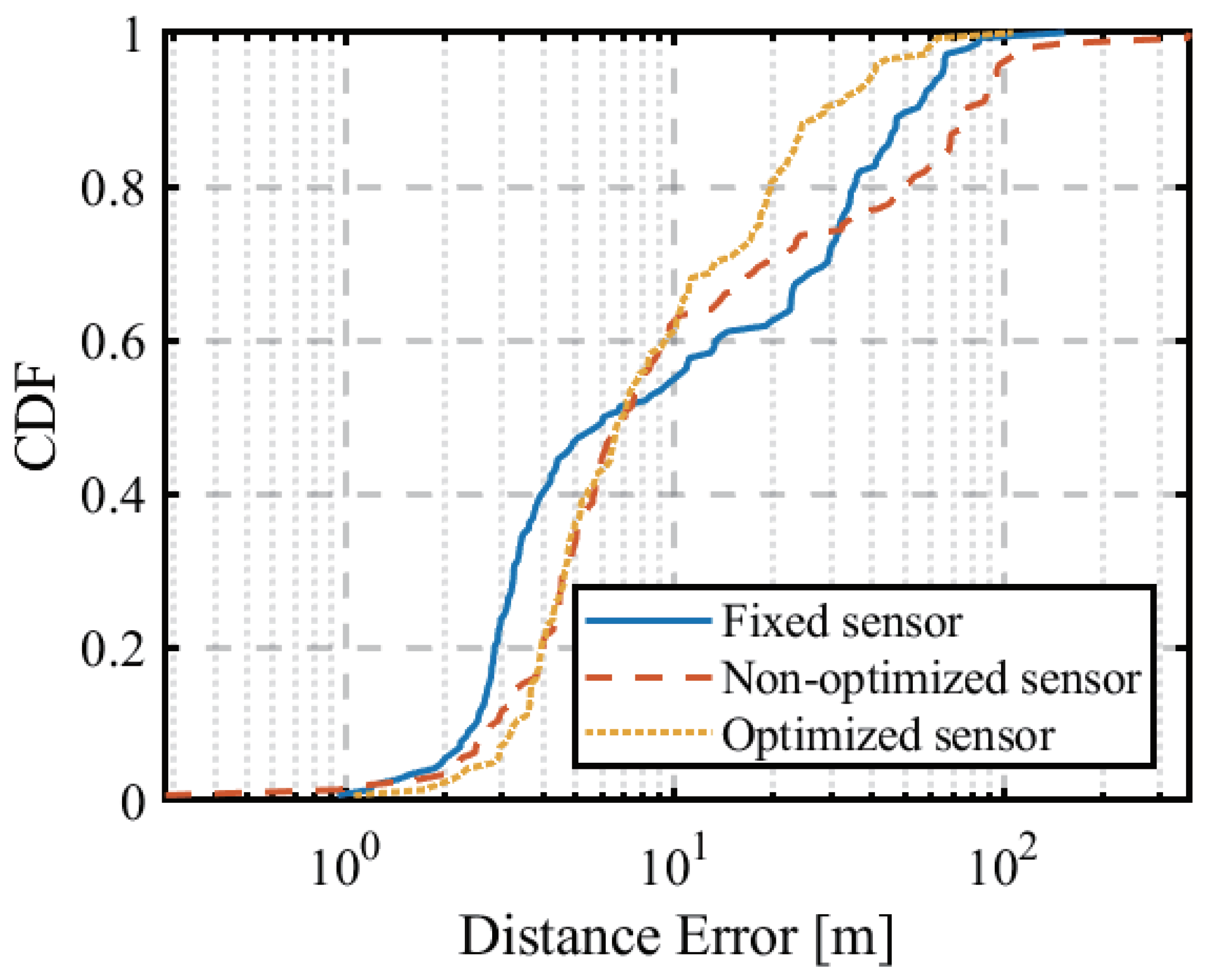
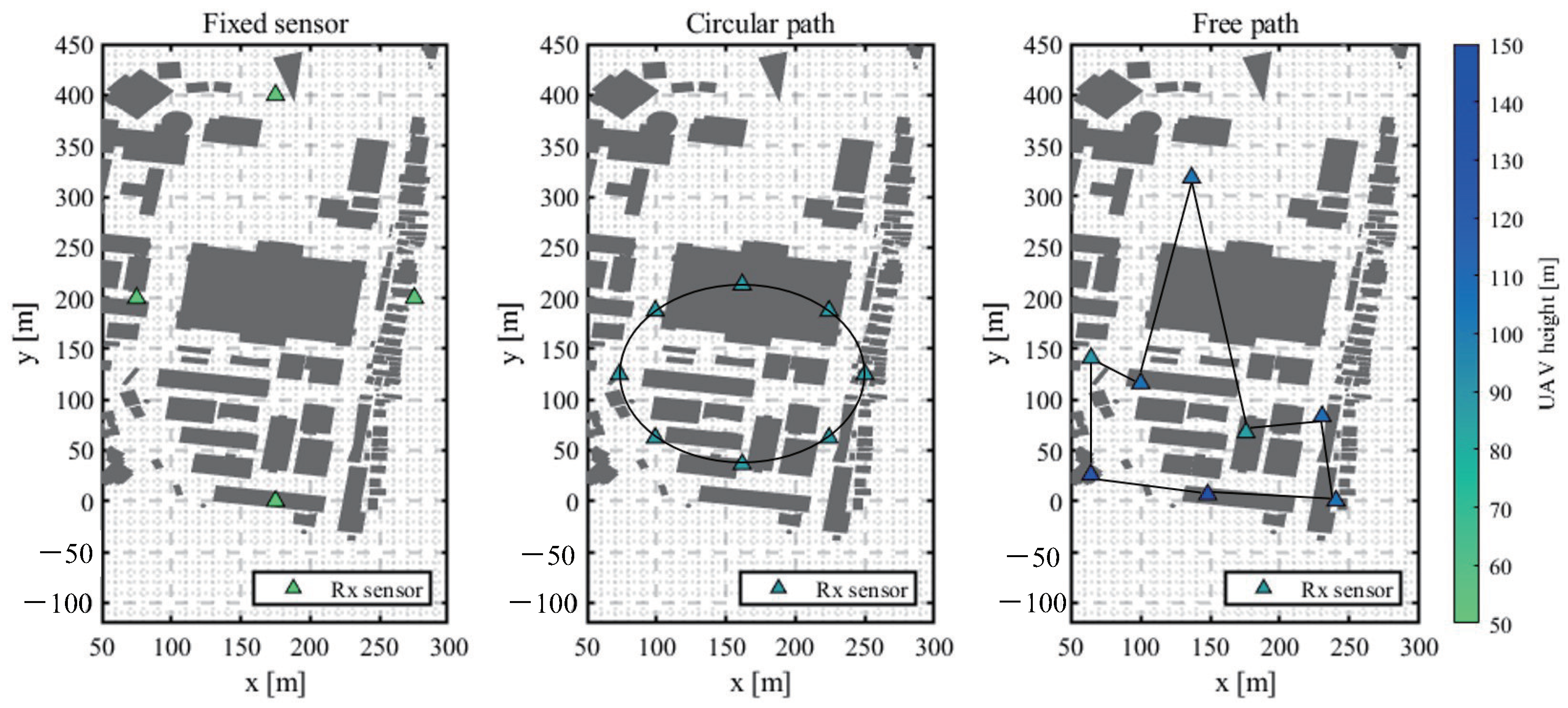
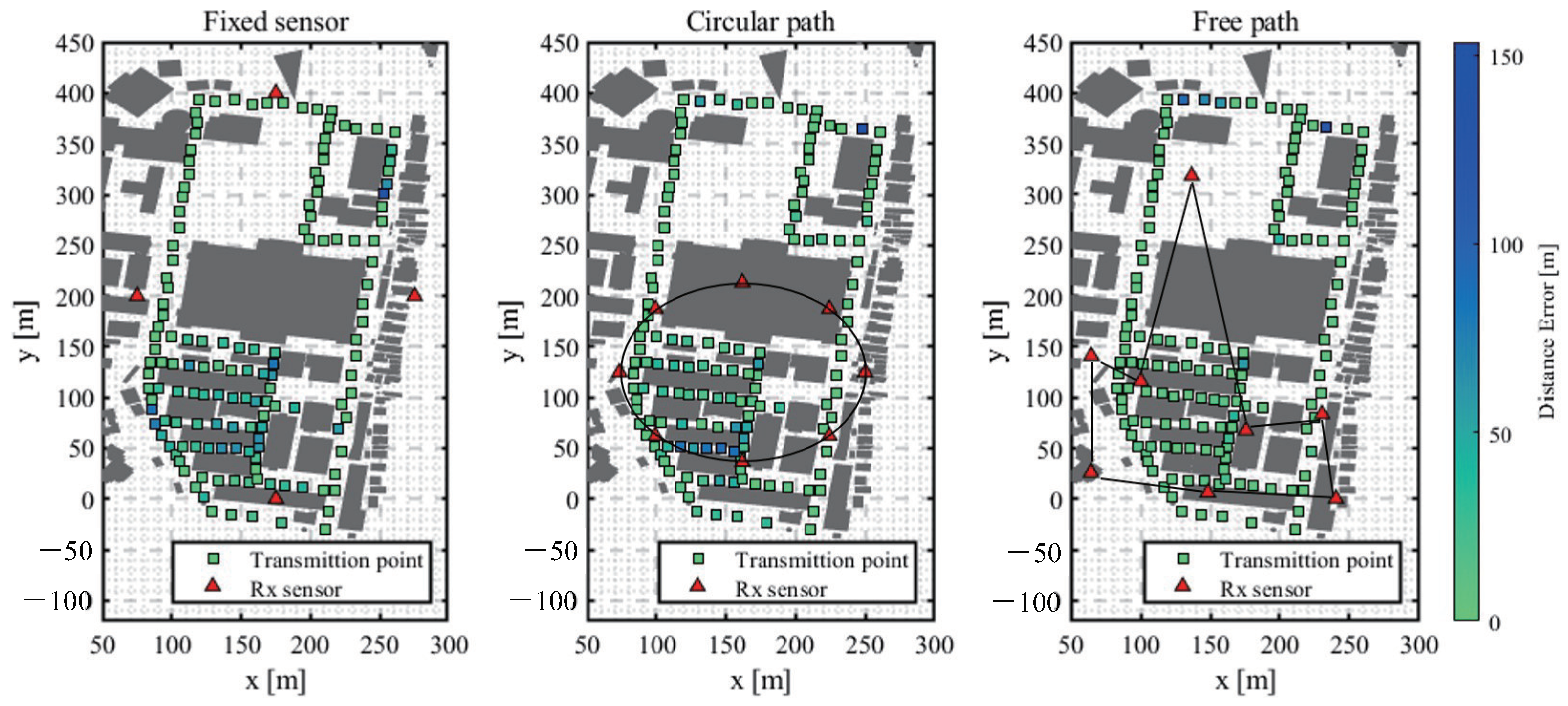
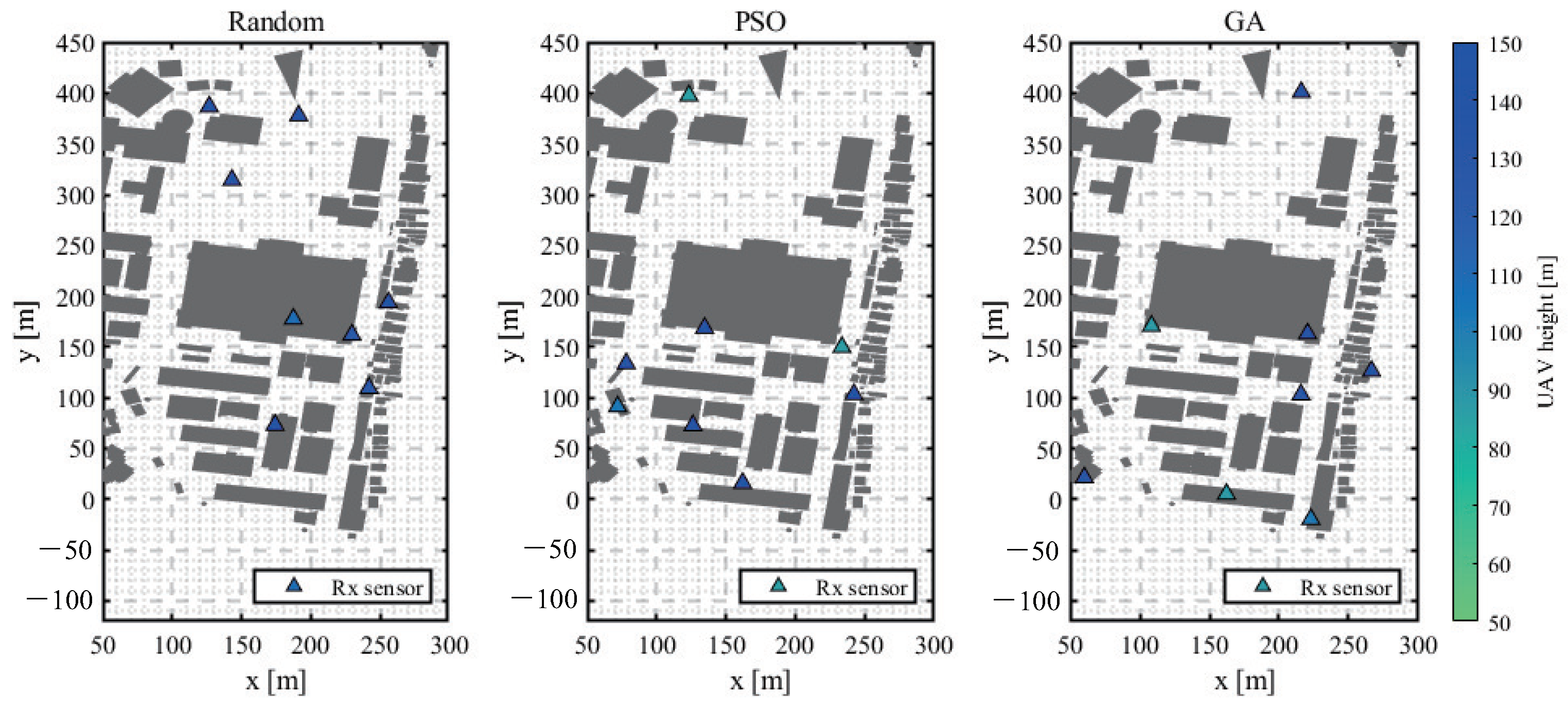
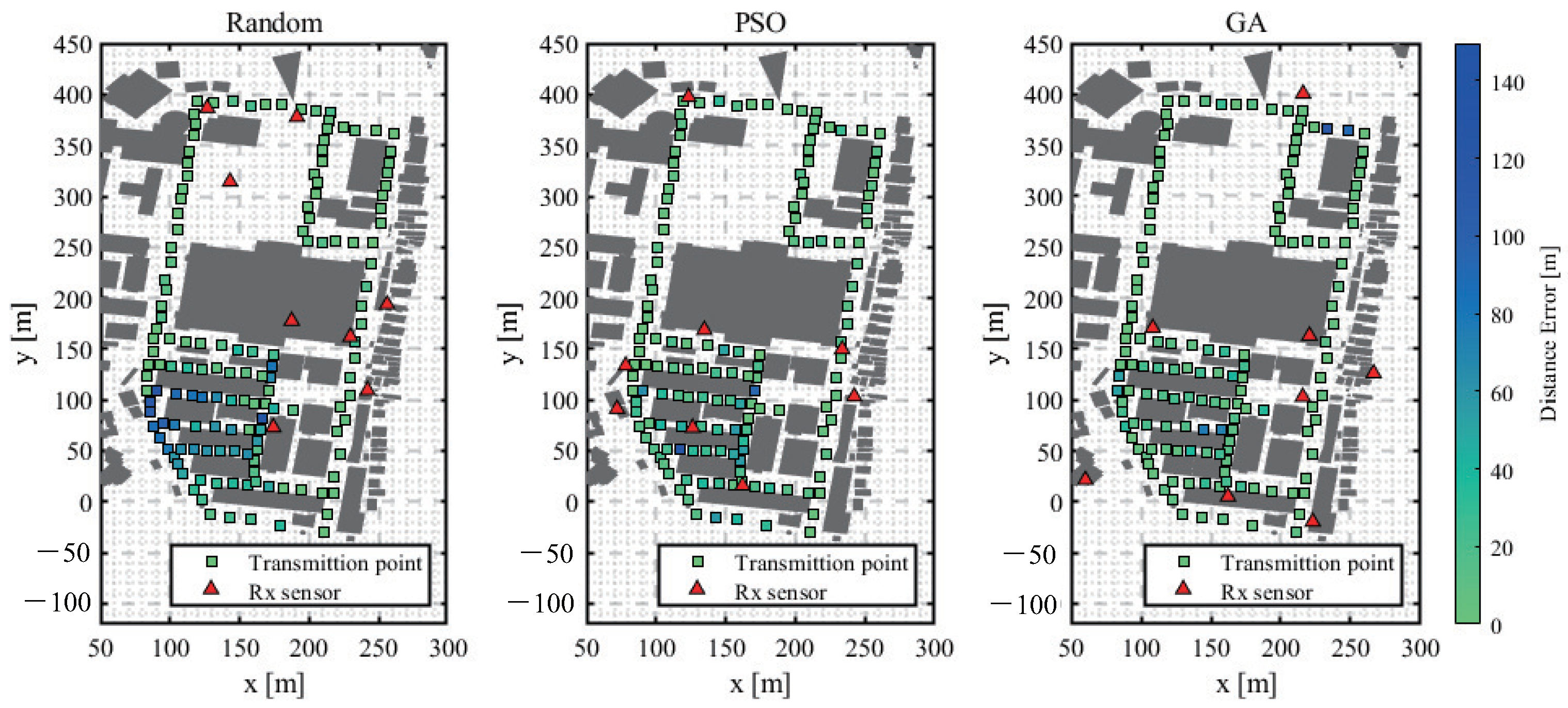
The determination of UAV flight paths can be viewed as an optimization problem that aims to minimize the 90th percentile of the cumulative distribution of localization errors as our designed objective function. In order to study the effect of using UAVs, this paper examines the case where UAV sensors are hovering in the air and the case where a single UAV moves in a circular orbit. In the former case, the position coordinates of the sensors are used as input variables, and in the latter case, the position coordinates of the center of the circular orbit and the radius of the circular orbit are used as input variables.
The RSSI used to evaluate the localization error is generated according to a probability distribution and is affected by the terrain, so the output of the objective function is a nonlinear function. In addition, the position coordinates take continuous values in space, and there are many different ways to take a path, making optimization by a full search difficult. Therefore, as explained in
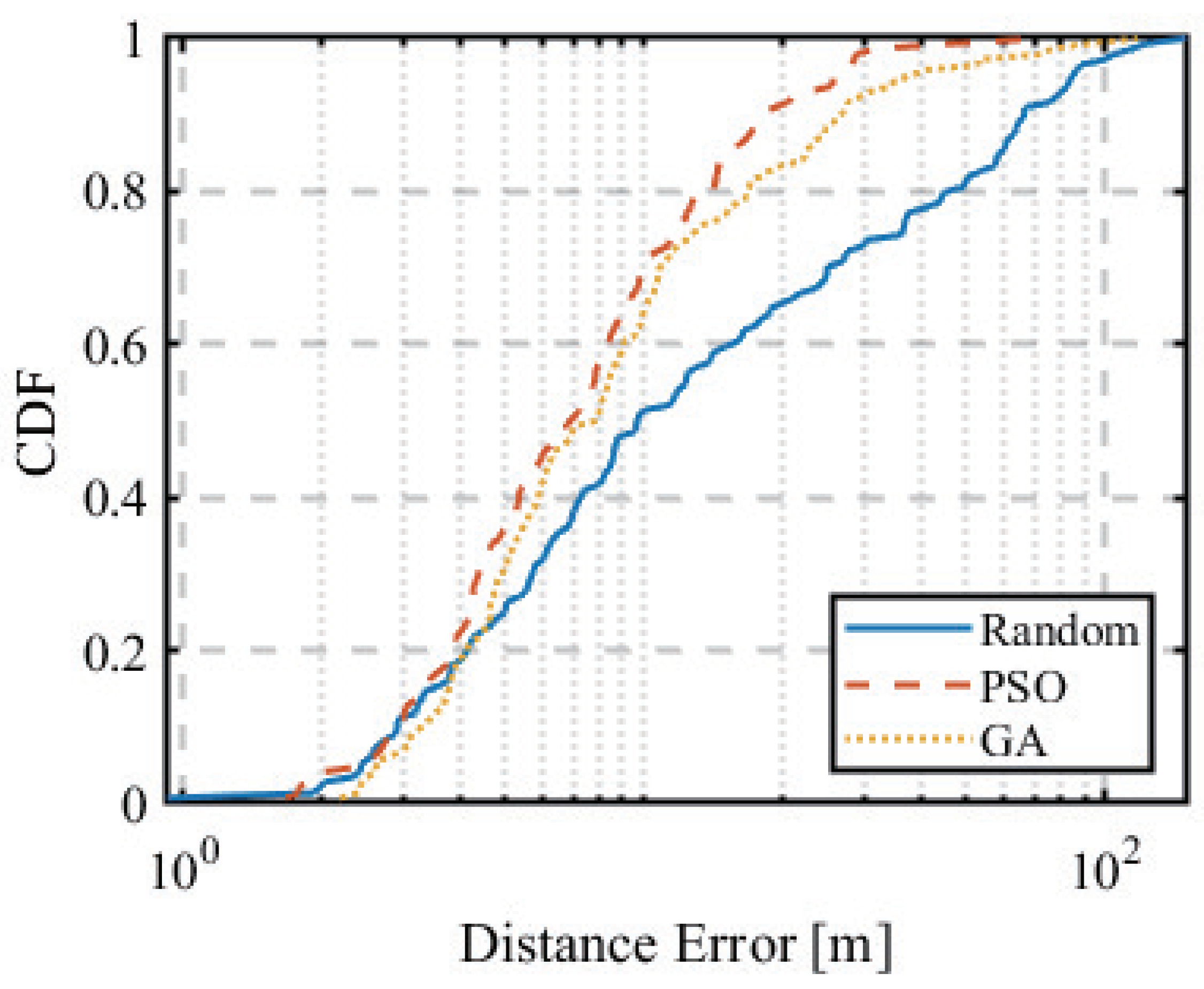
Appendix A, the particle swarm optimization (PSO) method is used as an approximate solution method that is compatible with nonlinear systems [
19,
20]. Given an objective function to be searched for, multiple particles move around in the search space in search of the optimal solution while sharing information with each other. PSO has attracted attention because of its simple algorithm, flexible parallel processing, and potential for various improvements [
21]. It also works well with nonlinear systems and is suitable for cases such as this study.
Based on the basic algorithm of PSO, we organize the optimization problem in this study. The optimization problem is to find the UAV sensor position coordinates
that minimize
with the
cumulative distribution value of localization errors as the objective function
. In this study, the CDF
value is used as an indicator of reliability as a location estimation system, but the objective function in this algorithm can be flexibly set according to the system designer’s policy [
11].
Here,
is the three-dimensional space that can be taken by the UAV sensor, and
is normalized so that each element is
. The position and velocity of the particles are updated by the following equations, respectively [
11].
where
t is the number of iterations to date,
is the personal best, and
is the value called the global best. The personal best is the particle position with the best value to date for that particle, and the global best is the best value of the personal best for all particles. The particle moves and searches for the optimal solution by iteratively updating
times, referring to the direction of the personal best and global best. The PSO parameters used in this paper are listed in
Table 3.
5. Conclusions
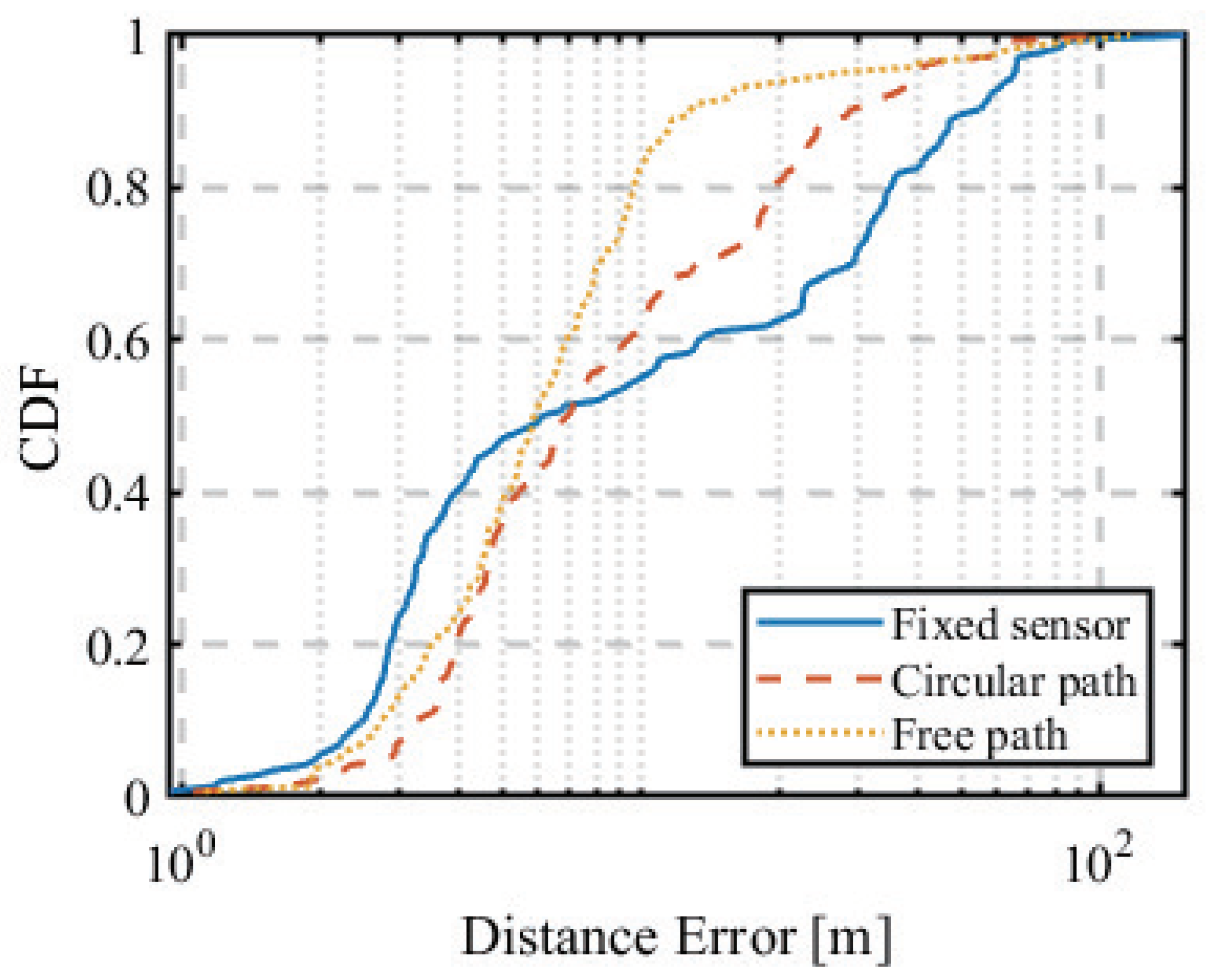
In this paper, we constructed a fingerprint database using ray-traced simulation and model-based interpolation and conducted numerical analyses to optimize the flight path of UAV sensors by evaluating the localization error via PSO for two scenarios, a circular orbit and a free-path orbit. Comparison with fixed sensors installed on the ground showed that UAV sensors can be used for low-cost and highly accurate outdoor localization. Our numerical results revealed the superiority of the proposed optimized routes, especially when the UAV can fly freely in the case of non-circular orbit. Specifically, our numerical results reveal the improved localization estimation error performance of our proposed approach. When evaluating at the 90th percentile of the error’s cumulative distribution function (CDF), the proposed approach can reach an error of 28.59 m with a circular orbit and 12.91 m with a free-path orbit, as compared to the conventional fixed sensor case whose localization estimation error is 55.02 m.
Since the presented mechanism is general and not only for illegal emitters, the extension of the proposed localization method to authorized (non-illegal) radios is straightforward [
4]. However, deploying a UAV sensor for localization purposes in practical environments is expected to face a lot of challenges, including power constraints, energy-efficient route planning, UAV self-localization issues, and security aspects [
22,
23]. Such practical considerations will be investigated in our future works. Furthermore, our future prospects also include the development of advanced optimization algorithms and the location estimation of moving radio sources to realize a system capable of tracking and policing illegal radio stations and experimental validations of the proposed technology in realistic environments.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















