
Survey for Soil Sensing with IOT and Traditional Systems

Abstract
:1. Introduction
2. Tradicitonal Soil Sensing System
2.1. Fundamentals of Soil Reflectance Spectroscopy
2.2. Soil Sample Pretreatment
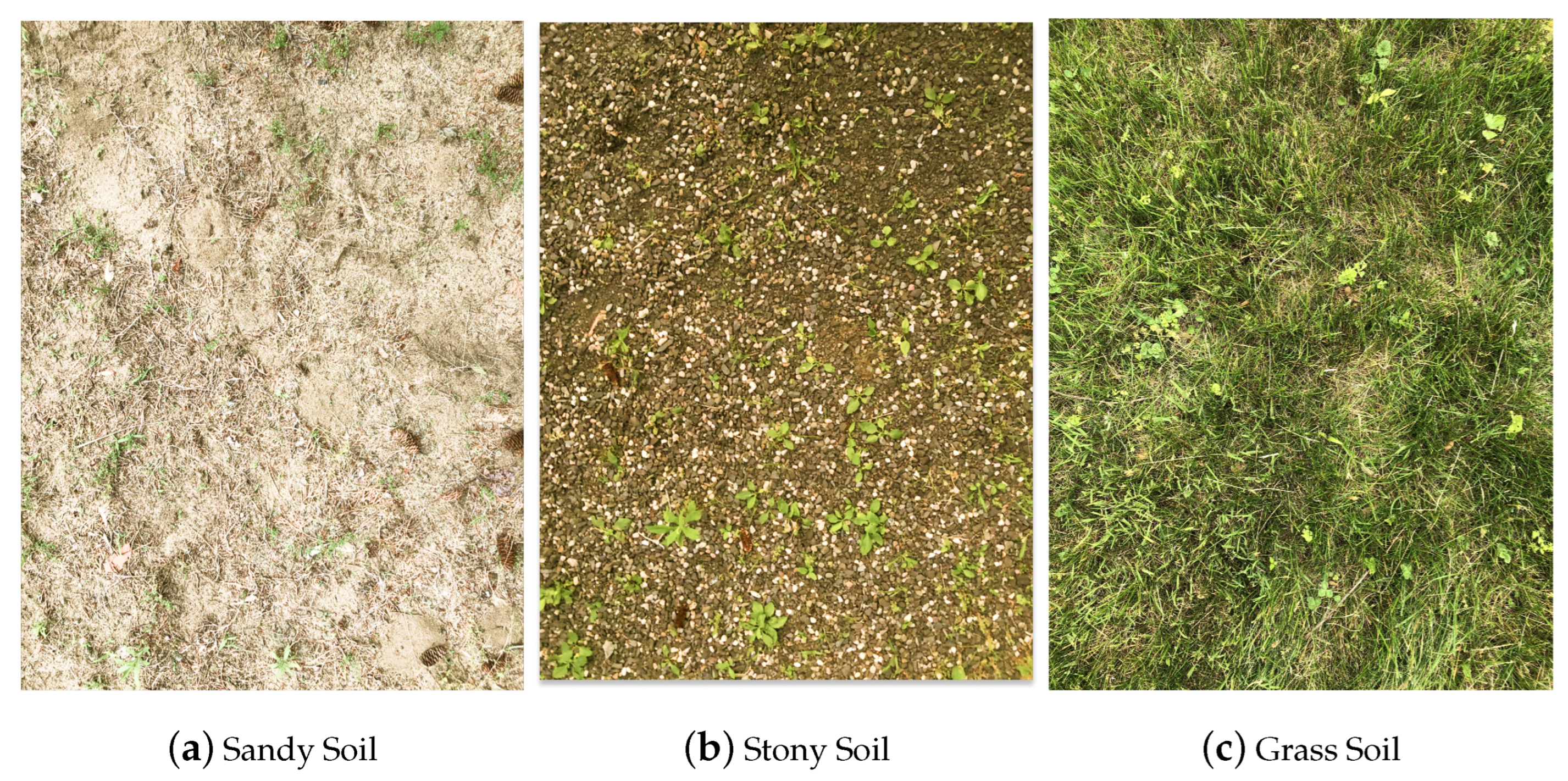
2.2.1. Preparation of Soil Samples
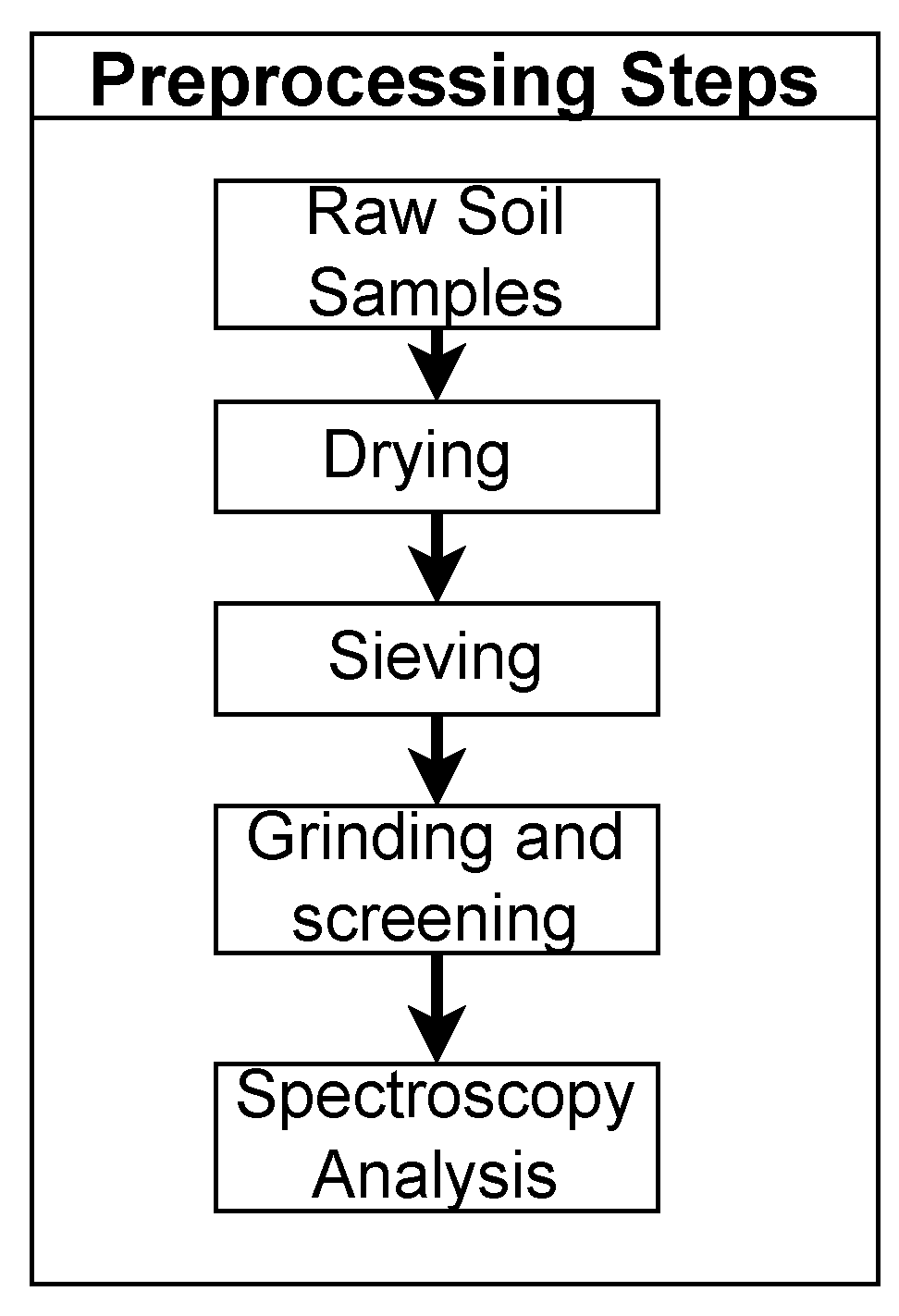
2.2.2. Pre-Processing Steps for Soil Samples
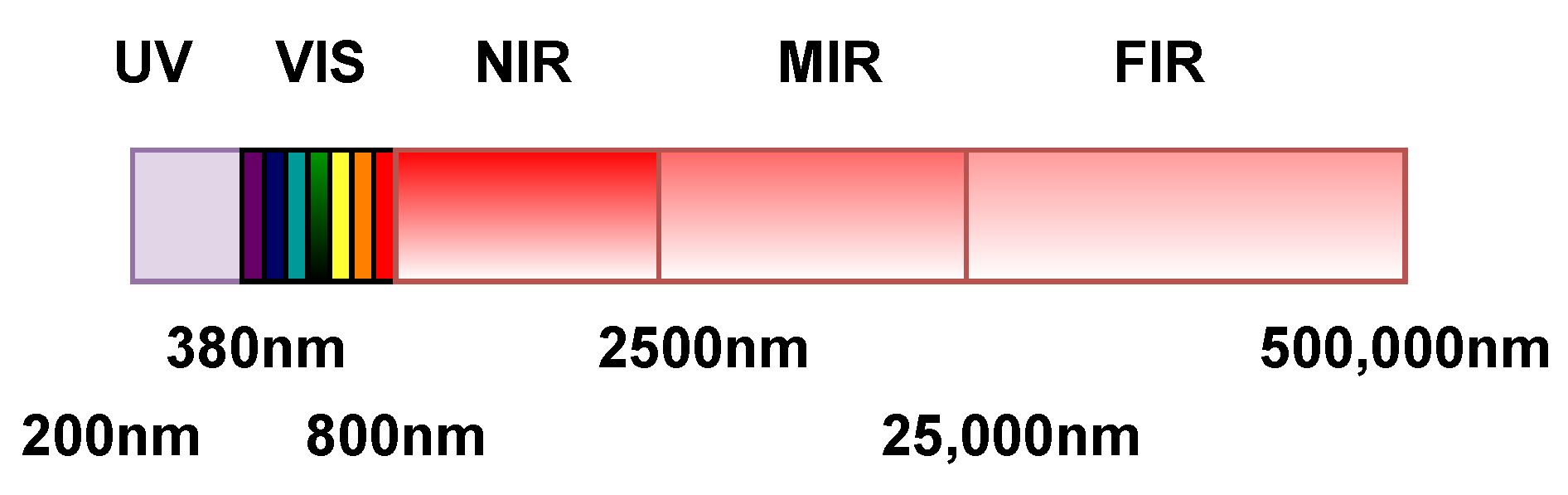
2.3. Spectral Range Selection for Reflectance Spectroscopy
2.4. Total Carbon and Total Organic Carbon
2.5. Soil Moisture
2.6. Soil Macronutrients (N, P and K)
3. RF-Based Soil Sensing Systems in Internet of Things (IoT)
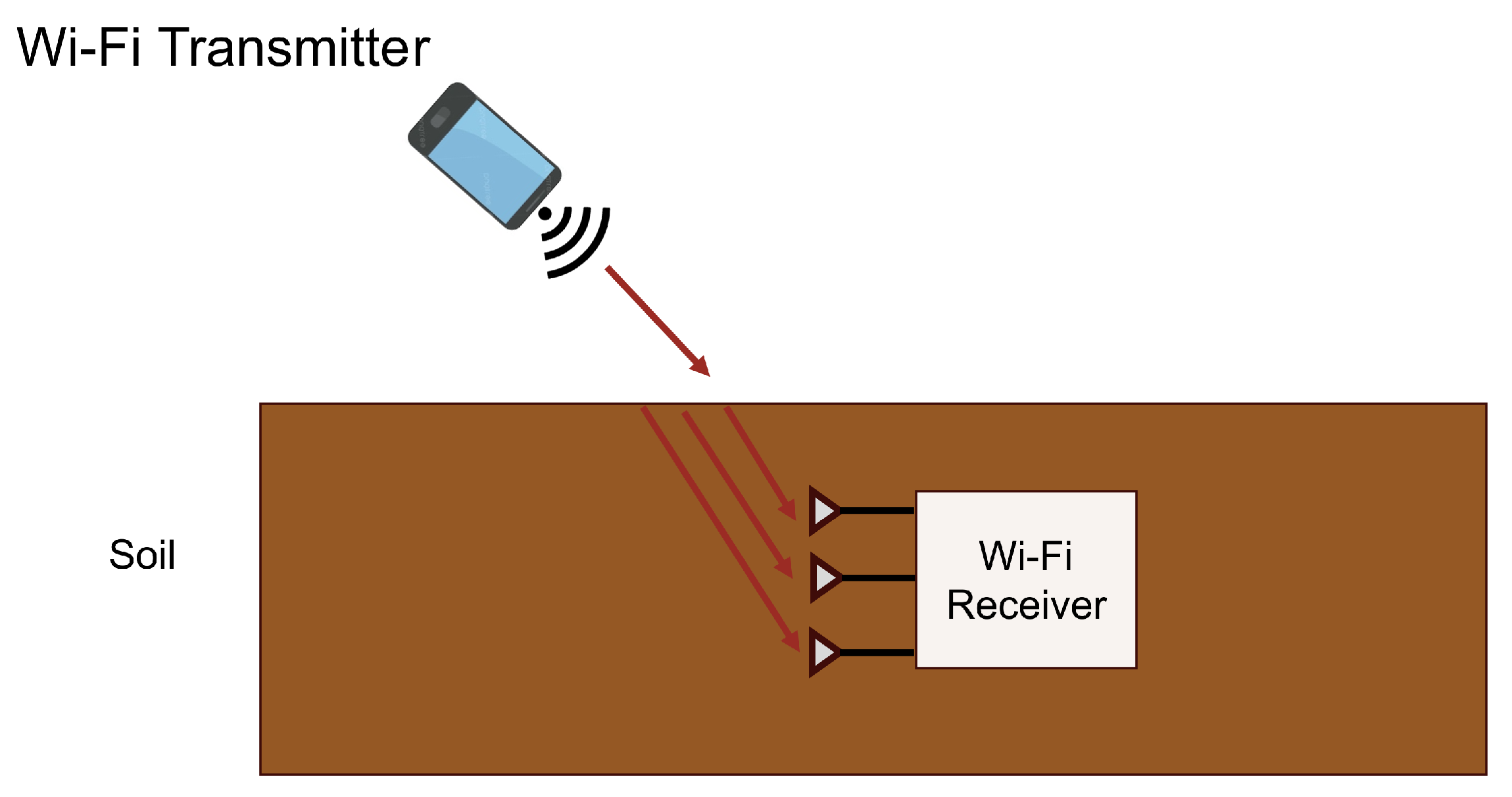
3.1. Wi-Fi Based Soil Sensing Systems
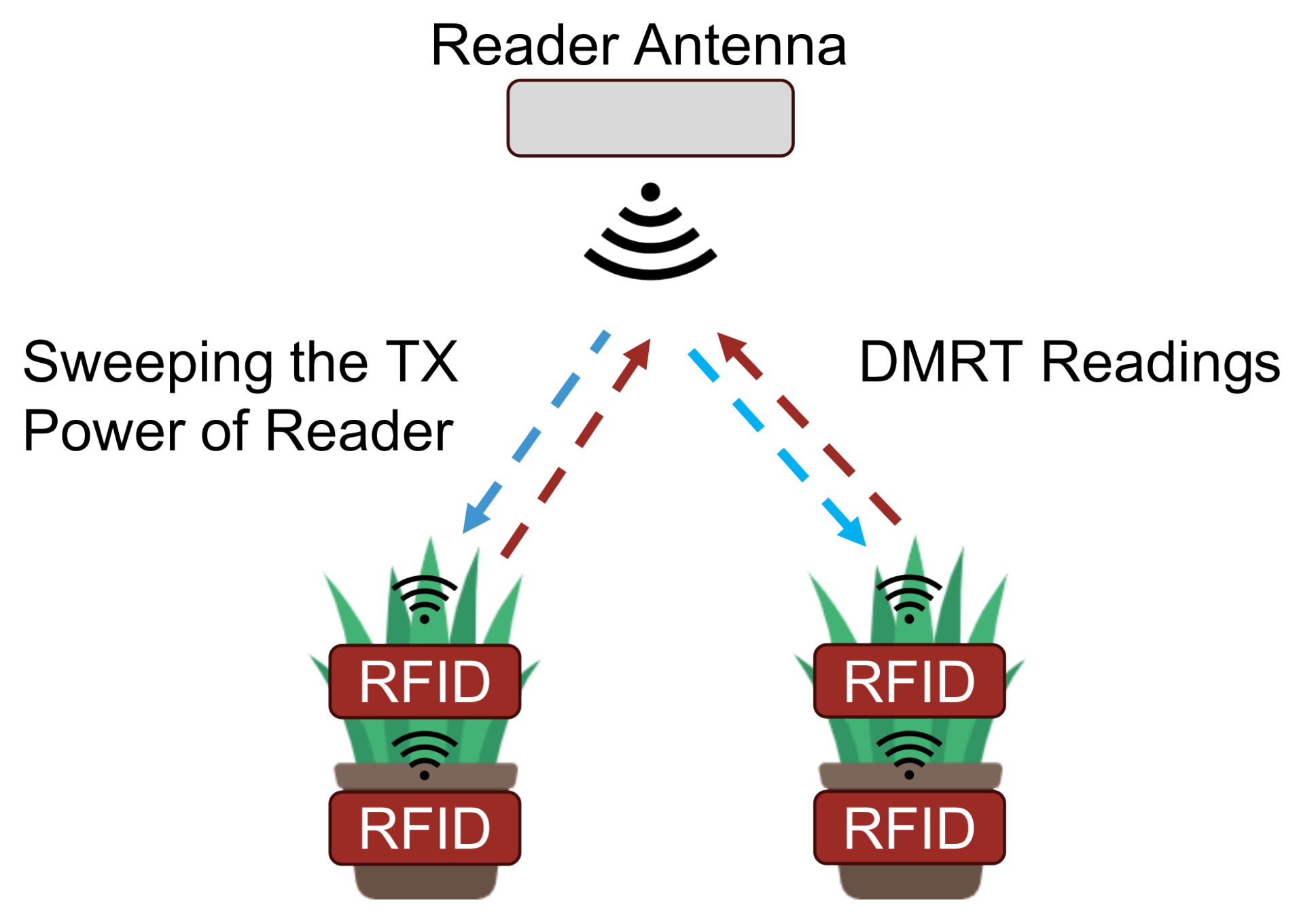
3.2. RFID-Based Soil Sensing Systems
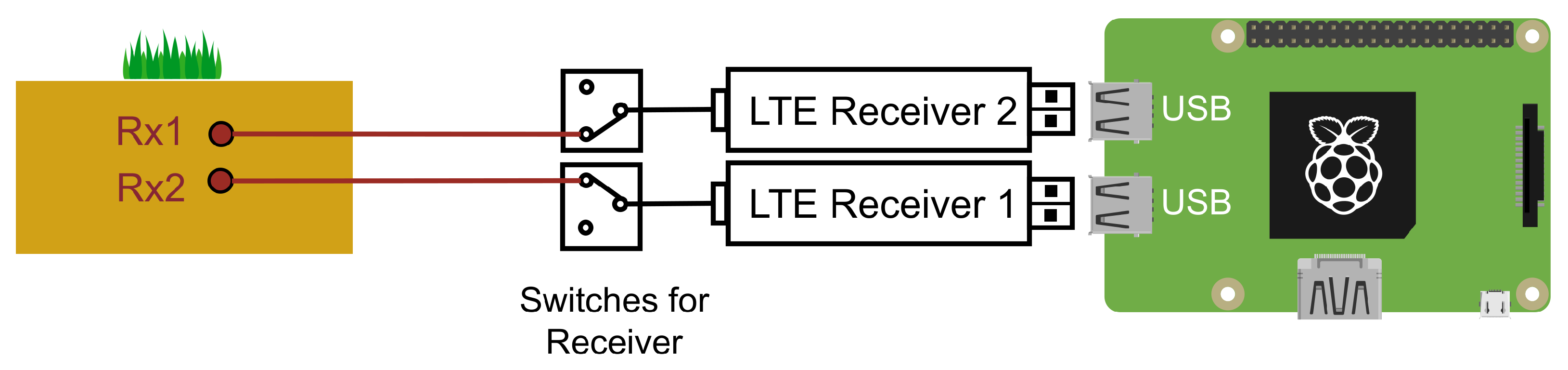
3.3. LTE-Based Soil Sensing Systems
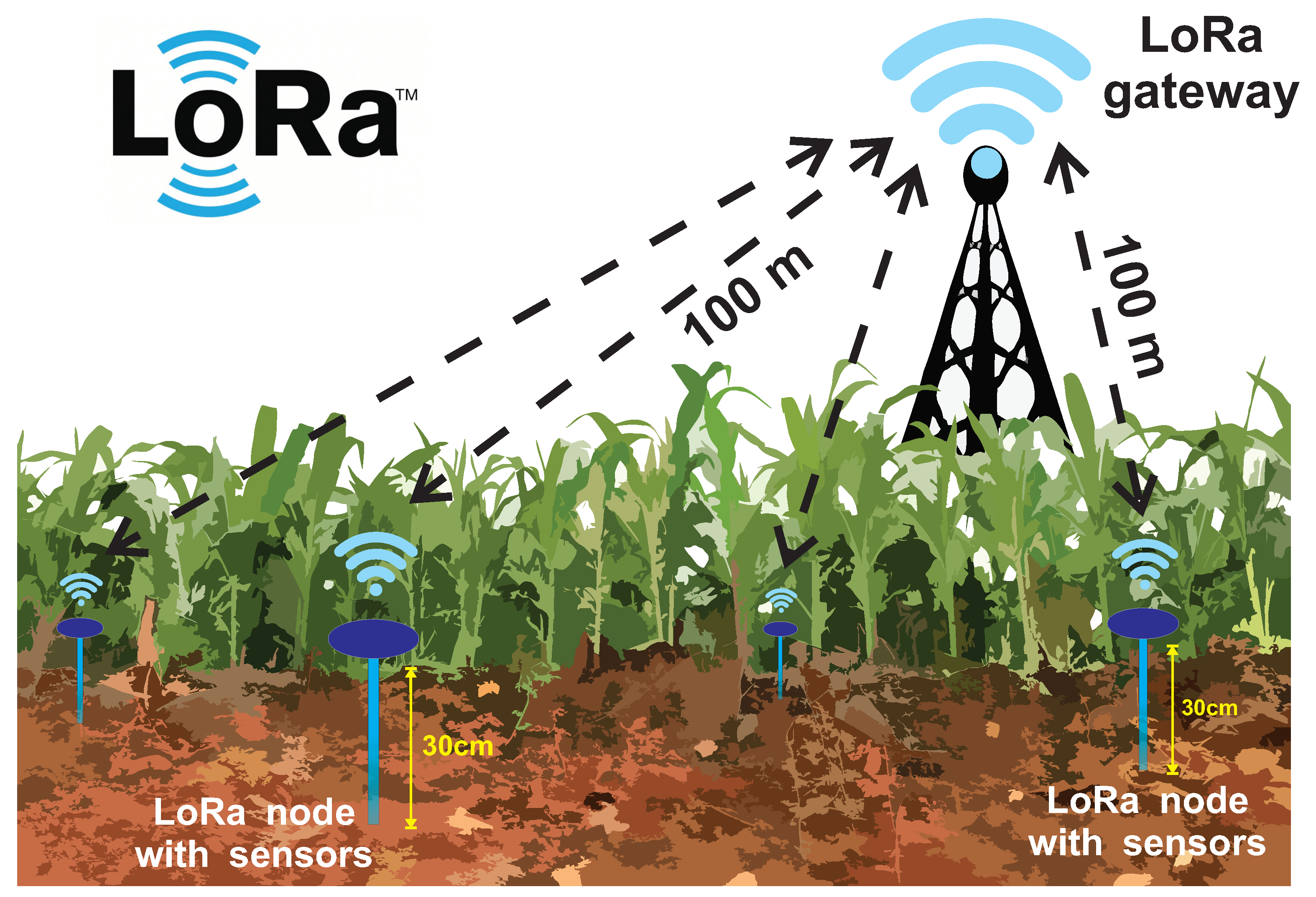
3.4. LoRa-Based Soil Sensing Systems
4. Inference Method and Evaluation Metrics
4.1. Method for Spectral Information Analysis
4.1.1. Principal Component Regression
4.1.2. Partial Least Square Regression
4.1.3. Uninformative Variable Elimination Method
4.1.4. Least Squares Support Vector Regressions
4.2. Evaluation Metrics
5. Future Aspect
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Adeyemi, O.; Grove, I.; Peets, S.; Norton, T. Advanced monitoring and management systems for improving sustainability in precision irrigation. Sustainability 2017, 9, 353. [Google Scholar] [CrossRef]
- Lipper, L.; Thornton, P.; Campbell, B.M.; Baedeker, T.; Braimoh, A.; Bwalya, M.; Caron, P.; Cattaneo, A.; Garrity, D.; Henry, K.; et al. Climate-smart agriculture for food security. Nat. Clim. Chang. 2014, 4, 1068–1072. [Google Scholar] [CrossRef]
- García, L.; Parra, L.; Jimenez, J.M.; Parra, M.; Lloret, J.; Mauri, P.V.; Lorenz, P. Deployment strategies of soil monitoring WSN for precision agriculture irrigation scheduling in rural areas. Sensors 2021, 21, 1693. [Google Scholar] [CrossRef]
- Halvorson, A.D.; Nielsen, D.C.; Reule, C.A. Nitrogen fertilization and rotation effects on no-till dryland wheat production. Agron. J. 2004, 96, 1196–1201. [Google Scholar] [CrossRef]
- Weinbaum, S.A.; Johnson, R.S.; DeJong, T.M. Causes and consequences of overfertilization in orchards. HortTechnology 1992, 2, 112b–121. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, J.; Wu, X.; Tian, Q.; Ji, J.; Qin, Z. Possibilities of reflectance spectroscopy for the assessment of contaminant elements in suburban soils. Appl. Geochem. 2005, 20, 1051–1059. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.A.; Behrens, T.; Ben-Dor, E.; Chabrillat, S.; Demattê, J.A.M.; Ge, Y.; Gomez, C.; Guerrero, C.; Peng, Y.; Ramirez-Lopez, L.; et al. Diffuse reflectance spectroscopy for estimating soil properties: A technology for the 21st century. Eur. J. Soil Sci. 2022, 73, e13271. [Google Scholar]
- Brown, D.J.; Shepherd, K.D.; Walsh, M.G.; Mays, M.D.; Reinsch, T.G. Global soil characterization with VNIR diffuse reflectance spectroscopy. Geoderma 2006, 132, 273–290. [Google Scholar] [CrossRef]
- Christy, C.D. Real-time measurement of soil attributes using on-the-go near infrared reflectance spectroscopy. Comput. Electron. Agric. 2008, 61, 10–19. [Google Scholar] [CrossRef]
- Spectrometer. Available online: https://bimedis.com/a-item/spectroscopy-equipment-bfrl-wqf-510-1946874 (accessed on 8 August 2023).
- Dotto, A.C.; Dalmolin, R.S.D.; Grunwald, S.; ten Caten, A.; Pereira Filho, W. Two preprocessing techniques to reduce model covariables in soil property predictions by Vis-NIR spectroscopy. Soil Tillage Res. 2017, 172, 59–68. [Google Scholar]
- Ding, J.; Chandra, R. Towards low cost soil sensing using Wi-Fi. In Proceedings of the 25th Annual International Conference on Mobile Computing and Networking, Los Cabos, Mexico, 21–25 October 2019; pp. 1–16. [Google Scholar]
- Khan, U.M.; Shahzad, M. Estimating soil moisture using RF signals. In Proceedings of the 28th Annual International Conference on Mobile Computing and Networking, Sydney, Australia, 17–21 October 2022; pp. 242–254. [Google Scholar]
- Wang, J.; Chang, L.; Aggarwal, S.; Abari, O.; Keshav, S. Soil moisture sensing with commodity RFID systems. In Proceedings of the 18th International Conference on Mobile Systems, Applications, and Services, Toronto, ON, Canada, 15–19 June 2020; pp. 273–285. [Google Scholar]
- Feng, Y.; Xie, Y.; Ganesan, D.; Xiong, J. LTE-Based Low-Cost and Low-Power Soil Moisture Sensing. In Proceedings of the 20th ACM Conference on Embedded Networked Sensor Systems, Boston, MA, USA, 6–9 November 2022; pp. 421–434. [Google Scholar]
- Chang, Z.; Zhang, F.; Xiong, J.; Ma, J.; Jin, B.; Zhang, D. Sensor-free soil moisture sensing using lora signals. In Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, Atlanta, USA and Cambridge, UK, 11–15 September 2022; Volume 6, pp. 1–27. [Google Scholar]
- Rossel, R.V.; Walvoort, D.; McBratney, A.; Janik, L.J.; Skjemstad, J. Visible, near infrared, mid infrared or combined diffuse reflectance spectroscopy for simultaneous assessment of various soil properties. Geoderma 2006, 131, 59–75. [Google Scholar] [CrossRef]
- Nduwamungu, C.; Ziadi, N.; Parent, L.É.; Tremblay, G.F.; Thuriès, L. Opportunities for, and limitations of, near infrared reflectance spectroscopy applications in soil analysis: A review. Can. J. Soil Sci. 2009, 89, 531–541. [Google Scholar] [CrossRef]
- Stenberg, B.; Rossel, R.A.V.; Mouazen, A.M.; Wetterlind, J. Visible and near infrared spectroscopy in soil science. Adv. Agron. 2010, 107, 163–215. [Google Scholar]
- Soriano-Disla, J.M.; Janik, L.J.; Viscarra Rossel, R.A.; Macdonald, L.M.; McLaughlin, M.J. The performance of visible, near-, and mid-infrared reflectance spectroscopy for prediction of soil physical, chemical, and biological properties. Appl. Spectrosc. Rev. 2014, 49, 139–186. [Google Scholar] [CrossRef]
- Fang, Q.; Hong, H.; Zhao, L.; Kukolich, S.; Yin, K.; Wang, C. Visible and near-infrared reflectance spectroscopy for investigating soil mineralogy: A review. J. Spectrosc. 2018, 2018, 3168974. [Google Scholar] [CrossRef]
- Mohamed, E.; Saleh, A.; Belal, A.; Gad, A. Application of near-infrared reflectance for quantitative assessment of soil properties. Egypt. J. Remote Sens. Space Sci. 2018, 21, 1–14. [Google Scholar] [CrossRef]
- Torrent, J.; Barrón, V. Diffuse reflectance spectroscopy. Methods Soil Anal. Part 5—Methods 2008, 5, 367–385. [Google Scholar]
- Pirie, A.; Singh, B.; Islam, K. Ultra-violet, visible, near-infrared, and mid-infrared diffuse reflectance spectroscopic techniques to predict several soil properties. Soil Res. 2005, 43, 713–721. [Google Scholar] [CrossRef]
- Chang, C.W.; Laird, D.A.; Mausbach, M.J.; Hurburgh, C.R. Near-infrared reflectance spectroscopy—Principal components regression analyses of soil properties. Soil Sci. Soc. Am. J. 2001, 65, 480–490. [Google Scholar] [CrossRef]
- Swinehart, D.F. The beer-lambert law. J. Chem. Educ. 1962, 39, 333. [Google Scholar] [CrossRef]
- Summers, D.; Lewis, M.; Ostendorf, B.; Chittleborough, D. Visible near-infrared reflectance spectroscopy as a predictive indicator of soil properties. Ecol. Indic. 2011, 11, 123–131. [Google Scholar] [CrossRef]
- Hardesty, J.H.; Attili, B. Spectrophotometry and the Beer-Lambert Law: An Important Analytical Technique in Chemistry; Department of Chemistry, Collin College: Collin County, TX, USA, 2010. [Google Scholar]
- Martens, H.; Nielsen, J.P.; Engelsen, S.B. Light scattering and light absorbance separated by extended multiplicative signal correction. Application to near-infrared transmission analysis of powder mixtures. Anal. Chem. 2003, 75, 394–404. [Google Scholar] [CrossRef]
- Svanberg, S. Atomic and Molecular Spectroscopy: Basic Aspects and Practical Applications; Springer: Berlin/Heidelberg, Germany, 2012; Volume 6. [Google Scholar]
- Murray, I. Chemical principles of near-infrared technology. In Near Infrared Technology in Agricultural and Food Industries; American Association of Cereal Chemists, Inc.: St. Paul, MN, USA, 1990. [Google Scholar]
- Bansod, S.J.; Thakare, S.S. Near Infrared spectroscopy based a portable soil nitrogen detector design. Int. J. Comput. Sci. Inf. Technol. 2014, 5, 3953–3956. [Google Scholar]
- Munawar, A.A.; Yunus, Y.; Satriyo, P. Calibration models database of near infrared spectroscopy to predict agricultural soil fertility properties. Data Brief 2020, 30, 105469. [Google Scholar] [CrossRef] [PubMed]
- Mukherjee, S.; Laskar, S. Vis-NIR-based optical sensor system for estimation of primary nutrients in soil. J. Opt. 2019, 48, 87–103. [Google Scholar] [CrossRef]
- Shao, Y.; He, Y. Nitrogen, phosphorus, and potassium prediction in soils, using infrared spectroscopy. Soil Res. 2011, 49, 166–172. [Google Scholar] [CrossRef]
- Nie, P.; Dong, T.; He, Y.; Qu, F. Detection of soil nitrogen using near infrared sensors based on soil pretreatment and algorithms. Sensors 2017, 17, 1102. [Google Scholar]
- Tan, B.; You, W.; Tian, S.; Xiao, T.; Wang, M.; Zheng, B.; Luo, L. Soil Nitrogen Content Detection Based on Near-Infrared Spectroscopy. Sensors 2022, 22, 8013. [Google Scholar]
- Yang, H.; Mouazen, A.M. Vis/near and mid-infrared spectroscopy for predicting soil N and C at a farm scale. In Infrared Spectroscopy—Life and Biomedical Sciences; InTech Open: London, UK, 2012; pp. 185–210. [Google Scholar]
- Maestre, S.; Mora, J.; Hernandis, V.; Todoli, J. A system for the direct determination of the nonvolatile organic carbon, dissolved organic carbon, and inorganic carbon in water samples through inductively coupled plasma atomic emission spectrometry. Anal. Chem. 2003, 75, 111–117. [Google Scholar]
- Bisutti, I.; Hilke, I.; Raessler, M. Determination of total organic carbon—An overview of current methods. TrAC Trends Anal. Chem. 2004, 23, 716–726. [Google Scholar] [CrossRef]
- Schumacher, B.A. Methods for the Determination of Total Organic Carbon (TOC) in Soils and Sediments; Office of Research and Development, US Environmental Protection Agency: Washington, DC, USA, 2002. [Google Scholar]
- McDowell, M.L.; Bruland, G.L.; Deenik, J.L.; Grunwald, S.; Knox, N.M. Soil total carbon analysis in Hawaiian soils with visible, near-infrared and mid-infrared diffuse reflectance spectroscopy. Geoderma 2012, 189, 312–320. [Google Scholar]
- Hutengs, C.; Seidel, M.; Oertel, F.; Ludwig, B.; Vohland, M. In situ and laboratory soil spectroscopy with portable visible-to-near-infrared and mid-infrared instruments for the assessment of organic carbon in soils. Geoderma 2019, 355, 113900. [Google Scholar]
- Nocita, M.; Stevens, A.; Toth, G.; Panagos, P.; van Wesemael, B.; Montanarella, L. Prediction of soil organic carbon content by diffuse reflectance spectroscopy using a local partial least square regression approach. Soil Biol. Biochem. 2014, 68, 337–347. [Google Scholar] [CrossRef]
- Minasny, B.; McBratney, A.B. Regression rules as a tool for predicting soil properties from infrared reflectance spectroscopy. Chemom. Intell. Lab. Syst. 2008, 94, 72–79. [Google Scholar] [CrossRef]
- Wijewardane, N.K.; Ge, Y.; Wills, S.; Loecke, T. Prediction of soil carbon in the conterminous United States: Visible and near infrared reflectance spectroscopy analysis of the rapid carbon assessment project. Soil Sci. Soc. Am. J. 2016, 80, 973–982. [Google Scholar] [CrossRef]
- Harwood, R.R. A history of sustainable agriculture. In Sustainable Agricultural Systems; CRC Press: Boca Raton, FL, USA, 2020; pp. 3–19. [Google Scholar]
- Thomasson, J.; Sui, R.; Cox, M.; Al-Rajehy, A. Soil reflectance sensing for determining soil properties in precision agriculture. Trans. ASAE 2001, 44, 1445. [Google Scholar] [CrossRef]
- Lobell, D.B.; Asner, G.P. Moisture effects on soil reflectance. Soil Sci. Soc. Am. J. 2002, 66, 722–727. [Google Scholar] [CrossRef]
- Weidong, L.; Baret, F.; Xingfa, G.; Qingxi, T.; Lanfen, Z.; Bing, Z. Relating soil surface moisture to reflectance. Remote Sens. Environ. 2002, 81, 238–246. [Google Scholar] [CrossRef]
- Bogrekci, I.; Lee, W. Effects of soil moisture content on absorbance spectra of sandy soils in sensing phosphorus concentrations using UV-VIS-NIR spectroscopy. Trans. ASABE 2006, 49, 1175–1180. [Google Scholar] [CrossRef]
- Tian, J.; Philpot, W.D. Relationship between surface soil water content, evaporation rate, and water absorption band depths in SWIR reflectance spectra. Remote Sens. Environ. 2015, 169, 280–289. [Google Scholar] [CrossRef]
- Chang, C.W.; Laird, D.A.; Hurburgh, C.R., Jr. Influence of soil moisture on near-infrared reflectance spectroscopic measurement of soil properties. Soil Sci. 2005, 170, 244–255. [Google Scholar] [CrossRef]
- Minasny, B.; McBratney, A.B.; Bellon-Maurel, V.; Roger, J.M.; Gobrecht, A.; Ferrand, L.; Joalland, S. Removing the effect of soil moisture from NIR diffuse reflectance spectra for the prediction of soil organic carbon. Geoderma 2011, 167, 118–124. [Google Scholar] [CrossRef]
- Nocita, M.; Stevens, A.; Noon, C.; van Wesemael, B. Prediction of soil organic carbon for different levels of soil moisture using Vis-NIR spectroscopy. Geoderma 2013, 199, 37–42. [Google Scholar] [CrossRef]
- Farifteh, J. Interference of salt and moisture on soil reflectance spectra. Int. J. Remote Sens. 2011, 32, 8711–8724. [Google Scholar]
- Kaiser, D.E.; Lamb, J.A.; Eliason, R. Fertilizer Guidelines for Agronomic Crops in Minnesota; University of Minnesota Digital Conservancy: Minneapolis, MN, USA, 2011. [Google Scholar]
- Da Silva Moretti, B.; Neto, A.E.F.; Benatti, B.P.; Deccetti, S.; de Jesus Lacerda, J.J.; de Castro Stehling, E. Nitrogen, potassium and phosphorous fertilizer suggestions for australian red cedar in Oxisol. Floresta 2015, 45, 599–608. [Google Scholar] [CrossRef]
- Khan, M.; Mobin, M.; Abbas, Z.; Alamri, S. Fertilizers and their contaminants in soils, surface and groundwater. Encycl. Anthr. 2018, 5, 225–240. [Google Scholar]
- Xu, D.; Ma, W.; Chen, S.; Jiang, Q.; He, K.; Shi, Z. Assessment of important soil properties related to Chinese Soil Taxonomy based on vis-NIR reflectance spectroscopy. Comput. Electron. Agric. 2018, 144, 1–8. [Google Scholar]
- Vibhute, A.D.; Kale, K.V.; Gaikwad, S.V.; Dhumal, R.K. Estimation of soil nitrogen in agricultural regions by VNIR reflectance spectroscopy. SN Appl. Sci. 2020, 2, 1–8. [Google Scholar]
- Kusumo, B.; Hedley, M.; Tuohy, M.; Hedley, C.; Arnold, G. Predicting soil carbon and nitrogen concentrations and pasture root densities from proximally sensed soil spectral reflectance. In Proximal Soil Sensing; Springer: Berlin/Heidelberg, Germany, 2010; pp. 177–190. [Google Scholar]
- Dhawale, N.M.; Adamchuk, V.I.; Viscarra, R.; Prasher, S.; Whalen, J.K.; Ismail, A. Predicting Extractable Soil Phosphorus Using Visible/Near-Infrared Hyperspectral Soil Reflectance Measurements; Paper No. 13; The Canadian Society for Bioengineering: Ottawa, ON, Canada, 2013; Volume 47. [Google Scholar]
- Abdi, D.; Tremblay, G.F.; Ziadi, N.; Bélanger, G.; Parent, L.É. Predicting soil phosphorus-related properties using near-infrared reflectance spectroscopy. Soil Sci. Soc. Am. J. 2012, 76, 2318–2326. [Google Scholar] [CrossRef]
- Hu, G.; Sudduth, K.A.; He, D.; Myers, D.B.; Nathan, M.V. Soil phosphorus and potassium estimation by reflectance spectroscopy. Trans. ASABE 2016, 59, 97–105. [Google Scholar]
- Abdi, H. Partial least square regression (PLS regression). Encycl. Res. Methods Soc. Sci. 2003, 6, 792–795. [Google Scholar]
- Van Iersel, M.; Seymour, R.M.; Chappell, M.; Watson, F.; Dove, S. Soil moisture sensor-based irrigation reduces water use and nutrient leaching in a commercial nursery. In Proceedings of the Southern Nursery Association Research Conference, Atlanta, GA, USA, 3 May 2009; Volume 54, pp. 17–21. [Google Scholar]
- Device, M. Shun Keda TR8D Soil Moisture Tester. Available online: https://www.yoycart.com/Product/671124075629/ (accessed on 8 August 2023).
- He, Y.; Xiao, S.; Nie, P.; Dong, T.; Qu, F.; Lin, L. Research on the optimum water content of detecting soil nitrogen using near infrared sensor. Sensors 2017, 17, 2045. [Google Scholar] [PubMed]
- Topp, G.C.; Davis, J.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar]
- Bro, R.; Smilde, A.K. Principal component analysis. Anal. Methods 2014, 6, 2812–2831. [Google Scholar]
- Höskuldsson, A. PLS regression methods. J. Chemom. 1988, 2, 211–228. [Google Scholar]
- Abdi, H. Partial least squares regression and projection on latent structure regression (PLS Regression). Wiley Interdiscip. Rev. Comput. Stat. 2010, 2, 97–106. [Google Scholar] [CrossRef]
- Wold, S.; Sjöström, M.; Eriksson, L. PLS-regression: A basic tool of chemometrics. Chemom. Intell. Lab. Syst. 2001, 58, 109–130. [Google Scholar]
- Teofilo, R.F.; Martins, J.P.A.; Ferreira, M.M. Sorting variables by using informative vectors as a strategy for feature selection in multivariate regression. J. Chemom. 2009, 23, 32–48. [Google Scholar] [CrossRef]
- Centner, V.; Massart, D.L.; de Noord, O.E.; de Jong, S.; Vandeginste, B.M.; Sterna, C. Elimination of uninformative variables for multivariate calibration. Anal. Chem. 1996, 68, 3851–3858. [Google Scholar] [CrossRef]
- Karamizadeh, S.; Abdullah, S.M.; Manaf, A.A.; Zamani, M.; Hooman, A. An overview of principal component analysis. J. Signal Inf. Process. 2013, 4, 173. [Google Scholar] [CrossRef]
- Han, Q.J.; Wu, H.L.; Cai, C.B.; Xu, L.; Yu, R.Q. An ensemble of Monte Carlo uninformative variable elimination for wavelength selection. Anal. Chim. Acta 2008, 612, 121–125. [Google Scholar]
- Liu, J.S. Monte Carlo Strategies in Scientific Computing; Springer: Berlin/Heidelberg, Germany, 2001; Volume 75. [Google Scholar]
- Adankon, M.M.; Cheriet, M. Model selection for the LS-SVM. Application to handwriting recognition. Pattern Recognit. 2009, 42, 3264–3270. [Google Scholar] [CrossRef]
- Zhou, S.; Chu, X.; Cao, S.; Liu, X.; Zhou, Y. Prediction of the ground temperature with ANN, LS-SVM and fuzzy LS-SVM for GSHP application. Geothermics 2020, 84, 101757. [Google Scholar]
- Wu, D.; He, Y.; Feng, S.; Sun, D.W. Study on infrared spectroscopy technique for fast measurement of protein content in milk powder based on LS-SVM. J. Food Eng. 2008, 84, 124–131. [Google Scholar]
- Wang, H.; Hu, D. Comparison of SVM and LS-SVM for regression. In Proceedings of the 2005 International Conference on Neural Networks and Brain, Beijing, China, 13–15 October 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 1, pp. 279–283. [Google Scholar]
- Syarif, I.; Prugel-Bennett, A.; Wills, G. SVM parameter optimization using grid search and genetic algorithm to improve classification performance. TELKOMNIKA Telecommun. Comput. Electron. Control. 2016, 14, 1502–1509. [Google Scholar] [CrossRef]
- Faller, A.J. An average correlation coefficient. J. Appl. Meteorol. (1962–1982) 1981, 20, 203–205. [Google Scholar]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE). Geosci. Model Dev. Discuss. 2014, 7, 1525–1534. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Year | Sample Preparation | Category of Properties | Signal Types | Calibration Method | Device & Environment | Applications |
|---|---|---|---|---|---|---|---|
| [17] | 2006 | ∘ | 🟉 | ∘ | ∘ | ∘ | |
| [18] | 2009 | ∘ | 🟉 | ∘ | ∘ | ∘ | |
| [19] | 2010 | 🟉 | 🟉 | ∘ | ∘ | ∘ | ∘ |
| [20] | 2014 | 🟉 | 🟉 | ∘ | ∘ | ∘ | |
| [21] | 2018 | 🟉 | ∘ | 🟉 | 🟉 | ||
| [22] | 2018 | ∘ | ∘ | ∘ | ∘ | ||
| [7] | 2022 | ∘ | 🟉 | ∘ | 🟉 | ∘ | 🟉 |
| This Paper | 2023 | 🟉 | ∘ | 🟉 | 🟉 | 🟉 | 🟉 |
| Spectral Range | Wavelength (nm) | Wave Number (cm−1) |
|---|---|---|
| Visible | 380–800 | 26,315–12,500 |
| NIR | 800–2500 | 12,500–4000 |
| MIR | 2500–25,000 | 4000–400 |
| VIS-NIR | 380–2400 | 26,315–4167 |
| VIS-NIR-MIR | 380–14,286 | 26,315–700 |
| Work | Year | Category | Preprocessing | Performance in | Calibration Method | Spectral Range |
|---|---|---|---|---|---|---|
| Total Carbon (TC) and Total Organic Carbon | ||||||
| [39] | 2003 | TOC | Required | 0.9995 | Regression | VNIR |
| [42] | 2012 | TC | Required | 0.95 | PLSR | VNIR & MIR |
| [44] | 2014 | TOC | Required | 0.85 | PLSR | VNIR |
| [46] | 2016 | TC/TOC | Required | 0.94 | Artificial Neural Network (ANN) | VNIR |
| [43] | 2019 | TOC | Required | 0.86 | PLSR | VNIR & MIR |
| Moisture | ||||||
| [50] | 2002 | Moisture | Required | 0.975 | Log | VNIR |
| Macronutrients | ||||||
| [35] | 2011 | N | Required | 0.90 | PLSR/LS-SVR | NIR/MIR |
| P | Required | 0.88 | ||||
| K | Required | 0.89 | ||||
| [33] | 2020 | N | Required | 0.91 | Linear/Unique Curve | VNIR |
| P | Required | 0.99 | ||||
| K | Required | 0.99 | ||||
| [34] | 2019 | N | Required | 0.87 | PCR/PLSR | NIR |
| P | Required | 0.99 | ||||
| K | Required | 0.90 | ||||
| [61] | 2020 | N | Required | 0.94 | PLSR | VNIR |
| [63] | 2013 | P | Required | 0.86 | PLSR | VNIR |
| Work | Category | Signal Type | Cost | Covering Range | Central Frequency | Energy Consumption | Capacity of Node | Error |
|---|---|---|---|---|---|---|---|---|
| [12] | Moisture | Wi-Fi | Less than 100 | Up to 30 cm depths | 2.4 GHz | High | Low | Less than 3% |
| [13] | Moisture | Wi-Fi | Less than 100 | Up to 38 cm depths | 2.5 GHz | High | Low | 1.1% |
| [14] | Moisture | RFID | Low | 2 m | 902.75–927.25 MHz | Extremly Low | High | 5% |
| [15] | Moisture | LTE | 55 | 2.4 km | 700–800 MHz | Medium | Low | 3.15% |
| [16] | Moisture | LoRa | 7.5 for LoRa Switch | 100 m | 915 MHz | Low | High | 3.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Zhang, X.; Xiao, L.; Li, T. Survey for Soil Sensing with IOT and Traditional Systems. Network 2023, 3, 482-501. https://doi.org/10.3390/network3040021
Wang J, Zhang X, Xiao L, Li T. Survey for Soil Sensing with IOT and Traditional Systems. Network. 2023; 3(4):482-501. https://doi.org/10.3390/network3040021
Chicago/Turabian StyleWang, Juexing, Xiao Zhang, Li Xiao, and Tianxing Li. 2023. "Survey for Soil Sensing with IOT and Traditional Systems" Network 3, no. 4: 482-501. https://doi.org/10.3390/network3040021