
The Obtainable Uncertainty for the Frequency Evaluation of Tones with Different Spectral Analysis Techniques


Abstract
:1. Introduction
2. Considered Methods
2.1. Non-Parametric Methods
2.1.1. IFFT-2p
2.1.2. IFFT-3p
2.1.3. IFFTc
2.2. Parametric Methods
2.2.1. MUSIC
2.2.2. ESPRIT
2.2.3. IWPA
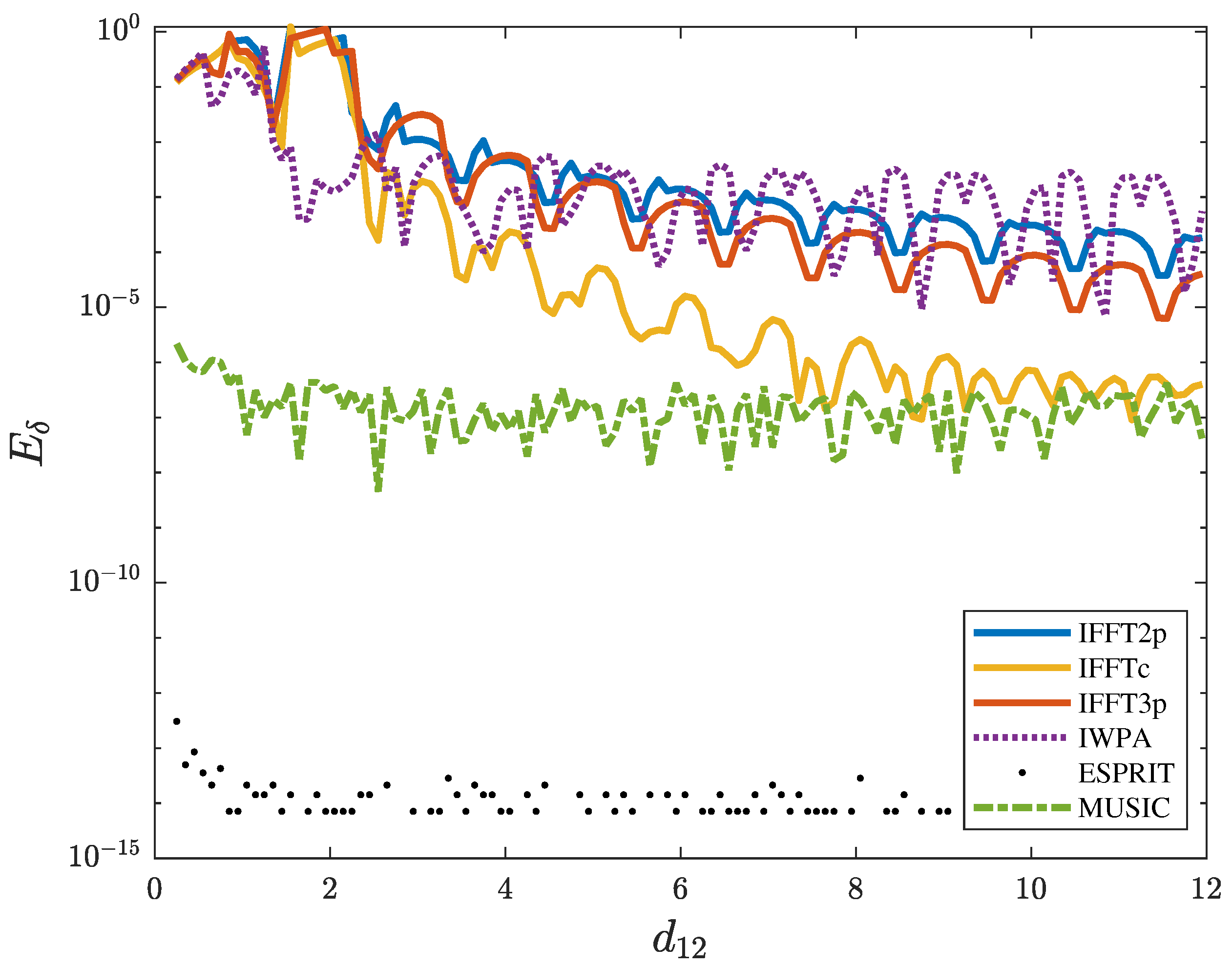
3. Residual Errors
- For each distance, the best performance is obtained by the ESPRIT method, that exhibits the lowest error at any distance between the tones since the error due to the frequency quantization is negligible.
- When the distance between tones is small (), the non-parametric approaches detect only one tone and the errors on the detected tone are significant (comparable with ). Even if the IWPA method is able to estimate both tones and its errors are lower than those of the parametric approach, the error is still high.
- The tone distance slightly influences the algorithms based on the autocorrelation (MUSIC and ESPRIT): only for lower than one bin is the MUSIC algorithm affected by a highest residual error.
- The performance of IWPA and IFFT are comparable, but for small tone distances, the IWPA gives better estimations—vice versa occurs for larger distances .
- The IFFTc algorithm for tone distance greater than 8 bin gives results comparable with MUSIC: errors of the order of 10-6 are measured for both tones.
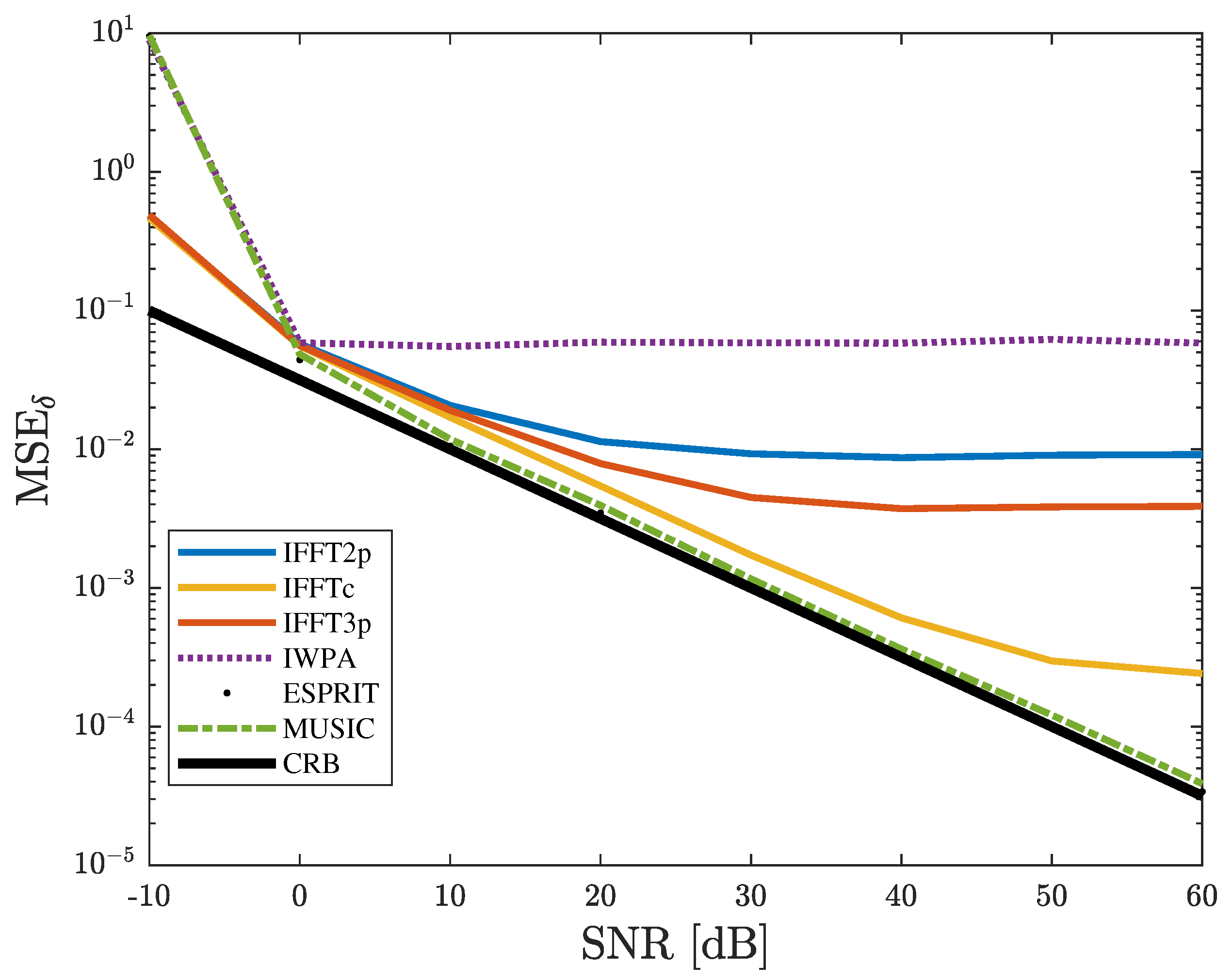
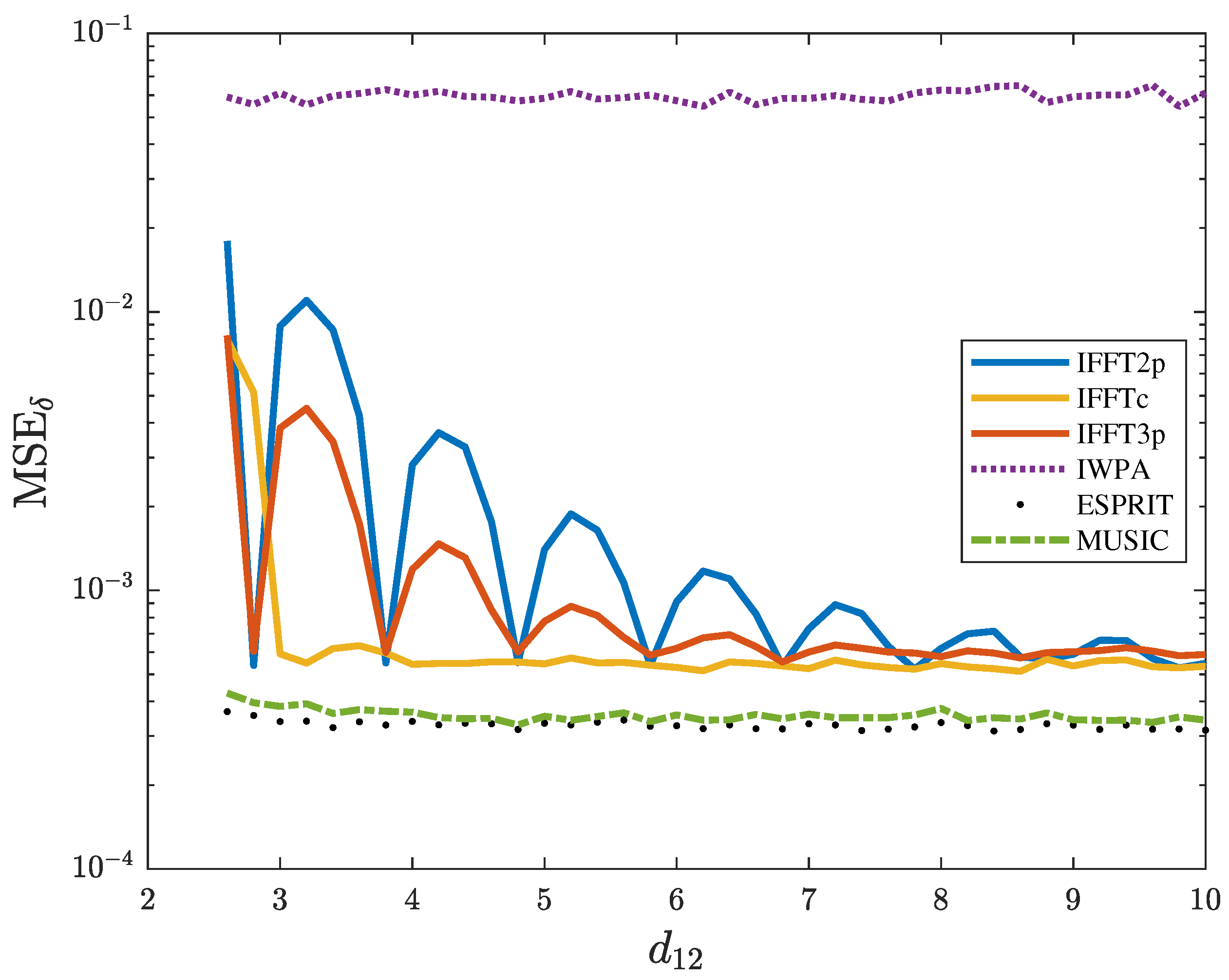
4. Repeatability under Noisy Conditions
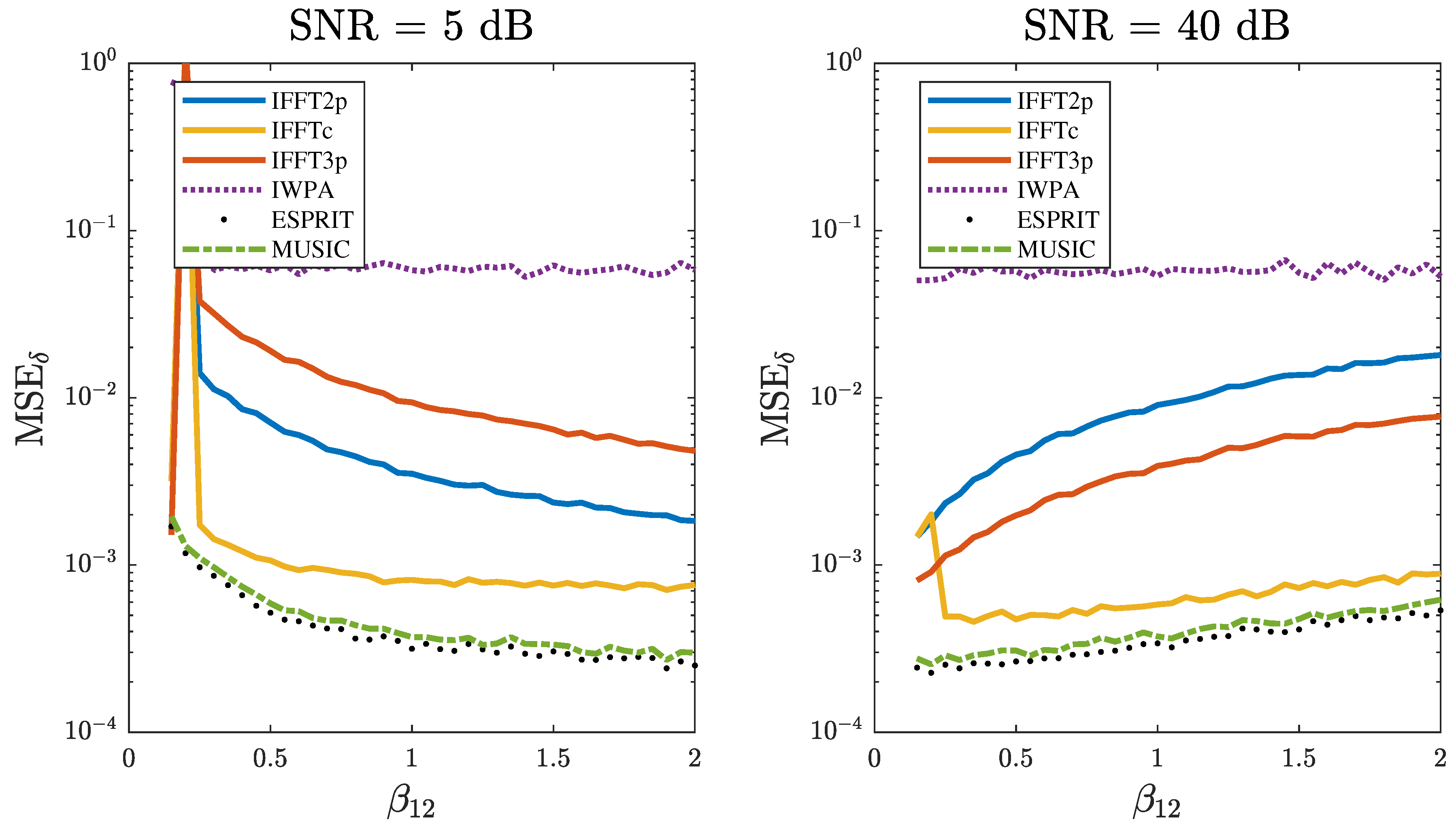
4.1. Sensitivity to the First Tone Distance
4.2. Sensitivity to the Tone–Amplitude Ratio
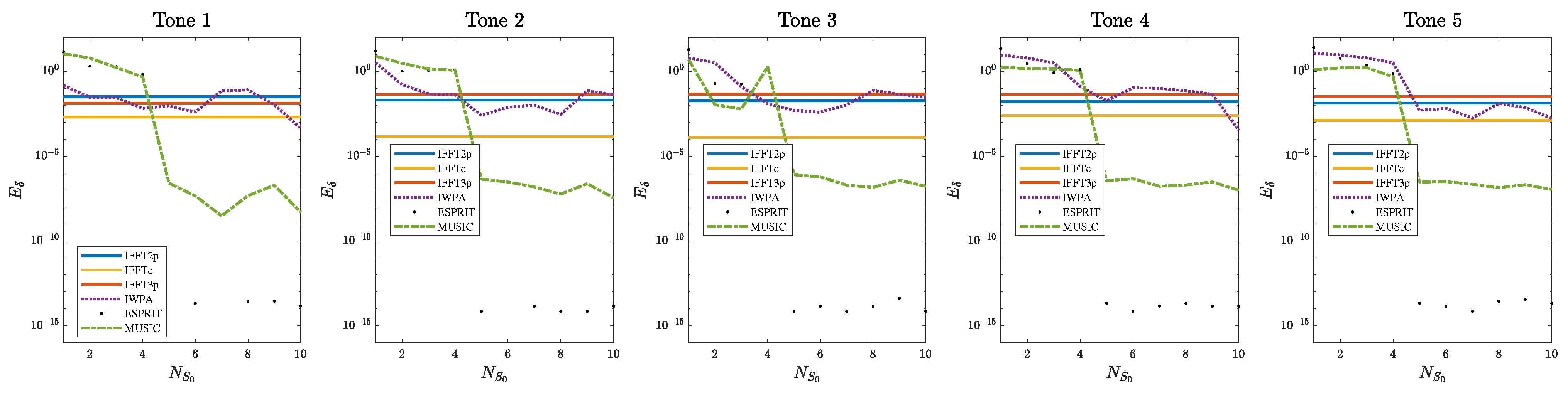
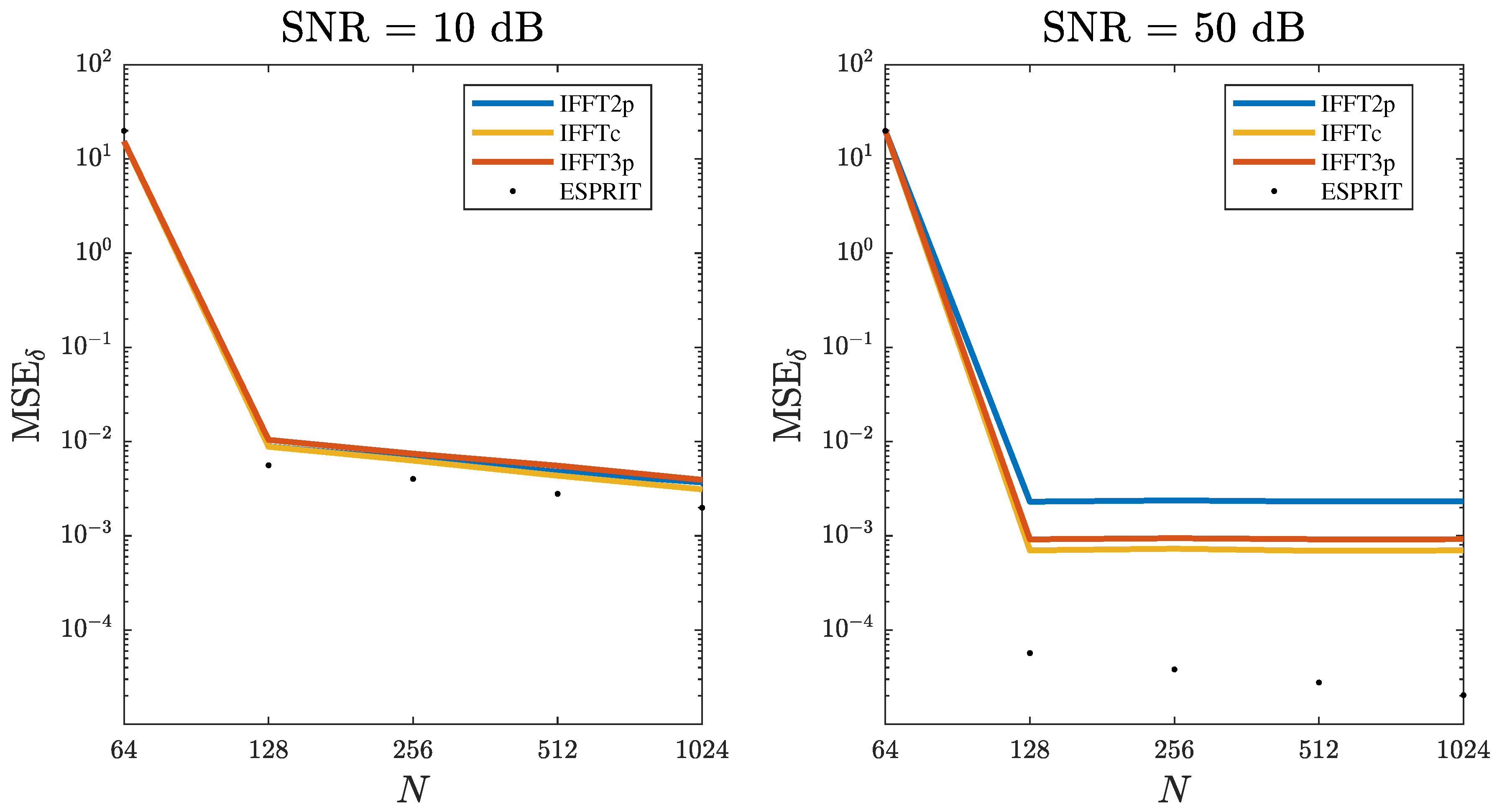
4.3. Sensitivity to the Number of Samples
5. Uncertainty Evaluation
6. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wen, H.; Li, C.; Yao, W. Power System Frequency Estimation of Sine-Wave Corrupted with Noise by Windowed Three-Point Interpolated DFT. IEEE Trans. Smart Grid 2018, 9, 5163–5172. [Google Scholar] [CrossRef]
- Jin, T.; Zhang, W. A Novel Interpolated DFT Synchrophasor Estimation Algorithm with an Optimized Combined Cosine Self-Convolution Window. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Song, X.; Li, X.; Zhang, W.G.; Zhou, W. The new measurement algorithm of the engine speed base on the basic frequency of vibration signal. In Proceedings of the 2010 International Conference on Computer, Mechatronics, Control and Electronic Engineering, Changchun, China, 24–26 August 2010; Volume 5, pp. 273–277. [Google Scholar] [CrossRef]
- Betta, G.; Liguori, C.; Pietrosanto, A. A multi-application FFT analyzer based on a DSP architecture. IEEE Trans. Instrum. Meas. 2001, 50, 825–832. [Google Scholar] [CrossRef]
- Ugwiri, M.; Carratu, M.; Paciello, V.; Liguori, C. Spectral negentropy and kurtogram performance comparison for bearing fault diagnosis. In Proceedings of the 17th IMEKO TC 10 and EUROLAB Virtual Conference “Global Trends in Testing, Diagnostics and Inspection for 2030”, Dubrovnik, Croatia, 19–22 October 2020; Number 165411. pp. 105–110. [Google Scholar]
- Kim, B.S.; Jin, Y.; Lee, J.; Kim, S. High-Efficiency Super-Resolution FMCW Radar Algorithm Based on FFT Estimation. Sensors 2021, 21, 4018. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Jiang, J.; Duan, F.; Liang, C.; Li, C.; Sun, Z.; Lu, R.; Li, F.; Xu, J.; Fu, X. A method for enhancement and automated extraction and tracing of Odontoceti whistle signals base on time-frequency spectrogram. Appl. Acoust. 2021, 176, 107698. [Google Scholar] [CrossRef]
- Chien, Y.R.; Wu, C.H.; Tsao, H.W. Automatic Sleep-Arousal Detection with Single-Lead EEG Using Stacking Ensemble Learning. Sensors 2021, 21, 6049. [Google Scholar] [CrossRef] [PubMed]
- Betta, G.; Liguori, C.; Paolillo, A.; Pietrosanto, A. A DSP-based FFT-analyzer for the fault diagnosis of rotating machine based on vibration analysis. IEEE Trans. Instrum. Meas. 2002, 51, 1316–1322. [Google Scholar] [CrossRef]
- Schoukens, J.; Pintelon, R.; Van Hamme, H. The interpolated fast Fourier transform: A comparative study. IEEE Trans. Instrum. Meas. 1992, 41, 226–232. [Google Scholar] [CrossRef]
- Agrez, D. Weighted multipoint interpolated DFT to improve amplitude estimation of multifrequency signal. IEEE Trans. Instrum. Meas. 2002, 51, 287–292. [Google Scholar] [CrossRef]
- Belega, D.; Petri, D. Frequency estimation by two- or three-point interpolated Fourier algorithms based on Cosine windows. Signal Process. 2015, 117, 115–125. [Google Scholar] [CrossRef]
- Kumar, B.R.; Mohapatra, A.; Chakrabarti, S. Combined Two-Point and Three-Point Interpolated DFT for Frequency Estimation. In Proceedings of the 2020 21st National Power Systems Conference (NPSC), Gandhinagar, India, 17–19 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, K.; Wen, H.; Li, G. Accurate Frequency Estimation by Using Three-Point Interpolated Discrete Fourier Transform Based on Rectangular Window. IEEE Trans. Ind. Inform. 2021, 17, 73–81. [Google Scholar] [CrossRef]
- Wu, K.; Ni, W.; Andrew Zhang, J.; Liu, R.P.; Jay Guo, Y. Refinement of Optimal Interpolation Factor for DFT Interpolated Frequency Estimator. IEEE Commun. Lett. 2020, 24, 782–786. [Google Scholar] [CrossRef]
- Liguori, C.; Paolillo, A.; Pignotti, A. An intelligent FFT analyzer with harmonic interference effect correction and uncertainty evaluation. IEEE Trans. Instrum. Meas. 2004, 53, 1125–1131. [Google Scholar] [CrossRef]
- Liguori, C.; Paolillo, A. Implementing uncertainty auto-evaluation capabilities on an intelligent FFT-analyzer. In Proceedings of the 19th IEEE Instrumentation and Measurement Technology Conference (IEEE Cat. No.00CH37276) (IMTC/2002), Anchorage, AK, USA, 21–23 May 2002; Volume 1, pp. 657–662. [Google Scholar] [CrossRef]
- Liguori, C.; Paciello, V.; Paolillo, A. Parameter estimation of spectral components of a signal: Comparison of techniques. In Proceedings of the 2007 IEEE Instrumentation Measurement Technology Conference IMTC 2007, Warsaw, Poland, 1–3 May 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Kusuma, J. Parametric frequency estimation: Esprit and music. Rice University, 2002. Available online: https://cnx.org/contents/WIub0IP5@4/Parametric-frequency-estimation (accessed on 22 February 2022).
- Pisarenko, V.F. The Retrieval of Harmonics from a Covariance Function. Geophys. J. Int. 1973, 33, 347–366. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Paulraj, A.; Kailath, T. Estimation of Signal Parameters via Rotational Invariance Techniques—ESPRIT. In Proceedings of the MILCOM 1986—IEEE Military Communications Conference: Communications-Computers: Teamed for the 90’s, Monterey, CA, USA, 5–9 October 1986; Volume 3, pp. 41.6.1–41.6.5. [Google Scholar] [CrossRef]
- Roy, R.; Paulraj, A.; Kailath, T. ESPRIT–A subspace rotation approach to estimation of parameters of cisoids in noise. IEEE Trans. Acoust. Speech, Signal Process. 1986, 34, 1340–1342. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall PTR: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Gabriele D’Antona, A.F. Digital Signal Processing for Measurement Systems: Theory and Applications; Springer Nature: New York, NY, USA, 2005. [Google Scholar]
- Williams, J.H. Guide to the Expression of Uncertainty in Measurement (the GUM). In Quantifying Measurement; Morgan and Claypool Publishers: San Rafael, CA, USA, 2016; pp. 6-1–6-9. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tone 1 | Tone 2 | ||||||||||||
| IFFT2p | IFFTc | IFFT3p | IWPA | ESPRIT | MUSIC | IFFT2p | IFFTc | IFFT3p | IWPA | ESPRIT | MUSIC | ||
| 3 | 4 | 6.7 × 10 | 1.5 × 10 | 2.4 × 10 | 1.1 × 10 | 1.1 × 10 | 1.6 × 10 | - | - | - | 1.1 × 10 | 9.6 × 10 | 1.6 × 10 |
| 4 | 5 | 3.0 × 10 | 6.0 × 10 | 9.1 × 10 | 1.1 × 10 | 1.1 × 10 | 1.8 × 10 | 6.6 × 10 | 5.8 × 10 | 6.7 × 10 | 1.0 × 10 | 9.3 × 10 | 1.8 × 10 |
| 5 | 6 | 1.6 × 10 | 1.0 × 10 | 4.3 × 10 | 1.1 × 10 | 1.1 × 10 | 1.9 × 10 | 1.2 × 10 | 3.6 × 10 | 5.5 × 10 | 1.0 × 10 | 9.9 × 10 | 1.9 × 10 |
| 6 | 7 | 9.5 × 10 | 3.4 × 10 | 2.3 × 10 | 1.1 × 10 | 1.0 × 10 | 1.6 × 10 | 7.7 × 10 | 3.2 × 10 | 2.6 × 10 | 1.0 × 10 | 9.9 × 10 | 1.7 × 10 |
| 7 | 12 | 3.5 × 10 | 5.6 × 10 | 6.7 × 10 | 1.1 × 10 | 1.0 × 10 | 1.7 × 10 | 2.9 × 10 | 2.8 × 10 | 7.4 × 10 | 1.0 × 10 | 9.4 × 10 | 1.7 × 10 |
| 12 | 20 | 7.8 × 10 | 1.8 × 10 | 9.4 × 10 | 1.1 × 10 | 1.0 × 10 | 1.7 × 10 | 6.5 × 10 | 2.2 × 10 | 9.8 × 10 | 9.7 × 10 | 9.3 × 10 | 1.7 × 10 |
| Tone 1 | Tone 2 | ||||||||||||
| IFFT2p | IFFTc | IFFT3p | IWPA | ESPRIT | MUSIC | IFFT2p | IFFTc | IFFT3p | IWPA | ESPRIT | MUSIC | ||
| 3 | 4 | 6.8 × 10 | 2.3 × 10 | 2.4 × 10 | 1.3 × 10 | 1.1 × 10 | 1.6 × 10 | 5.3 × 10 | 2.3 × 10 | 3.5 × 10 | 1.0 × 10 | 1.2 × 10 | 1.6 × 10 |
| 4 | 5 | 3.0 × 10 | 3.8 × 10 | 9.1 × 10 | 1.2 × 10 | 1.1 × 10 | 1.8 × 10 | 2.4 × 10 | 4.1 × 10 | 1.2 × 10 | 1.0 × 10 | 1.2 × 10 | 1.8 × 10 |
| 5 | 6 | 1.6 × 10 | 9.9 × 10 | 4.3 × 10 | 1.2 × 10 | 1.1 × 10 | 1.9 × 10 | 1.3 × 10 | 1.2 × 10 | 5.2 × 10 | 1.0 × 10 | 1.2 × 10 | 1.9 × 10 |
| 6 | 7 | 9.5 × 10 | 3.4 × 10 | 2.3 × 10 | 1.2 × 10 | 1.1 × 10 | 1.6 × 10 | 7.8 × 10 | 5.3 × 10 | 2.6 × 10 | 1.0 × 10 | 1.3 × 10 | 1.7 × 10 |
| 7 | 12 | 3.6 × 10 | 6.0 × 10 | 7.0 × 10 | 1.1 × 10 | 1.1 × 10 | 1.7 × 10 | 3.1 × 10 | 3.0 × 10 | 7.9 × 10 | 9.3 × 10 | 1.2 × 10 | 1.7 × 10 |
| 12 | 20 | 1.9 × 10 | 1.9 × 10 | 1.5 × 10 | 1.1 × 10 | 1.1 × 10 | 1.6 × 10 | 1.6 × 10 | 1.4 × 10 | 1.5 × 10 | 9.7 × 10 | 1.3 × 10 | 1.6 × 10 |
| Tone 1 | Tone 2 | ||||||||||||
| IFFT2p | IFFTc | IFFT3p | IWPA | ESPRIT | MUSIC | IFFT2p | IFFTc | IFFT3p | IWPA | ESPRIT | MUSIC | ||
| 3 | 4 | 6.8 × 10 | 2.3 × 10 | 2.4 × 10 | 4.0 × 10 | 1.1 × 10 | 1.6 × 10 | 5.4 × 10 | 2.3 × 10 | 3.5 × 10 | 1.0 × 10 | 1.1 × 10 | 1.6 × 10 |
| 4 | 5 | 3.0 × 10 | 3.8 × 10 | 9.1 × 10 | 4.2 × 10 | 1.0 × 10 | 1.8 × 10 | 2.4 × 10 | 4.1 × 10 | 1.2 × 10 | 1.0 × 10 | 1.1 × 10 | 1.8 × 10 |
| 5 | 6 | 1.6 × 10 | 9.9 × 10 | 4.3 × 10 | 2.9 × 10 | 1.1 × 10 | 1.9 × 10 | 1.3 × 10 | 1.1 × 10 | 5.2 × 10 | 1.0 × 10 | 1.1 × 10 | 1.9 × 10 |
| 6 | 7 | 9.5 × 10 | 3.4 × 10 | 2.3 × 10 | 3.0 × 10 | 1.1 × 10 | 1.7 × 10 | 7.8 × 10 | 4.0 × 10 | 2.6 × 10 | 1.0 × 10 | 1.1 × 10 | 1.7 × 10 |
| 7 | 12 | 3.6 × 10 | 7.3 × 10 | 7.0 × 10 | 2.2 × 10 | 1.1 × 10 | 1.7 × 10 | 3.1 × 10 | 8.5 × 10 | 7.9 × 10 | 9.3 × 10 | 1.0 × 10 | 1.7 × 10 |
| 12 | 20 | 7.4 × 10 | 3.0 × 10 | 9.4 × 10 | 1.6 × 10 | 1.1 × 10 | 1.7 × 10 | 6.5 × 10 | 2.4 × 10 | 9.7 × 10 | 9.6 × 10 | 1.0 × 10 | 1.7 × 10 |
| Case 1 | Case 2 | Case 3 | Case 4 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| , , | , , | , , | , , | ||||||||||
| SNR = 40 dB | SNR = 80 dB | SNR = 10 dB | SNR = 60 dB | ||||||||||
| IFFT3p | ESPRIT | IFFTc | IFFT3p | ESPRIT | IFFTc | IFFT3p | ESPRIT | IFFTc | IFFT3p | ESPRIT | |||
| meas. | 1.03 × 10 | 1.72 × 10 | 6.29 × 10 | 6.99 × 10 | 8.88 × 10 | 4.25 × 10 | 8.98 × 10 | 1.03 × 10 | 5.43 × 10 | 2.84 × 10 | 3.16 × 10 | 1.70 × 10 | |
| exp. | 1.03 × 10 | 1.72 × 10 | 6.28 × 10 | 6.99 × 10 | 7.52 × 10 | 4.24 × 10 | 8.97 × 10 | 1.03 × 10 | 5.43 × 10 | 2.84 × 10 | 3.16 × 10 | 1.70 × 10 | |
| meas. | 2.96 × 10 | 3.52 × 10 | 1.74 × 10 | 1.58 × 10 | 2.05 × 10 | 1.01 × 10 | 1.28 × 10 | 1.44 × 10 | 6.92 × 10 | 5.26 × 10 | 6.52 × 10 | 3.37 × 10 | |
| exp. | 2.98 × 10 | 3.27 × 10 | 1.74 × 10 | 1.58 × 10 | 1.22 × 10 | 1.01 × 10 | 1.28 × 10 | 1.20 × 10 | 6.93 × 10 | 5.26 × 10 | 6.50 × 10 | 3.37 × 10 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dello Iacono, S.; Di Leo, G.; Liguori, C.; Paciello, V. The Obtainable Uncertainty for the Frequency Evaluation of Tones with Different Spectral Analysis Techniques. Metrology 2022, 2, 216-229. https://doi.org/10.3390/metrology2020013
Dello Iacono S, Di Leo G, Liguori C, Paciello V. The Obtainable Uncertainty for the Frequency Evaluation of Tones with Different Spectral Analysis Techniques. Metrology. 2022; 2(2):216-229. https://doi.org/10.3390/metrology2020013
Chicago/Turabian StyleDello Iacono, Salvatore, Giuseppe Di Leo, Consolatina Liguori, and Vincenzo Paciello. 2022. "The Obtainable Uncertainty for the Frequency Evaluation of Tones with Different Spectral Analysis Techniques" Metrology 2, no. 2: 216-229. https://doi.org/10.3390/metrology2020013