
Wearable Sensors for Identifying Activity Signatures in Human-Robot Collaborative Agricultural Environments †

 ,
,  ,
,  ,
,  and
and 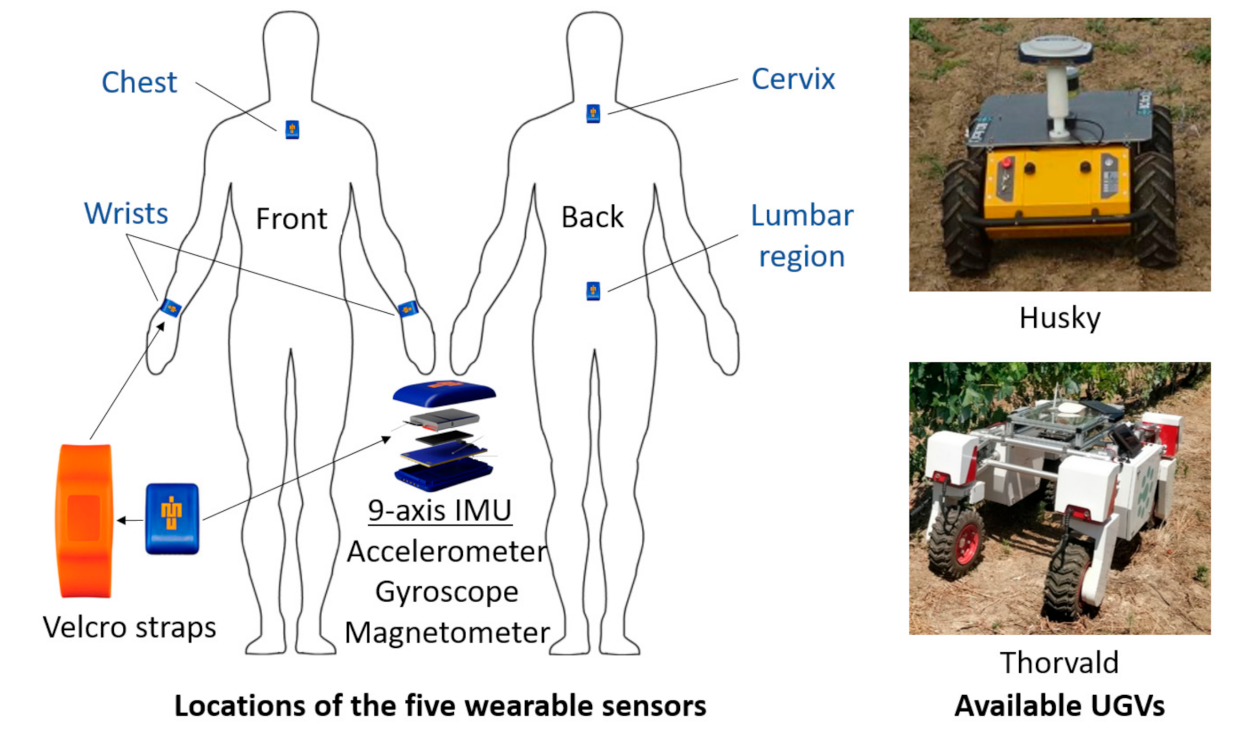{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
Experimental Setup and Signal Processing
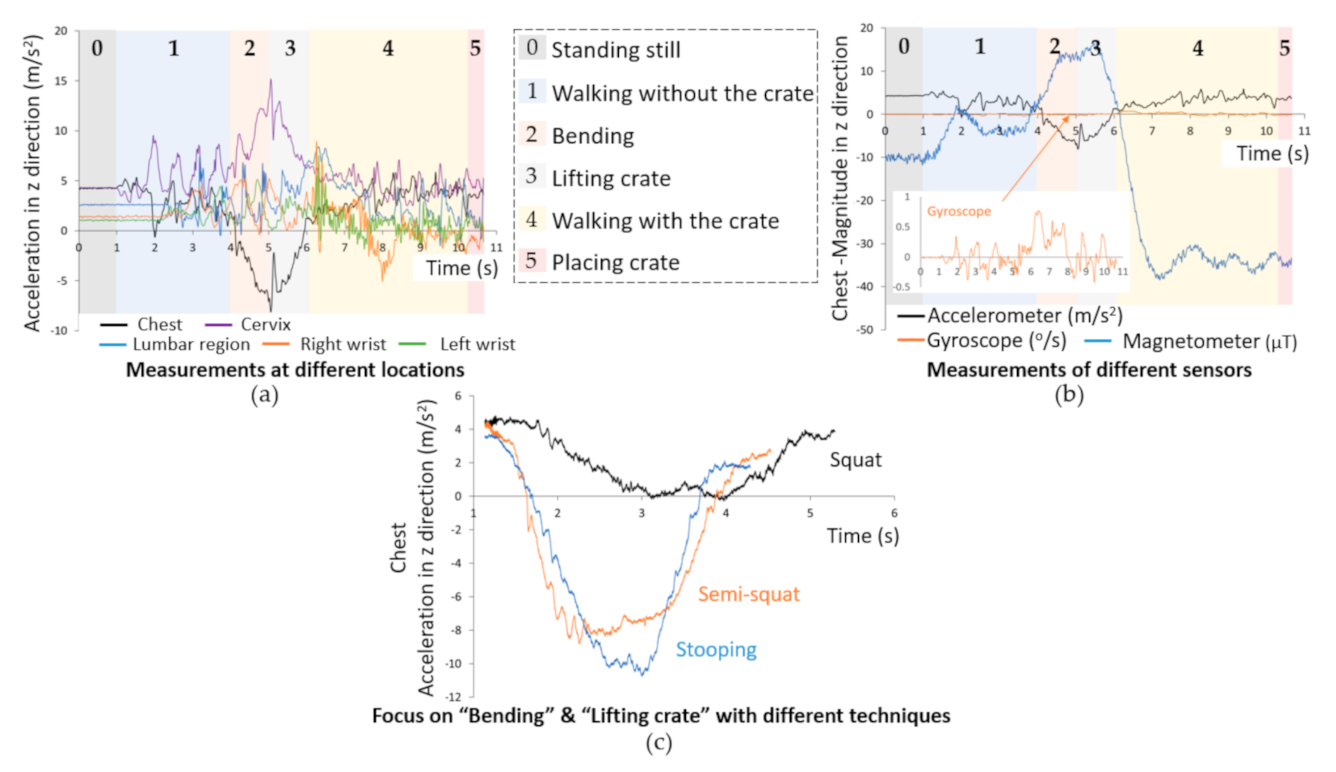
3. Results and Discussion
Author Contributions
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Benos, L.; Bechar, A.; Bochtis, D. Safety and ergonomics in human-robot interactive agricultural operations. Biosyst. Eng. 2020, 200, 55–72. [Google Scholar] [CrossRef]
- Anagnostis, A.; Benos, L.; Tsaopoulos, D.; Tagarakis, A.; Tsolakis, N.; Bochtis, D. Human activity recognition through recurrent neural networks for human-robot interaction in agriculture. Appl. Sci. 2021, 11, 2188. [Google Scholar] [CrossRef]
- Benos, L.; Tsaopoulos, D.; Bochtis, D. A review on ergonomics in agriculture. Part I: Manual operations. Appl. Sci. 2020, 10, 1905. [Google Scholar] [CrossRef] [Green Version]
- Open Datasets—iBO. Available online: https://ibo.certh.gr/open-datasets/ (accessed on 1 March 2021).
- Benos, L.; Tsaopoulos, D.; Bochtis, D. A Review on Ergonomics in Agriculture. Part II: Mechanized Operations. Appl. Sci. 2020, 10, 3484. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tagarakis, A.C.; Benos, L.; Aivazidou, E.; Anagnostis, A.; Kateris, D.; Bochtis, D. Wearable Sensors for Identifying Activity Signatures in Human-Robot Collaborative Agricultural Environments. Eng. Proc. 2021, 9, 5. https://doi.org/10.3390/engproc2021009005
Tagarakis AC, Benos L, Aivazidou E, Anagnostis A, Kateris D, Bochtis D. Wearable Sensors for Identifying Activity Signatures in Human-Robot Collaborative Agricultural Environments. Engineering Proceedings. 2021; 9(1):5. https://doi.org/10.3390/engproc2021009005
Chicago/Turabian StyleTagarakis, Aristotelis C., Lefteris Benos, Eirini Aivazidou, Athanasios Anagnostis, Dimitrios Kateris, and Dionysis Bochtis. 2021. "Wearable Sensors for Identifying Activity Signatures in Human-Robot Collaborative Agricultural Environments" Engineering Proceedings 9, no. 1: 5. https://doi.org/10.3390/engproc2021009005