
3D Printed Energy Return Elements for Upper Limb Sports Prosthetics

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background
2.1. Energy Return in Prosthetics
2.2. 3D Printed Prosthetics
2.3. Existing Basketball Prosthetics
3. Materials and Methods
3.1. Materials: Sensing with Conductive Polymer Composites
3.2. Methods: 3D-Printed Springs
4. Energy Return Design
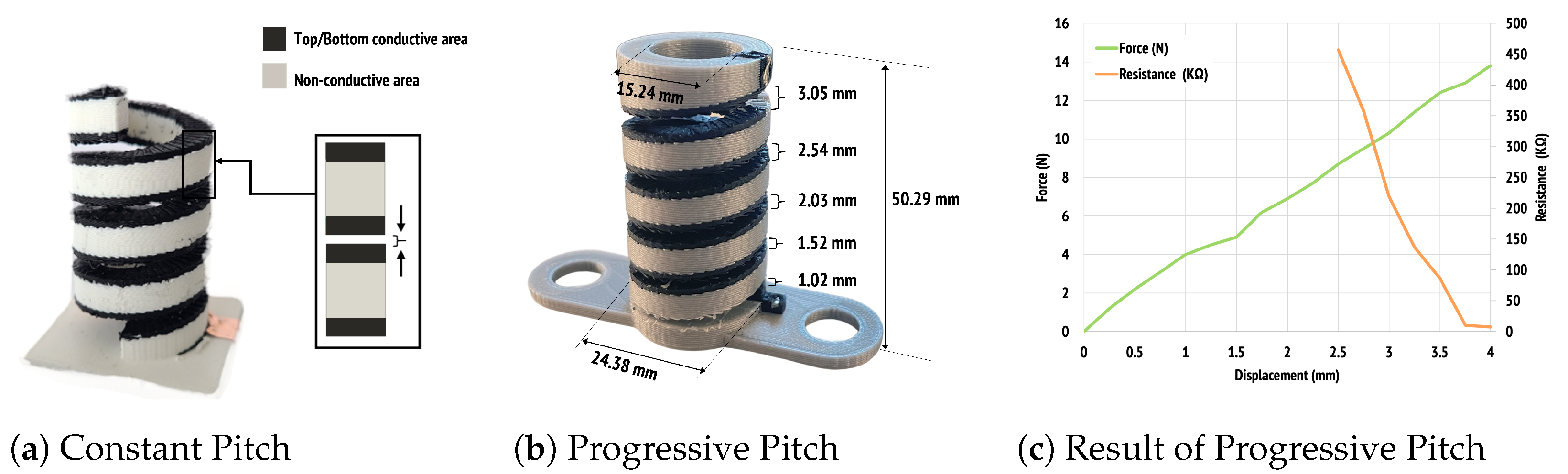
4.1. Coil Spring
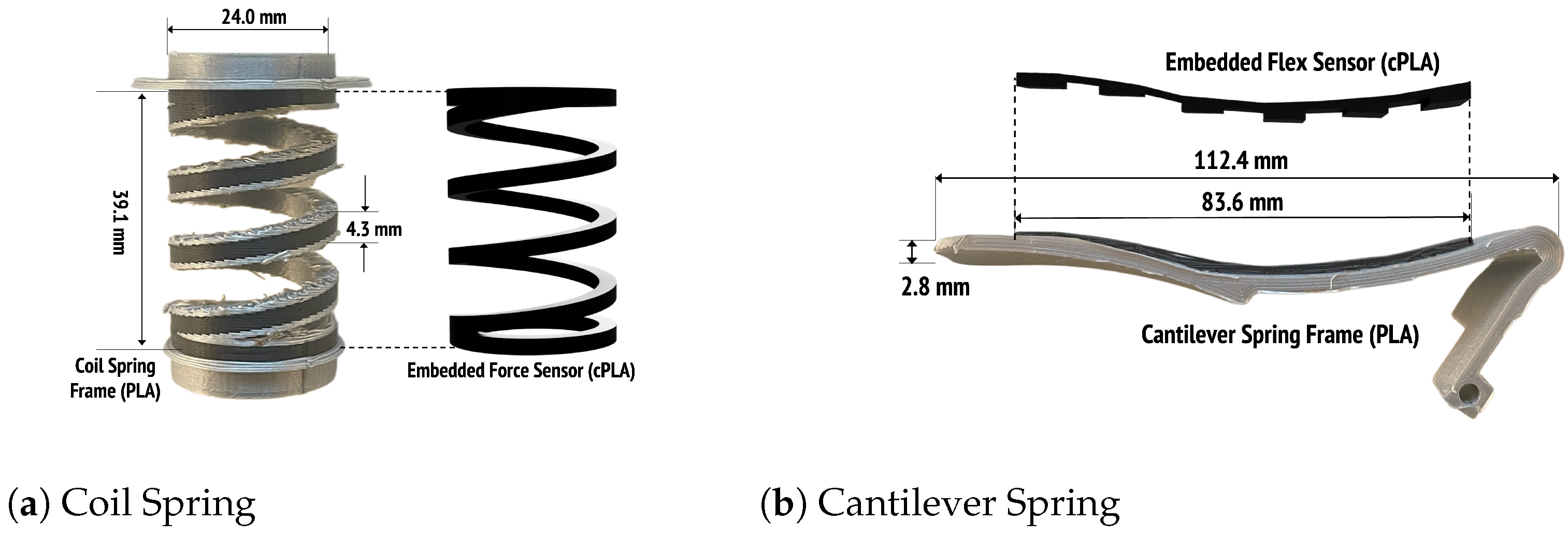
4.1.1. Mechanical Structure
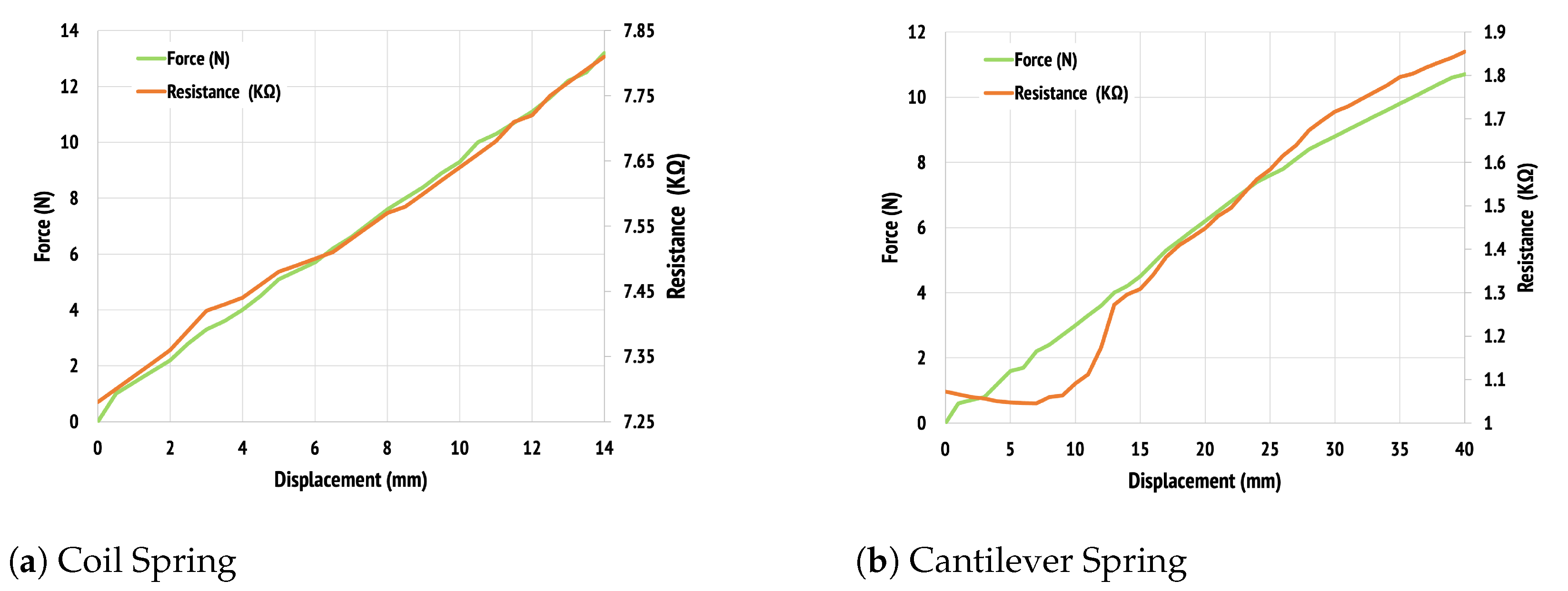
4.1.2. Mechanical Energy Storage
4.1.3. Embedded Sensing
4.1.4. Iterative Design of a Force-Sensing Coil Spring
4.1.5. Design Implications and Guideline
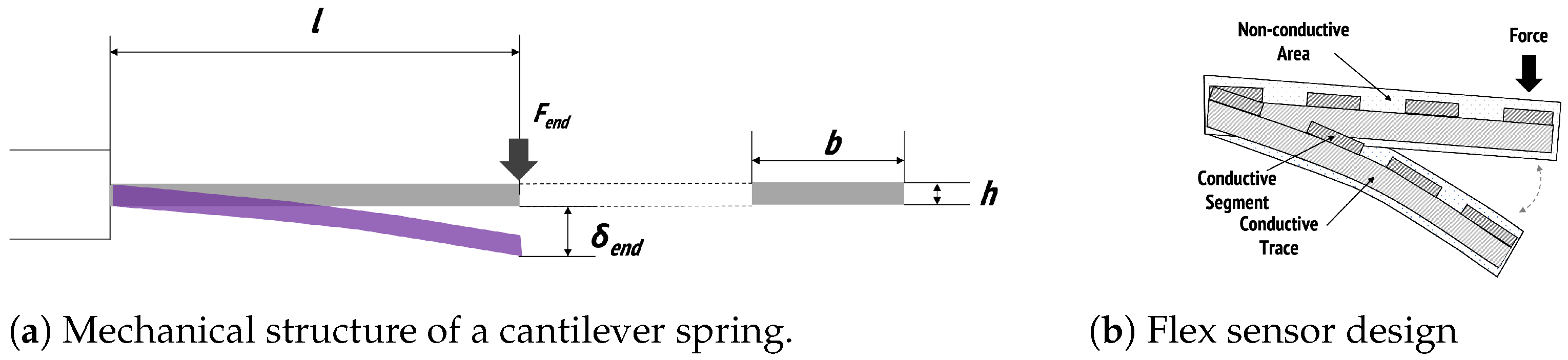
4.2. Cantilever Spring
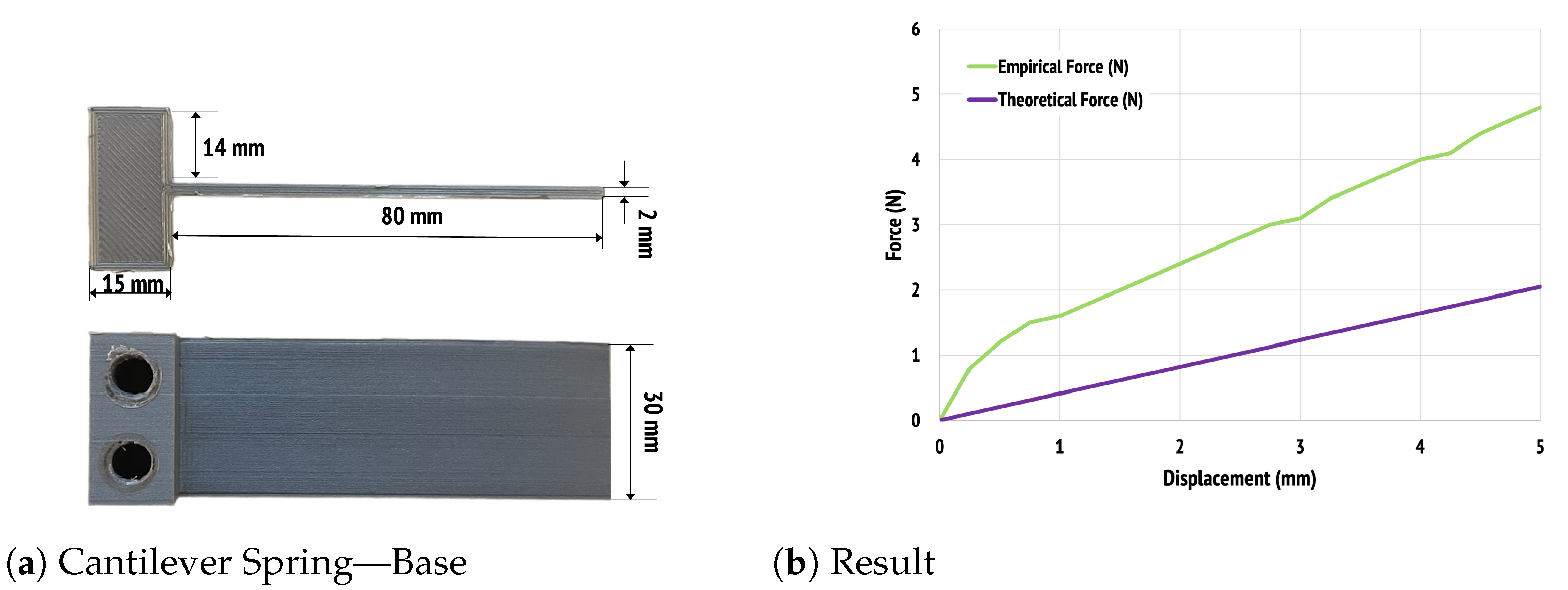
4.2.1. Mechanical Structure
4.2.2. Mechanical Energy Storage
4.2.3. Electrical Structure
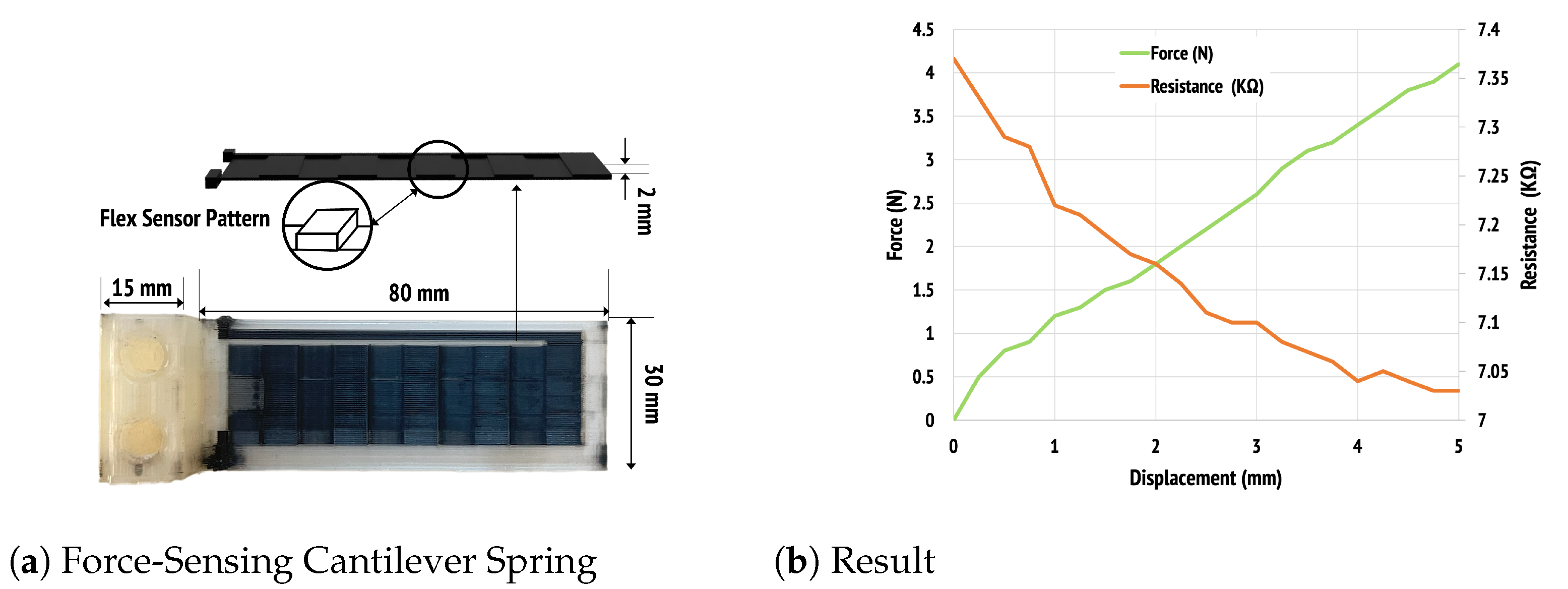
4.2.4. Design of a Force-Sensing Cantilever Spring
4.2.5. Design Implication and Guideline
5. Bio-Mimetic Prosthetic Design with Force-Sensing Springs
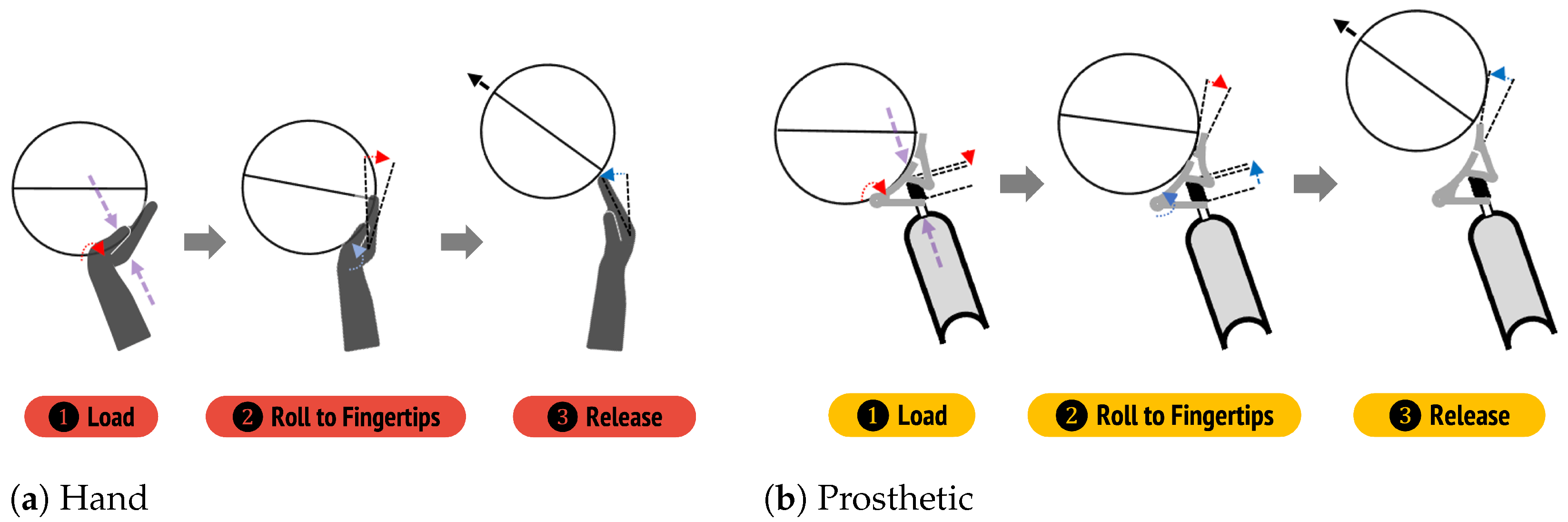
5.1. Fundamental Biomechanics
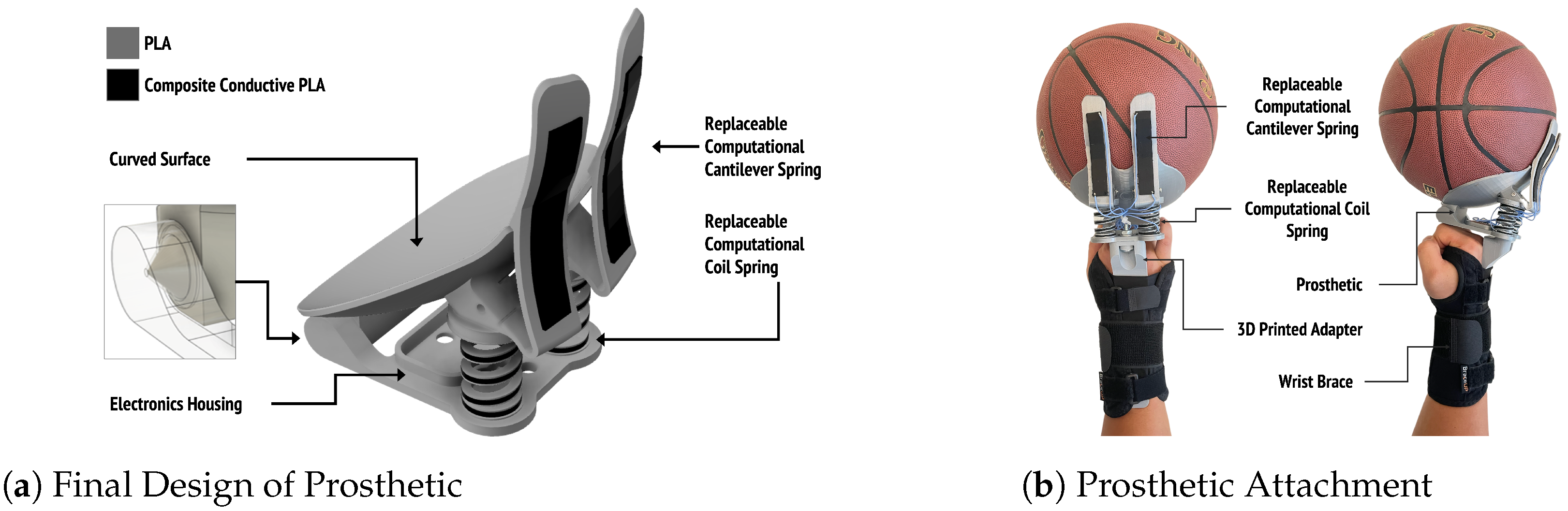
5.2. Prosthetic Energy Return Design
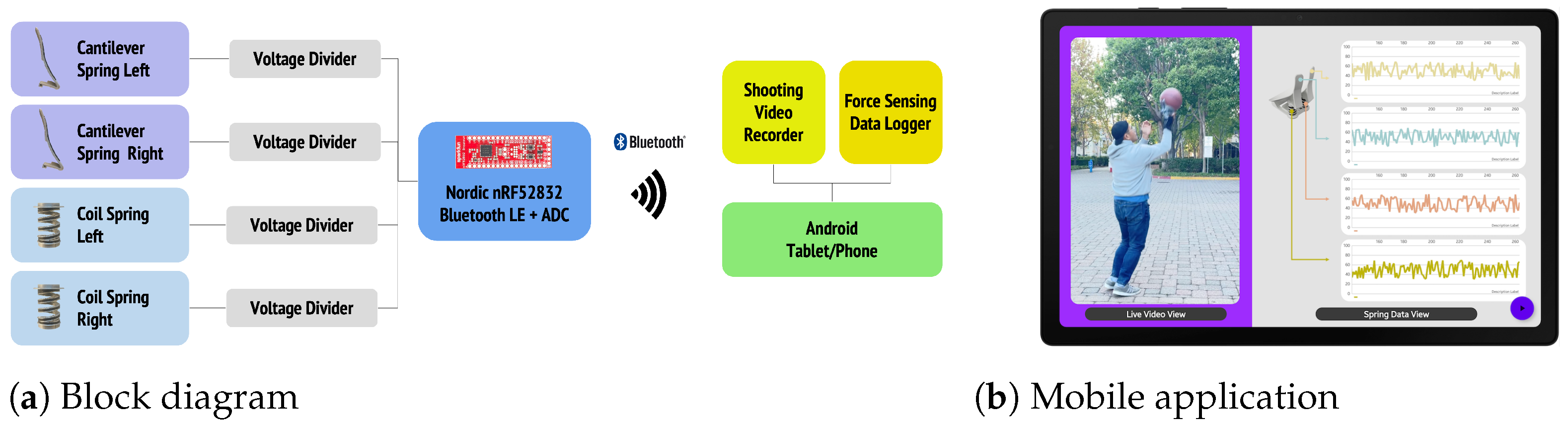
5.3. Real-Time Monitoring System
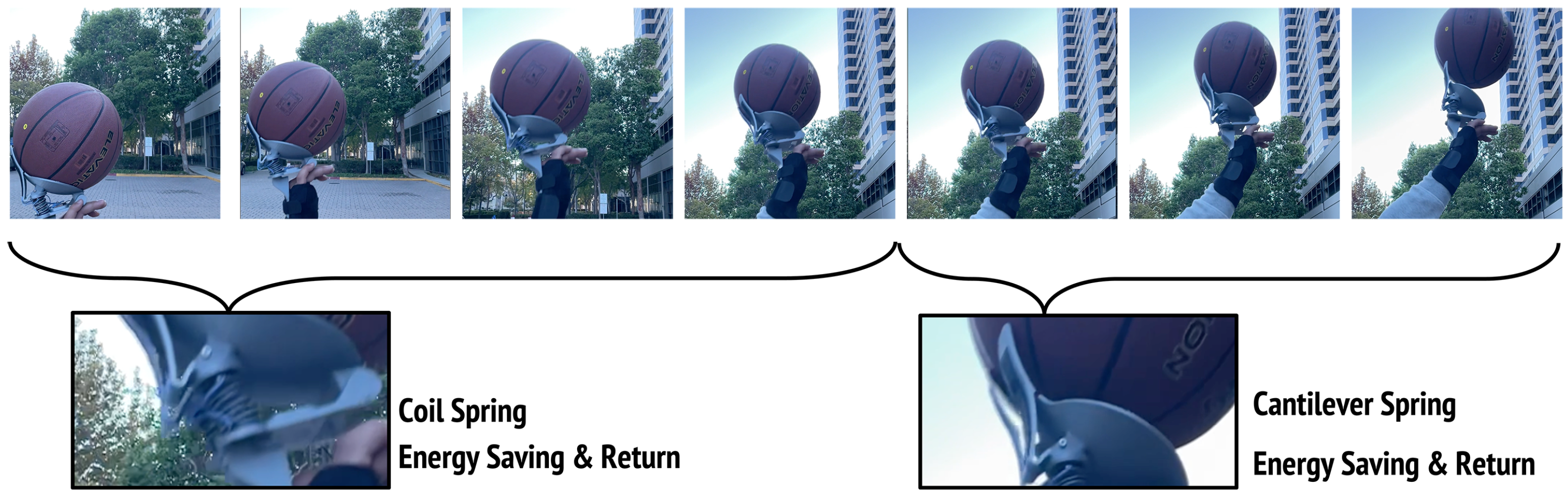
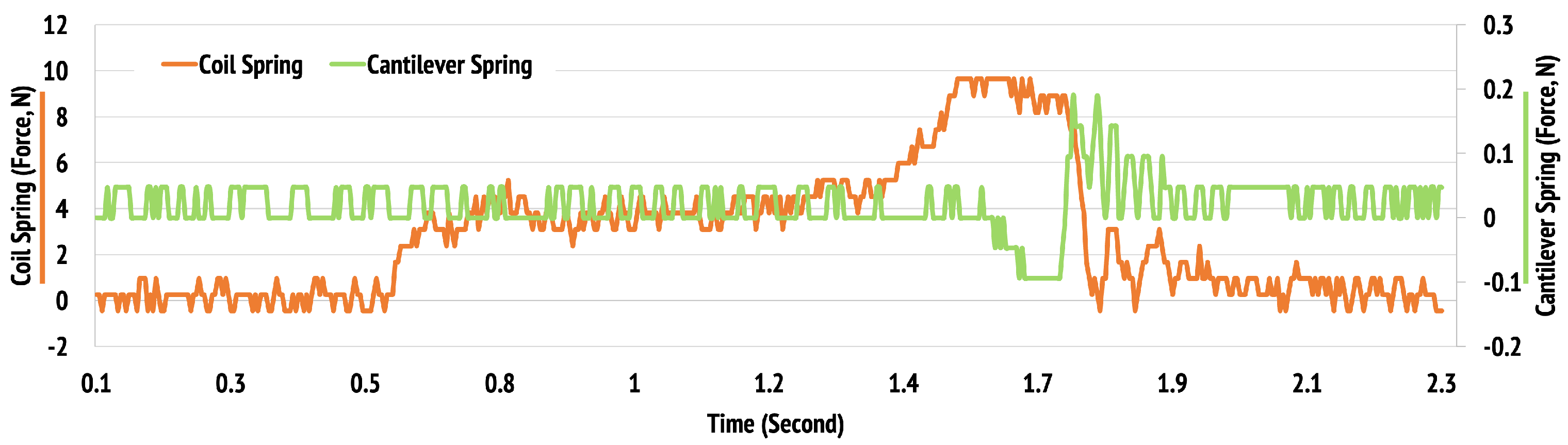
5.4. Evaluations
6. Discussion
6.1. Energy Return in Prosthetics and Beyond
6.2. Diverse Materials Available for Advanced 3D Printing
6.3. 3D Printed Components
6.4. Limitations
6.5. Future Work
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ziegler-Graham, K.; MacKenzie, E.J.; Ephraim, P.L.; Travison, T.G.; Brookmeyer, R. Estimating the Prevalence of Limb Loss in the United States: 2005 to 2050. Arch. Phys. Med. Rehabil. 2008, 89, 422–429. [Google Scholar] [CrossRef] [PubMed]
- O&P Almanac. Amputation Data from Community Hospitals; Technical report; The American Orthotic and Prosthetic Association: Alexandria, VA, USA, 2016. [Google Scholar]
- Walker, J.; Coburn, T.; Cottle, W.; Burke, C.; Talwalkar, V. Recreational Terminal Devices for Children With Upper Extremity Amputations. J. Pediatr. Orthop. 2008, 28, 271–273. [Google Scholar] [CrossRef] [PubMed]
- Wright, T.W.; Hagen, A.D.; Wood, M.B. Prosthetic usage in major upper extremity amputations. J. Hand Surg. 1995, 20, 619–622. [Google Scholar] [CrossRef]
- TRS. TRS Prosthetics Sports; TRS: Boulder, CO, USA, 2022. [Google Scholar]
- Bragaru, M.; Dekker, R.; Geertzen, J.H.B.; Dijkstra, P.U. Amputees and Sports. Sport. Med. 2011, 41, 721–740. [Google Scholar] [CrossRef]
- Farserotu, J.; Decotignie, J.D.; Baborowski, J.; Volpe, P.N.; Quirós, C.R.; Kopta, V.; Enz, C.; Lacour, S.; Michaud, H.; Martuzzi, R.; et al. Tactile Prosthetics in WiseSkin. In Proceedings of the 2015 Design, Automation & Test in Europe Conference & Exhibition, Grenoble, France, 9–13 March 2015; EDA Consortium: San Jose, CA, USA, 2015; pp. 1695–1697. [Google Scholar]
- TRS. Body Powered Prosthetic Simulator; TRS: Boulder, CO, USA, 2022. [Google Scholar]
- Bandyopadhyay, A.; Heer, B. Additive manufacturing of multi-material structures. Mater. Sci. Eng. R Rep. 2018, 129, 1–16. [Google Scholar] [CrossRef]
- Otte, A. 3D Computer-Aided Design Reconstructions and 3D Multi-Material Polymer Replica Printings of the First “Iron Hand” of Franconian Knight Gottfried (Götz) von Berlichingen (1480–1562): An Overview. Prosthesis 2020, 2, 27. [Google Scholar] [CrossRef]
- Humphreys, B.; Ruseski, J. The Size and Scope of the Sports Industry in the United States; Technical Report 0811; International Association of Sports Economists and North American Association of Sports Economists: Limoges, France, 2008. [Google Scholar]
- Okubo, H.; Hubbard, M. Kinematics of Arm Joint Motions in Basketball Shooting. Procedia Eng. 2015, 112, 443–448. [Google Scholar] [CrossRef] [Green Version]
- Blickhan, R. The spring-mass model for running and hopping. J. Biomech. 1989, 22, 1217–1227. [Google Scholar] [CrossRef]
- Phillips, V. Flex-Foot Prosthetics; MIT: Cambridge, MA, USA, 2007. [Google Scholar]
- Fuss, F.K. Closing the gap through technology. Sport. Technol. 2008, 1, 169–171. [Google Scholar] [CrossRef]
- Nolan, L. Carbon fibre prostheses and running in amputees: A review. Foot Ankle Surg. 2008, 14, 125–129. [Google Scholar] [CrossRef]
- Houdijk, H.; Wezenberg, D.; Hak, L.; Cutti, A.G. Energy storing and return prosthetic feet improve step length symmetry while preserving margins of stability in persons with transtibial amputation. J. Neuroeng. Rehabil. 2018, 15, 76. [Google Scholar] [CrossRef] [PubMed]
- Rodrigues, T.; Ferreira, J.A.F.; Ramos, A. Study of a Passive Orthosis for Reducing the Load Transfer in the Hip Joint. Prosthesis 2022, 4, 624–635. [Google Scholar] [CrossRef]
- Össur. Flex-Foot Cheetah; Össur: Reykjavik, Iceland, 2022. [Google Scholar]
- Childers, W.L.; Takahashi, K.Z. Increasing prosthetic foot energy return affects whole-body mechanics during walking on level ground and slopes. Sci. Rep. 2018, 8, 5354. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ray, S.F.; Wurdeman, S.R.; Takahashi, K.Z. Prosthetic energy return during walking increases after 3 weeks of adaptation to a new device. J. Neuroeng. Rehabil. 2018, 15, 6. [Google Scholar] [CrossRef] [Green Version]
- Bowen, J.; Hausselle, J.; Gonzalez, R. A Low-Cost Customizable Prosthetic Foot with Energy Return Capabilities. Prosthetics Orthot. Open J. 2018, 2, 1–5. [Google Scholar]
- Comotti, C.; Regazzoni, D.; Rizzi, C.; Vitali, A. Multi-Material Design and 3D Printing Method of Lower Limb Prosthetic Sockets. In Proceedings of the 3rd 2015 Workshop on ICTs for Improving Patients Rehabilitation Research Techniques, Lisbon, Portugal, 1–2 October 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 42–45. [Google Scholar] [CrossRef]
- Owen, J. Enabling The Future; e-NABLE: Bellingham, WA, USA, 2022. [Google Scholar]
- Schmidt, R.; Coons, G.; Chen, V.; Gmeiner, T.; Ratto, M. 3D-Printed Prosthetics for the Developing World. In Proceedings of the SIGGRAPH 2015: Studio, Los Angeles, CA, USA, 9–13 August 2015; Association for Computing Machinery: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Open Bionics. Hero Arm; Open Bionics: Denver, CO, USA, 2022. [Google Scholar]
- UCLA 3D4E. Spock-Prosthetic Basketball Hand; UCLA: Los Angeles, CA, USA, 2016. [Google Scholar]
- Chen, J.; Zhu, Y.; Huang, J.; Zhang, J.; Pan, D.; Zhou, J.; Ryu, J.E.; Umar, A.; Guo, Z. Advances in Responsively Conductive Polymer Composites and Sensing Applications. Polym. Rev. 2021, 61, 157–193. [Google Scholar] [CrossRef]
- Leigh, S.J.; Bradley, R.J.; Purssell, C.P.; Billson, D.R.; Hutchins, D.A. A Simple, Low-Cost Conductive Composite Material for 3D Printing of Electronic Sensors. PLoS ONE 2012, 7, e49365. [Google Scholar] [CrossRef]
- Grønborg, F.; Zsurzsan, T.G.; Daugaard, A.E.; Spangenberg, J.; Pedersen, D.B. Conductive Compliant Mechanisms: Geometric tuning of 3D printed flexural sensors. Addit. Manuf. Lett. 2022, 3, 100088. [Google Scholar] [CrossRef]
- Rocha, R.P.; Lopes, P.A.; de Almeida, A.T.; Tavakoli, M.; Majidi, C. Fabrication and characterization of bending and pressure sensors for a soft prosthetic hand. J. Micromech. Microeng. 2018, 28, 034001. [Google Scholar] [CrossRef]
- Wolterink, G.; Sanders, R.; van Beijnum, B.J.; Veltink, P.; Krijnen, G. A 3D-Printed Soft Fingertip Sensor for Providing Information about Normal and Shear Components of Interaction Forces. Sensors 2021, 21, 4271. [Google Scholar] [CrossRef]
- Gong, J.; Seow, O.; Honnet, C.; Forman, J.; Mueller, S. MetaSense: Integrating Sensing Capabilities into Mechanical Metamaterial. In Proceedings of the The 34th Annual ACM Symposium on User Interface Software and Technology, Virtual Event, 10–14 October 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 1063–1073. [Google Scholar] [CrossRef]
- Greenspan, B.; Danielescu, A. Designing Low-Cost Sports Prosthetics with Advanced 3D Printing Techniques. In Proceedings of the Adjunct Publication of the 33rd Annual ACM Symposium on User Interface Software and Technology, Virtual Event, 20–23 October 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 126–128. [Google Scholar] [CrossRef]
- Garanger, K.; Khamvilai, T.; Feron, E. 3D Printing of a Leaf Spring: A Demonstration of Closed-Loop Control in Additive Manufacturing. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August2018; pp. 465–470. [Google Scholar] [CrossRef] [Green Version]
- Faber, J.A.; Arrieta, A.F.; Studart, A.R. Bioinspired spring origami. Science 2018, 359, 1386–1391. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zolfagharian, A.; Lakhi, M.; Ranjbar, S.; Tadesse, Y.; Bodaghi, M. 3D printing non-assembly compliant joints for soft robotics. Results Eng. 2022, 15, 100558. [Google Scholar] [CrossRef]
- He, L.; Peng, H.; Lin, M.; Konjeti, R.; Guimbretière, F.; Froehlich, J.E. Ondulé: Designing and Controlling 3D Printable Springs. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology, New Orleans, LA, USA, 20–23 October 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 739–750. [Google Scholar] [CrossRef]
- Gao, W.; Zhang, Y.; Nazzetta, D.C.; Ramani, K.; Cipra, R.J. RevoMaker: Enabling Multi-Directional and Functionally-Embedded 3D Printing Using a Rotational Cuboidal Platform. In Proceedings of the 28th Annual ACM Symposium on User Interface Software & Technology, Charlotte, NC, USA, 8–11 November 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 437–446. [Google Scholar] [CrossRef]
- Goudswaard, M.; Abraham, A.; da Rocha, B.; Andersen, K.; Liang, R.H. FabriClick: Interweaving Pushbuttons into Fabrics Using 3D Printing and Digital Embroidery. In Proceedings of the 2020 ACM Designing Interactive Systems Conference, Eindhoven, The Netherlands, 6–10 July 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 379–393. [Google Scholar] [CrossRef]
- Budynas, R.; Nisbett, K. Shigleys Mechanical Engineering Design; McGraw-Hill: New York, NY, USA, 2019; pp. 1–1059. [Google Scholar]
- Yoshii, Y.; Yuine, H.; Kazuki, O.; Tung, W.l.; Ishii, T. Measurement of wrist flexion and extension torques in different forearm positions. Biomed. Eng. Online 2015, 14, 115. [Google Scholar] [CrossRef] [PubMed]
- Torres, J.; Cotelo, J.; Karl, J.; Gordon, A.P. Mechanical Property Optimization of FDM PLA in Shear with Multiple Objectives. JOM 2015, 67, 1183–1193. [Google Scholar] [CrossRef]
- Olesnavage Kathryn, M.; Winter, A.G.V. Analysis of Rollover Shape and Energy Storage and Return in Cantilever Beam-Type Prosthetic Feet. In Proceedings of the ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Buffalo, NY, USA, 17–20 August 2014. [Google Scholar] [CrossRef] [Green Version]
- Saggio, G.; Orengo, G. Flex sensor characterization against shape and curvature changes. Sens. Actuators A Phys. 2018, 273, 221–231. [Google Scholar] [CrossRef]
- Brancazio, P.J. Physics of basketball. Am. J. Phys. 1981, 49, 356–365. [Google Scholar] [CrossRef]
- Podmenik, N.; Supej, M.; Čoh, M.; Erculj, F. The effect of shooting range on the dynamics of limbs angular velocities of the basketball shot. Kinesiology 2017, 49, 92–100. [Google Scholar] [CrossRef] [Green Version]
- Chiang, H.Y.; Liu, Y.T. Coordination of Basketball Shooting Movement of Different Skill Level Players. In Proceedings of the 24th International Symposium on Biomechanics in Sports, Salzburg, Austria, 14–18 July 2006; pp. 1–4. [Google Scholar]
- Hung, C.F.; Chen, C.C.; Lin, S.H.; Chung, T.K. Finger and Palm Dynamic Pressure Monitoring for Basketball Shooting. J. Sens. 2017, 2017, 9352410. [Google Scholar] [CrossRef] [Green Version]
- Okubo, H.; Hubbard, M. Rebounds of basketball field shots. Sport. Eng. 2014, 16, 43–54. [Google Scholar] [CrossRef]
- Rojas, F.; Cepero, M.; Ona, A.; Gutierrez, M. Kinematic Adjustments in the Basketball Jump Shot against an Opponent; Ergonomics: London, UK, 2000; pp. 1651–1660. [Google Scholar] [CrossRef] [Green Version]
- Malone, L.A.; Gervais, P.L.; Steadward, R.D. Shooting mechanics related to player classification and free throw success in wheelchair basketball. J. Rehabil. Res. Dev. 2002, 39-6, 701–709. [Google Scholar]
- Thatte, N.; Geyer, H. Toward Balance Recovery With Leg Prostheses Using Neuromuscular Model Control. IEEE Trans. Biomed. Eng. 2016, 63, 904–913. [Google Scholar] [CrossRef] [PubMed]
- Zastrow, M. 3D printing gets bigger, faster and stronger. Nature 2020, 578, 20–23. [Google Scholar] [CrossRef] [PubMed]
- Carbon. Rethinking Foam—The Carbon Lattice Innovation; Carbon, Inc.: Redwood City, CA, USA, 2022. [Google Scholar]
- Carey, S.L.; Lura, D.J.; Highsmith, M.J. Differences in myoelectric and body-powered upper-limb prostheses: Systematic literature review. J. Rehabil. Res. Dev. 2015, 52, 247–262. [Google Scholar] [CrossRef] [PubMed]
- Ultimaker. PLA-Data Sheet; Ultimaker: Utrecht, Netherlands, 2022. [Google Scholar]
- Ultimaker. TPU 95A-Data Sheet; Ultimaker: Utrecht, Netherlands, 2022. [Google Scholar]
- Zelik, K.E.; Collins, S.H.; Adamczyk, P.G.; Segal, A.D.; Klute, G.K.; Morgenroth, D.C.; Hahn, M.E.; Orendurff, M.S.; Czerniecki, J.M.; Kuo, A.D. Systematic Variation of Prosthetic Foot Spring Affects Center-of-Mass Mechanics and Metabolic Cost During Walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 411–419. [Google Scholar] [CrossRef]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.W.; Greenspan, B.; Tabb, T.; Gallo, E.; Danielescu, A. 3D Printed Energy Return Elements for Upper Limb Sports Prosthetics. Prosthesis 2023, 5, 13-34. https://doi.org/10.3390/prosthesis5010002
Park JW, Greenspan B, Tabb T, Gallo E, Danielescu A. 3D Printed Energy Return Elements for Upper Limb Sports Prosthetics. Prosthesis. 2023; 5(1):13-34. https://doi.org/10.3390/prosthesis5010002
Chicago/Turabian StylePark, Jung Wook, Ben Greenspan, Taylor Tabb, Eric Gallo, and Andreea Danielescu. 2023. "3D Printed Energy Return Elements for Upper Limb Sports Prosthetics" Prosthesis 5, no. 1: 13-34. https://doi.org/10.3390/prosthesis5010002