

Deep Learning Based Burnt Area Mapping Using Sentinel 1 for the Santa Cruz Mountains Lightning Complex (CZU) and Creek Fires 2020


Abstract
:1. Introduction
1.1. Multispectral Remote Sensing for Burnt Area Monitoring
1.2. Active Sensing for Burn Area Monitoring
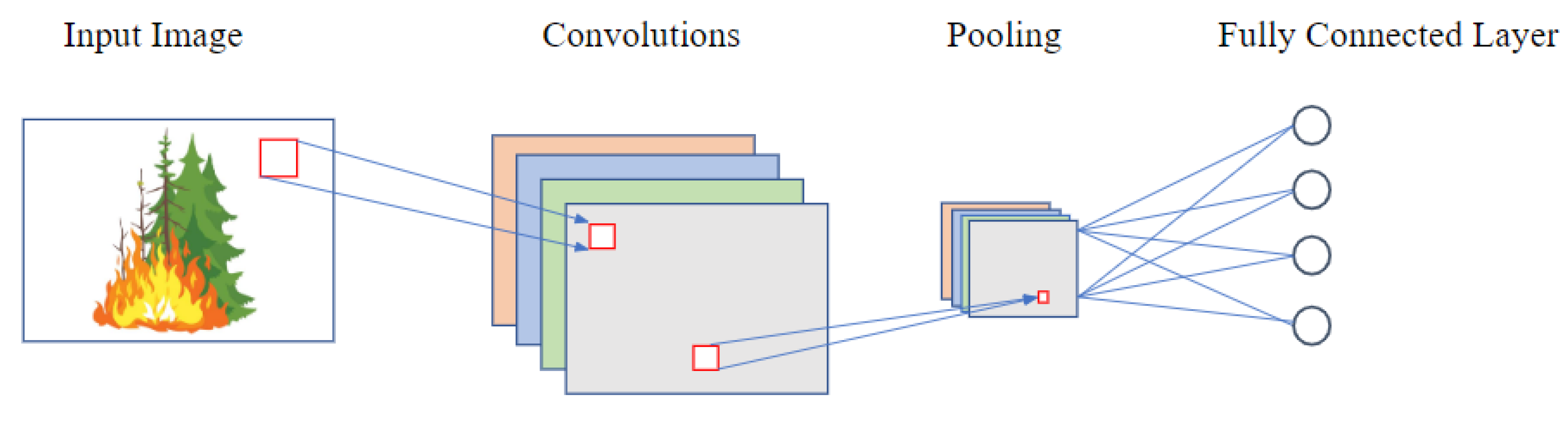
1.2.1. Convolutional Neural Networks
1.2.2. Image Segmentation and CNNs
1.2.3. Encoder-Decoder Architecture
1.3. CNNs and SAR in Burnt Area Mapping
2. Materials and Methods
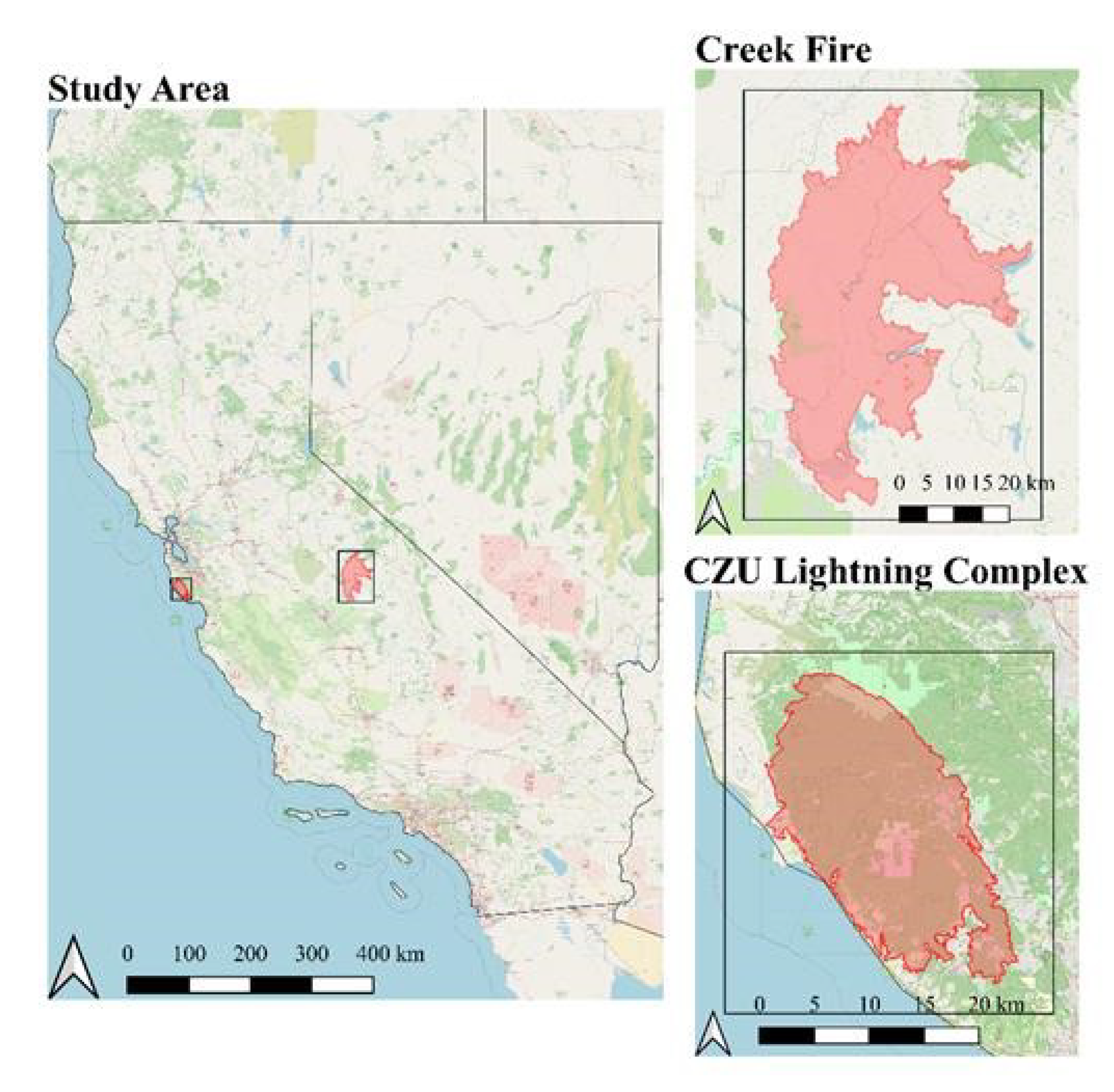
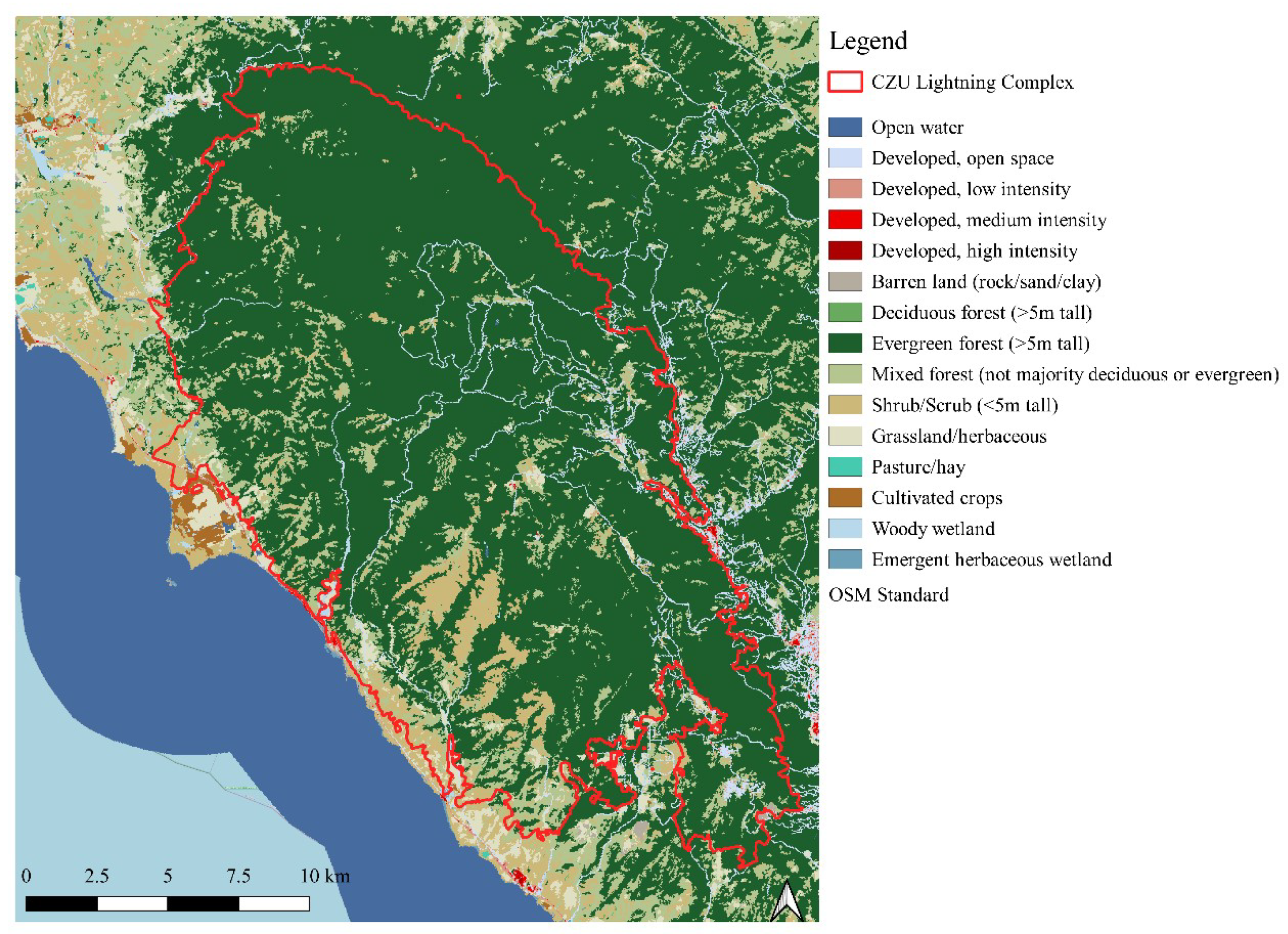
2.1. Study Area
2.2. Data
2.2.1. Copernicus Sentinel-1 SAR
2.2.2. Reference MSI Imagery
2.2.3. DEM
2.2.4. Fire Perimeters
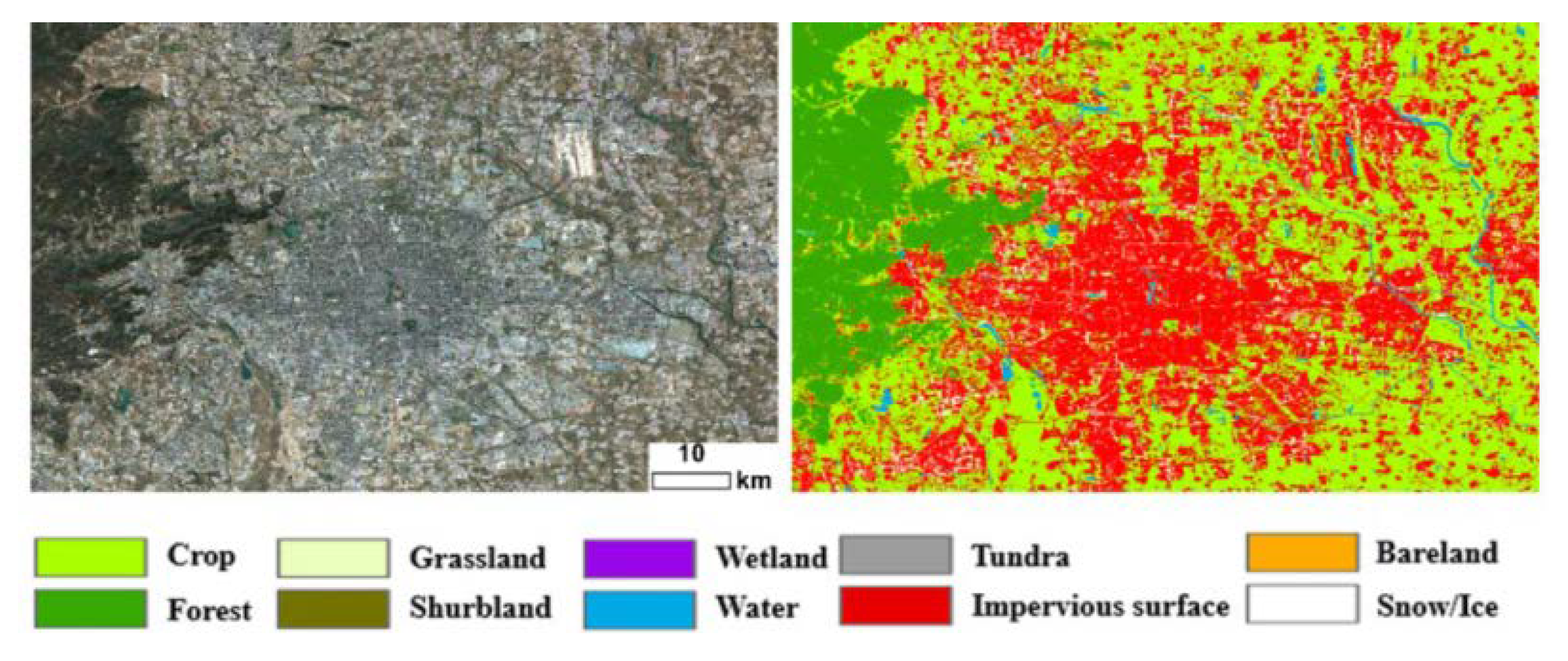
2.2.5. Land Cover Data
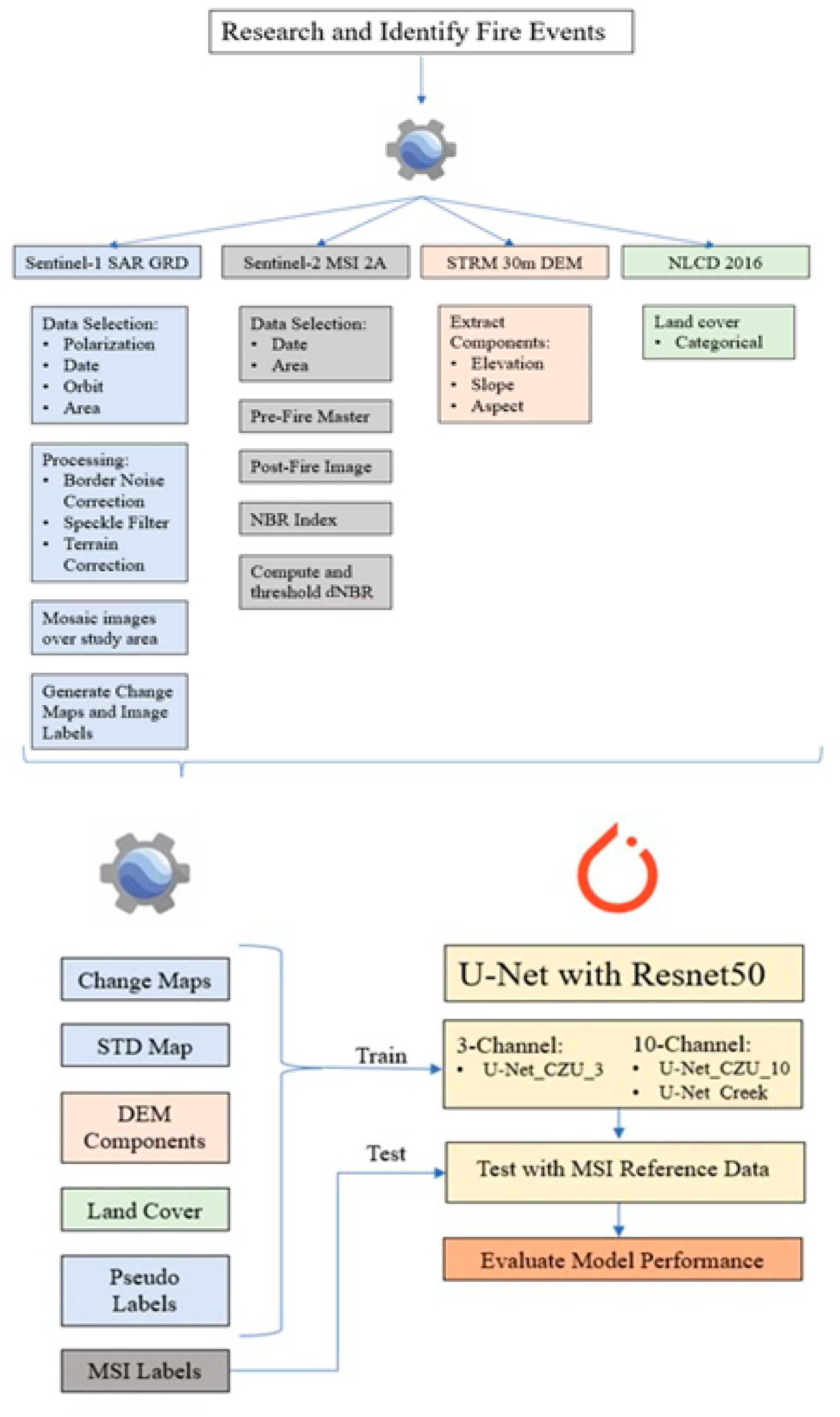
2.3. Methods
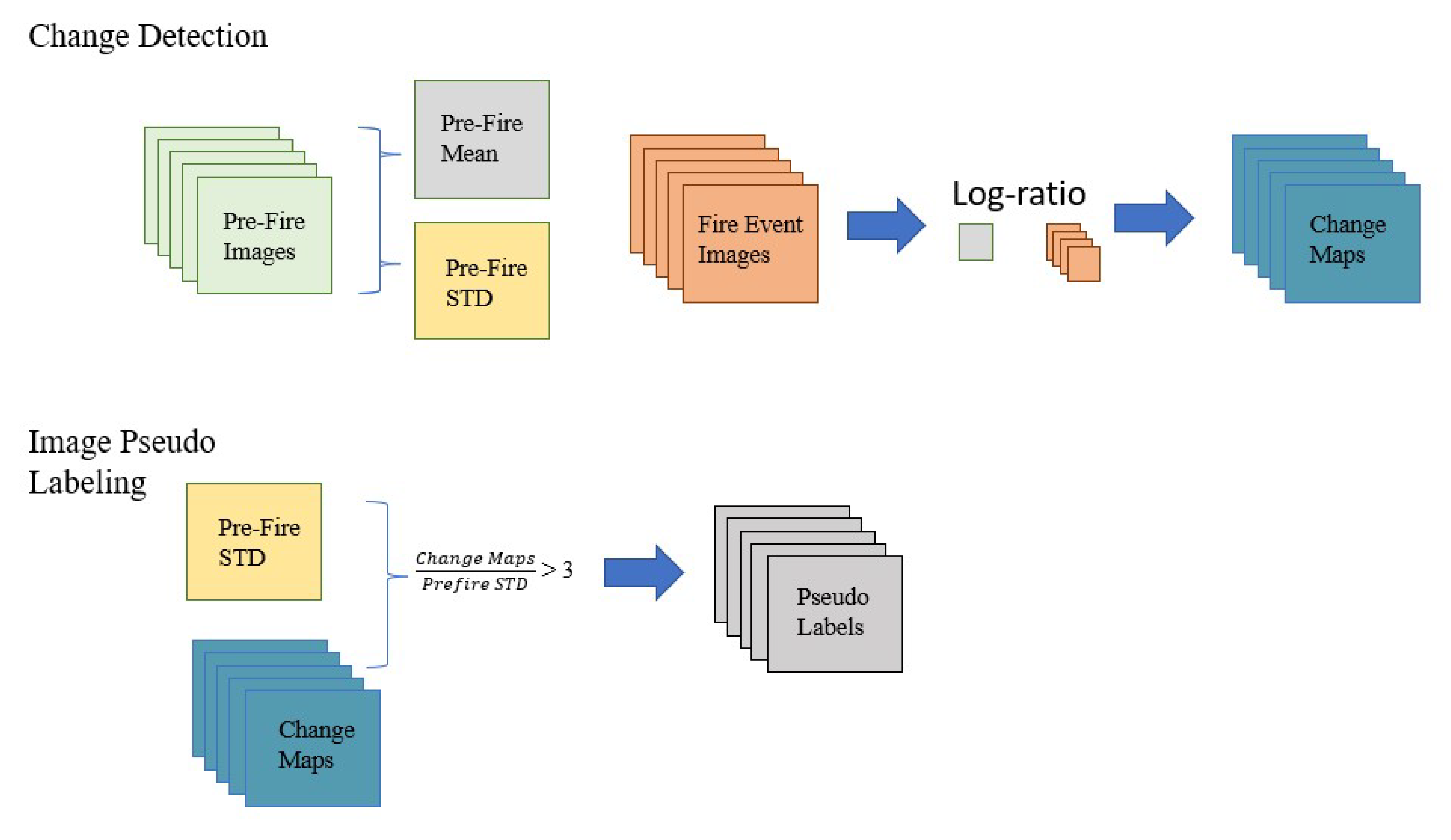
2.3.1. Change Detection and Image Pseudo Labeling
2.3.2. MSI Reference Images
2.3.3. U-Net Input Data Summary
2.3.4. Input Dataset Manipulation
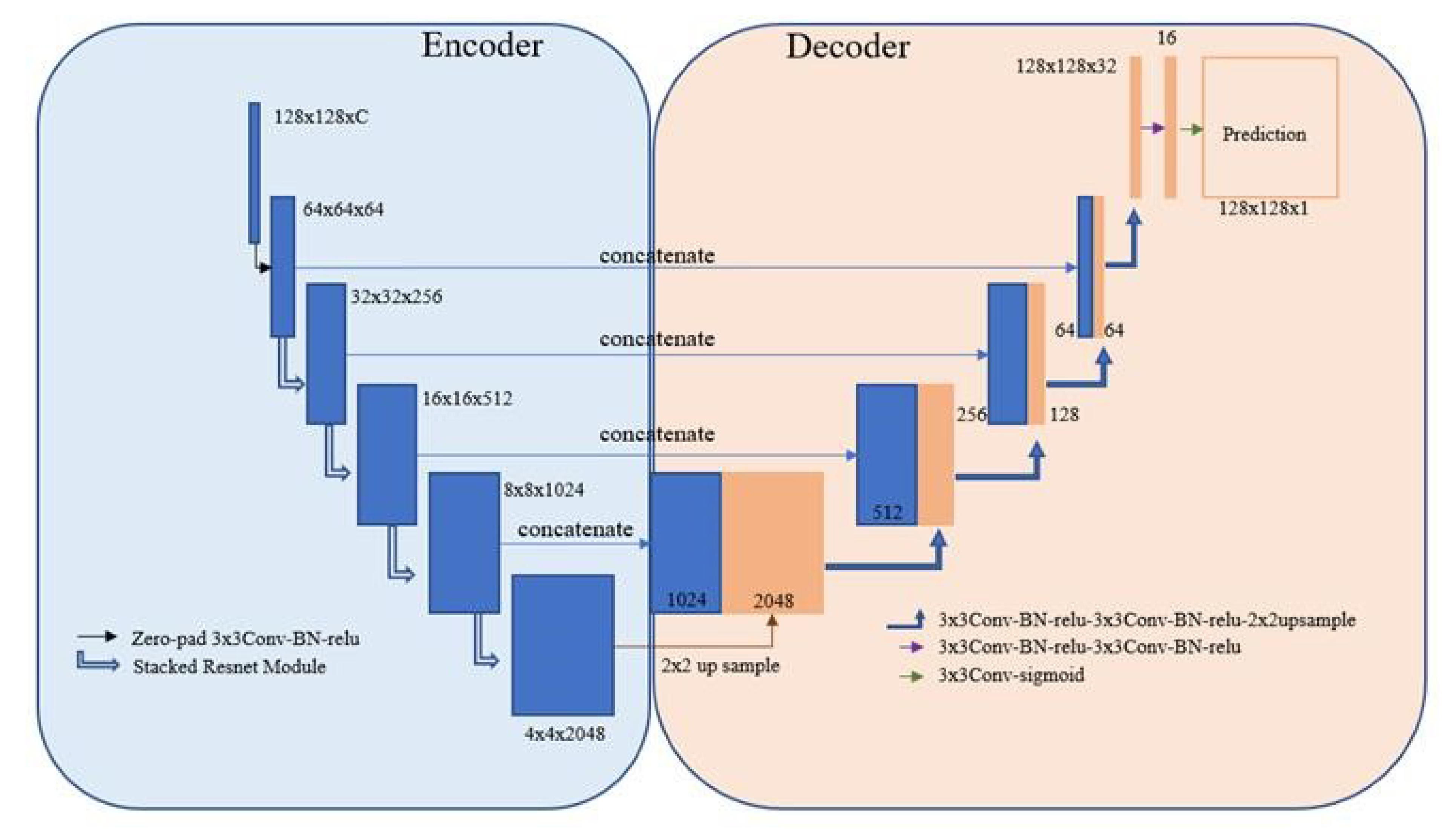
2.3.5. U-Net with ResNet
2.3.6. Models
- The U-Net model is loaded as an untrained model with randomly initialized weights for each of the 10 channels. The model is then trained on the 11,400 image patches specific to the CZU BA of interest. The model is tested on 725 images representing the final BA at the conclusion of the fire.
- Take only the dVV, dVH, dVV/dVH SAR polarizations as channel inputs to a 3-channel U-Net using the ImageNet pre-trained weights. It is then trained on 11,400 image patches and tested on the 725 image patches of the final BA perimeter.
- Load the weights from U-Net CZU_10 and continue training the model on a subset of images from the Creek fire. This is intended to learn from the initial training and generalize it to an area of similar land cover and topography in California. Investigate effects of additional land cover and topography channels in transfer learning.
2.3.7. Model Training
2.3.8. Model Evaluation
3. Results
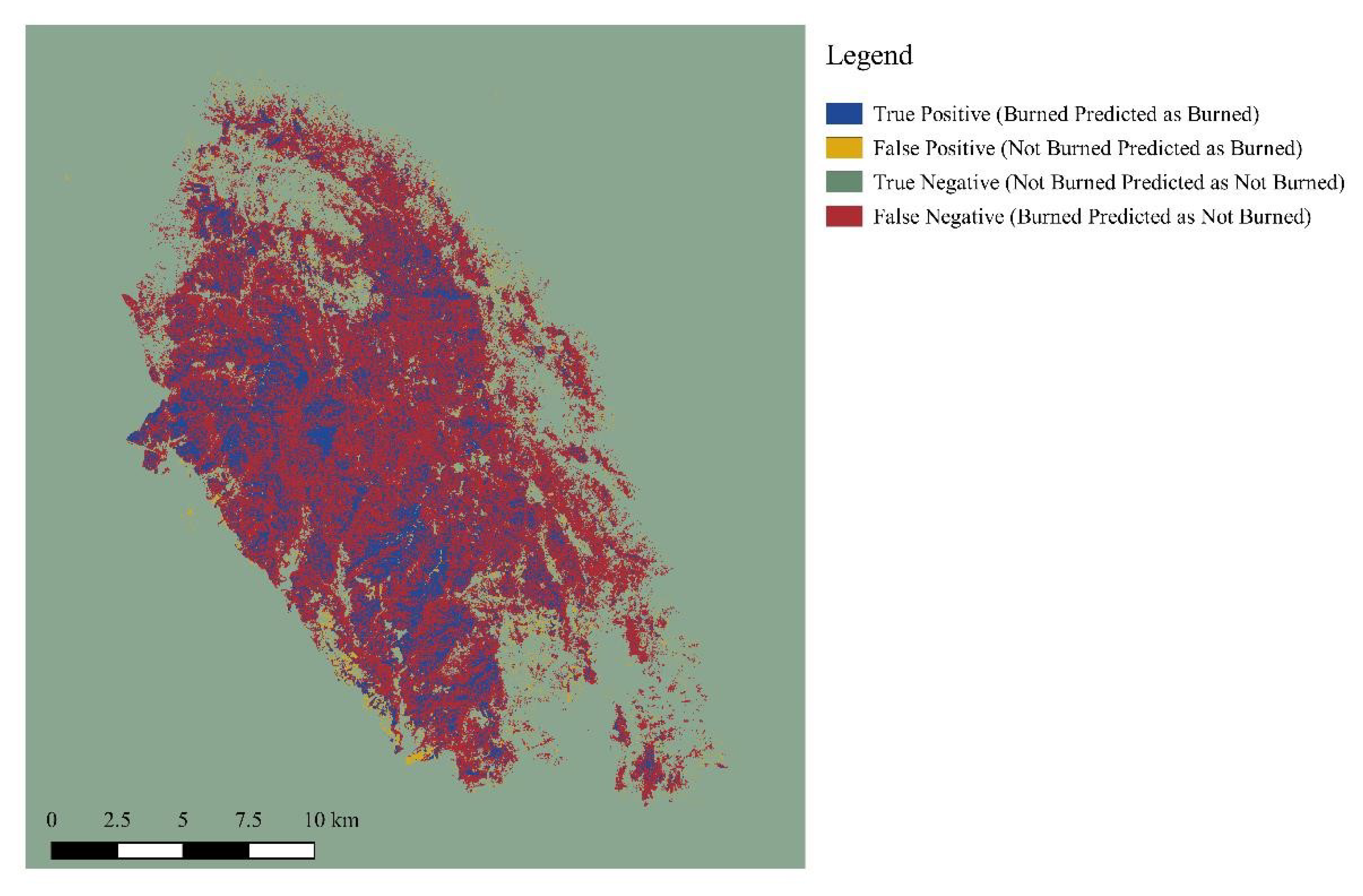
3.1. CZU Lightning Complex
3.1.1. Land Cover Effects
3.1.2. Topography Effects
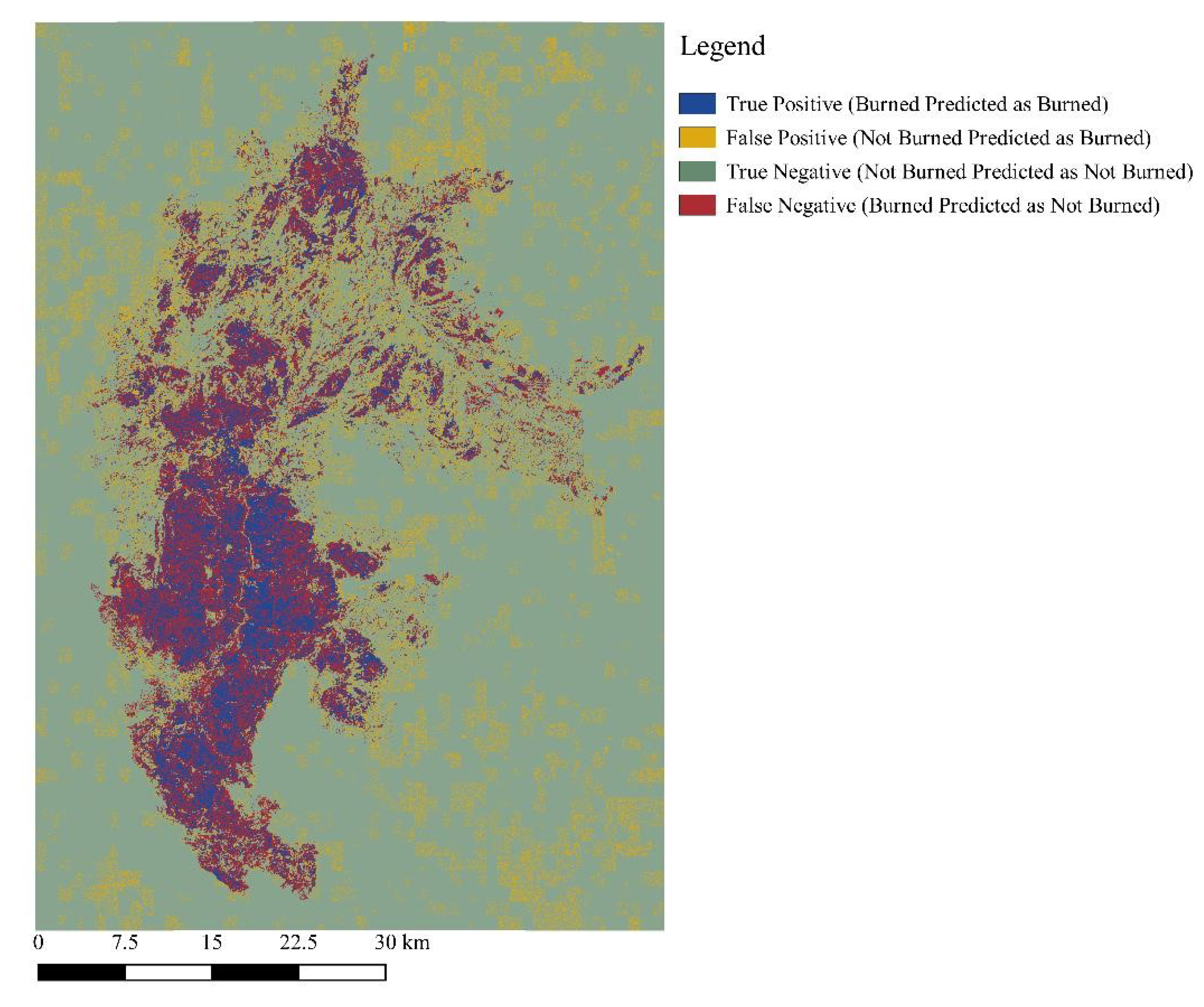
3.2. Transfer Learning of the Creek Fire
4. Discussion
4.1. Data Labeling
4.2. U-Net CZU Model Successes
4.3. U-Net Transfer Challenges
4.4. U-Net Model Limitations and Implications for Future Works
5. Conclusions
- Automatically generated pseudo labels used in tandem with an encoder-decoder network is an effective method to classify BAs during a fire event;
- Adding additional channels of topography and land cover affects the result of deep learning prediction using SAR imagery. In the case of this study, the effect was slightly negative;
- Transfer learning for BA monitoring is not as effective as first-time learning.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stefanidis, S.; Alexandridis, V.; Spalevic, V.; Mincato, R.L. Wildfire Effects on Soil Erosion Dynamics: The Case of 2021 Megafires in Greece. Agric. For. 2022, 68, 49–63. [Google Scholar] [CrossRef]
- Silvestro, R.; Saulino, L.; Cavallo, C.; Allevato, E.; Pindozzi, S.; Cervelli, E.; Conti, P.; Mazzoleni, S.; Saracino, A. The Footprint of Wildfires on Mediterranean Forest Ecosystem Services in Vesuvius National Park. Fire 2021, 4, 95. [Google Scholar] [CrossRef]
- Patel, K. Six Trends to Know about Fire Season in the Western U.S., Climate Change: Vital Signs of the Planet. 2018. Available online: https://climate.nasa.gov/blog/2830/six-trends-toknow-about-fire-season-in-the-western-us/ (accessed on 10 June 2021).
- Anguiano, D. California’s Wildfire Hell: How 2020 Became the State’s Worst ever Fire Season, the Guardian. 2020. Available online: http://www.theguardian.com/usnews/2020/dec/30/california-wildfires-north-complex-record (accessed on 10 June 2021).
- Schroeder, W.; Prins, E.; Giglio, L.; Csiszar, I.; Schmidt, C.; Morisette, J.; Morton, D. Validation of GOES and MODIS Active Fire Detection Products Using ASTER and ETM+ Data. Remote Sens. Environ. 2008, 112, 2711–2726. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I.A. The New VIIRS 375 m Active Fire Detection Data Product: Algorithm Description and Initial Assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Alvarez, F.; Han, T.; Rogan, J.; Hawkes, B. Characterizing Boreal Forest Wildfire with Multi-Temporal Landsat and LIDAR Data. Remote Sens. Environ. 2009, 113, 1540–1555. [Google Scholar] [CrossRef]
- Roy, D.P.; Huang, H.; Boschetti, L.; Giglio, L.; Yan, L.; Zhang, H.H.; Li, Z. Landsat-8 and Sentinel-2 Burned Area Mapping—A Combined Sensor Multi-Temporal Change Detection Approach. Remote Sens. Environ. 2019, 231, 111254. [Google Scholar] [CrossRef]
- Ban, Y.; Zhang, P.; Nascetti, A.; Bevington, A.R.; Wulder, M.A. Near Real-Time Wildfire Progression Monitoring with Sentinel-1 SAR Time Series and Deep Learning. Sci. Rep. 2020, 10, 1322. [Google Scholar] [CrossRef] [Green Version]
- Gong, M.; Zhao, J.; Liu, J.; Miao, Q.; Jiao, L. Change Detection in Synthetic Aperture Radar Images Based on Deep Neural Networks. IEEE Trans. Neural Networks Learn. Syst. 2016, 27, 125–138. [Google Scholar] [CrossRef]
- Belenguer-Plomer, M.A.; Tanase, M.A.; Fernandez-Carrillo, A.; Chuvieco, E. Burned Area Detection and Mapping Using Sentinel-1 Backscatter Coefficient and Thermal Anomalies. Remote Sens. Environ. 2019, 233, 111345. [Google Scholar] [CrossRef]
- Hoeser, T.; Kuenzer, C. Object Detection and Image Segmentation with Deep Learning on Earth Observation Data: A Review-Part I: Evolution and Recent Trends. Remote Sens. 2020, 12, 1667. [Google Scholar] [CrossRef]
- Sparks, A.M.; Boschetti, L.; Smith, A.M.S.; Tinkham, W.T.; Lannom, K.O.; Newingham, B.A. An Accuracy Assessment of the MTBS Burned Area Product for Shrub–Steppe Fires in the Northern Great Basin, United States. Int. J. Wildl. Fire 2014, 24, 70–78. [Google Scholar] [CrossRef]
- Hu, B.; Xu, Y.; Huang, X.; Cheng, Q.; Ding, Q.; Bai, L.; Li, Y. Improving Urban Land Cover Classification with Combined Use of Sentinel-2 and Sentinel-1 Imagery. ISPRS Int. J. Geo-Inf. 2021, 10, 533. [Google Scholar] [CrossRef]
- Hu, X.; Ban, Y.; Nascetti, A. Uni-Temporal Multispectral Imagery for Burned Area Mapping with Deep Learning. Remote Sens. 2021, 13, 1509. [Google Scholar] [CrossRef]
- Yousif, O.; Ban, Y. Improving SAR-Based Urban Change Detection by Combining MAP-MRF Classifier and Nonlocal Means Similarity Weights. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4288–4300. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef] [Green Version]
- Reiche, J.; Verbesselt, J.; Hoekman, D.; Herold, M. Fusing Landsat and SAR Time Series to Detect Deforestation in the Tropics. Remote Sens. Environ. 2015, 156, 276–293. [Google Scholar] [CrossRef]
- Verhegghen, A.; Eva, H.; Ceccherini, G.; Achard, F.; Gond, V.; Gourlet-Fleury, S.; Cerutti, P.O. The Potential of Sentinel Satellites for Burnt Area Mapping and Monitoring in the Congo Basin Forests. Remote Sens. 2016, 8, 986. [Google Scholar] [CrossRef] [Green Version]
- Brown, A.R.; Petropoulos, G.P.; Ferentinos, K.P. Appraisal of the Sentinel-1 & 2 Use in a Large-Scale Wildfire Assessment: A Case Study from Portugal’s Fires of 2017. Appl. Geogr. 2018, 100, 78–89. [Google Scholar] [CrossRef]
- Zhang, P.; Ban, Y.; Nascetti, A. Learning U-Net without forgetting for near realtime wildfire monitoring by the fusion of SAR and optical time series. Remote Sens. Environ. 2021, 261, 112467. [Google Scholar] [CrossRef]
- Szpakowski, D.M.; Jensen, J.L.R. A Review of the Applications of Remote Sensing in Fire Ecology. Remote Sens. 2019, 11, 2638. [Google Scholar] [CrossRef]
- Miller, J.D.; Thode, A.E. Quantifying burn severity in a heterogeneous landscape with a relative version of the delta Normalized Burn Ratio (dNBR). Remote Sens. Environ. 2007, 109, 66–80. [Google Scholar] [CrossRef]
- Stroppiana, D.; Azar, R.; Calò, F.; Pepe, A.; Imperatore, P.; Boschetti, M.; Silva, J.M.N.; Brivio, P.A.; Lanari, R. Integration of Optical and SAR Data for Burned Area Mapping in Mediterranean Regions. Remote Sens. 2015, 7, 1320–1345. [Google Scholar] [CrossRef] [Green Version]
- Tanase, M.A.; Santoro, M.; De La Riva, J.; Pérez-Cabello, F.; Le Toan, T. Sensitivity of X-, C-, and L-Band SAR Backscatter to Burn Severity in Mediterranean Pine Forests. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3663–3675. [Google Scholar] [CrossRef]
- Knopp, L.; Wieland, M.; Rättich, M.; Martinis, S. A Deep Learning Approach for Burned Area Segmentation with Sentinel-2 Data. Remote Sens. 2020, 12, 2422. [Google Scholar] [CrossRef]
- Yao, J.; Jin, S. Multi-Category Segmentation of Sentinel-2 Images Based on the Swin UNet Method. Remote Sensing 2022, 14, 3382. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. arXiv 2015, arXiv:1505.04597. Available online: http://arxiv.org/abs/1505.04597 (accessed on 29 June 2021).
- Belenguer-Plomer, M.A.; Tanase, M.A.; Chuvieco, E.; Bovolo, F. CNN-Based Burned Area Mapping Using Radar and Optical Data. Remote Sens. Environ. 2021, 260, 112468. [Google Scholar] [CrossRef]
- ESA Sentinel-1 (2021) ESA. Available online: https://sentinels.copernicus.eu/web/sentinel/missions/sentinel-1 (accessed on 11 August 2021).
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale Geospatial Analysis for Everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Stefanidis, S.; Alexandridis, V.; Ghosal, K. Assessment of Water-Induced Soil Erosion as a Threat to Natura 2000 Protected Areas in Crete Island, Greece. Sustainability 2022, 14, 2738. [Google Scholar] [CrossRef]
- Alexakis, D.D.; Manoudakis, S.; Agapiou, A.; Polykretis, C. Towards the Assessment of Soil-Erosion-Related C-Factor on European Scale Using Google Earth Engine and Sentinel-2 Images. Remote Sens. 2021, 13, 5019. [Google Scholar] [CrossRef]
- Mullissa, A.; Vollrath, A.; Odongo-Braun, C.; Slagter, B.; Balling, J.; Gou, Y.; Gorelick, N.; Reiche, J. Sentinel-1 SAR Backscatter Analysis Ready Data Preparation in Google Earth Engine. Remote Sens. 2021, 13, 1954. [Google Scholar] [CrossRef]
- Stasolla, M.; Neyt, X. An Operational Tool for the Automatic Detection and Removal of Border Noise in Sentinel-1 GRD Products. Sensors 2018, 18, 3454. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yommy, A.S.; Liu, R.; Wu, A.S. SAR Image Despeckling Using Refined Lee Filter. In Proceedings of the 2015 7th International Conference on Intelligent Human-Machine Systems and Cybernetics—IHMSC, Hangzhou, China, 26–27 August 2015; Volume 2, pp. 260–265. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, RG2004. [Google Scholar] [CrossRef] [Green Version]
- CALFIRE GIS Data. 2021. Available online: https://frap.fire.ca.gov/mapping/gis-data/ (accessed on 1 September 2021).
- Bovolo, F.; Bruzzone, L. A Detail-Preserving Scale-Driven Approach to Change Detection in Multitemporal SAR Images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2963–2972. [Google Scholar] [CrossRef]
- Eidenshink, J.; Schwind, B.; Brewer, K.; Zhu, Z.-L.; Quayle, B.; Howard, S. A Project for Monitoring Trends in Burn Severity. Fire Ecol. 2007, 3, 3–21. [Google Scholar] [CrossRef]
- Kolden, C.A.; Weisberg, P.J. Assessing Accuracy of Manually-Mapped Wildfire Perimeters in Topographically Dissected Areas. Fire Ecol. 2007, 3, 22–31. [Google Scholar] [CrossRef]
- Xulu, S.; Mbatha, N.; Peerbhay, K. Burned Area Mapping over the Southern Cape Forestry Region, South Africa Using Sentinel Data within GEE Cloud Platform. ISPRS Int. J. Geo-Inf. 2021, 10, 511. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Nascetti, A.; Ban, Y.; Gong, M. An Implicit Radar Convolutional Burn Index for Burnt Area Mapping with Sentinel-1 C-Band SAR Data. ISPRS J. Photogramm. Remote Sens. 2019, 158, 50–62. [Google Scholar] [CrossRef]
- Jadon, S. A survey of loss functions for semantic segmentation. In Proceedings of the 2020 IEEE Conference on Computational Intelligence in Bioinformatics and Computational Biology (CIBCB), Via del Mar, Chile, 27–29 October 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Rolnick, D.; Veit, A.; Belongie, S.; Shavit, N. Deep Learning is Robust to Massive Label Noise. arXiv 2018, arXiv:1705.10694. Available online: http://arxiv.org/abs/1705.10694 (accessed on 9 September 2021).
- ICEYE—Earth Online. Available online: https://earth.esa.int/eogateway/missions/iceye (accessed on 13 September 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Creek Fire |
|---|
| Dates Active: 4 September 2020–24 December 2020 |
| Total Area: 379,882.25 Acres |
| Location: 37.19147° N, 119.261175° W |
| Buildings Destroyed: 856 |
| CZU Lightning Complex |
| Dates Active: 16 August 2020–24 September 2020 |
| Total Area: 86,553.5 Acres |
| Location: 37.17162° N 122.22275° W |
| Model | Rate | Epochs | Loss Function | Learning Optimiser | Training Set Size | Test Set Size |
|---|---|---|---|---|---|---|
| U-Net CZU_3 | 0.001 | 240 | Dice Loss | Adam | 11,600 | 725 |
| U-Net CZU_10 | 0.001 | 320 | Dice Loss | Adam | 11,600 | 725 |
| U-Net Transfer | 0.001 | 320 | Dice Loss | Adam | 9699 | 1233 |
| Metric | Formula |
|---|---|
| Sum of all burnt area pixels | True Positive (TP) classified as burnt area |
| Sum of all burnt area pixels | False Positive (FP) classified as unburned area |
| Sum of all unburned area | True Negative (TN) pixels classified as unburned area |
| Sum of all unburned area | False Negative (FN) pixels classified as burnt area |
| Accuracy | |
| Precision | |
| Recall | |
| F1-Score |
| Model | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|
| Zhang Ban and Nascetti (2021) 1 | 0.86 | 095 | 0.45 | 0.60 |
| Belenguer-Plomer (2021) 2 | - | - | - | 0.46 |
| Model | Accuracy | Precision | Recall | F1-score |
|---|---|---|---|---|
| Zhang, Ban and Nascetti (2021) 1 | 0.862 | 0.947 | 0.448 | 0.604 |
| Belenguer-Plomer (2021) 2 | N/a | N/a | N/a | 0.460 |
| U-Net_CZU_3 | 0.813 | 0.868 | 0.650 | 0.671 |
| U-Net_CZU_10 | 0.807 | 0.833 | 0.648 | 0.667 |
| Metric True Positives | Mean | Min | Max |
|---|---|---|---|
| Elevation (ft) | 369.80 | −10.00 | 821.00 |
| Slope (degrees) | 17.40 | 0.00 | 69.50 |
| Aspect (degrees from North) False Positives | 181.25 | 0.00 | 359.50 |
| Elevation (ft) | 365.10 | −6.00 | 918.00 |
| Slope (degrees) | 14.60 | 0.00 | 56.00 |
| Aspect (degrees from North) True Negatives | 168.90 | 0.00 | 359.30 |
| Elevation (ft) | 248.00 | −12.00 | 996.00 |
| Slope (degrees) | 11.80 | 0.00 | 69.50 |
| Aspect (degrees from North) False Negatives | 164.20 | 0.00 | 359.70 |
| Elevation (ft) | 382.00 | −12.00 | 821.00 |
| Slope (degrees) | 17.80 | 0.00 | 71.40 |
| Aspect (degrees from North) | 166.40 | 0.00 | 359.50 |
| Model | Accuracy | Precision | Recall | F1-Score |
|---|---|---|---|---|
| Zhang, Ban and Nascetti (2021) 1 | 0.862 | 0.947 | 0.448 | 0.604 |
| Belenguer-Plomer (2021) 2 | N/a | N/a | N/a | 0.460 |
| U-Net_CZU_3 | 0.813 | 0.868 | 0.650 | 0.671 |
| U-Net_CZU_10 | 0.807 | 0.833 | 0.648 | 0.667 |
| U-Net_Transfer | 0.810 | 0.460 | 0.730 | 0.410 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luft, H.; Schillaci, C.; Ceccherini, G.; Vieira, D.; Lipani, A. Deep Learning Based Burnt Area Mapping Using Sentinel 1 for the Santa Cruz Mountains Lightning Complex (CZU) and Creek Fires 2020. Fire 2022, 5, 163. https://doi.org/10.3390/fire5050163
Luft H, Schillaci C, Ceccherini G, Vieira D, Lipani A. Deep Learning Based Burnt Area Mapping Using Sentinel 1 for the Santa Cruz Mountains Lightning Complex (CZU) and Creek Fires 2020. Fire. 2022; 5(5):163. https://doi.org/10.3390/fire5050163
Chicago/Turabian StyleLuft, Harrison, Calogero Schillaci, Guido Ceccherini, Diana Vieira, and Aldo Lipani. 2022. "Deep Learning Based Burnt Area Mapping Using Sentinel 1 for the Santa Cruz Mountains Lightning Complex (CZU) and Creek Fires 2020" Fire 5, no. 5: 163. https://doi.org/10.3390/fire5050163