
2D Fluid-PIC Simulations of Hall Thrusters with Self-Consistent Resolution of the Space-Charge Regions
_Mikellides.jpg)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
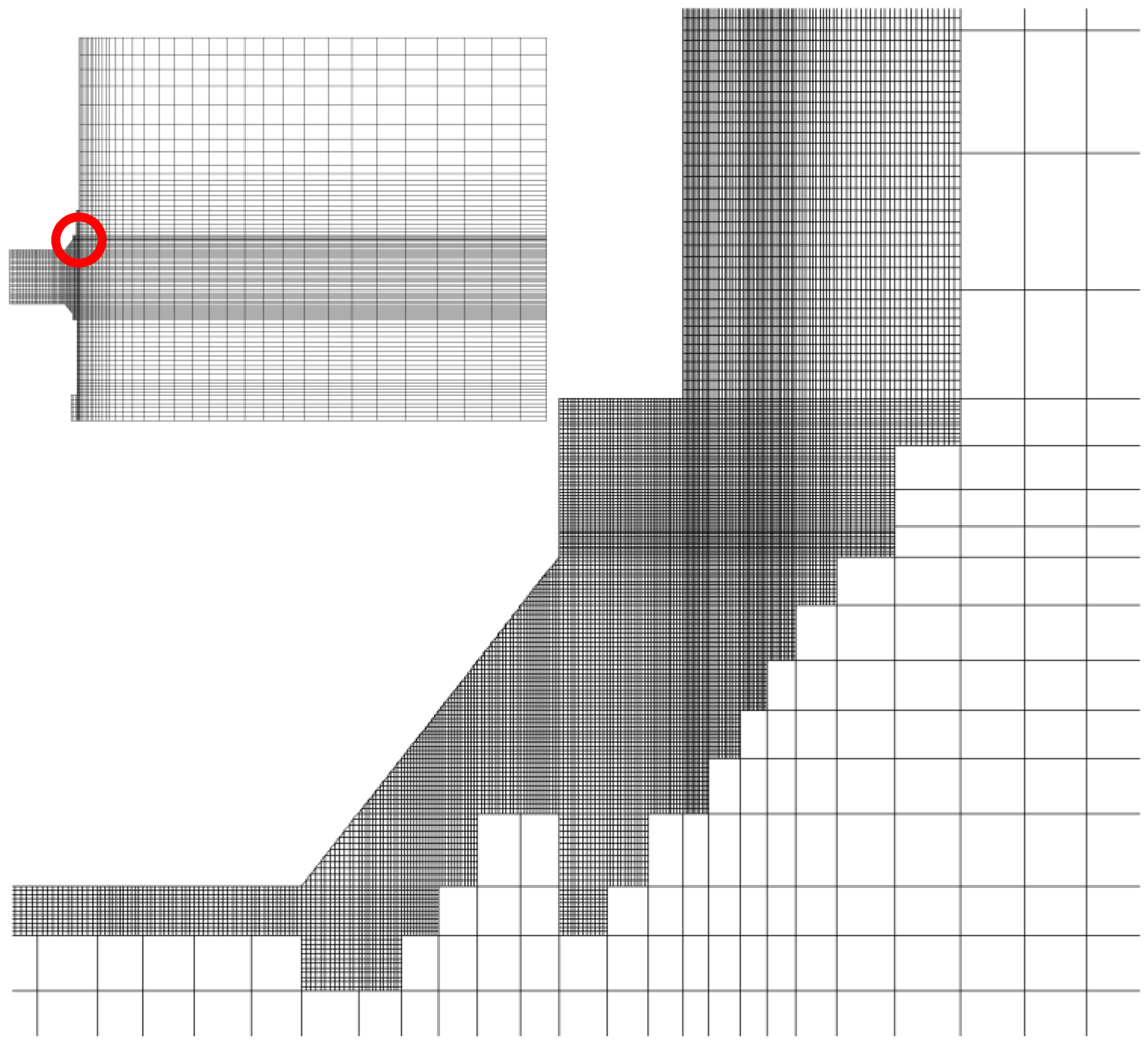
2. Grid Refinement for the Resolution of the Space-Charge Regions
3. Algorithm for the Solution of Poisson’s Equation
4. Ion Motion in the Presence of Thick Sheaths
5. Results
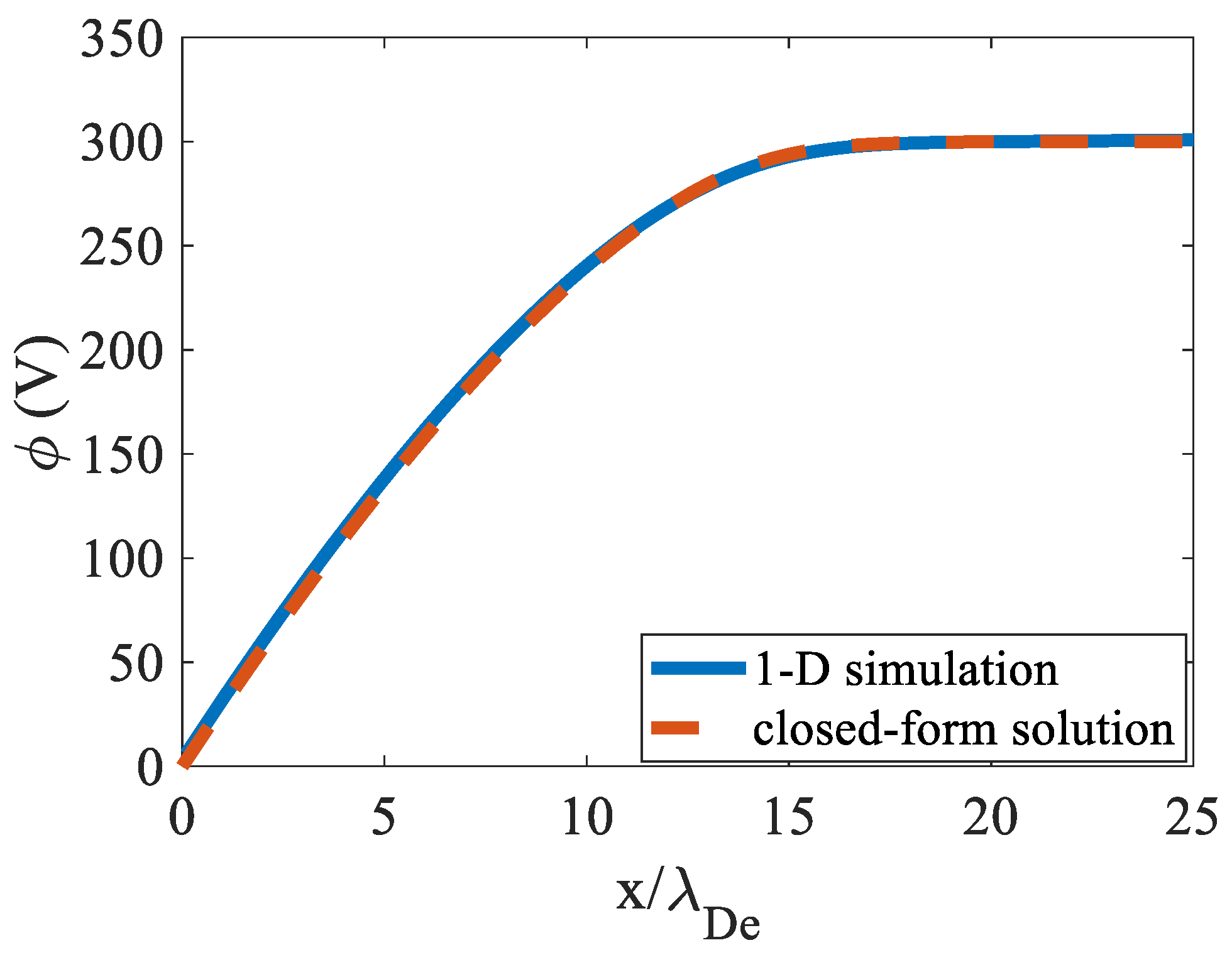
5.1. Verification in One Dimension (1-D)
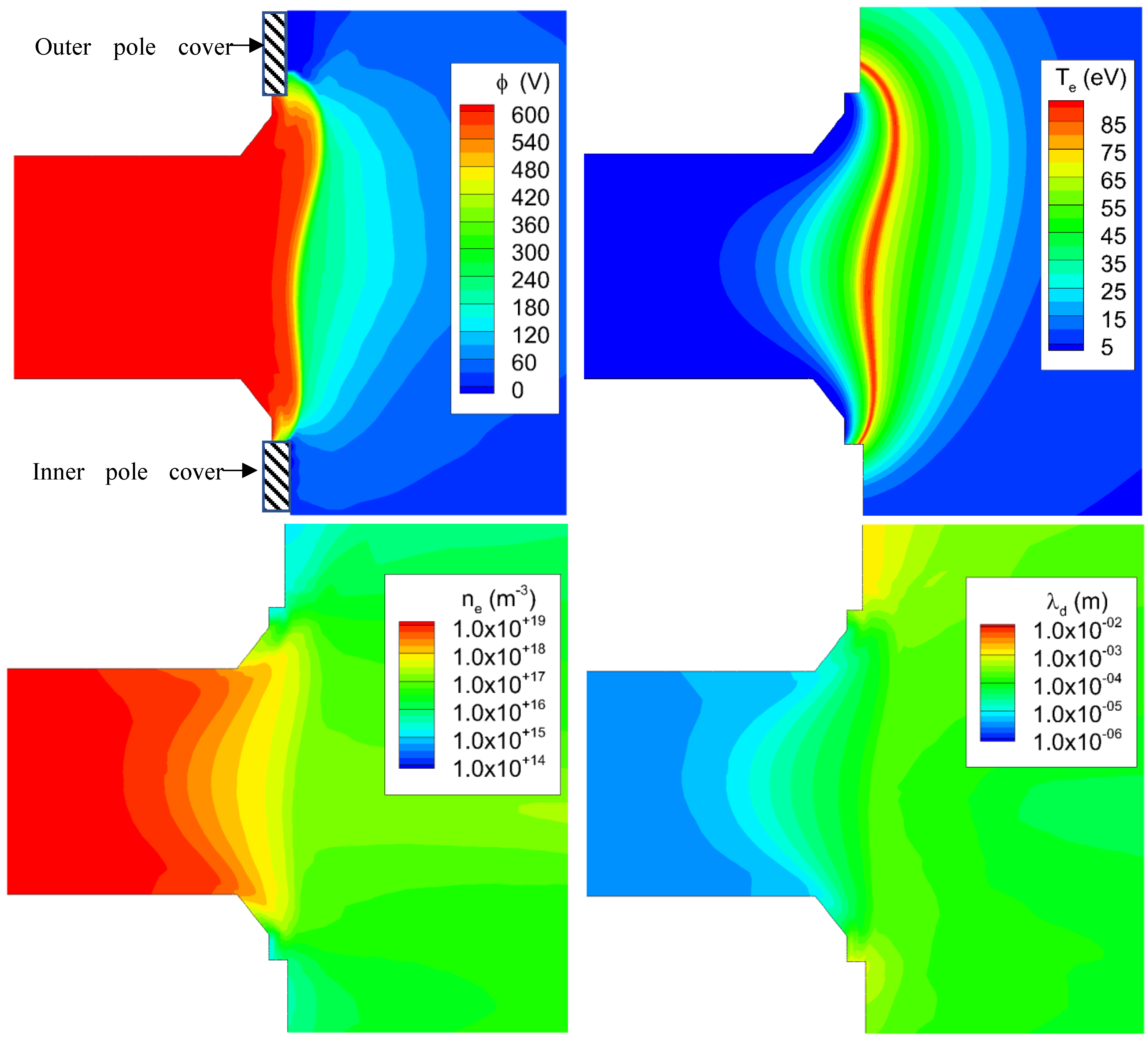
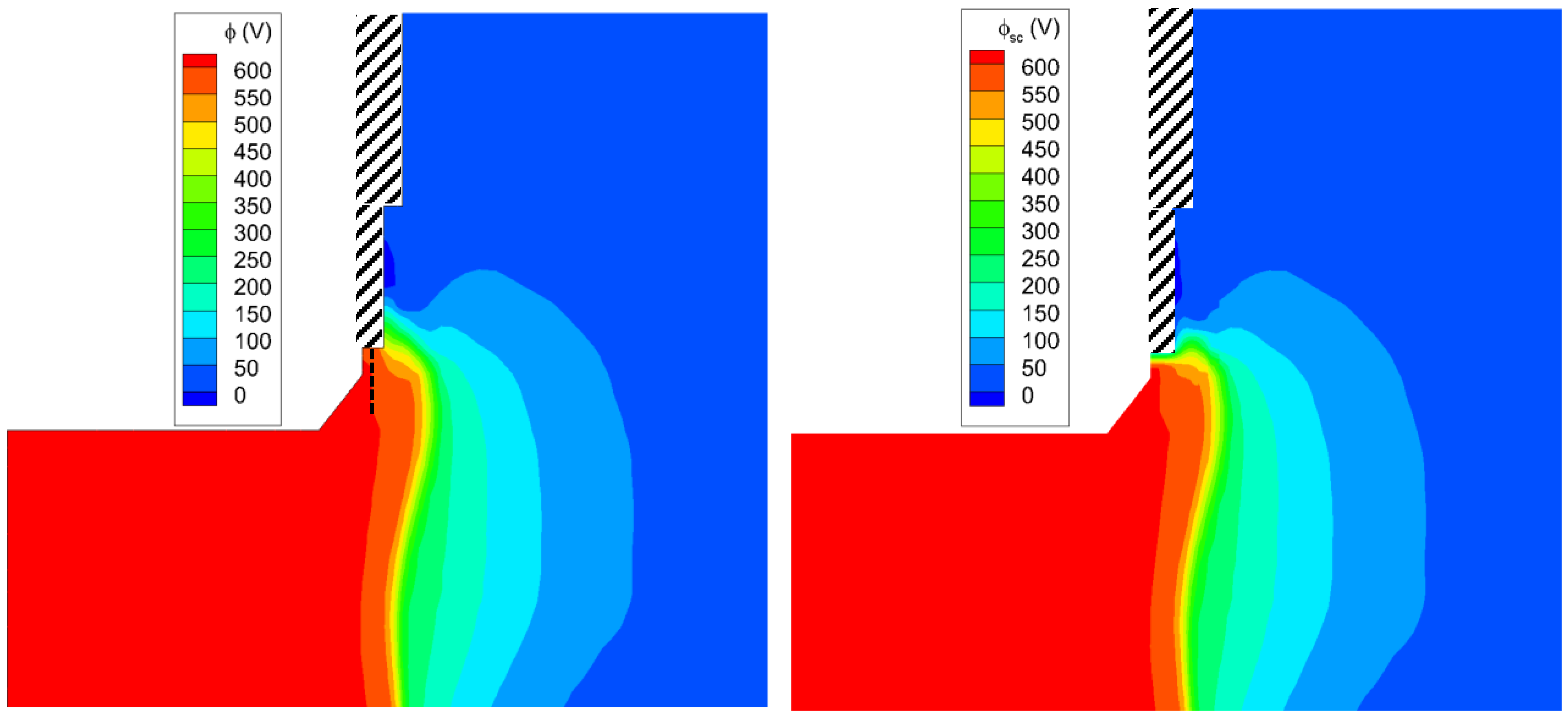
5.2. 2D Numerical Simulations with the Axial–Radial Code Hall2De
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mikellides, I.G.; Katz, I. Numerical Simulations of Hall-effect Plasma Accelerators on a Magnetic-Field-Aligned Mesh. Phys. Rev. E 2012, 86, 046703. [Google Scholar] [CrossRef]
- Fife, J.M. Hybrid-PIC Modeling and Electrostatic Probe Survey of Hall Thrusters. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1998. [Google Scholar]
- Parra, I.; Ahedo, E.; Fife, J.M.; Martinez-Sanchez, M. A Two-Dimensional Hybrid Model of the Hall Thruster Discharge. J. Appl. Phys. 2006, 100, 023304. [Google Scholar] [CrossRef]
- Pereles-Diaz, J.; Dominguez-Vazquez, A.; Fajardo, P.; Ahedo, E.; Faraji, F.; Reza, M.; Andreussi, T. Hybrid plasma simulations of a magnetically shielded Hall thruster. J. Appl. Phys. 2022, 131, 103302. [Google Scholar] [CrossRef]
- Scharfe, M.K.; Gascon, N.; Cappelli, M.A.; Fernandez, E. Comparison of Hybrid Hall Thruster Model to Experimental Measurements. Phys. Plasmas 2006, 13, 083505. [Google Scholar] [CrossRef]
- Sommier, E.; Scharfe, M.K.; Gascon, N.; Cappelli, M.A.; Fernandez, E. Simulating Plasma-Induced Hall Thruster Wall Erosion with a Two-Dimensional Hybrid Model. IEEE Trans. Plasma Sci. 2007, 35, 1379–1387. [Google Scholar] [CrossRef]
- Hagelaar, G.J.M.; Bareilles, J.; Garrigues, L.; Boeuf, J.P. Two-Dimensional Model of a Stationary Plasma Thruster. J. Appl. Phys. 2002, 91, 5592–5598. [Google Scholar] [CrossRef]
- Garrigues, L.; Hagelaar, G.J.M.; Boniface, C.; Boeuf, J.P. Anomalous Conductivity and Secondary Electron Emission in Hall Effect Thrusters. J. Appl. Phys. 2006, 100, 123301. [Google Scholar] [CrossRef]
- Hagelaar, G.J.M. Modelling Electron Transport in Magnetized Low-Temperature Discharge Plasmas. Plasma Sources Sci. Technol. 2007, 16, S57–S66. [Google Scholar] [CrossRef]
- Hobbs, G.D.; Wesson, J.A. Heat Flow through a Langmuir sheath in the Presence of Electron Emission. Plasma Phys. 1967, 9, 85–87. [Google Scholar] [CrossRef]
- Riemann, K.U. The Bohm Criterion and Sheath Formation. J. Phys. D Appl. Phys. 1991, 24, 493–518. [Google Scholar] [CrossRef]
- Mikellides, I.G.; Katz, I.; Hofer, R.R.; Goebel, D.M. Magnetic Shielding of Walls from the Unmagnetized Ion Beam in a Hall Thruster. Appl. Phys. Lett. 2013, 102, 023509. [Google Scholar] [CrossRef]
- Mikellides, I.G.; Katz, I.; Hofer, R.R.; Goebel, D.M.; de Grys, K.; Mathers, A. Magnetic Shielding of the Channel Walls in a Hall Plasma Accelerator. Phys. Plasmas 2011, 18, 033501. [Google Scholar] [CrossRef]
- Sekerak, M.J.; Hofer, R.R.; Polk, J.E.; Jorns, B.A.; Mikellides, I.G. Wear Testing of a Magnetically Shielded Hall Thruster at 2000-s Specific Impulse. In Proceedings of the IEPC 2015-155, 34th International Electric Propulsion Conference, Kobe, Japan, 4–10 July 2015. [Google Scholar]
- Lopez Ortega, A.; Mikellides, I.G.; Sekerak, M.J.; Jorns, B.A. Plasma Simulations in 2-D (r-z) Geometry for the Assessment of Pole Erosion in a Magnetically Shielded Hall Thruster. J. Appl. Phys. 2019, 125, 033302. [Google Scholar] [CrossRef]
- Lopez Ortega, A.; Mikellides, I.G.; Chaplin, V.H.; Huang, W.; Frieman, J.D. Anomalous Ion Heating and Pole Erosion in the 12.5-kWHall Effect Rocket with Magnetic Shielding (HERMeS). In Proceedings of the AIAA 2020-3620, AIAA Propulsion and Energy, Virtual Conference, 24–26 August 2020. [Google Scholar]
- Lopez Ortega, A.; Mikellides, I.G. Validation of Hall2De Simulations with Anomalous Ion Heating in the Pole Region of a Magnetically Shielded Hall Thruster. In Proceedings of the IEPC 2022-299, 37th International Electric Propulsion Conference, Boston, MA, USA, 19–23 June 2022. [Google Scholar]
- Adam, J.C.; Heron, A.; Laval, G. Study of Stationary Plasma Thrusters Using Two-Dimensional Fully Kinetic Simulations. Phys. Plasmas 2004, 11, 295–305. [Google Scholar] [CrossRef]
- Szabo, J.J. Fully Kinetic Numerical Modeling of a Plasma Thruster. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2001. [Google Scholar]
- Cho, S.; Komurasaki, K.; Arakawa, Y. Kinetic Particle Simulation of Discharge and Wall Erosion of a Hall Thruster. Phys. Plasmas 2013, 20, 063501. [Google Scholar] [CrossRef]
- Sahu, R.; Mansour, A.R.; Hara, K. Full Fluid Moment Model for Low Temperature Magnetized Plasmas. Phys. Plasmas 2020, 27, 113505. [Google Scholar] [CrossRef]
- Boccelli, S.; McDonald, J.G.; Magin, T.E. 14-Moment Maximum-Entropy Modeling of Collisionless Ions for Hall Thruster Discharges. Phys. Plasmas 2022, 29, 083903. [Google Scholar] [CrossRef]
- Lopez Ortega, A.; Mikellides, I.G.; Katz, I. Hall2De Numerical Simulations for the Assessment of Pole Erosion in a Magnetically Shielded Hall Thruster. In Proceedings of the IEPC 2015-249, 34th International Electric Propulsion Conference, Kobe, Japan, 4–10 July 2015. [Google Scholar]
- Ordonez, C.A. Fully Kinetic Plasma-Sheath Theory for a Cold-Electron Emitting Surface. Phys. Fluids B Plasma Phys. 1992, 4, 778–783. [Google Scholar] [CrossRef]
- Sheehan, J.P.; Hershkowitz; Kaganovich, I.D.; Wang, H.; Raitses, Y.; Sydorenko, D. Kinetic Theory of Plasma Sheaths Surrounding Electron-Emitting Surfaces. Phys. Rev. Lett. 2013, 111, 075002. [Google Scholar] [CrossRef]
- Reid, B.; Gallimore, A. Langmuir Probe Measurements in the Discharge Channel of a 6-kW Hall Thruster. In Proceedings of the AIAA 2008-4920, 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Hartford, CT, USA, 21–23 July 2008. [Google Scholar]
- Mikellides, I.G.; Katz, I.; Hofer, R.R.; Goebel, D.M. Magnetic Shielding of a Laboratory Hall Thruster. I. Theory and Validation. J. Appl. Phys. 2014, 115, 043303. [Google Scholar] [CrossRef]
- Hara, K.; Hanquist, K. Test Cases for Grid-Based Direct Kinetic Modeling of Plasma Flows. Plasma Sources Sci. Technol. 2018, 27, 065004. [Google Scholar] [CrossRef]
- Yim, J.T. A Survey of Xenon Ion Sputter Yield Data and Fits Relevant to Electric Propulsion Spacecraft Integration. In Proceedings of the IEPC 2017-060, 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 September 2017. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lopez Ortega, A.; Mikellides, I.G. 2D Fluid-PIC Simulations of Hall Thrusters with Self-Consistent Resolution of the Space-Charge Regions. Plasma 2023, 6, 550-562. https://doi.org/10.3390/plasma6030038
Lopez Ortega A, Mikellides IG. 2D Fluid-PIC Simulations of Hall Thrusters with Self-Consistent Resolution of the Space-Charge Regions. Plasma. 2023; 6(3):550-562. https://doi.org/10.3390/plasma6030038
Chicago/Turabian StyleLopez Ortega, Alejandro, and Ioannis G. Mikellides. 2023. "2D Fluid-PIC Simulations of Hall Thrusters with Self-Consistent Resolution of the Space-Charge Regions" Plasma 6, no. 3: 550-562. https://doi.org/10.3390/plasma6030038