
Case-Based Reasoning with an Artificial Neural Network for Decision Support in Situations at Complex Technological Objects of Urban Infrastructure


Abstract
:1. Introduction
1.1. The Relevance of Research
1.2. Problem Description and Proposed Method
- The need to create local similarity metrics and their aggregation into global metrics.
- The need for expert judgment when ranking the importance of attributes.
- The need to identify collisions, i.e., cases where the difference in situations in one attribute or local metrics can be compensated for by their similarity in other attributes.
2. Materials and Methods
2.1. Background and Related Work
2.2. Formation of a Training Dataset
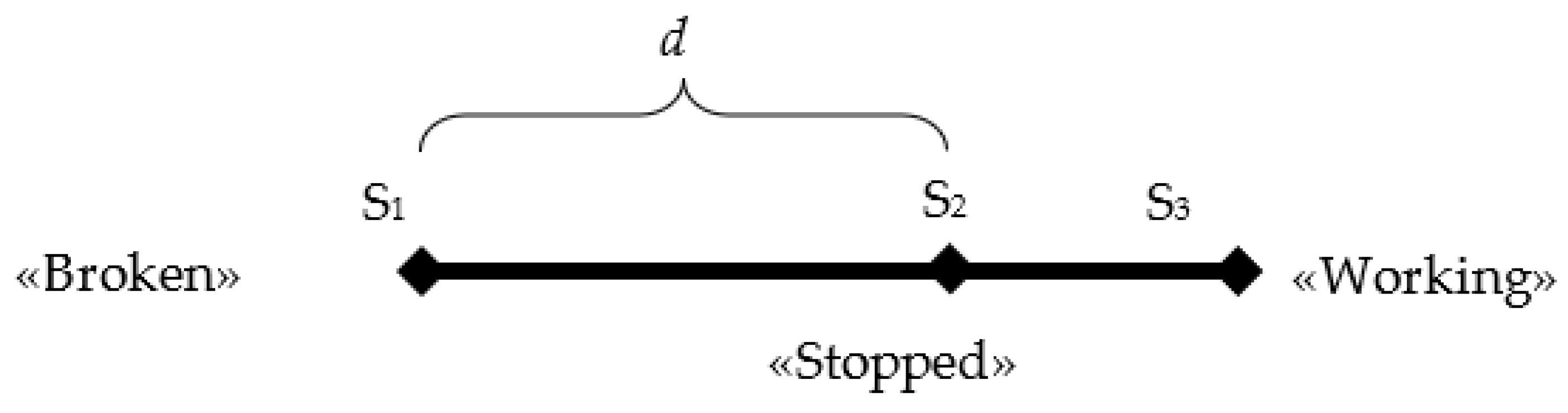
2.2.1. Representation of the Situation at the CTO
- technological (input pipe, pump, heat exchanger, interior pipe);
- providing (IT, electricity, other equipment);
- personnel (electrician, plumber, emergency service);
- environment (premises, neighbor house, nature event, nature object).
2.2.2. Forming a Dataset for Experiments
3. Results
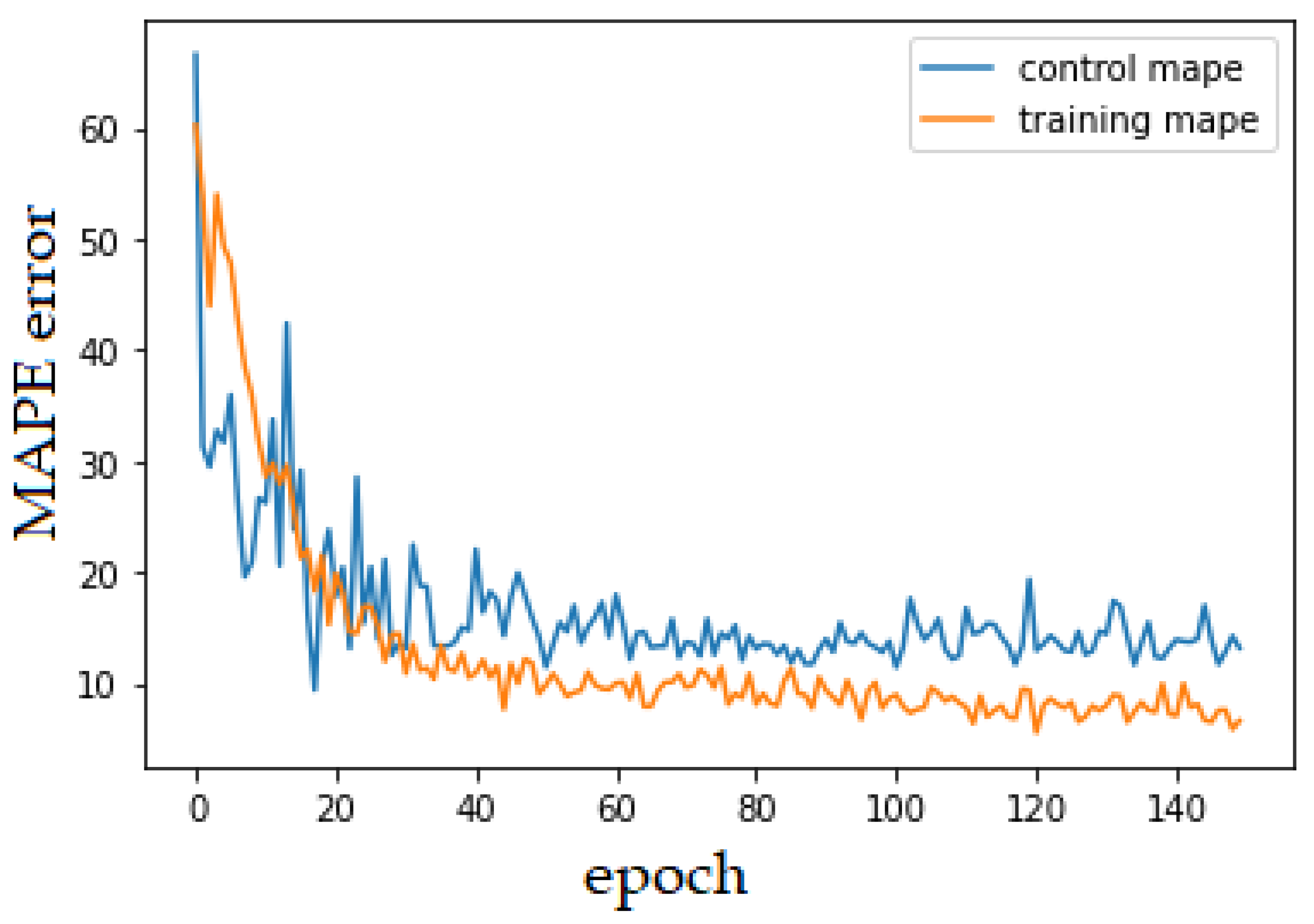
3.1. Multilayer Perceptron
- On TDS: Mape absolute error indicator 5.57% with the minimum value of the loss function 0.0032.
- On VDS: The absolute error of Mape 17.96% with the minimum value of the loss function 0.026.
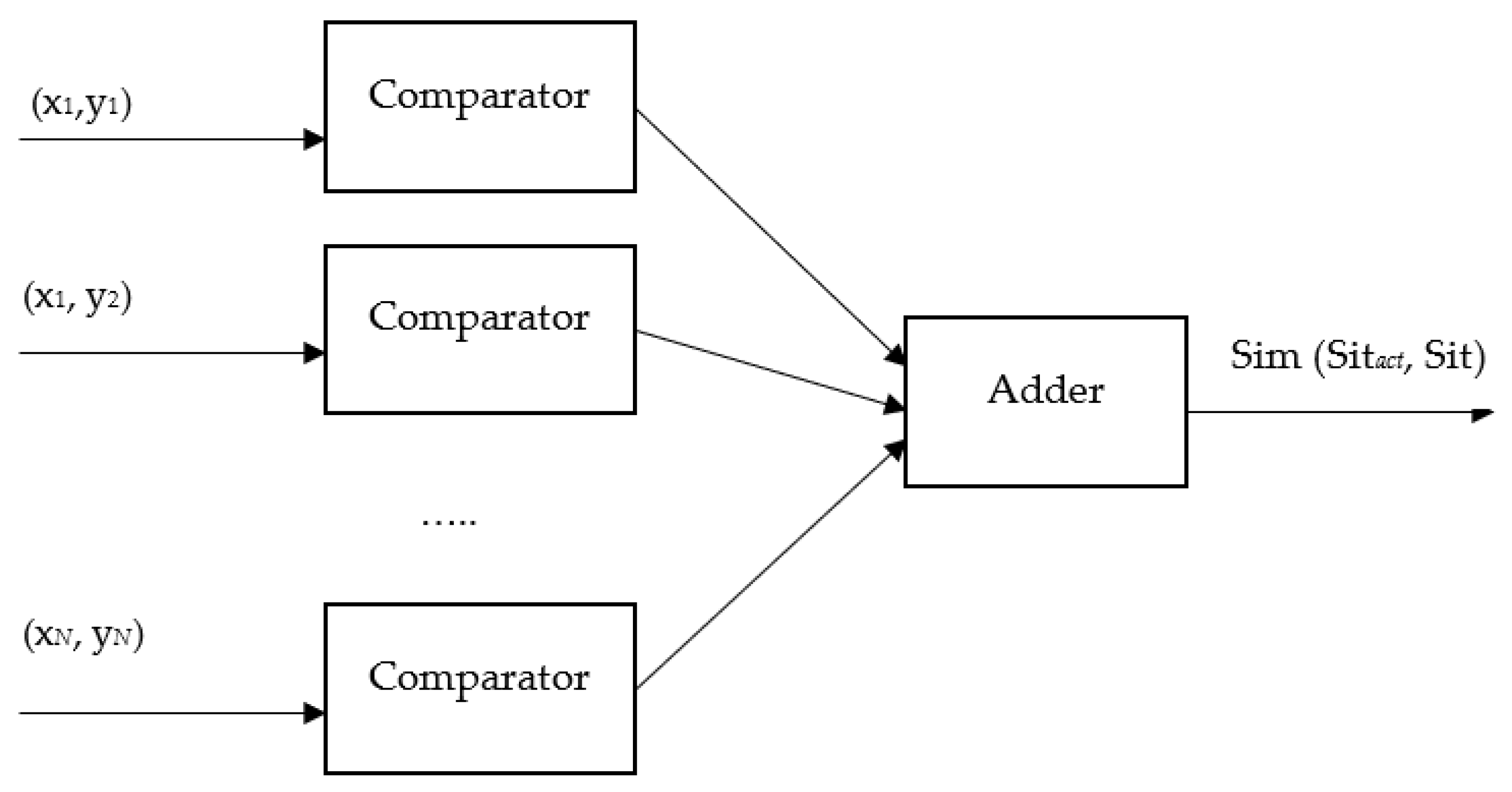
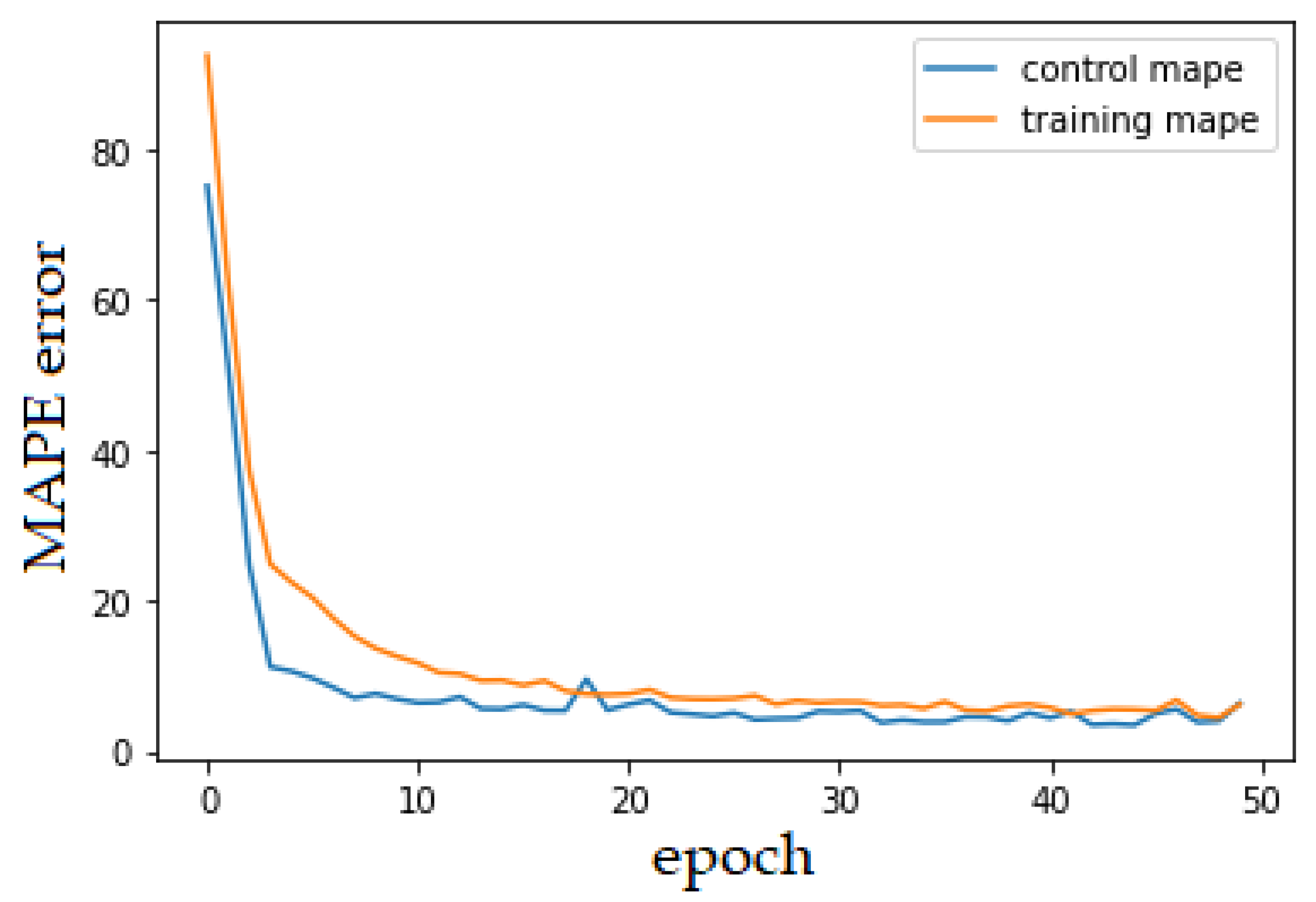
3.2. Comparator-Adder Architecture
- On TDS: Mape absolute error indicator—5.29% with the minimum value of the loss function 0.0022;
- On VDS: The absolute error of Mape is 9.55% with the minimum value of the loss function 0.0084.
- Sim (Sitk, Sitk) = 1
- Sim (Sitk, Sitz) = Sim (Sitz, Sitk),
- Sim (Sitk, Sitk) ≥ Sim (Sitk, Sitz),
4. Discussion
5. Conclusions and Further Work
- The formalization of the representation of the situation with the help of embeddings is proposed, which represent situations in the state space.
- A neural network architecture, Comparator-Adder, is developed to assess the similarity of situations.
- Using the example of the house heat point system, a training and validation dataset was prepared to test the efficiency of the proposed solutions.
- Experiments were carried out to assess the accuracy in predicting the similarity of situations using the proposed neural network architecture. Experiments have shown the applicability of this model for problems of comparison and selection of situations by means of their representation in the state space.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Glossary
| CTO | complex technological objects |
| IMDS | intelligence monitoring and decision-making systems |
| AP | action program |
| CBR | case-based reasoning |
| TDS | training data-set |
| VDS | validation data-set |
References
- Juraev, Z.S.; Muhamediyeva, D.T.; Sotvoldiev, D.M. Construction of hybrid intellectual monitoring and decision-making systems. J. Phys. Conf. Ser. 2020, 1546, 012083. [Google Scholar] [CrossRef]
- Aamodt, A.; Plaza, E. Case-based reasoning: Foundational issues, methodological variations, and system approaches. AI Commun. 1994, 7, 39–59. [Google Scholar] [CrossRef]
- Eremeev, A.; Varshavskiy, P.; Alekhin, R. Case-Based Reasoning Module for Intelligent Decision Support Systems. In Proceedings of the First International Scientific Conference “Intelligent Information Technologies for Industry” (IITI’16), Rostov-on-Don—Sochi, Russia, 16–21 May 2016; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2016; Volume 450, pp. 207–216. [Google Scholar]
- Huang, K.; Nie, W.; Luo, N. Scenario-based marine oil spill emergency response using hybrid deep reinforcement learning and case-based reasoning. Appl. Sci. 2020, 10, 5269. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, S.; Wang, J.; Lyu, S.; Skitmore, M. A decision method for construction safety risk management based on ontology and improved CBR: Example of a subway project. Int. J. Environ. Res. Public Health 2020, 17, 3928. [Google Scholar] [CrossRef] [PubMed]
- Perner, P. Case-Based Reasoning—Methods, Techniques, and Applications. In Transactions on Petri Nets and Other Models of Concurrency XV; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2019; pp. 16–30. [Google Scholar]
- Case-based reasoning research and development. In Proceedings of the Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 149–164.
- Mathisen, B.M.; Bach, K.; Aamodt, A. Using extended siamese networks to provide decision support in aquaculture operations. Appl. Intell. 2021, 1–12. [Google Scholar] [CrossRef]
- Nikpour, H.; Aamodt, A. Inference and reasoning in a Bayesian knowledge-intensive CBR system. Prog. Artif. Intell. 2021, 10, 49–63. [Google Scholar] [CrossRef]
- Mathisen, B.M.; Aamodt, A.; Bach, K.; Langseth, H. Learning similarity measures from data. Prog. Artif. Intell. 2020, 9, 129–143. [Google Scholar] [CrossRef] [Green Version]
- Glukhikh, I.; Glukhikh, D. Case based reasoning for managing urban infrastructure complex technological objects. In Proceedings of the CEUR Workshop 2021, Online. 28–29 May 2021; Volume 2843, p. 038. [Google Scholar]
- Glukhikh, I.; Glukhikh, D. Situations representation and retrieve in the case-based reasoning system for managing a complex technological object. In Proceedings of the CEUR Workshop 2021, Online. 28–29 May 2021; Volume 2922, p. 017. [Google Scholar]
- Aha, D.W. Case-based learning algorithms. In Proceedings of the 1991 DARPA Case-Based Reasoning Workshop, Washington, DC, USA, 31 May 1991; Volume 1, pp. 147–158. [Google Scholar]
- Chen, D.; Burrell, P. Case-based reasoning system networks: A review. Neural. Comput. Applic. 2001, 10, 264–276. [Google Scholar] [CrossRef] [Green Version]
- Kenny, E.M.; Keane, M.T. Twin-systems to explain artificial neural networks using case-based reasoning: Comparative tests of feature-weighting methods in ANN-CBR twins for XAI. In Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence; International Joint Conferences on Artificial Intelligence Organization, Macau, China, 10–16 August 2019; pp. 2708–2715. [Google Scholar]
- Hoffmann, M.; Bergmann, R. Informed machine learning for improved similarity assessment in process-oriented case-based reasoning. arXiv 2021, arXiv:2106.15931. [Google Scholar]
- Acconcjaioco, M.; Ntalampiras, S. One-shot learning for acoustic identification of bird species in non-stationary environments// Cornel University. arXiv 2021, arXiv:2105.00202. [Google Scholar]
- Deshpande, A.M.; Minai, A.A.; Kumar, M. One-shot recognition of manufacturing defects in steel surfaces. Procedia Manuf. 2020, 48, 1064–1071. [Google Scholar] [CrossRef]
- Hsiao, S.-C.; Kao, D.-Y.; Liu, Z.-Y.; Tso, R. Malware image classification using one-shot learning with siamese networks. Procedia Comput. Sci. 2019, 159, 1863–1871. [Google Scholar] [CrossRef]
- Abdelwahed, M.F.; Mohamed, A.E.; Saleh, M.A. Solving the motion planning problem using learning experience through case-based reasoning and machine learning algorithms. Ain Shams Eng. J. 2020, 11, 133–142. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, B.; Sun, Y.; Jiang, K.; Wu, K. Machine learning based feature selection and knowledge reasoning for CBR system under big data. Pattern Recognit. 2021, 112, 107805. [Google Scholar] [CrossRef]
- Zhai, Z.; Martínez, J.F.; Martínez, N.L.; Díaz, V.H. Applying case-based reasoning and a learning-based adaptation strategy to irrigation scheduling in grape farming. Comput. Electron. Agric. 2020, 178, 105741. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, W.; Zhu, Y.-X.; Guo, Y.-Q. Research on the integrated system of case-based reasoning and Bayesian network. ISA Trans. 2019, 90, 213–225. [Google Scholar] [CrossRef] [PubMed]
- Leake, D.; Ye, X.; Crandall, D. Supporting case-based reasoning with neural networks: An illustration for case adaptation. In Proceedings of the CEUR Workshop 2021, Online. 28–29 May 2021; Volume 2846, p. 1. [Google Scholar]
- Bhatia, A.; Pinto, A. Supporting automated construction of knowledge-bases for safety critical applications: Challenges and opportunities. In Proceedings of the CEUR Workshop 2021, Online. 28–29 May 2021; Volume 2846, p. 37. [Google Scholar]
- Saker, M.K.; Zhou, L.; Eberhart, A.; Hitzler, P. Neuro-symbolic artificial intelligence: Current trends. arXiv 2021, arXiv:2105.05330 [cs.AI]. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sitact | Workable | Broken | Working | Stopped | Not Available | Available | Influence | Not Influence |
|---|---|---|---|---|---|---|---|---|
| Input pipe | 1 | - | - | - | - | - | - | - |
| Interior pipe | 1 | - | - | - | - | - | - | - |
| Heat exchanger | 1 | - | - | - | - | - | - | - |
| Pump | - | - | 1 | - | - | - | - | - |
| Other equipment | - | - | 1 | - | - | - | - | - |
| IT | - | - | 1 | - | - | - | - | - |
| Electricity | - | - | - | - | - | 1 | - | - |
| Emergency service | - | - | - | - | - | 1 | - | - |
| Plumber | - | - | - | - | - | 1 | - | - |
| Electrician | - | - | - | - | - | 1 | - | - |
| Neighbor house | - | - | - | - | - | - | - | 1 |
| Nature object | - | - | - | - | - | - | - | 1 |
| Nature event | - | - | - | - | - | - | - | 1 |
| Premises | - | - | - | - | - | - | - | 1 |
| Sim(.) | Sit1 | Sit2 | Sit3 | Sit4 | Sit5 |
|---|---|---|---|---|---|
| Sit1 | 0.947 | 0.691 | 0.536 | 0.624 | 0.492 |
| Sit2 | 0.687 | 0.96 | 0.38 | 0.471 | 0.359 |
| Sit3 | 0.59 | 0.496 | 0.912 | 0.442 | 0.802 |
| Sit4 | 0.624 | 0.472 | 0.338 | 0.894 | 0.402 |
| Sit5 | 0.58 | 0.454 | 0.807 | 0.539 | 0.907 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glukhikh, I.; Glukhikh, D. Case-Based Reasoning with an Artificial Neural Network for Decision Support in Situations at Complex Technological Objects of Urban Infrastructure. Appl. Syst. Innov. 2021, 4, 73. https://doi.org/10.3390/asi4040073
Glukhikh I, Glukhikh D. Case-Based Reasoning with an Artificial Neural Network for Decision Support in Situations at Complex Technological Objects of Urban Infrastructure. Applied System Innovation. 2021; 4(4):73. https://doi.org/10.3390/asi4040073
Chicago/Turabian StyleGlukhikh, Igor, and Dmitry Glukhikh. 2021. "Case-Based Reasoning with an Artificial Neural Network for Decision Support in Situations at Complex Technological Objects of Urban Infrastructure" Applied System Innovation 4, no. 4: 73. https://doi.org/10.3390/asi4040073