1. Introduction
Today, the use of polymer materials in 3D printing technology (additive manufacturing) has significant potential for development. Three-dimensional (3D) printing is a process of creating three-dimensional objects by adding layers of material on top of each other and using composite materials leads to enhanced mechanical, thermal, or electrical properties [
1]. Additive manufacturing with composite materials offers several advantages over traditional single-material printing. Composite materials offer the ability to engineer specific material properties by selecting appropriate combinations of matrix materials and reinforcements [
2]. This allows for tailoring strength, stiffness, other mechanical properties, conductivity, electrical conductivity, chemical resistance, and more to meet the application requirements. In addition, 3D printing allows for the use of various types of matrix materials and reinforcements, such as thermoplastics, thermosets, carbon fibers, glass fibers, metal particles, and more. This allows for complex geometries and intricate designs, optimizing designs, and reducing weight while maintaining mechanical integrity. However, it is worth noting that the 3D printing of composite materials also poses some challenges [
3]. Some of them, for instance toolpath planning and optimization, material allocation and scheduling, optimizing printing parameters, can be solved using graph theory. Similar problems occur in the development of interconnection topology in 3D MID technology (Three-Dimensional Molded Interconnect Devices) of injection-molded thermoplastic circuit carriers with in-built conductive traces and pads which can be regarded as a kind of 3D PCB [
4].
Graph algorithms, such as shortest path algorithms, can be used to plan and optimize the toolpath for 3D printing [
5,
6]. The toolpath is the sequence of movements that the 3D printer’s nozzle or laser follows to create the object. By modeling the printing environment as a graph, with nodes representing printable locations and edges representing feasible movements, algorithms can find efficient toolpaths that minimize travel time, reduce the number of retractions or tool head movements, and optimize the overall printing process. Graph theory can assist in optimizing material allocation and scheduling in multi-material or multi-object printing scenarios [
7]. By representing the objects or materials as nodes and their dependencies or constraints as edges, graph algorithms can find optimal allocation strategies, minimize material changes or swaps, and schedule the printing process to minimize downtime and maximize efficiency.
These problems mostly refer to the category of NP problems, whose solution algorithms are mainly based on forms of variant search. Computer support of this process is implemented by specialized, expensive application software packages. The methodological basis for solving such problems is created by graph theory. Graph theory is a mathematical field that deals with the study of graphs, which are mathematical structures used to model relationships between objects. Graph theory has applications in many different fields, including computer science, research of operations in complex systems, physics, biology, social sciences, and many others.
Computer graph algorithms are used in many applications such as routing and scheduling problems, recommendation systems, social networks, and data mining [
8]. In physics, graphs are used to model the behavior of physical systems such as molecules, crystals, and networks [
9,
10]. Graph theory is used in biology to model and analyze biological networks such as gene regulatory networks, protein interaction networks, food webs, in the study of epidemiology, and the spread of infectious diseases [
11]. In social sciences, graphs are used to study social networks and social structures and determine the level of influence of subjects in these networks [
12]. Graph theory is also actively used in operations research of complex systems to model and solve problems such as network optimization, transportation planning, and facility location [
13,
14,
15]. Graph algorithms can then be used to find the optimal allocation of resources that maximize effectiveness of the system. It is necessary, though, to separate the optimization problems [
16,
17]. Graph theory is used to model such networks and to find optimal paths or routes that minimize cost, time, or other factors. By using graph theory algorithms and techniques, it is possible to find optimal solutions to a wide range of telecommunication or computer network design and optimization problems [
18,
19,
20].
The most common extremal problems on graphs of wide practical application are the problems of finding minimum vertex and edge covers, minimum dominant and maximum independent sets of vertices and edges, maximum clique, critical path, minimal spanning tree, and minimum Hamiltonian cycle of a graph. Such problems belong to the category of graph extremal problems. Some of these problems can be represented as integer linear programming problems, the solving of which can be achieved with modifications of the simplex method.
The simplex method is a widely used algorithm for solving linear programming problems that is used to find the optimality solution to a system of linear equations, subject to constraints in the form of linear inequalities [
21]. The simplex method works by starting at a feasible solution and iteratively improving the solution until the optimal one is reached. This method is used in a wide range of applications, including production planning, resource allocation, financial modeling, and transportation planning. The algorithm has been extended and modified over time to handle more complex problems, such as mixed-integer programming and nonlinear programming [
22].
Variants of modeling and solving some of these problems by MS Excel Solver are proposed in [
23,
24]. The mathematical formulation of extremal problems as Boolean linear programming problems in [
23,
25,
26] are given individually for every graph configuration, which does not allow unifying the procedures of creating and solving a spreadsheet model. Moreover, some models include redundant constraints, e.g., a constraint on the number of edges/vertices in minimal edge/vertex covers, which makes sense if the edge cover is supposed to be the graph spanning tree. The authors of [
23,
27] propose modeling the problems on finding the smallest set covering and packing, the smallest dominant set of vertices, the shortest path on a graph, and the minimum Hamiltonian cycle as integer linear programming problems when using analytical representation of a graph by its adjacency matrix. Thus, a matrix of unknowns with the dimension of the graph adjacency matrix is used to find the required subset of vertices, thereby limiting the use of the method to graphs with the number of vertices N ≤ (N
0)
1/2, where N
0 is the Solver limit for the number of integer variables, which in non-professional versions does not exceed 100, so the vertex set power for the studied graph is limited to 10. In [
28], the graph is represented by reduced adjacency matrix with dimension (N−1), which makes it possible to slightly extend the modeled graph range and to propose modeling and solution of minimal path and minimal spanning tree problems. In [
24], a Solver-oriented spreadsheet model of the graph, the critical path problem is based on specifying the graph structure by an extended incidence matrix (i.e., matrix containing also a basic node) with using the matrix of unknowns of the same dimension as the extended incidence matrix, thus limiting the method application to graphs with N × M ≤ N
0, where N and M are the powers of the graph vertex and edge sets, respectively. N
0 is the Solver limit for integer variables.
Thus, the task of implementing procedures for solving such problems by means of standard engineering software seems to be actual. This paper aims to develop efficient spreadsheet models of some extremal problems for graphs of higher strength in order to prove the feasibility and unify the procedures of solving such problems via the MS Excel Solver add-in.
The basic novelty of the work consists in finding the way to represent a number of combinatorial problems on graphs as binary linear programming problems in Microsoft Excel. The very idea of solving some of the considered problems on graphs not by using algorithms common for each type of problem but as binary linear programming problems belongs to S. P. Ighlin [
19]. However, the presenting the proposed BLP models as spreadsheet models appears to be too cumbersome, which makes it difficult to use the Microsoft Excel Solver add-in for solving these problems. At the same time, the version of spreadsheet models developed by the authors is the most compact one and does not require additional built-in functions for matrix transformation, thus making it affordable for common users. An additional result of this research is also the extension of the types of problems that can be solved directly by MS Excel Solver by the simplex method, including extreme graph problems, previously considered beyond the scope of MS Excel (please see the
Supplementary Materials).
The area of application of the proposed models extends far beyond 3D printing. The urgency of such solutions became even more acute in Ukraine during the armed hostilities, when many small- and medium-sized enterprises were forced to relocate their business. The usual logistics chains were destroyed, and the identification and optimization of new ones had to be carried out as quickly as possible without the involvement of additional funds or personnel, using the most common software, primarily the Microsoft Office package. The developed problem models allow these tasks to be solved with very few staff skills. It should also be noted that many of the optimal target hitting problems also come down to the tasks discussed above. These problems are to be solved in combat situations by mid-level military personnel using, among others, smartphones, which precludes the use of special software.
3. Results
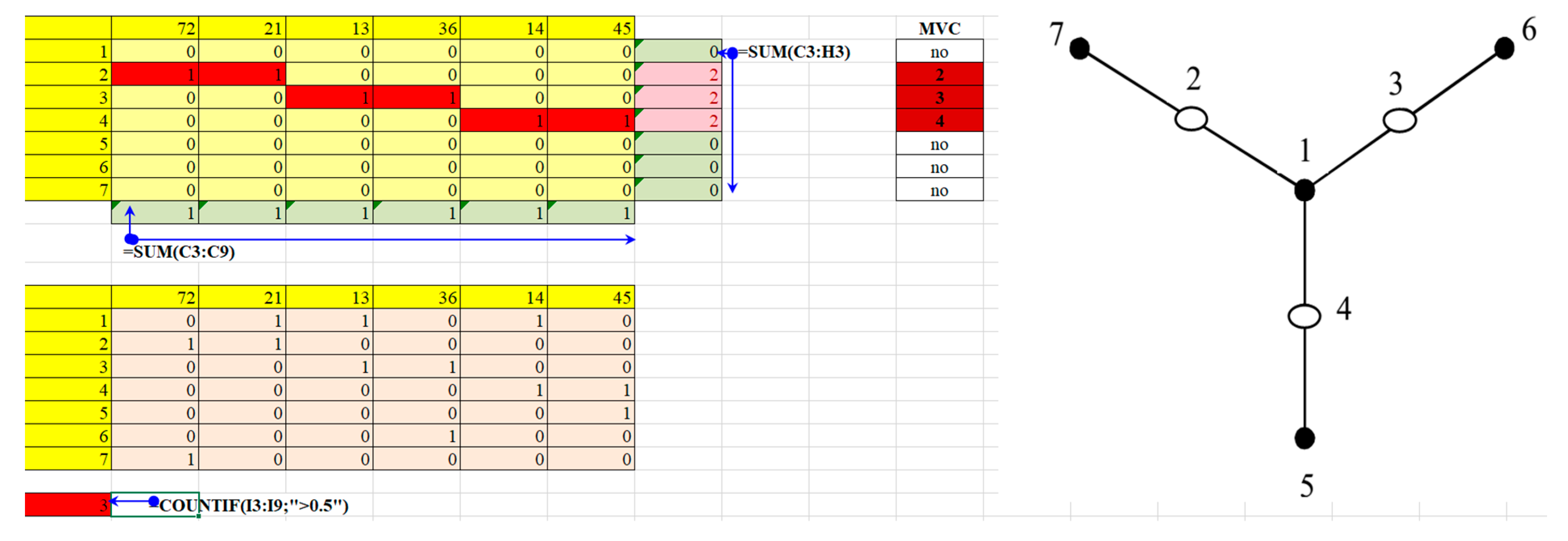
3.1. Minimum Vertex Cover Problem
For the initial testing of the proposed method, graph G presented in [
32,
40,
41] was chosen. Graph G and its spreadsheet model based on its extended incidence matrix are shown in
Figure 1 and
Table 1 and
Table 2.
After transferring the problem model to the Solver dialog box and setting the convergence parameter to 0.00001, we run the solution search procedure for minimizing the objective function by evolutionary method for 10 times. For nine runs, we obtained values of the objective function of 3, with MVC = {2, 3, 4}, which corresponds to the result obtained in [
40,
41]. Once the search procedure returned a target cell value of 4 with MVC = {1, 2, 3, 4}. After reducing the convergence to 0.0000001, the value of the objective function of 3 and MVC = {2, 3, 4} was obtained. A similar result was obtained after changing the initial search values. In all cases, a search time limit of 30 s was set, with actual search times ranging from 4 to 15 s.
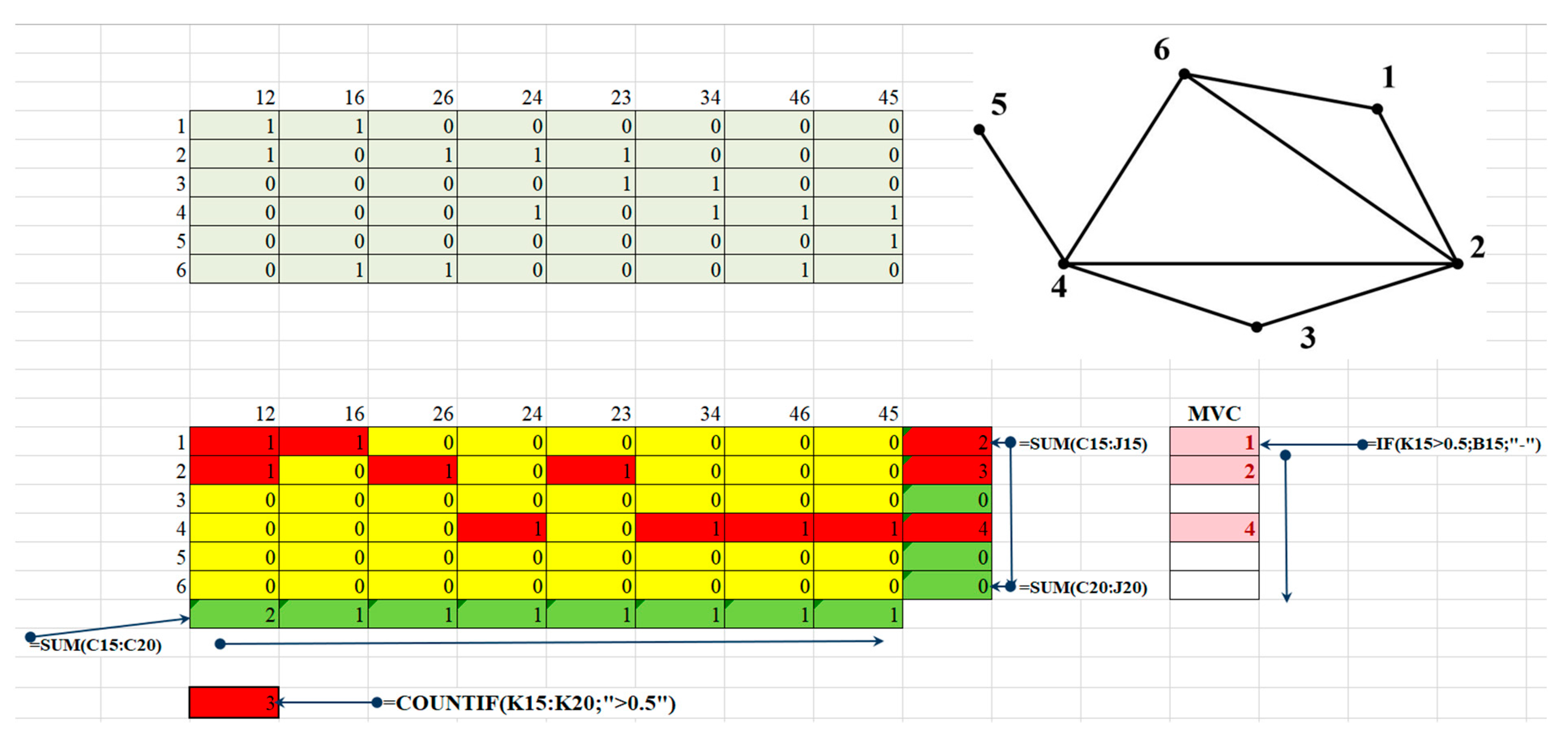
For smaller graphs [
42,
43], as one would expect, the search took less time. For the graph in
Figure 2, a similar problem model was built and similar constraints were set. The result of solving the problem (
Figure 2) was obtained 10 consecutive times with the search time never exceeding 5 s.
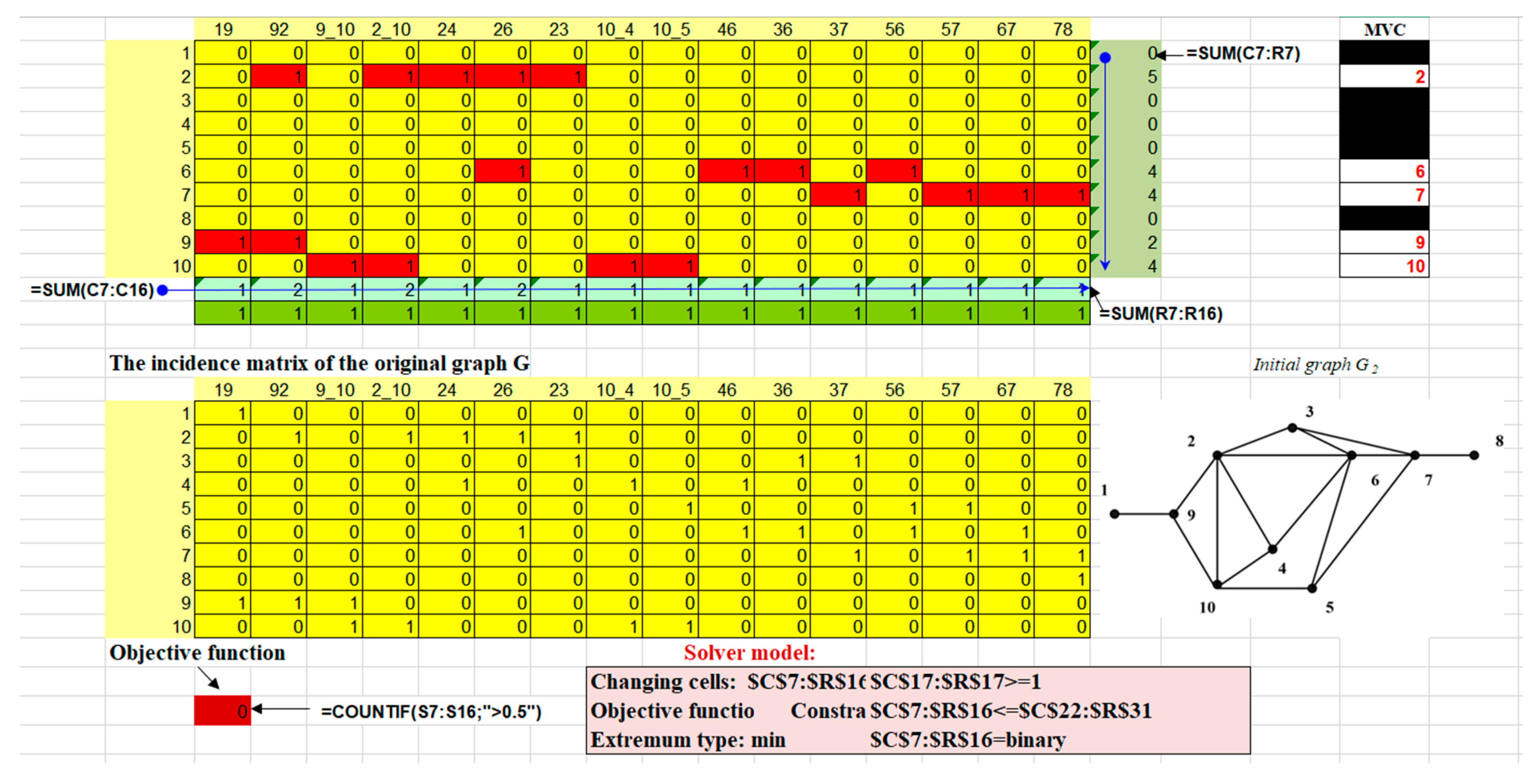
To test the suitability of the method for graphs of higher strength, the method was tested on several graphs, one of which is shown in the figure below (
Figure 3) together with a spreadsheet model of the MVC problem for this graph G
2 on an Excel sheet and Solver model parameters.
Having set the convergence parameter to 0.00001, we implemented the procedure for minimizing the target function by evolutionary search 8 times, gradually increasing the convergence to 0.0000000001, with a change of the starting point in some cases (tests 2, 7, and 8). A search time limit of 30 s was set. The search did not last more than 25 s. The results of the computational experiment are given in
Table 3.
As
Table 3 shows, for all cases the graph MVC consisting of vertices {2, 6, 7, 9, 10} was obtained over several search procedures. It corresponds to the maximum inner independent vertex set {1, 3, 4, 5, 8}, being the difference of the set of graph vertices V and the MVC V*.
As computational experiments show, while the number of vertices and edges of a graph increases, it becomes more and more difficult to obtain a globally optimal solution to the MVC problem and the associated problem of determining the maximum independent set by the evolutionary search. The evolutionary search method was applied because of the discontinuous nature of the target function COUNTIF. In order to change the search method, an attempt was made to change the model of the problem, so that the COUNTIF function could be replaced by the SUM function. To do this, the items of the target function are to take only one of two values 0∨1, where 1 corresponds to the vertex included in MVC (i.e., there are values other than 0 in the row corresponding to the vertex) and 0 otherwise. This can be achieved by introducing into the problem model a vector of unknowns
, whose N components will be associated with the vertices of the graph, and take value 1 if the vertex is included in the MVC, and 0 in the opposite case [
30].
Then, using, as before, the extended incidence matrix A = {a
ik} to define the structure of the initial graph, the constraint for covering all edges of the graph by the required set of vertices forming MVC can be represented as:
for each edge, i.e., for each matrix A column, and the model of the problem under consideration assumes the following form:
This is a model of a Boolean linear programming (BLP) problem [
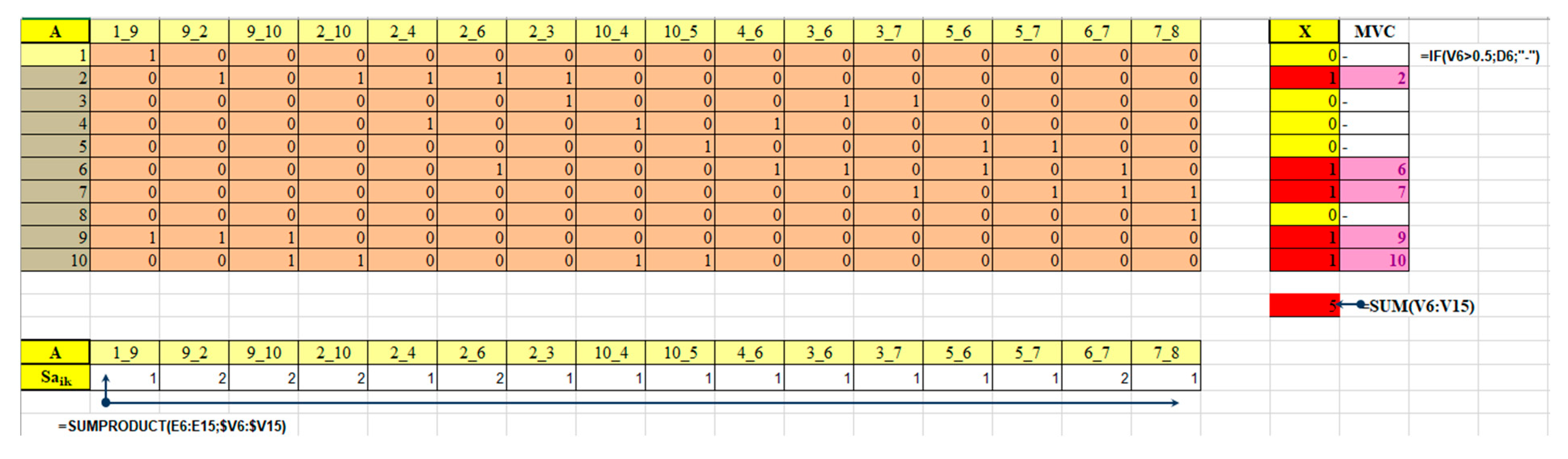
19]. The simplest way to implement the constraint (5) is to use the built-in Excel function SUMPRODUCT (array1, array2, … [array
n]), which returns the sum of element-by-element products of arrays of the same size. In this case, the spreadsheet model for finding the minimum vertex cover of the graph G
2 (
Figure 3) will look as presented in
Figure 4 and
Table 4 and
Table 5.
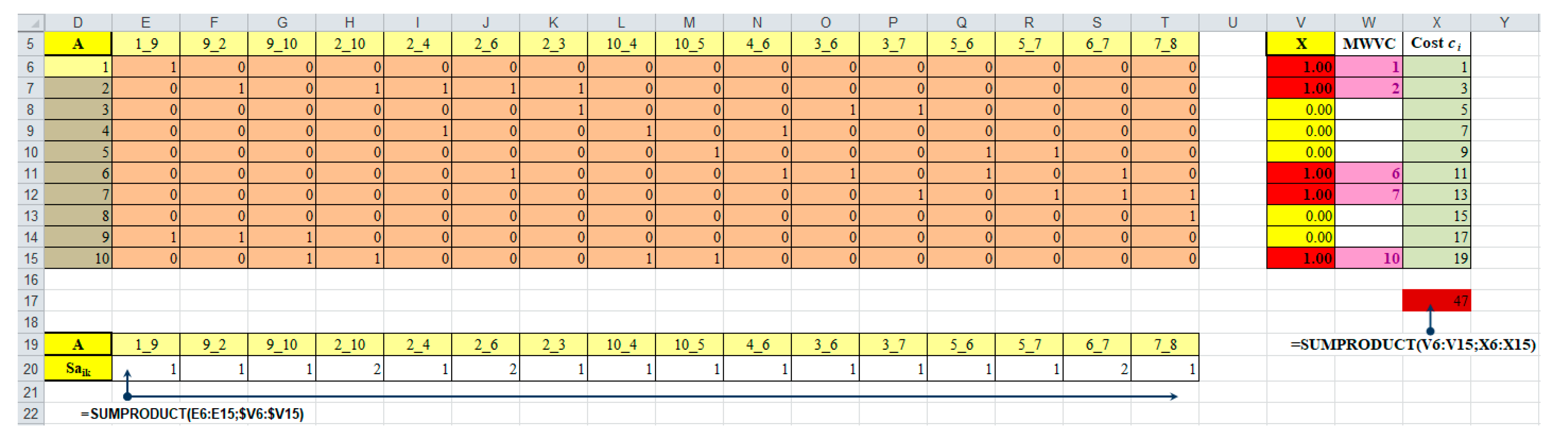
As can be seen from
Table 4, all model functions are linear. Transferring the model to the Solver dialog box and setting the optimization criterion to minimization, we chose the simplex search method, taking into account linearity of the model. The solution {2, 6, 7, 9, 10} is obtained almost instantly (
Figure 4). This is one of the minimum vertex covers. Using additional constraints on the inclusion of a certain vertex in a cover, we obtain all variants of MVCs. In particular, if the vertex 9 (P27 = 1) is mandatory to be included in the cover, we obtain the solution {2, 6, 7, 9, 10}, i.e., the graph has 2 minimum vertex covers with number of cover of 5.
As seen from the comparison of
Table 2,
Table 3,
Table 4 and
Table 5, this variant of problem representation provides a significantly more efficient spreadsheet model suitable for solving by the simplex method which guarantees obtaining globally optimal (minimum) value of coverage number in any case, i.e., the minimum vertex cover. The number of variables in comparison to the previous variant decreases by a factor T, which makes it possible to apply the method for graphs of bigger strength up to 200, since for linear programming problems, the number of Boolean variables in standard versions of Excel Solver cannot exceed 200. A gain in model efficiency compared to [
24,
30] is achieved by eliminating the formation of the transposed incidence matrix and matrix multiplication operation by taking advantage of the SUMPRODUCT function.
3.2. Minimum Weighted Vertex Cover Problem
The problem differs from the previous one by proposing to minimize not the number of covers, but its value under the assumption that each i-th vertex has a certain cost (weight) c
i. The model of this problem will differ from the previous one only in the objective function
, which necessitates the introducing into the spreadsheet model a one-dimensional array containing the costs (weights) of the vertices c
i,
. After placing this array in cells X6:X15, the objective function formula in cell X17 changes to SUMPRODUCT(V6:V15; X6:X15). Other elements of the problem model remain corresponding
Table 4 and
Table 5. By transferring the problem model to the Solver parameter window, we obtain the solution shown in
Figure 5.
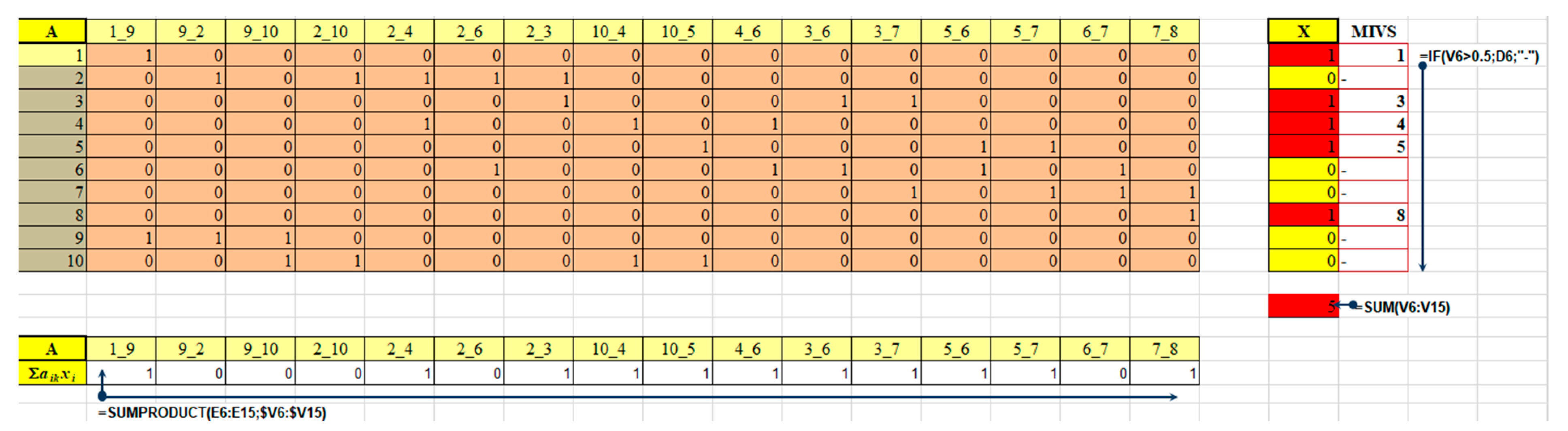
3.3. Maximum Inner Independent Vertex Set (MIVS) Problem
As mentioned before, due to the interrelation between the MIVS and MVC the solution of the MIVC problem can be obtained from the solution of that for MVC as MIVS = G\MVC. However, if the application problem assumes finding exactly the MIVS, a spreadsheet model of the problem can be easily obtained in the same way as the model of the MVC problem. Applying the same notations as in the previous case, and using, as before, the extended graph incidence matrix A = {a
ik} to specify the structure of the original graph, a mathematical model of the MIVS problem can be obtained as (7):
It is evident that the spreadsheet model of the problem (7) differs from that presented in
Table 4 only in the meaning of the unknowns {x
i}, which are associated with MIVS vertices instead of those included in MVC, and in the meaning and type of the objective function extremum, which will specify the independence number α(G) and will aim at a maximum
(). The spreadsheet model of the constraints takes the form shown in
Table 6.
All the model functions are linear (
Table 4 and
Table 6). After transferring the model to the Solver dialog box and setting the optimization criterion to maximum, the simplex search method is run (
Figure 6).
The solution {1, 3, 4, 5, 8} is obtained almost immediately. This is one of the maximum independent sets of vertices. By applying additional constraints on the inclusion of certain vertices in an independent set, other variants of the MIVS can be obtained, in particular {3, 4, 5, 8, 9}.
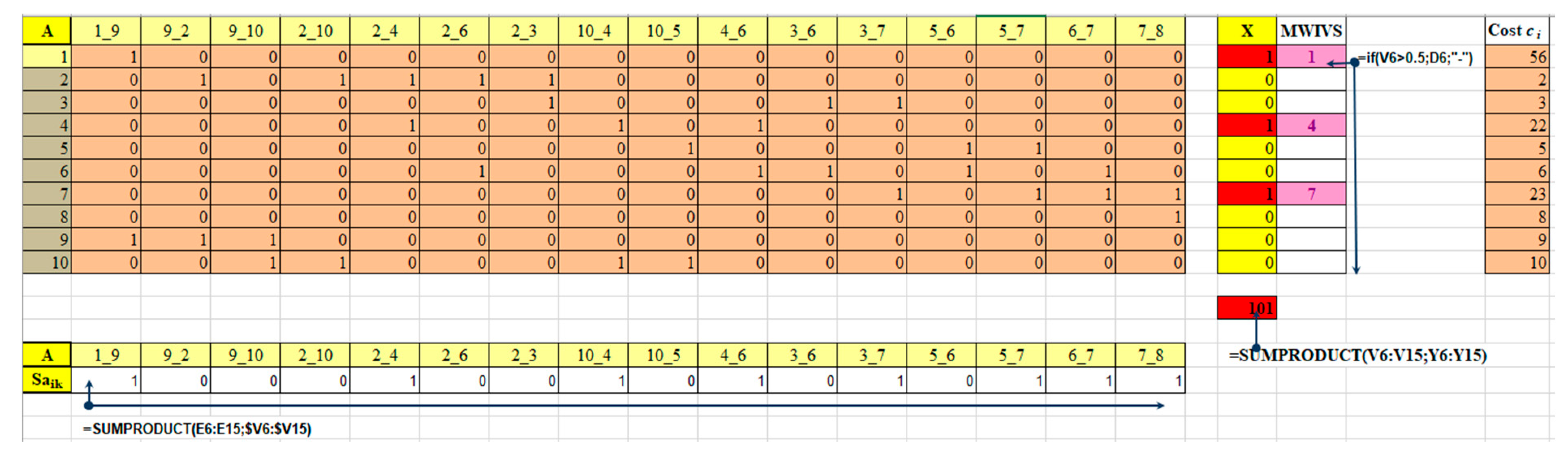
3.4. Minimum Weighted Inner Independent Vertex Set
The problem aims to minimize not the independence number α(G), but its value C under the assumption that each i-th vertex has a certain cost (weight) c
i. The model of this problem differs from the MIVS problem only in the objective function
, which results in introducing into the spreadsheet model a one-dimensional array containing the costs (weights) of the vertices c
i,
. After placing this array in cells Y6:Y15, the objective function formula in cell X17 changes to SUMPRODUCT(V6:V15;Y6:Y15). Other model elements remain corresponding to
Table 4 and
Table 6. By transferring the problem model to the Solver parameter window and running the simplex method, we obtain the solution in
Figure 7.
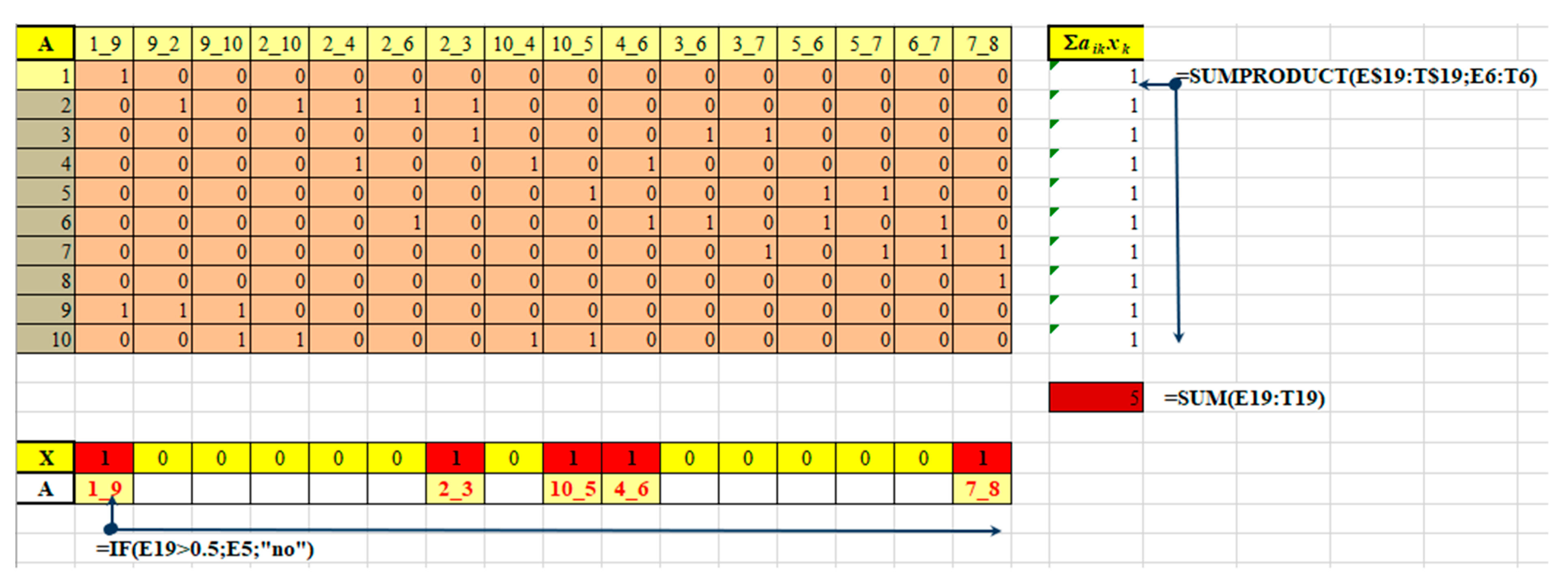
3.5. Maximum Matching (Independent Edge Set, Edge Packing) Problem
An edge packing, otherwise known as a matching, is a set of pairwise non-adjacent edges in a graph. Otherwise, an edge subset U* ⊂ U is called a matching in graph G(V,U) if no vertex v
i ∈ V is incident to more than one edge u
j ∈ U*. A maximum matching (also known as maximum-cardinality matching/edge packing) is a matching containing the largest possible number of edges [
37].
Maximum matching problems occur when a group of people, a set of devices/premises, or their combinations are to be divided into pairs by the possibility or necessity of joint work. If each edge means the possibility or necessity of joint work or use, the problem is reduced to the creation of the largest possible number of workable pairs, i.e., non-adjacent edges (maximum matching). If the pairing provides different efficiency (performance, speed of information transfer, probability of error or risk), a weight corresponding to this efficiency is assigned to the edge, and the problem is reduced to determining the maximum weighted matching.
Denoting by x
k the edges of the graph included in the matching of graph G(V,U) with N vertices and T edges and using as before the extended incidence matrix A = {a
ik} to describe the structure of the initial graph, we obtain, via analogy with the previous cases, a mathematical model of the problem on finding the maximum matching of the graph as:
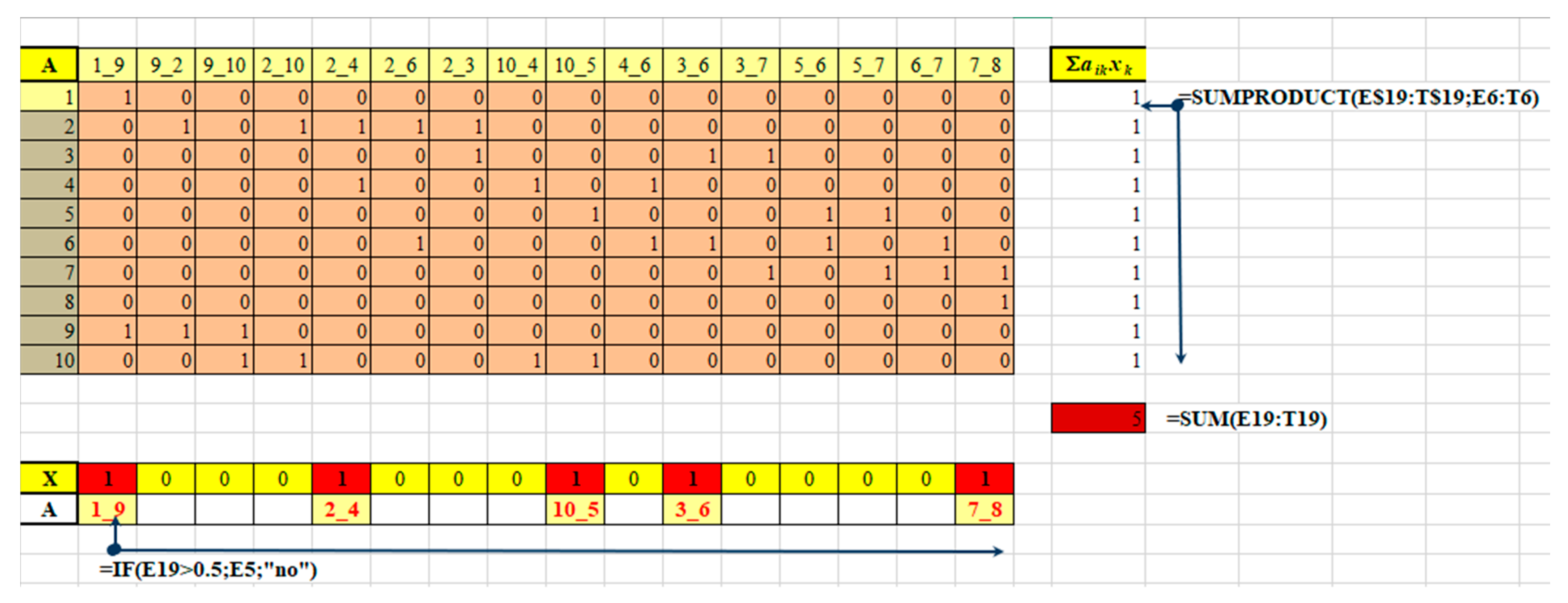
Similarly to MVC problem model (6), the model (8) is a BLP model. Applying the built-in Excel function SUMPRODUCT(array1, array2, … [array
n]) to implement the constraint
, a spreadsheet model reflecting (8) takes form shown in
Table 7 and
Table 8 and
Figure 8.
Table 7 and
Table 8 show that all model functions are linear. Transferring the model to the Solver dialog box, setting the optimization criterion to maximum, and choosing the simplex search method, we almost immediately obtain the solution {1_9, 2_3, 10_5, 4_6, 7_8} (
Figure 8). This is one of the maximum independent edge sets in graph G
2.
Applying additional constraints either on the including or excluding of certain edges in maximum matching, other variants of the maximum independent edge sets can be obtained, in particular {1_9, 2_4, 10_5, 3_6, 7_8} and {1_9, 2_3, 10_4, 5_6, 7_8} with the same matching number of 5.
3.6. Maximum Weighted Independent Set (Maximum Weighted Matching, MVM) Problem
The problem differs from the previous one in requiring to maximize not the number of edges in a matching, but its cost under the assumption that each k-th edge has a certain cost (weight) c
k. The model of this problem differs from the previous one, presented by (8), only by the objective function that takes the form of
, which necessitates introducing into the spreadsheet model a one-dimensional array of the same size as the array of unknowns containing values (weights) of all T edges c
k. After placing this array in cells E18:T18, the objective function formula in cell V17 changes to SUMPRODUCT(E18:T18; E19:T19). Other model elements remain corresponding
Table 7 and
Table 8. After transferring the problem model to the Solver dialog box and running the simplex method, we obtain the solution MVM = {9_2, 10_4, 3_7, 5_6}. The number of edges in it is less than the previously obtained matching number for maximum matching (4 vs. 5), though the total cost of them is the largest possible. If the number of edges in matching is to be kept maximum, an additional constraint
is to be introduced as V16 = 5. The obtained solution {1_9, 2_4, 10_5, 3_6, 7_8} provides a total cost of only 37 < 39.
3.7. Minimum Line Cover (MLC) Problem
Line cover (edge cover) of a graph G(V,U) is such a subset of its edges U* ⊆ U that all vertices V = {v
i} are incident to at least one edge belonging to this subset U*. To solve the problem of minimum line/edge cover (MLC, MEC) means to determine the smallest number of edges sufficient to cover all vertices of the graph [
37].
Denoting by x
k the graph edges included in the edge cover of graph G(V,U) with N vertices and T edges and using, as before, the extended incidence matrix A = {a
ik} to define the structure of the original graph G, similarly to the previous cases, we obtain a mathematical model of the MLC problem as:
Similarly to previous problem models (6–8), model (9) appears to be a BLP model. Applying the built-in Excel function SUMPRODUCT to implement the constraint
, a spreadsheet model reflecting (9) takes the form shown in
Figure 9 and
Table 9 and
Table 10.
As
Table 7 and
Table 8 show, all model functions are linear. Transferring the model to the Solver dialog box, setting the optimization criterion to minimum and choosing the simplex search method, we almost immediately obtain the solution MLC = {1_9, 2_4, 10_5, 3_6, 7_8} (
Figure 9), which is one of the G
2 minimum line covers.
Using additional constraints on the inclusion/exclusion of a certain edge, (e.g., consequently setting xk = 0 for determined MLC edges), we get two more MLC sets ({1_9, 2_3, 10_5, 4_6, 7_8}, {1_9, 2_3, 10_4, 5_6, 7_8}) with the same cover number of 5.
3.8. Minimum Weighted Line Cover (MWLC) Problem
The problem differs from the previous one by aiming to minimize not the number of edges in line cover, but the MLC total cost assuming that each k-th edge has a certain cost (weight) c
k. Thus, the model of this problem will differ from the previous one only in the objective function
. Therefore, a new one-dimensional array C containing the edge costs (weights) c
k,
is to be introduced into the spreadsheet model. After placing this array in cells E18:T18, the objective function formula in cell V17 changes to SUMPRODUCT(E18:T18; E19:T19). Other elements of the problem model stay as they are in
Table 9 and
Table 10. Transferring the model to the Solver dialog box with setting the optimization criterion to minimum and choosing the simplex search method, we almost immediately obtain the solution MWLC= {1_9, 9_10, 2_3, 4_6, 5_7, 7_8}, in which the number of edges exceeds that previously obtained for MLC (6 vs. 5) (
Figure 9), though the total cost of them is the smallest possible. If the number of edges in line cover is to be kept minimal, an additional constraint
is to be introduced similar to that described for maximum weighted matching problem.
3.9. Maximum Clique Problem
As shown above, the maximum clique in graph G can be found as the maximum independent set in the graph G** complement to G. The adjacency matrix M* of the complement graph G** can be easily obtained in Excel by subtracting 1 from each element of the adjacency matrix M of the original graph, with further multiplying it by −1 using the “Special Paste” operations with options “subtract” and “multiply”. Then, it is enough to construct the incidence matrix of the complement graph and solve the MVC problem or the maximum independent set problem. The maximum independent vertex set on graph G** will give the largest clique in graph G.
3.10. Shortest Path Problem
A model of this problem can be easily obtained based on the model for minimal edge cover of a graph by denoting by x
k the edges of the graph included in the minimal path between vertices v
l and v
m of the graph G(V,U) with N vertices and T edges and employing, as before, the extended incidence matrix A = {a
ik} of the graph to set the structure of the original graph. Similarly to the previous cases, we obtain a mathematical model of the minimal path problem as follows:
where l
k is the length of the k-th edge.
A fundamental feature of this model is treating graph G(V,U) as a directed one, i.e., passing of each of the edges is possible only in one direction. That is what provides connectedness of the path between the given vertices of the graph by setting constraints (11) reflecting the pass-through character of all intermediate path vertices. If the graph is undirected, additional dummy edges of opposite direction are introduced into the graph so that each real edge gets a multiple edge of opposite direction, and the incidence matrix is drawn for the resulting extended graph.
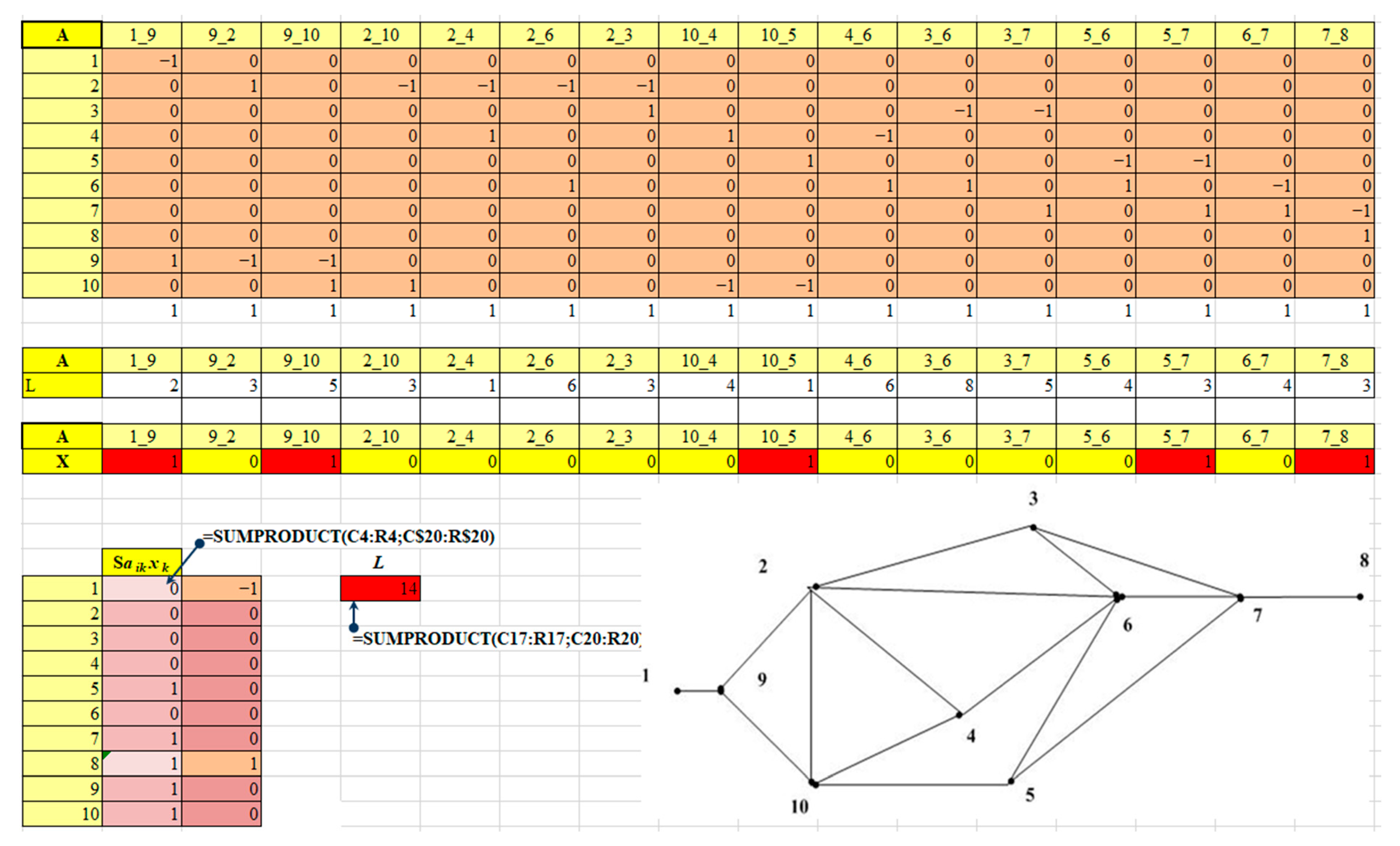
The form of a spreadsheet model of the problem of finding the shortest path between two vertices of a graph G
2 is shown in
Table 11.
All model functions (
Table 11 and
Table 12) are linear; therefore, after transferring the model to the Solver dialog box, setting the optimization criterion to minimum and choosing the simplex search method, we almost immediately obtain the shortest path {1_9, 9_10, 10_5, 5_7, 7_8} with length L = 14 (
Figure 10).
To find the minimal path between any other vertices of the graph, we have to assume one of them as initial and the other as final setting for them,
and
, respectively. All other vertices are considered intermediate ones with setting
. Changes in the spreadsheet model and examples of obtained solutions are given in
Table 13.
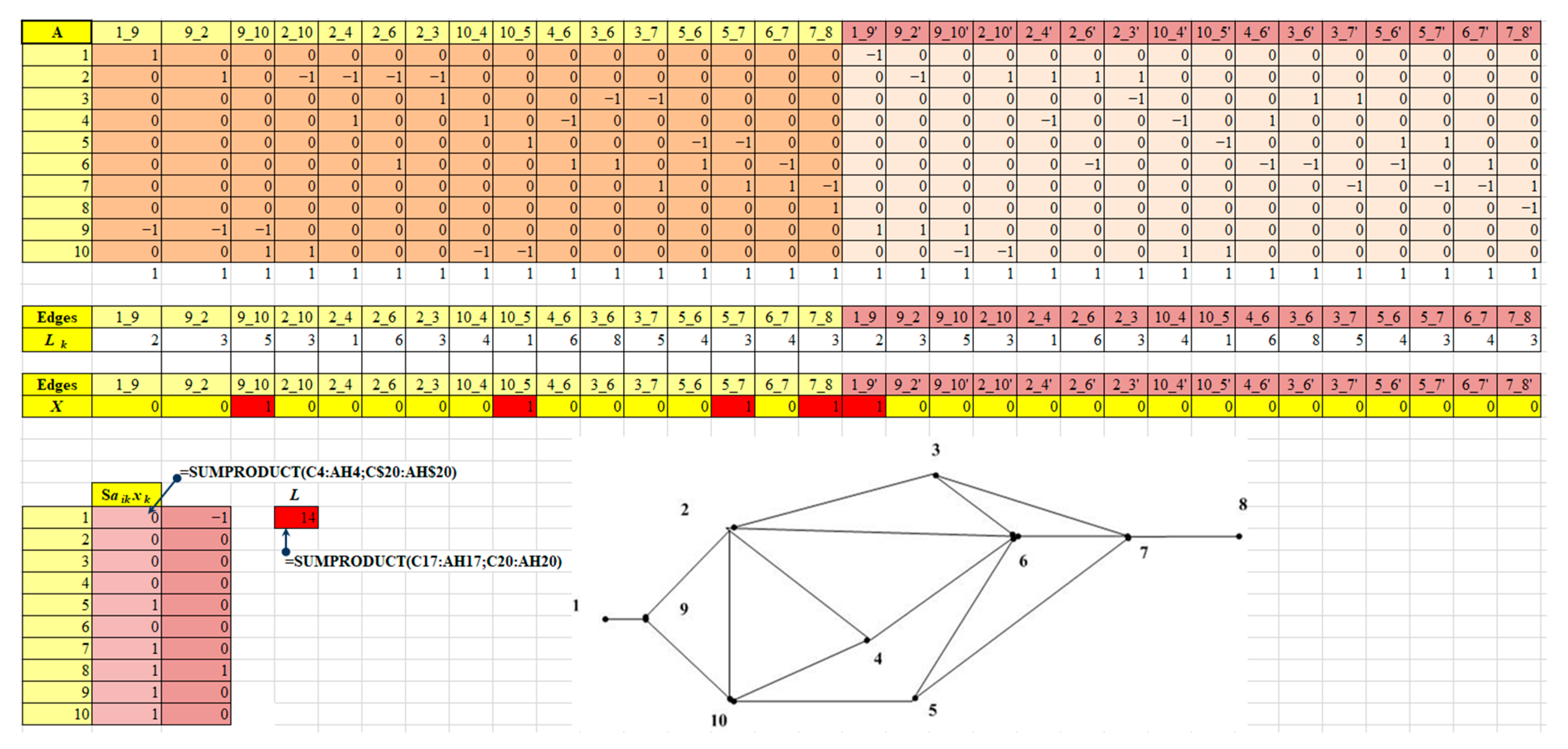
If the graph is undirected, it is necessary to introduce into it additional dummy edges multiple to each real edge of the graph and having the same length, but opposite direction. In this case, the incidence matrix on the Excel sheet is expanded twice by inserting its copy with inverted values, obtained by pasting a copy of the matrix into neighboring cells with further multiplication by −1 (Paste Special option). The size of the vector of unknowns as well as the associated set of cells and the set of cells with lengths of edges are also doubled. The expansion of the matrices is reflected in changing the formulas of the objective function and constraints (
Figure 11).
If it is necessary to find not a minimum, but a maximum path on the graph, as is the case of calculating the work duration by the critical path (CP) network method, one needs to change the optimality criterion from minimum to maximum. Solution CP = {1_9, 9_2, 2_10, 10_4, 4_6, 6_7, 7_8} and maximum path length L = 25 are obtained almost instantly.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}