
Review on the Application of the Attention Mechanism in Sensing Information Processing for Dynamic Welding Processes



Abstract
:1. Introduction
2. Sensing Technologies for the Welding Process
2.1. Basic Sensing Technologies
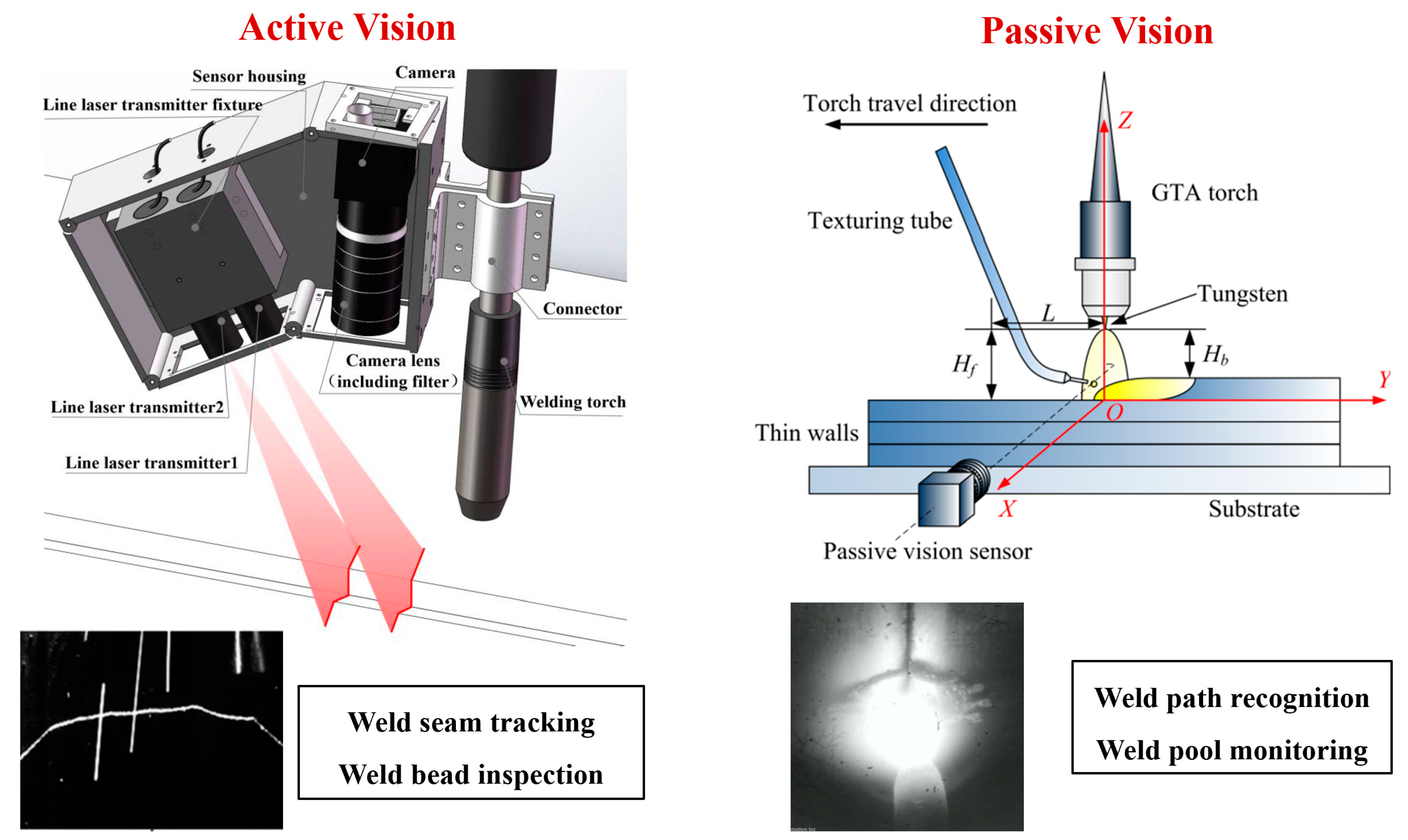
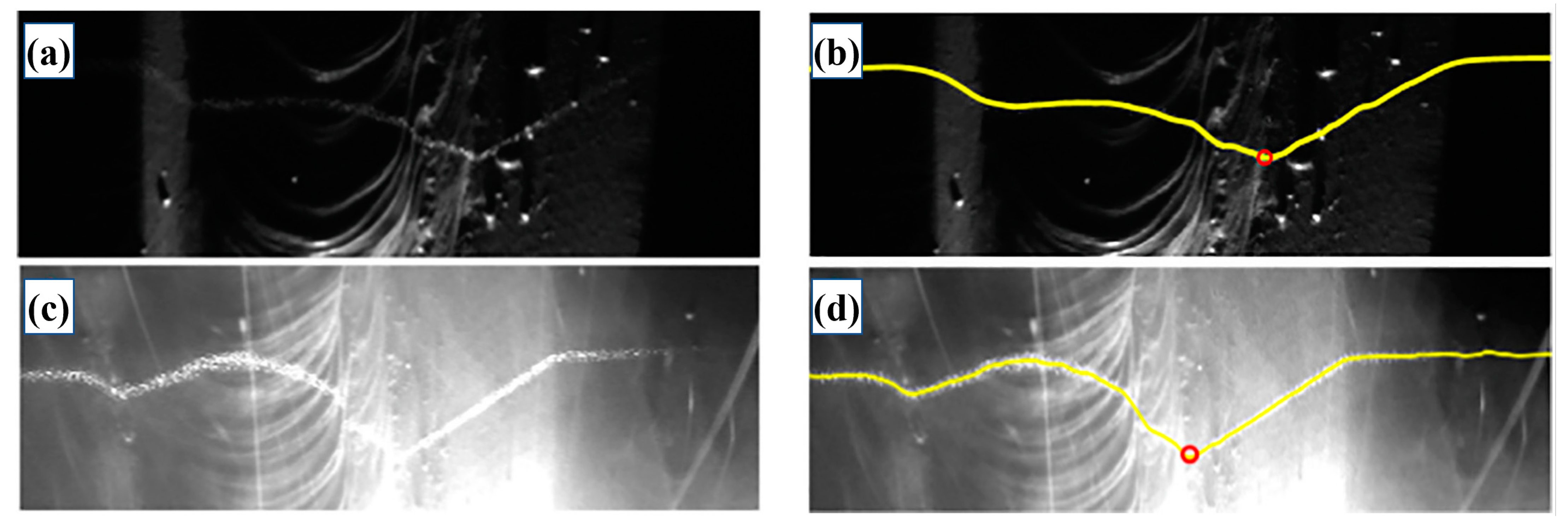
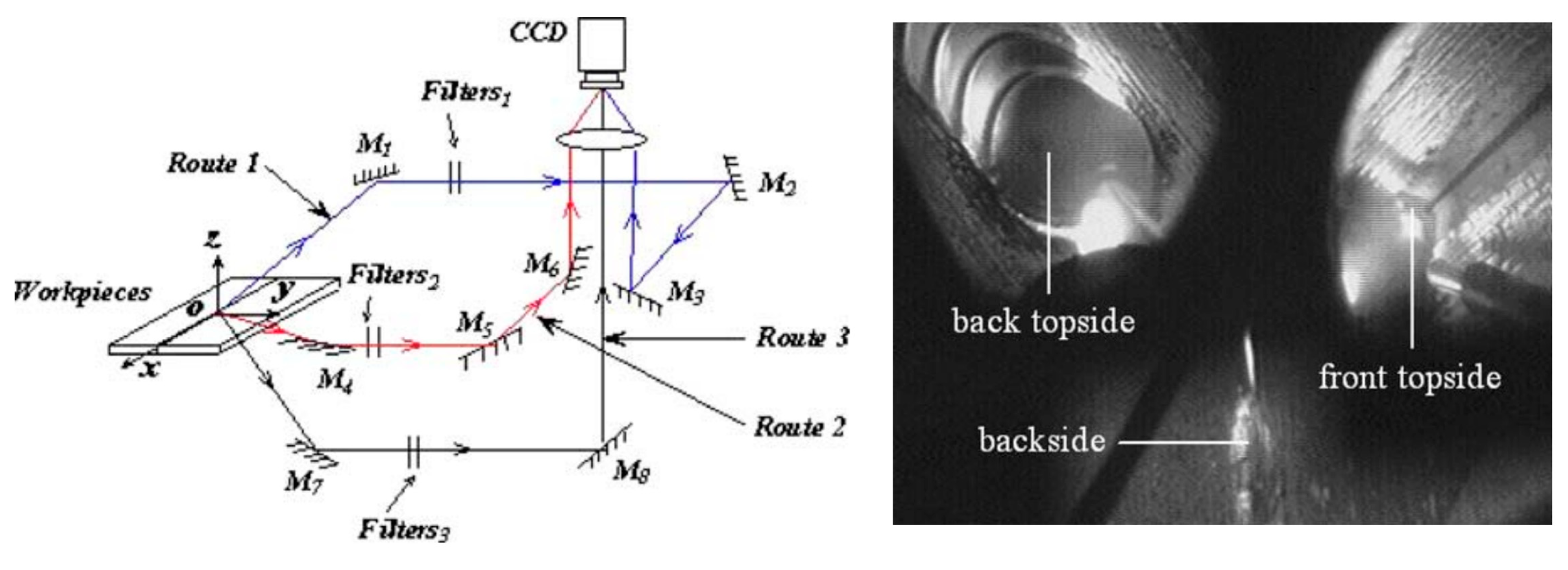
2.1.1. Vision Sensing
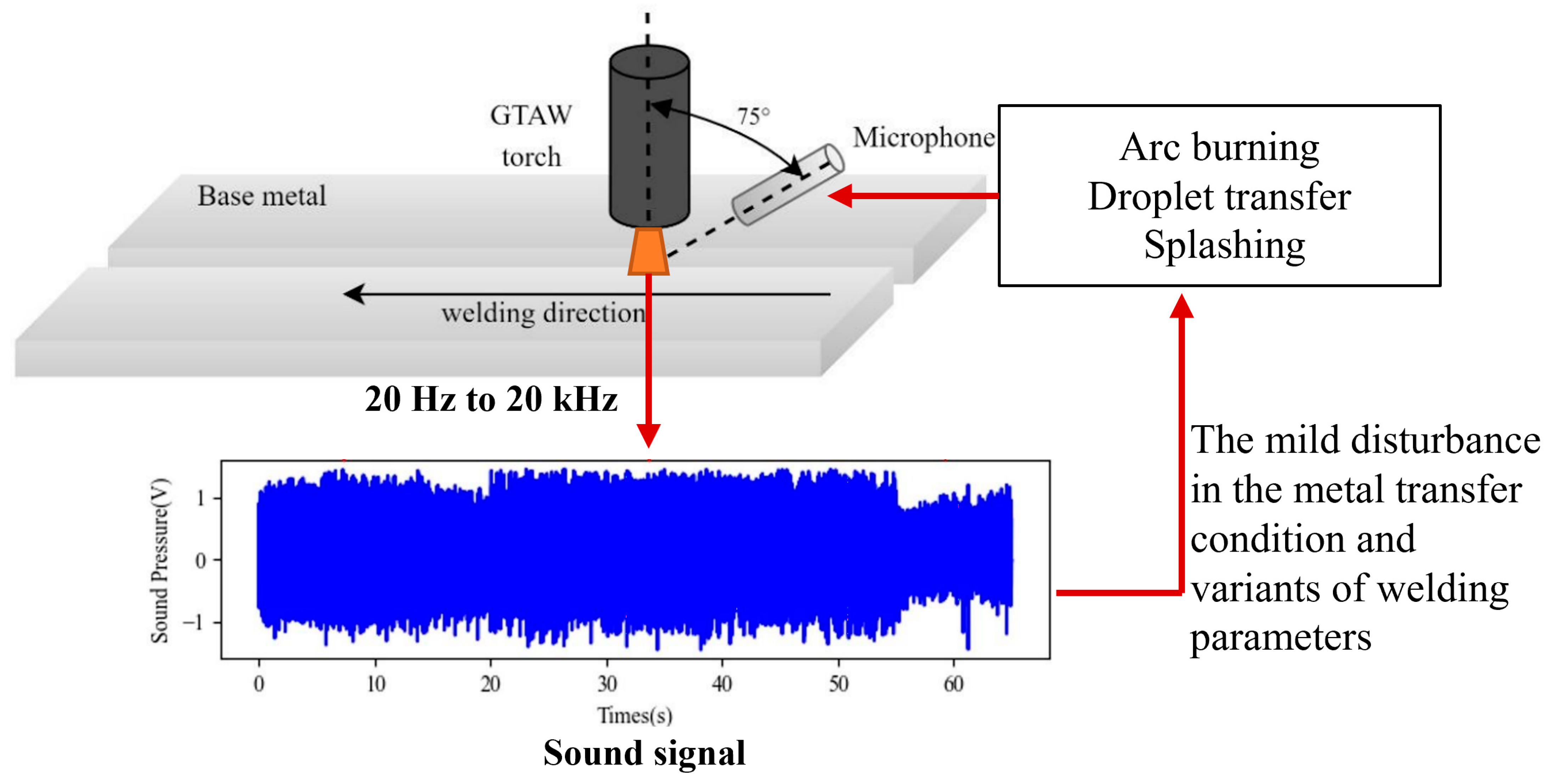
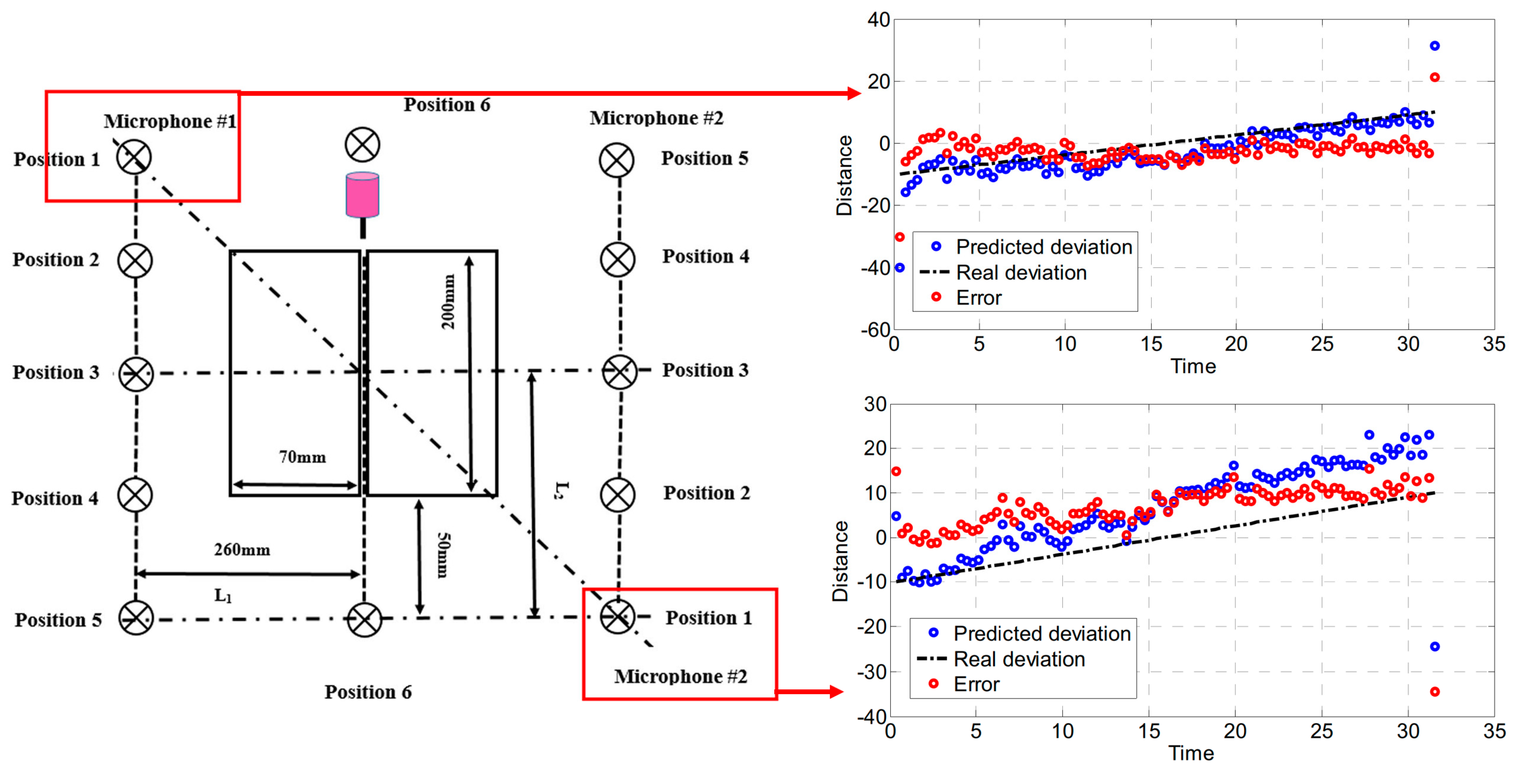
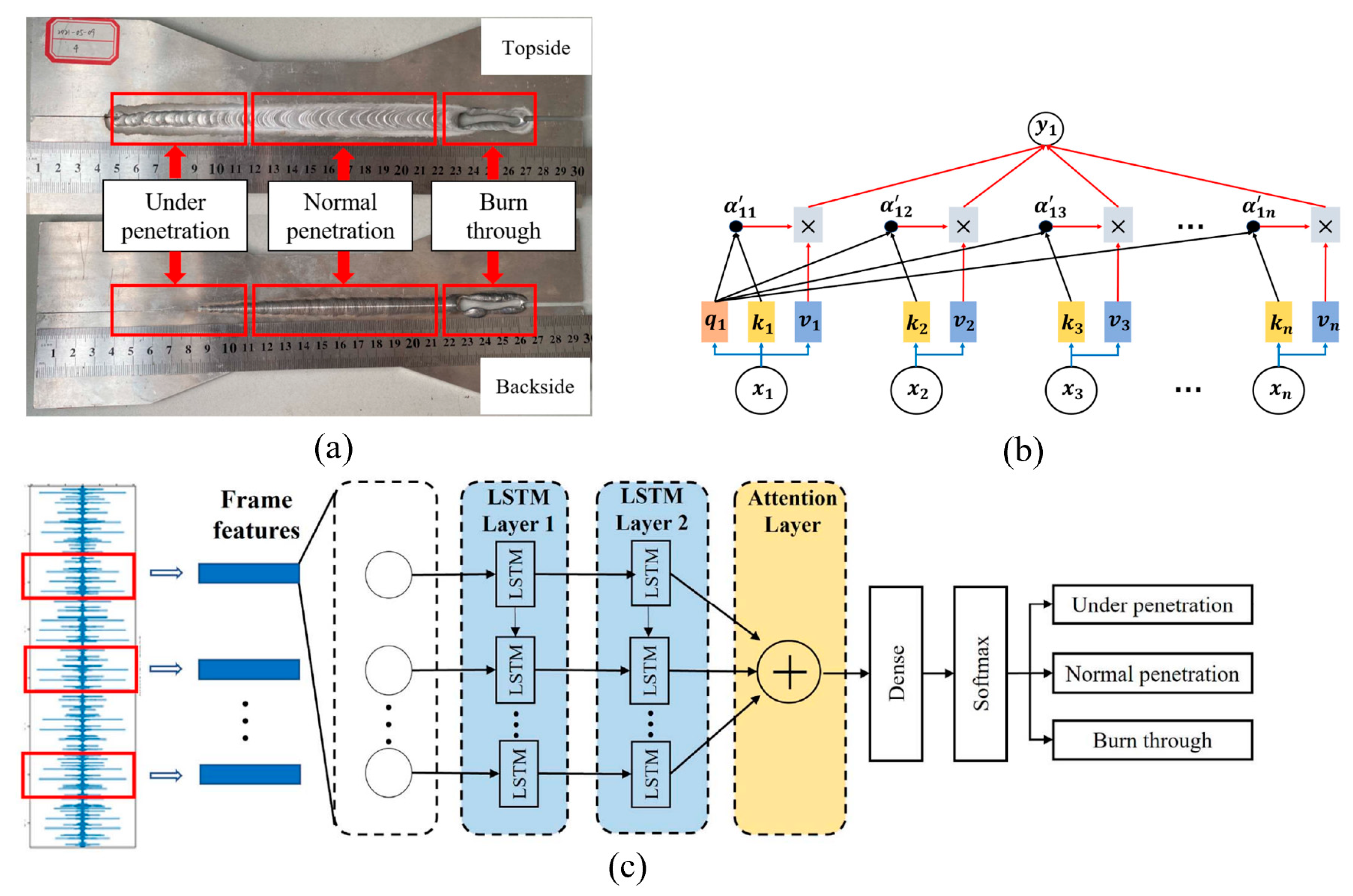
2.1.2. Acoustic Sensing
2.1.3. Arc Sensing
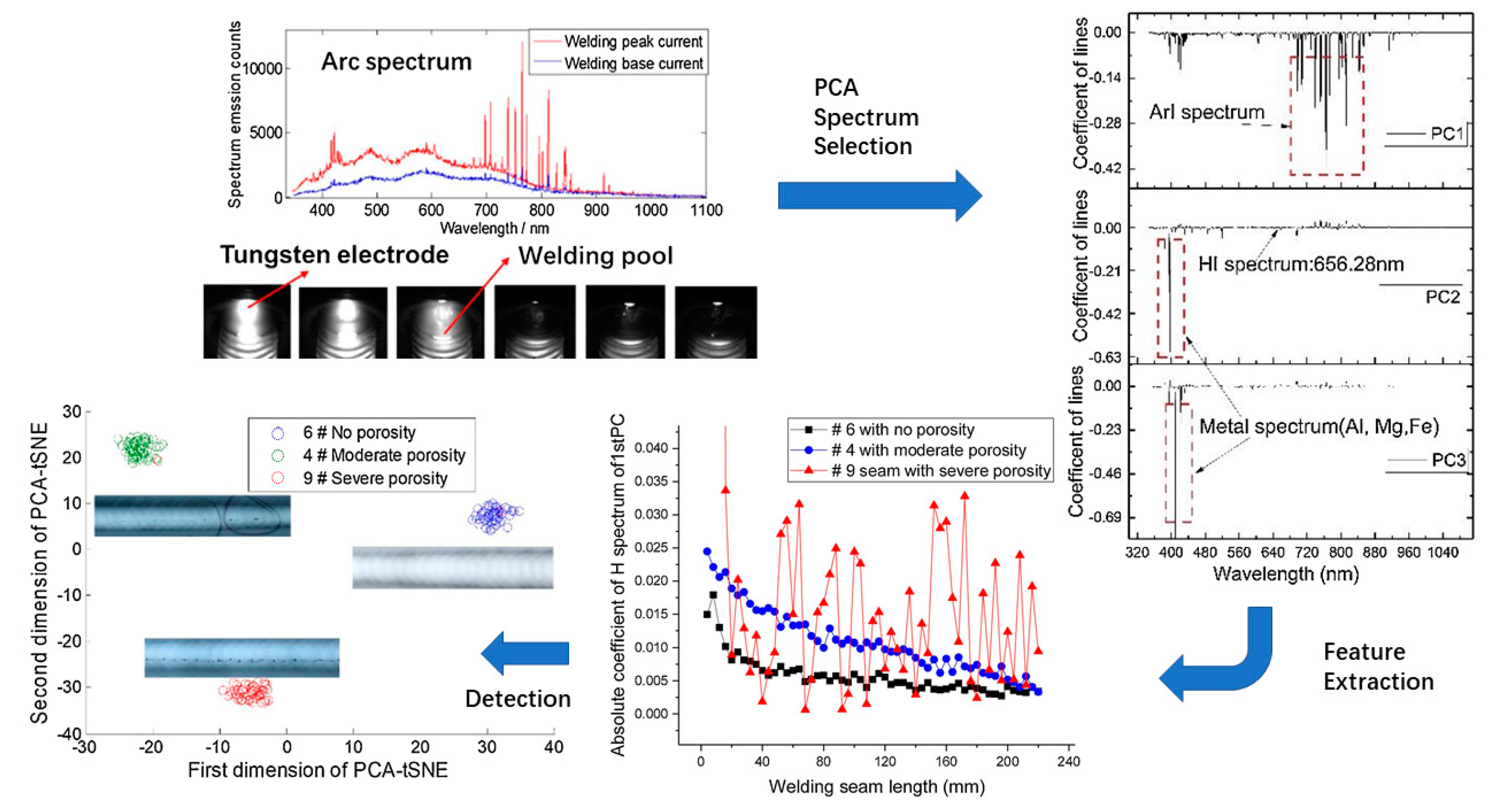
2.1.4. Spectral Sensing
2.1.5. Other Sensing Technologies
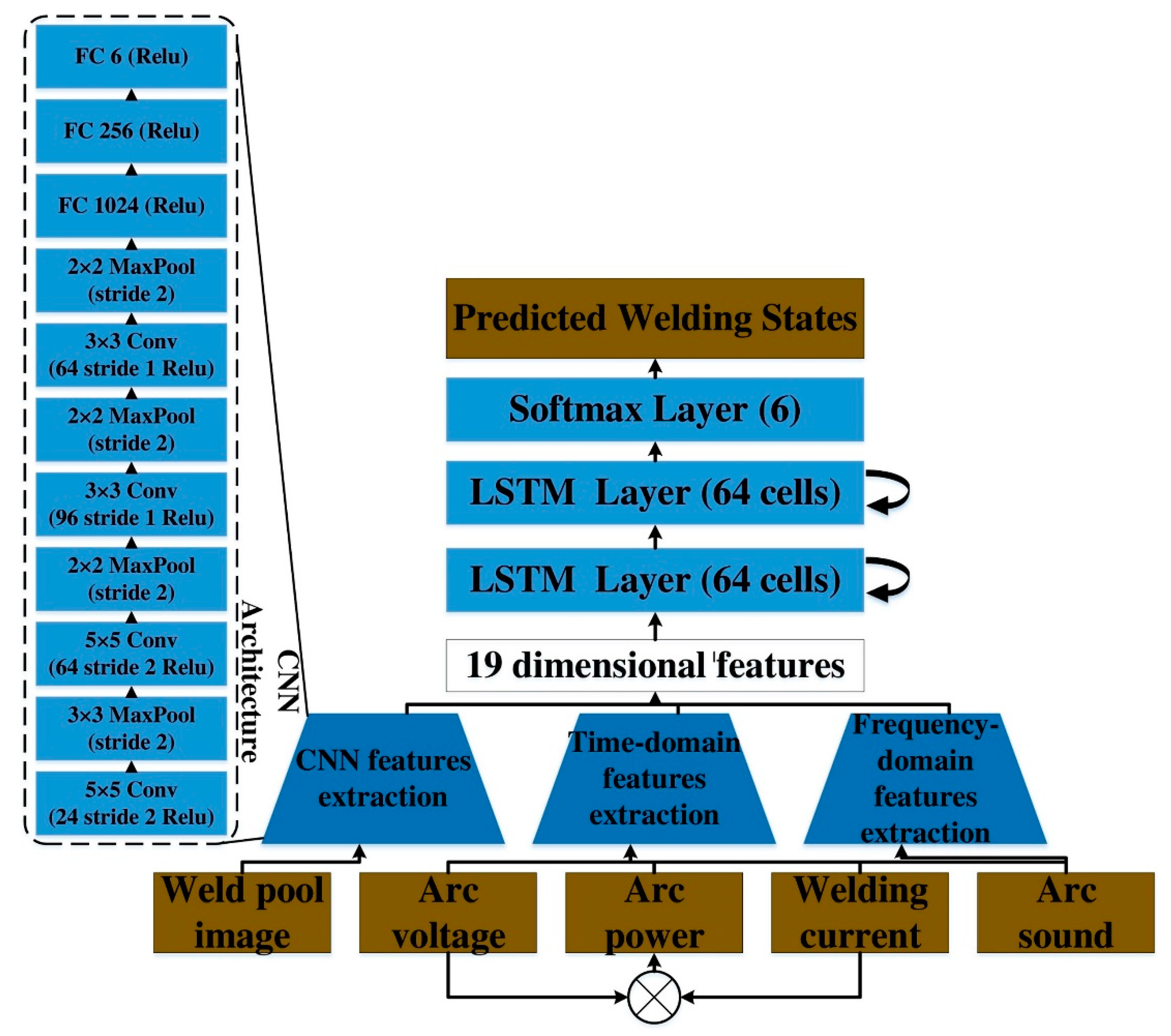
2.1.6. Multisensor Fusion
2.2. Applications of Welding Sensing Information
2.2.1. Weld Path Recognition
2.2.2. Weld Seam Tracking
2.2.3. Weld Pool Monitoring
2.2.4. Real-Time Weld Quality Monitoring
3. Deep Neural Network and Attention Mechanism for Welding Dynamical Process
3.1. Neural Network and Deep Learning
3.1.1. Network Structure of Deep Learning
3.1.2. Deep Learning in Welding
3.2. Attention Mechanism
3.2.1. Theory of the Attention Mechanism
3.2.2. Classification of Attention Mechanisms
3.2.3. Attention Mechanism in Welding Sensing
4. Conclusions and Remarks—Current Hot Issues and Further Research
4.1. Sensing Technology
4.2. Deep Learning
4.3. Attention Mechanism
4.4. Industry 4.0
Author Contributions
Funding
Conflicts of Interest
References
- Chen, S.B.; Qiu, T.; Lin, T.; Wu, Y. On intelligentized technologies for modern welding manufacturing. Chin. J. Mech. Eng. (Engl. Ed.) 2003, 16, 367–370. [Google Scholar] [CrossRef]
- Chen, S.B.; Chen, X.Z.; Qiu, T.; Li, J.Q. Acquisition of weld seam dimensional position information for arc welding robot based on vision computing. J. Intell. Robot. Syst. 2005, 43, 77–97. [Google Scholar] [CrossRef]
- Chen, S.B. On Intelligentized Welding Manufacturing. In Robotic Welding, Intelligence and Automation, Proceedings of the 2014 International Conference on Robotic Welding, Intelligence and Automation (RWIA’2014), Shanghai, China, 25–27 October 2014; The Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2015; Volume 363, pp. 3–34. [Google Scholar]
- Chen, S.B.; Wu, J.; Chen, S.B.; Wu, J. Visual sensing systems for arc welding process. In Intelligentized Methodology for Arc Welding Dynamical Processes; Springer: Berlin/Heidelberg, Germany, 2009; pp. 35–55. [Google Scholar]
- Chen, S.B.; Lou, Y.J.; Wu, L.; Zhao, D.B. Intelligent methodology for sensing, modeling and control of pulsed GTAW: Part 1—Bead-on-plate welding. Weld. J. (USA) 2000, 79, 151. [Google Scholar]
- Xu, F.; Xu, Y.; Zhang, H.; Chen, S.B. Application of sensing technology in intelligent robotic arc welding: A review. J. Manuf. Process. 2022, 79, 854–880. [Google Scholar] [CrossRef]
- Chen, S.B. Visual information acquirement and real-time control methodologies for weld pool dynamics during pulsed GTAW. Mater. Sci. Forum 2007, 539–543, 3996–4001. [Google Scholar] [CrossRef]
- Chen, S.B.; Lv, N. Research evolution on intelligentized technologies for arc welding process. J. Manuf. Process. 2014, 16, 109–122. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Q.; Liu, Y. Adaptive intelligent welding manufacturing. Weld. J. 2021, 100, 63–83. [Google Scholar] [CrossRef]
- Lu, X.Q.; Liu, W.M.; Wu, Y.X. Review of sensors and its applications in the welding robot. In Robotic Welding, Intelligence and Automation, Proceedings of the 2014 International Conference on Robotic Welding, Intelligence and Automation (RWIA’2014), Shanghai, China, 25–27 October 2014; Springer International Publishing: Cham, Switzerland, 2015; pp. 337–349. [Google Scholar]
- Zhang, Z.; Wen, G.; Chen, S.B. On-line monitoring and defects detection of robotic arc welding: A review and future challenges. In Transactions on Intelligent Welding Manufacturing; Springer: Singapore, 2019; Volume II No. 4 2018; pp. 3–28. [Google Scholar]
- Xiao, R.; Xu, Y.; Hou, Z.; Chen, C.; Chen, S.B. An adaptive feature extraction algorithm for multiple typical seam tracking based on vision sensor in robotic arc welding. Sens. Actuators A Phys. 2019, 297, 111533. [Google Scholar] [CrossRef]
- Chen, S.B.; Wu, J.; Chen, S.B.; Wu, J. Real-time control of weld pool dynamics during robotic GTAW. In Intelligentized Methodology for Arc Welding Dynamical Processes; Springer: Berlin/Heidelberg, Germany, 2009; pp. 221–273. [Google Scholar]
- Xu, Y.; Yu, H.; Zhong, J.; Lin, T.; Chen, S.B. Real-time seam tracking control technology during welding robot GTAW process based on passive vision sensor. J. Mater. Process. Technol. 2012, 212, 1654–1662. [Google Scholar] [CrossRef]
- Wu, D.; Chen, H.; Huang, Y.; Chen, S.B. Online monitoring and model-free adaptive control of weld penetration in VPPAW based on extreme learning machine. IEEE Trans. Ind. Inform. 2018, 15, 2732–2740. [Google Scholar] [CrossRef]
- Fidali, M. Detection of welding process instabilities using acoustic signals. In Advances in Technical Diagnostics, Proceedings of the 6th International Congress on Technical Diagnostic, ICDT2016, Gliwice, Poland, 12–16 September 2016; Springer International Publishing: Cham, Switzerland, 2018; Volume 10, pp. 191–201. [Google Scholar]
- Wang, Y.; Zhao, P. Noncontact acoustic analysis monitoring of plasma arc welding. Int. J. Press. Vessel. Pip. 2001, 78, 43–47. [Google Scholar] [CrossRef]
- Lv, N.; Zhong, J.; Chen, H.; Lin, T.; Chen, S.B. Real-time control of welding penetration during robotic GTAW dynamical process by audio sensing of arc length. Int. J. Adv. Manuf. Technol. 2014, 74, 235–249. [Google Scholar] [CrossRef]
- Sumesh, A.; Rameshkumar, K.; Mohandas, K.; Babu, R.S. Use of machine learning algorithms for weld quality monitoring using acoustic signature. Procedia Comput. Sci. 2015, 50, 316–322. [Google Scholar] [CrossRef]
- Madigan, R.; Quinn, P.; Smith, C.; McCowan, C.; Blachowiak, C. Arc sensing for defects in constant-voltage gas metal arc welding. Weld. J. 1999, 78, 322S–328S. [Google Scholar]
- Koseeyaporn, P.; Cook, G.E.; Strauss, A.M. Adaptive voltage control in fusion arc welding. IEEE Trans. Ind. Appl. 2000, 36, 1300–1307. [Google Scholar] [CrossRef]
- Yu, H.; Chen, H.; Xu, Y.; Zhang, Z.; Chen, S.B. Spectroscopic diagnostics of pulsed gas tungsten arc welding plasma and its effect on weld formation of aluminum-magnesium alloy. Spectrosc. Lett. 2013, 46, 350–363. [Google Scholar] [CrossRef]
- Huang, Y.; Zhao, D.; Chen, H.; Yang, L.; Chen, S.B. Porosity detection in pulsed GTA welding of 5A06 Al alloy through spectral analysis. J. Mater. Process. Technol. 2018, 259, 332–340. [Google Scholar] [CrossRef]
- Huang, Y.; Wu, D.; Zhang, Z.; Chen, H.; Chen, S.B. EMD-based pulsed TIG welding process porosity defect detection and defect diagnosis using GA-SVM. J. Mater. Process. Technol. 2017, 239, 92–102. [Google Scholar] [CrossRef]
- Zhang, Z.; Ren, W.; Yang, Z.; Wen, G. Real-time seam defect identification for Al alloys in robotic arc welding using optical spectroscopy and integrating learning. Measurement 2020, 156, 107546. [Google Scholar] [CrossRef]
- Su, N.; Wang, J.; Xu, G.; Zhu, J.; Jiang, Y. Infrared visual sensing detection of groove width for swing arc narrow gap welding. Sensors 2022, 22, 2555. [Google Scholar] [CrossRef]
- Yu, P.; Xu, G.; Gu, X.; Zhou, G.; Tian, Y. A low-cost infrared sensing system for monitoring the MIG welding process. Int. J. Adv. Manuf. Technol. 2017, 92, 4031–4038. [Google Scholar] [CrossRef]
- Passini, A.; Oliveira, A.C.D.; Riva, R.; Travessa, D.N.; Cardoso, K.R. Ultrasonic inspection of AA6013 laser welded joints. Mater. Res. 2011, 14, 417–422. [Google Scholar] [CrossRef]
- Rokhlin, S.I. In-process radiographic evaluation of arc welding. NDT E Int. 1996, 3, 189. [Google Scholar]
- Chen, X.Z.; Chen, S.B. The autonomous detection and guiding of start welding position for arc welding robot. Ind. Robot Int. J. 2010, 37, 70–78. [Google Scholar] [CrossRef]
- Wei, S.; Ma, H.; Lin, T.; Chen, S.B. Autonomous guidance of initial welding position with “single camera and double positions” method. Sens. Rev. 2010, 30, 62–68. [Google Scholar] [CrossRef]
- Chen, X.; Chen, S.; Lin, T.; Lei, Y. Practical method to locate the initial weld position using visual technology. Int. J. Adv. Manuf. Technol. 2006, 30, 663–668. [Google Scholar] [CrossRef]
- Fan, J.; Jing, F.; Yang, L.; Teng, L.; Tan, M. A precise initial weld point guiding method of micro-gap weld based on structured light vision sensor. IEEE Sens. J. 2018, 19, 322–331. [Google Scholar] [CrossRef]
- Peng, R.; Navarro-Alarcon, D.; Wu, V.; Yang, W. A Point Cloud-Based Method for Automatic Groove Detection and Trajectory Generation of Robotic Arc Welding Tasks. In Proceedings of the 2020 17th International Conference on Ubiquitous Robots (UR), Kyoto, Japan, 22–26 June 2020. [Google Scholar]
- Kim, J.; Lee, J.; Chung, M.; Shin, Y.G. Multiple weld seam extraction from rgb-depth images for automatic robotic welding via point cloud registration. Multimed. Tools Appl. 2021, 80, 9703–9719. [Google Scholar] [CrossRef]
- Shah, H.N.M.; Sulaiman, M.; Shukor, A.Z.; Kamis, Z.; Ab Rahman, A. Butt welding joints recognition and location identification by using local thresholding. Robot. Comput.-Integr. Manuf. 2018, 51, 181–188. [Google Scholar] [CrossRef]
- Wang, H.; Lei, T.; Rong, Y.; Shao, W.; Huang, Y. Arc length stable method of GTAW based on adaptive Kalman filter. J. Manuf. Process. 2021, 63, 130–138. [Google Scholar] [CrossRef]
- Lv, N.; Xu, Y.; Zhang, Z.; Wang, J.; Chen, B.; Chen, S. Audio sensing and modeling of arc dynamic characteristic during pulsed Al alloy GTAW process. Sens. Rev. 2013, 33, 141–156. [Google Scholar] [CrossRef]
- Yue, L.; Nian, L.; Changchuan, L. Research on weld joint tracking system for arc welding robots based on sine weaving weld. Mach. Electron. 2016, 34, 76–80. [Google Scholar]
- Baek, D.; Moon, H.S.; Park, S.H. Development of an automatic orbital welding system with robust weaving width control and a seam-tracking function for narrow grooves. Int. J. Adv. Manuf. Technol. 2017, 93, 767–777. [Google Scholar] [CrossRef]
- Jeong, S.K.; Lee, G.Y.; Lee, W.K.; Kim, S.B. Development of high speed rotating arc sensor and seam tracking controller for welding robots. In Proceedings of the ISIE 2001. 2001 IEEE International Symposium on Industrial Electronics Proceedings (Cat. No. 01TH8570), Pusan, Republic of Korea, 12–16 June 2001; Volume 2, pp. 845–850. [Google Scholar]
- Lan, H.; Zhang, H.; Chen, S.; Sheng, K.; Zhao, D. Correlation of arc sound and arc-sidewall position in narrow gap MAG welding. J. Mech. Eng. 2014, 50, 38–43. [Google Scholar] [CrossRef]
- Lv, N.; Fang, G.; Xu, Y.-l.; Zhao, H.; Chen, S.-b.; Zou, J.-j. Real-time monitoring of welding path in pulse metal-inert gas robotic welding using a dual-microphone array. Int. J. Adv. Manuf. Technol. 2017, 90, 2955–2968. [Google Scholar]
- Xiao, R.; Xu, Y.; Hou, Z.; Chen, C.; Chen, S. A feature extraction algorithm based on improved Snake model for multi-pass seam tracking in robotic arc welding. J. Manuf. Process. 2021, 72, 48–60. [Google Scholar] [CrossRef]
- He, Y.; Ma, G.; Chen, S. Autonomous decision-making of welding position during multipass GMAW with T-joints: A Bayesian network approach. IEEE Trans. Ind. Electron. 2021, 69, 3909–3917. [Google Scholar] [CrossRef]
- Zou, Y.; Wang, Y.; Zhou, W.; Chen, X. Real-time seam tracking control system based on line laser visions. Opt. Laser Technol. 2018, 103, 182–192. [Google Scholar] [CrossRef]
- Subashini, L.; Vasudevan, M. Adaptive neuro-fuzzy inference system (ANFIS)-based models for predicting the weld bead width and depth of penetration from the infrared thermal image of the weld pool. Metall. Mater. Trans. B 2012, 43, 145–154. [Google Scholar] [CrossRef]
- Vasudevan, M.; Chandrasekhar, N.; Maduraimuthu, V.; Bhaduri, A.K.; Raj, B. Real-time monitoring of weld pool during GTAW using infra-red thermography and analysis of infra-red thermal images. Weld. World 2011, 55, 83–89. [Google Scholar] [CrossRef]
- Chandrasekhar, N.; Vasudevan, M.; Bhaduri, A.K.; Jayakumar, T. Intelligent modeling for estimating weld bead width and depth of penetration from infra-red thermal images of the weld pool. J. Intell. Manuf. 2015, 26, 59–71. [Google Scholar] [CrossRef]
- Wu, D.; Chen, H.; Huang, Y.; He, Y.; Hu, M.; Chen, S. Monitoring of weld joint penetration during variable polarity plasma arc welding based on the keyhole characteristics and PSO-ANFIS. J. Mater. Process. Technol. 2017, 239, 113–124. [Google Scholar] [CrossRef]
- Fan, C.; Lv, F.; Chen, S. Visual sensing and penetration control in aluminum alloy pulsed gta welding. Int. J. Adv. Manuf. Technol. 2009, 42, 126–137. [Google Scholar] [CrossRef]
- Guangjun, Z.; Zhihong, Y.; Lin, W. Reconstructing a three-dimensional P-GMAW weld pool shape from a two-dimensional visual image. Meas. Sci. Technol. 2006, 17, 1877. [Google Scholar] [CrossRef]
- Xiong, J.; Shi, M.; Liu, Y.; Yin, Z. Virtual binocular vision sensing and control of molten pool width for gas metal arc additive manufactured thin-walled components. Addit. Manuf. 2020, 33, 101121. [Google Scholar] [CrossRef]
- Liu, Y.K.; Zhang, Y.M. Model-based predictive control of weld penetration in gas tungsten arc welding. IEEE Trans. Control Syst. Technol. 2013, 22, 955–966. [Google Scholar] [CrossRef]
- Chen, C.; Lv, N.; Chen, S.B. Welding penetration monitoring for pulsed GTAW using visual sensor based on AAM and random forests. J. Manuf. Process. 2021, 63, 152–162. [Google Scholar] [CrossRef]
- Feng, Y.; Chen, Z.; Wang, D.; Chen, J.; Feng, Z. DeepWelding: A deep learning enhanced approach to GTAW using multisource sensing images. IEEE Trans. Ind. Inform. 2019, 16, 465–474. [Google Scholar] [CrossRef]
- Li, C.; Shi, Y.; Du, L.; Yufen, G.; Zhu, M. Real-time measurement of weld pool oscillation frequency in GTAW-P process. J. Manuf. Process. 2017, 29, 419–426. [Google Scholar] [CrossRef]
- Shi, Y.; Zhang, G.; Ma, X.J.; Gu, Y.F.; Huang, J.K.; Fan, D. Laser-vision-based measurement and analysis of weld pool oscillation frequency in GTAW-P. Weld. J. 2015, 94, 176s–187s. [Google Scholar]
- Chen, C.; Xiao, R.; Chen, H.; Lv, N.; Chen, S. Arc sound model for pulsed GTAW and recognition of different penetration states. Int. J. Adv. Manuf. Technol. 2020, 108, 3175–3191. [Google Scholar] [CrossRef]
- Zhao, Z.; Lv, N.; Xiao, R.; Liu, Q.; Chen, S. Recognition of penetration states based on arc sound of interest using VGG-SE network during pulsed GTAW process. J. Manuf. Process. 2023, 87, 81–96. [Google Scholar] [CrossRef]
- Zhang, Z.; Wen, G.; Chen, S. Audible sound-based intelligent evaluation for aluminum alloy in robotic pulsed GTAW: Mechanism, feature selection, and defect detection. IEEE Trans. Ind. Inform. 2017, 14, 2973–2983. [Google Scholar] [CrossRef]
- Xiao, Y.H.; Den Ouden, G. A study of GTA weld pool oscillation. Weld. J. 1990, 69, 289. [Google Scholar]
- Yoo, C.D.; Richardson, R.W. An experimental study on sensitvity and signal characteristics of welds pool oscillation. Trans. Jpn. Weld. Soc. 1993, 24, 54–62. [Google Scholar]
- Huang, Y.; Yang, D.; Wang, K.; Wang, L.; Fan, J. A quality diagnosis method of GMAW based on improved empirical mode decomposition and extreme learning machine. J. Manuf. Process. 2020, 54, 120–128. [Google Scholar] [CrossRef]
- He, K.; Li, X. A quantitative estimation technique for welding quality using local mean decomposition and support vector machine. J. Intell. Manuf. 2016, 27, 525–533. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, H.; Lv, N.; Chen, S. Real-time defect detection in pulsed GTAW of Al alloys through on-line spectroscopy. J. Mater. Process. Technol. 2013, 213, 1146–1156. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, L.; Wen, G. Study of inner porosity detection for Al-Mg alloy in arc welding through on-line optical spectroscopy: Correlation and feature reduction. J. Manuf. Process. 2019, 39, 79–92. [Google Scholar] [CrossRef]
- Huang, Y.; Yuan, Y.; Yang, L.; Wu, D.; Chen, S. Real-time monitoring and control of porosity defects during arc welding of aluminum alloys. J. Mater. Process. Technol. 2020, 286, 116832. [Google Scholar] [CrossRef]
- Xu, J.; Yu, H.; Xiao, R.; Liu, Q.; Chen, S. Features detection of Al alloy porosity during GTAW process based on arc spectrum and improved porosity-focus decision tree. J. Manuf. Process. 2023, 88, 71–83. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Kleijn, C.R.; Richardson, I.M. A simulation-based approach to characterise melt-pool oscillations during gas tungsten arc welding. Int. J. Heat Mass Transf. 2021, 164, 120535. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Kleijn, C.R.; Hermans, M.J.; Richardson, I.M. The effects of process parameters on melt-pool oscillatory behaviour in gas tungsten arc welding. J. Phys. D Appl. Phys. 2021, 54, 275303. [Google Scholar] [CrossRef]
- Shrestha, A.; Mahmood, A. Review of deep learning algorithms and architectures. IEEE Access 2019, 7, 53040–53065. [Google Scholar] [CrossRef]
- Fukushima, K. Neocognitron: A self-organizing neural network model for a mechanism of pattern recognition unaffected by shift in position. Biol. Cybern. 1980, 36, 193–202. [Google Scholar] [CrossRef] [PubMed]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Chan, W.; Jaitly, N.; Le, Q.; Vinyals, O. Listen, attend and spell: A neural network for large vocabulary conversational speech recognition. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 4960–4964. [Google Scholar]
- Chen, X.; Sun, B.; Zhang, C.; Lou, X.; Zhao, Z.; Han, J. Wire composition and shielding gas flow monitoring based on image and spectrum multimodal network. Measurement 2020, 160, 107797. [Google Scholar] [CrossRef]
- Zhang, Y.; You, D.; Gao, X.; Zhang, N.; Gao, P.P. Welding defects detection based on deep learning with multiple optical sensors during disk laser welding of thick plates. J. Manuf. Syst. 2019, 51, 87–94. [Google Scholar] [CrossRef]
- Jiao, W.; Wang, Q.; Cheng, Y.; Zhang, Y. End-to-end prediction of weld penetration: A deep learning and transfer learning based method. J. Manuf. Process. 2021, 63, 191–197. [Google Scholar] [CrossRef]
- Wang, B.; Li, Y.; Luo, Y.; Li, X.; Freiheit, T. Early event detection in a deep-learning driven quality prediction model for ultrasonic welding. J. Manuf. Syst. 2021, 60, 325–336. [Google Scholar] [CrossRef]
- Zou, Y.; Zhu, M.; Chen, X. A robust detector for automated welding seam tracking system. J. Dyn. Syst. Meas. Control 2021, 143, 071001. [Google Scholar] [CrossRef]
- Wang, X.J.; Zhou, J.H.; Yan, H.C.; Pang, C.K. Quality monitoring of spot welding with advanced signal processing and data-driven techniques. Trans. Inst. Meas. Control 2018, 40, 2291–2302. [Google Scholar] [CrossRef]
- Liu, T.; Bao, J.; Wang, J.; Zhang, Y. A hybrid CNN–LSTM algorithm for online defect recognition of CO2 welding. Sensors 2018, 18, 4369. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Xiao, R.; Chen, H.; Lv, N.; Chen, S. Prediction of welding quality characteristics during pulsed GTAW process of aluminum alloy by multisensory fusion and hybrid network model. J. Manuf. Process. 2021, 68, 209–224. [Google Scholar] [CrossRef]
- Yang, L.; Song, S.; Fan, J.; Huo, B.; Li, E.; Liu, Y. An automatic deep segmentation network for pixel-level welding defect detection. IEEE Trans. Instrum. Meas. 2021, 71, 5003510. [Google Scholar] [CrossRef]
- Corbetta, M.; Shulman, G.L. Control of goal-directed and stimulus-driven attention in the brain. Nat. Rev. Neurosci. 2002, 3, 201–215. [Google Scholar] [CrossRef] [PubMed]
- Tsotsos, J.K.; Culhane, S.M.; Wai, W.Y.K.; Lai, Y.; Davis, N.; Nuflo, F. Modeling visual attention via selective tuning. Artif. Intell. 1995, 78, 507–545. [Google Scholar] [CrossRef]
- Niu, Z.; Zhong, G.; Yu, H. A review on the attention mechanism of deep learning. Neurocomputing 2021, 452, 48–62. [Google Scholar] [CrossRef]
- Letarte, G.; Paradis, F.; Giguère, P.; Laviolette, F. Importance of self-attention for sentiment analysis. In Proceedings of the 2018 EMNLP Workshop BlackboxNLP: Analyzing and Interpreting Neural Networks for NLP, Brussels, Belgium, 1 November 2018; pp. 267–275. [Google Scholar]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural machine translation by jointly learning to align and translate. arXiv 2014, arXiv:1409.0473. [Google Scholar]
- Luong, M.T.; Pham, H.; Manning, C.D. Effective approaches to attention-based neural machine translation. arXiv 2015, arXiv:1508.04025. [Google Scholar]
- Martins, A.; Astudillo, R. From softmax to sparsemax: A sparse model of attention and multi-label classification. In Proceedings of the International Conference on Machine Learning, New York, NY, USA, 20–22 June 2016; pp. 1614–1623. [Google Scholar]
- Kim, Y.; Denton, C.; Hoang, L.; Rush, A.M. Structured attention networks. arXiv 2017, arXiv:1702.00887. [Google Scholar]
- Williams, R.J. Simple statistical gradient-following algorithms for connectionist reinforcement learning. Mach. Learn. 1992, 8, 229–256. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Zhao, Z.; Lv, N.; Xiao, R.; Chen, S. A novel penetration state recognition method based on LSTM with auditory attention during pulsed GTAW. IEEE Trans. Ind. Inform. 2022, 19, 9565–9575. [Google Scholar] [CrossRef]
- Wang, L.; Shen, Q. Visual inspection of welding zone by boundary-aware semantic segmentation algorithm. IEEE Trans. Instrum. Meas. 2020, 70, 5001309. [Google Scholar] [CrossRef]
- Zhou, J.; Xi, Z.; Wang, S.; Yang, B.; Zhang, Y.; Zhang, Y. A real spatial–temporal attention denoising network for nugget quality detection in resistance spot weld. J. Intell. Manuf. 2023, 9, 1–22. [Google Scholar] [CrossRef]
- Xiao, M.; Yang, B.; Wang, S.; Zhang, Z.; Tang, X.; Kang, L. A feature fusion enhanced multiscale CNN with attention mechanism for spot-welding surface appearance recognition. Comput. Ind. 2022, 135, 103583. [Google Scholar] [CrossRef]
- Liu, T.; Wang, J.; Huang, X.; Lu, Y.; Bao, J. 3DSMDA-Net: An improved 3DCNN with separable structure and multi-dimensional attention for welding status recognition. J. Manuf. Syst. 2022, 62, 811–822. [Google Scholar] [CrossRef]
- Liu, T.; Zheng, P.; Chen, H.; Zhang, L. An attention-based bilinear feature extraction mechanism for fine-grained laser welding molten pool/keyhole defect recognition. J. Manuf. Process. 2023, 87, 150–159. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensing Signal | Advantages | Objectives | Real-Time Capabilities |
|---|---|---|---|
| Visual | Equipment simplicity Mature supporting algorithms Good stability | Weld path recognition Weld seam tracking Weld pool monitoring Weld bead inspection Weld quality diagnosis | Dynamic process |
| Arc | Equipment simplicity Reflect the heat input Reflect the arc length and stability | Weld seam tracking Weld quality diagnosis | Dynamic process |
| Acoustic | Equipment simplicity Detect the metal transmission condition Good sensitivity | Weld seam tracking Weld quality diagnosis | Dynamic process |
| Spectral | Equipment simplicity Information from arc emission Good sensitivity Monitor the alterations of elements | Weld quality diagnosis (Internal) | Dynamic process |
| Infrared | Record temperature data Resistance to welding noise | Weld pool monitoring Weld quality diagnosis | Dynamic process |
| Ultrasonic | Internal defect detection | Weld quality diagnosis (Internal) | Post-weld |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Liu, Q.; Xu, Y.; Xiao, R.; Hou, Z.; Chen, S. Review on the Application of the Attention Mechanism in Sensing Information Processing for Dynamic Welding Processes. J. Manuf. Mater. Process. 2024, 8, 22. https://doi.org/10.3390/jmmp8010022
Xu J, Liu Q, Xu Y, Xiao R, Hou Z, Chen S. Review on the Application of the Attention Mechanism in Sensing Information Processing for Dynamic Welding Processes. Journal of Manufacturing and Materials Processing. 2024; 8(1):22. https://doi.org/10.3390/jmmp8010022
Chicago/Turabian StyleXu, Jingyuan, Qiang Liu, Yuqing Xu, Runquan Xiao, Zhen Hou, and Shanben Chen. 2024. "Review on the Application of the Attention Mechanism in Sensing Information Processing for Dynamic Welding Processes" Journal of Manufacturing and Materials Processing 8, no. 1: 22. https://doi.org/10.3390/jmmp8010022