In this section, we introduce the research hypotheses for the discussed issues, the required prior knowledge and key concepts from related fields, and the achievements of previous research.
3.1. Network Modeling
Network modeling plays a pivotal role in the research, design, and operation of networks. Scientific network modeling can assist us in gaining a profound understanding of network structures and relationships, accurately unveiling the intrinsic patterns and characteristics of networks. The relationship between networks and graph theory is inseparable. Graph theory offers a concise and powerful method for representing various complex relationships within networks, whether they are computer networks [
20], satellite networks [
21], transportation networks [
22], social networks [
23], or networks from other domains. In networks, nodes can correspond to vertices in graph theory, while links can correspond to edges.
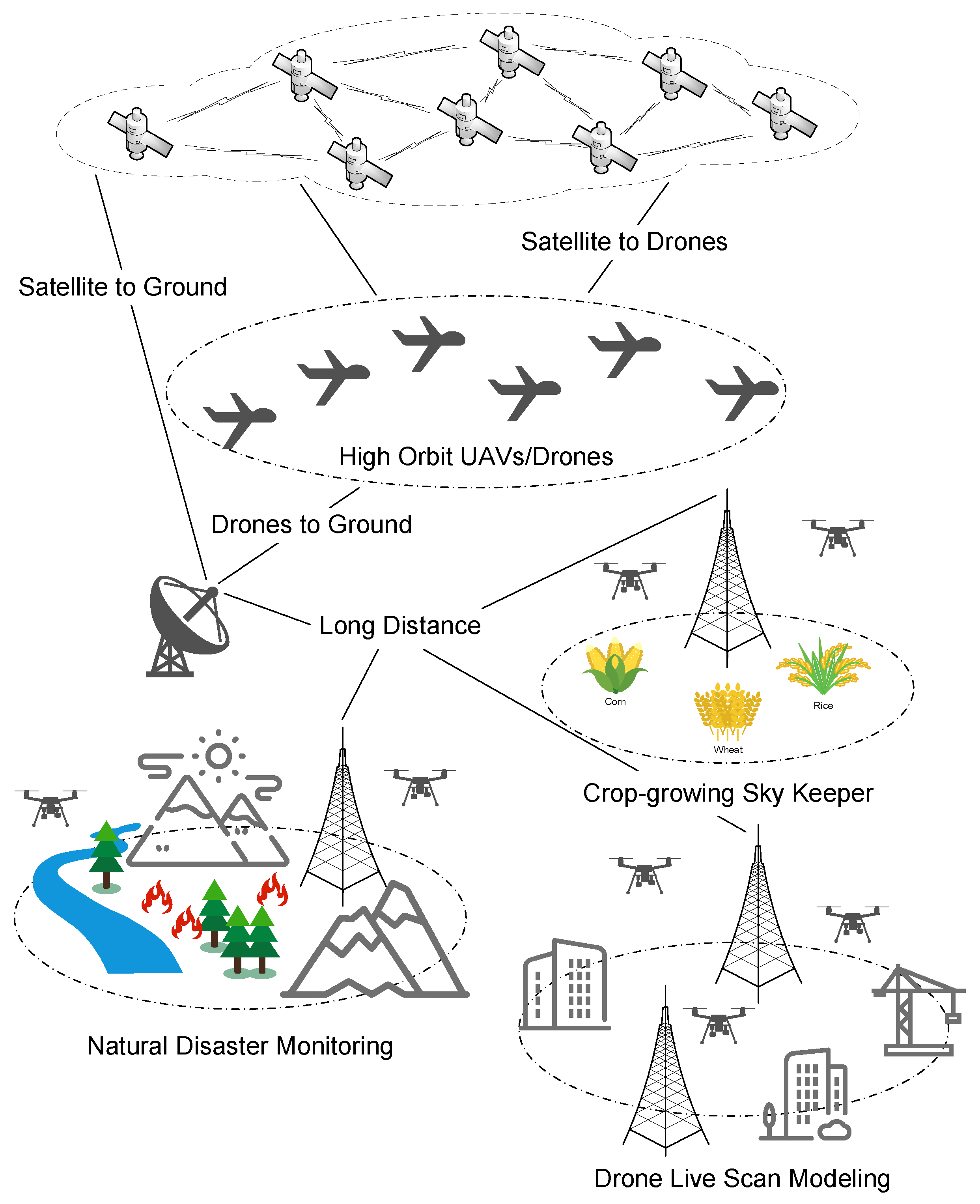
If the time-varying satellite–UAV-integrated networks can be abstracted as a graph, we can leverage the rich tools and methods of graph theory to analyze and understand the network’s structure, characteristics, and behavior.
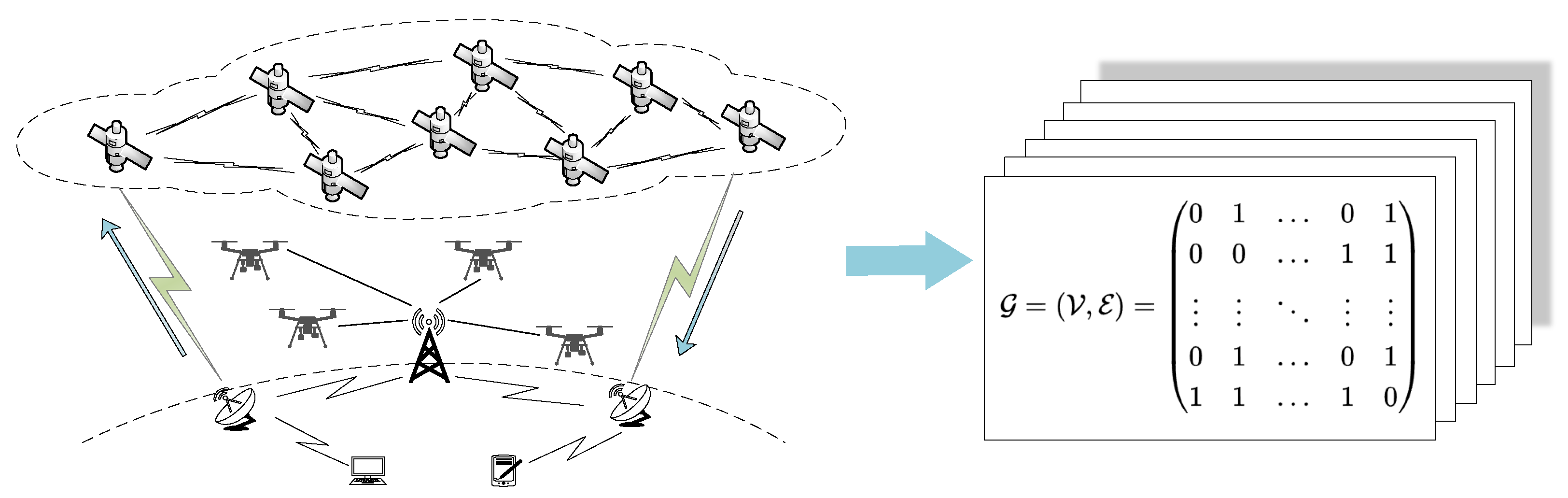
The topological relations of the satellite–UAV-integrated networks can be represented by the geometric representation
in graph theory. Where
denotes the topological model, and
denotes the set of nodes in the topological model with size
.
denotes the set of edges in the topological model with size
. The unique
can be determined by combining
and
.
records the information of all nodes and all edges, which is unique and irreducible. The process of abstracting a time-varying dynamic satellite network into a graph structure is shown in
Figure 2.
The delay in satellite–UAV-integrated networks mainly comes from four sources: uplink delay, downlink delay, transmission delay between satellites, and internal calculations and processing delays. Now, suppose there is a satellite–UAV-integrated network with
N satellites and drones. A routing path
is made up by an order of
M nodes
, and the internal processing delay of node
is
. Then, the total delay for routing path
in the time slice
s is
For simplicity, the distance between node pairs replaces the transmission delay between nodes.
is the transmission delay between node
and
in time slice
s, assuming that the internal delay
of all satellites in the network is almost the same and is
. Further, considering that the delay is the same for uplink
and downlink
for routing path
with the same start and end points, the equation can be simplified as follows:
For old satellites, their computing power is usually low, resulting in the internal delay being far greater than the transmission delay of the signal. This means
, so the model can be simplified as
The delay only depends on the number of nodes on the routing path . For this condition, an unweighted constellation model with an edge matrix can be set for further calculation. In a time slice, if node and are mutually visible, and if invisible.
The weight constellations model is suitable for more advanced satellites and drones, which have higher computational power, resulting in a significant reduction in single satellite computation and processing latency. The final effect presented can be approximated as
, so the model can be simplified as
The delay only depends on the total length of the path. For this condition, a weighted graph with an edge matrix can be set for further calculation. In a time slice, is the latency or distance between and if they are mutually visible, and if invisible.
3.3. Simulated Annealing
A simulated annealing (SA) algorithm is a heuristic algorithm used to solve various complex optimization problems [
27]. It takes inspiration from the cooling process in metal forging. The algorithm starts from an initial solution and generates new candidate solutions by making small random changes to the current solution. It introduces the concept of temperature
T, which controls the probability of accepting new candidate solutions. The probability of accepting a new neighborhood solution is shown as follows:
where
is the objective function of the current solution and
is that of the new neighborhood solution.
T is the current temperature and
k is an arbitrarily set constant.
A simulated annealing algorithm has a wide range of applications and is capable of handling complex optimization problems with large search spaces and nonlinear objective functions. It has been successfully applied to various real-world problems, including the traveling salesman problem [
28], vehicle routing problem [
29], scheduling problem [
30], and parameter optimization in machine learning [
31].
3.4. Graph Partitioning
Graph partitioning (GP) provides a method for the recursive or parallel processing of graph-structured data, reducing the size of the data while ensuring that the partitioning has minimal impact. This has great significance for many distributed systems. In recent years, with the development of networks and IoT systems, graph partitioning has been playing a role in many fields [
32].
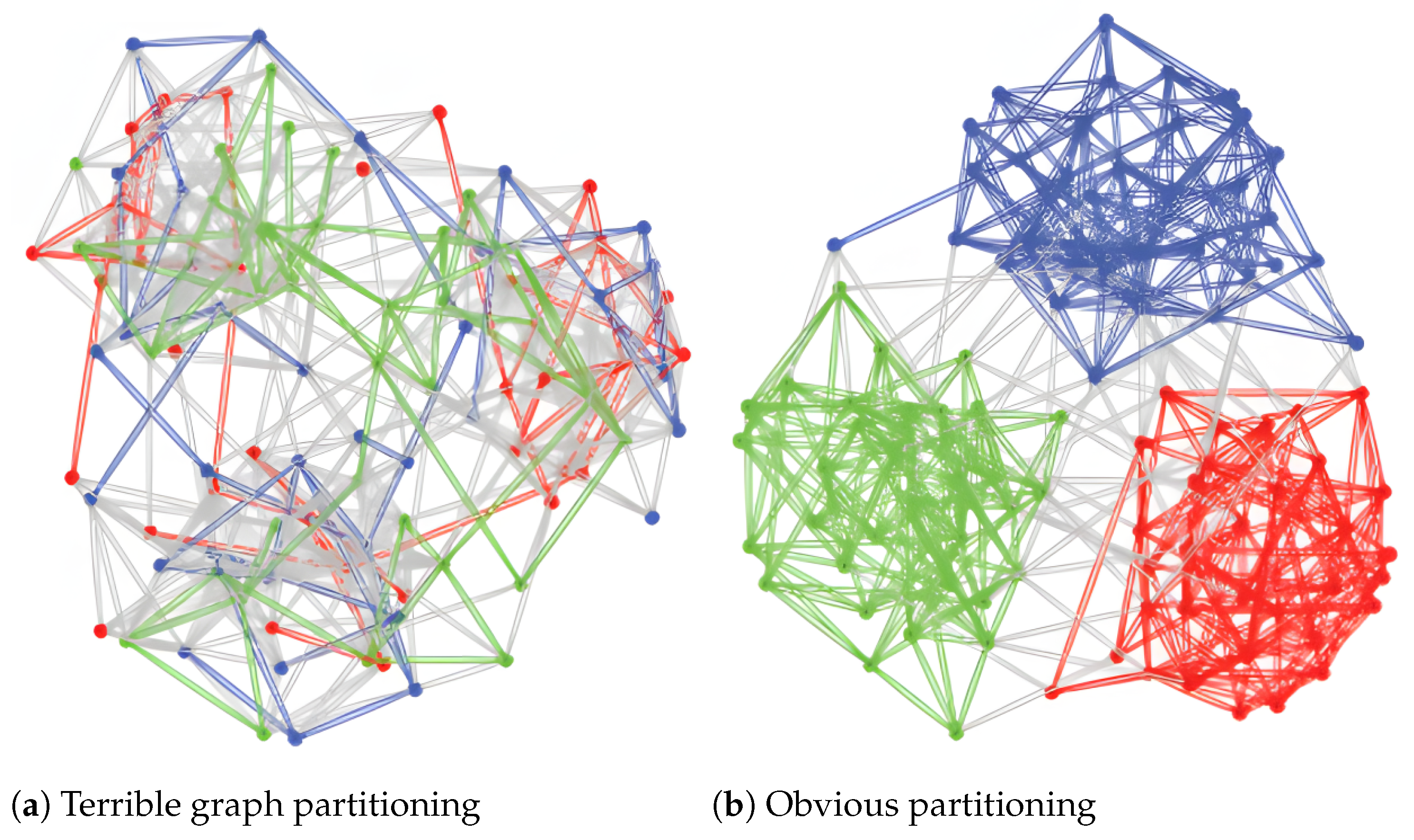
The goal of graph partitioning is divided into edge-cut and vertex-cut, which means that the vertexes or edges in a graph are divided into several balanced sets so that the edges or points between different sets are minimized. The graph partitioning mentioned in this thesis refers specifically to edge-cut, in which all vertices in a graph are divided into k disjoint subsets. An illustration of edge-cut graph partitioning is shown in
Figure 4. The different colors of a node indicate which partition it belongs to. Gray edges indicate edges in different partitions and colored edges indicate edges in the same partition. Since nodes are randomly assigned to different partitions, there are many interpartition edges. When no graph partitioning is performed,
Figure 4a shows a very terrible partition. After graph partitioning,
Figure 4b shows that nodes are assigned to highly clustered partitions.
We now describe the model in mathematical language. Suppose there is an input undirected graph with
vertexes represented by an
adjacency matrix
composed of 0 and 1 to indicate connectivity and a given constant
indicating the number of segmentations to find a color vector
C of length
, which meets the following requirements:
where tolerance is the maximum acceptable difference between two different sets. Under the conditions above,
Graph partitioning is a classic NP-complete problem, so it is usually difficult to find the optimal solution in a finite time. The current graph partitioning methods mainly include spectral methods, geometric methods, and heuristic methods. Considering the research problem in this thesis, that is, the number of nodes in satellite–UAV-integrated networks is far fewer than that in large-scale networks, it is a good heuristic solution to use the simulated annealing described above.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}