
A Distributed Collaborative Allocation Method of Reconnaissance and Strike Tasks for Heterogeneous UAVs


Abstract
:1. Introduction
- The priority of tasks is evaluated by the swarm’s capability superiority over the tasks to reduce the search space. The capability superiority is represented by the spatial density and the capability availability of the tasks, and the attention mechanism is combined to suppress the distant tasks to evaluate the task priority;
- The time coordination mechanism and deterrent maneuver strategy is used to reduce the risk of reconnaissance missions. Due to the incomplete information of the task, multiple UAVs are used to reconnaissance the dense tasks synchronously, and the UAVs with strike capabilities are deployed with deterrent maneuver strategy to reduce the risk of reconnaissance missions;
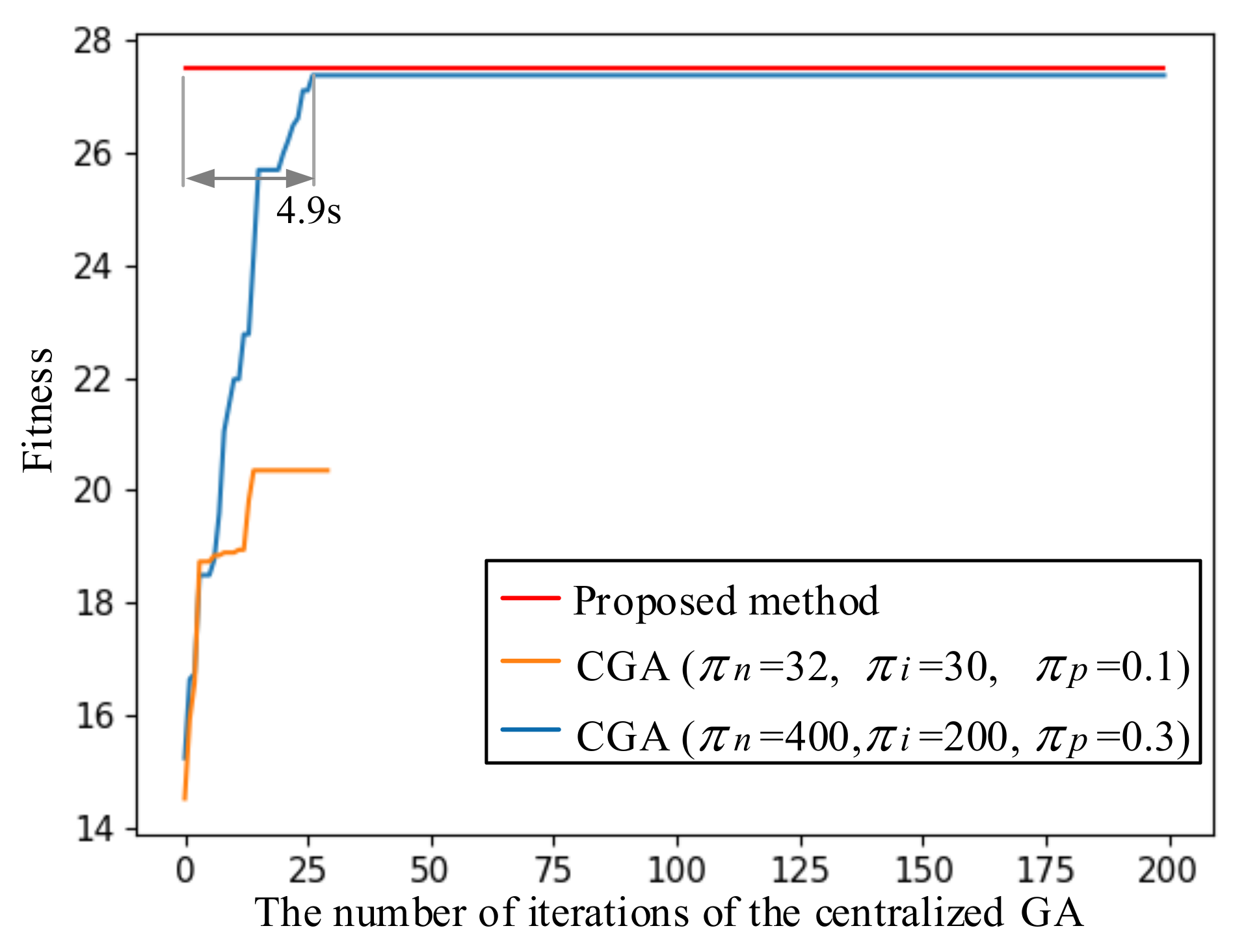
- A distributed task-assignment negotiation mechanism is designed so that UAVs can run in a completely distributed manner. Compared with the centralized GA, the proposed method can reduce the problem search space, improve the optimization speed and the quality of the solution, and the distributed framework can also improve the scalability and reliability of the swarm.
2. Problem Description
3. The Proposed Method
3.1. Negotiate for Scout Task Assignment
3.1.1. Heuristic Rules
- Give priority to the tasks that are isolated and in weak areas of the enemy;
- Give priority to the tasks where our strike capability is dominant;
- Give priority to nearby tasks.
3.1.2. Collaborative Optimization of Reconnaissance Tasks Assignment
- (1)
- Time-collaborative optimization of plan
| Algorithm 1 Fast time-collaborative optimization |
|
- (2)
- Optimization of task-assignment plan
| Algorithm 2 Scout plan optimization within UAV |
|
- (3)
- Negotiation-based conflict resolution
| Algorithm 3 Scout plan conflict-resolving within UAV |
|
3.2. Optimization of Strike Task Allocation
| Algorithm 4 Strike plan Optimization within UAV |
|
3.3. Deterrence Maneuver Optimization
| Algorithm 5 Deterrence maneuver optimization within UAV |
|
4. Experiment and Result Analysis
4.1. Experiment Settings
4.2. Scene Generation
4.3. Reconnaissance Task Priority Assessment Results
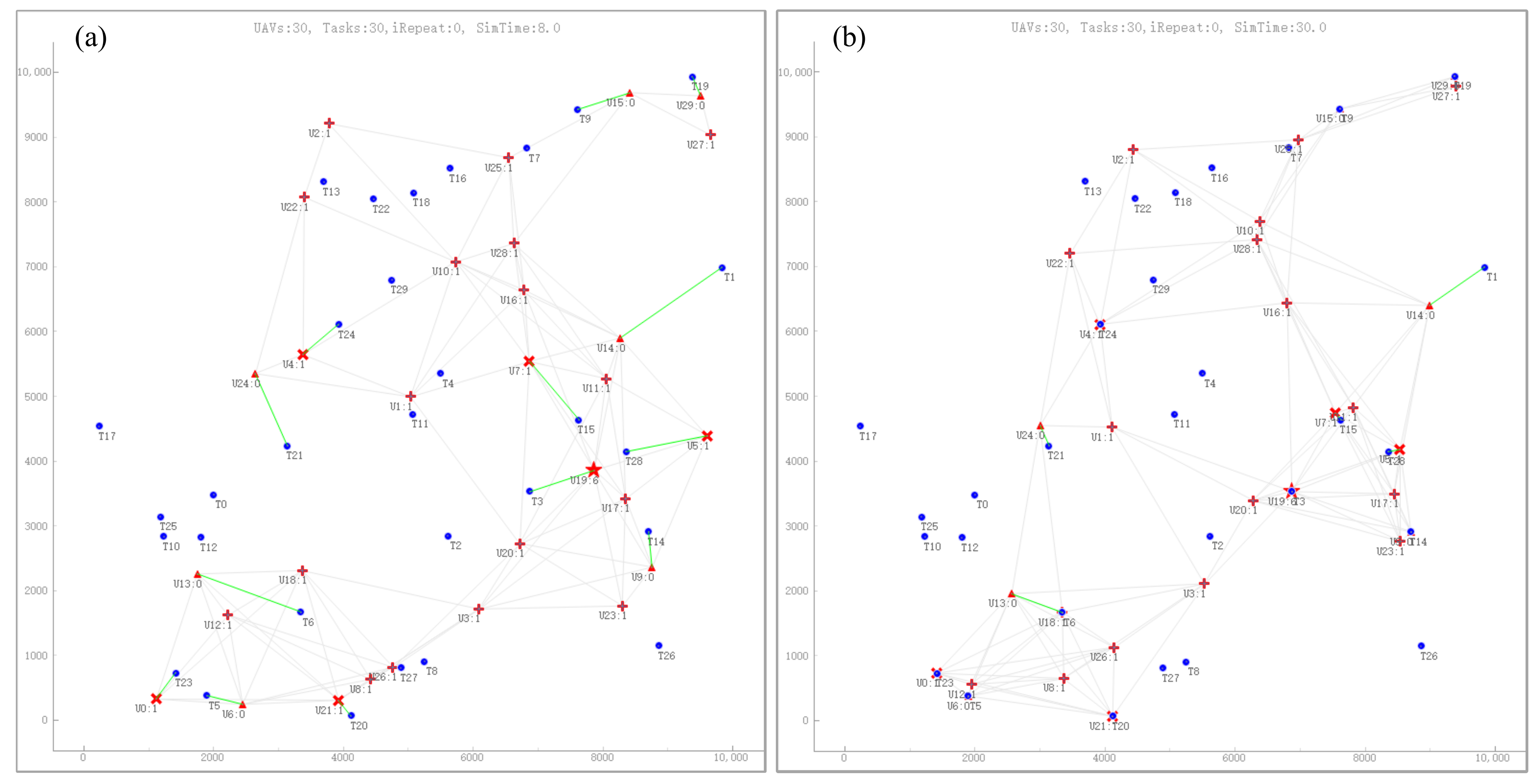
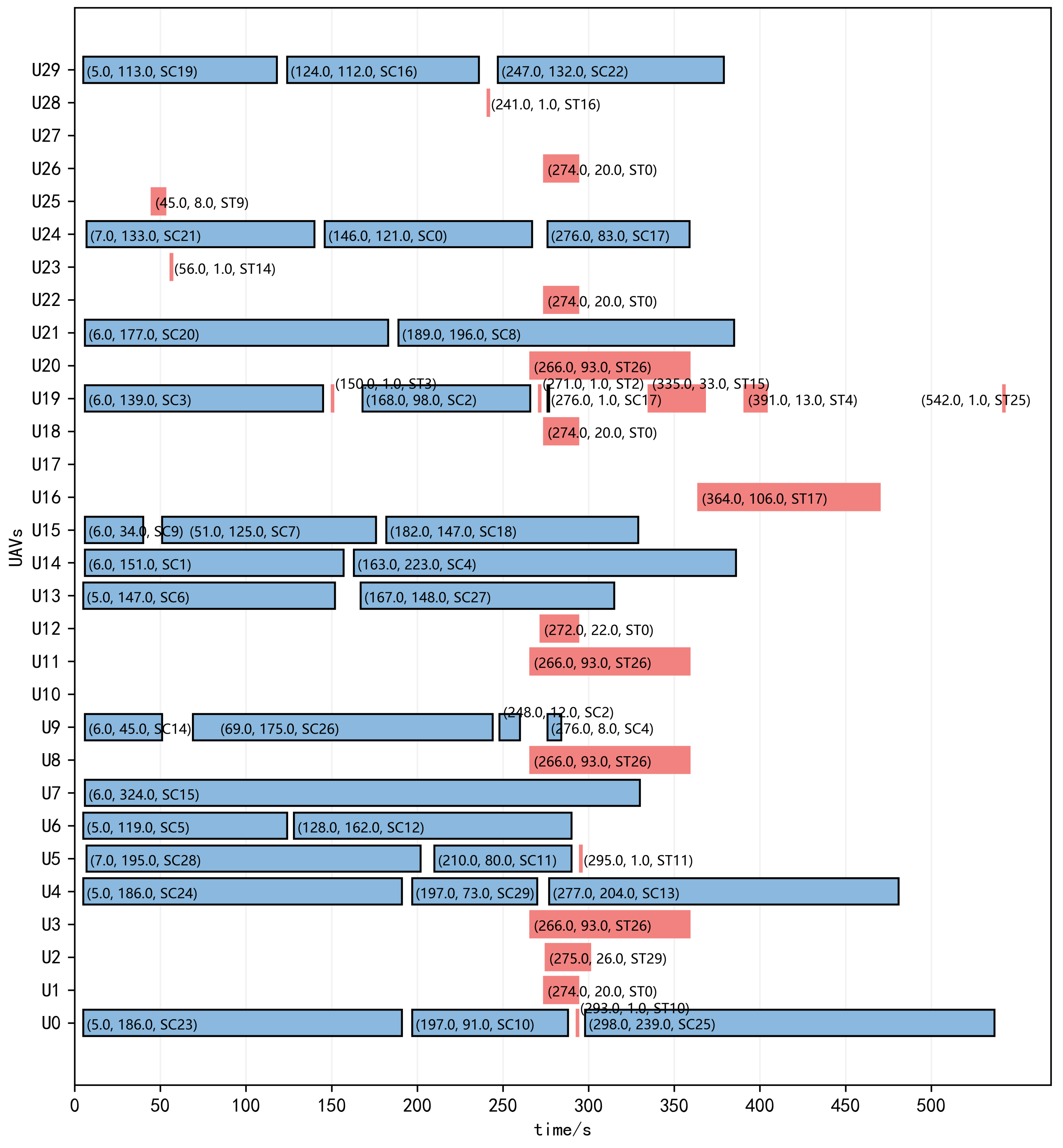
4.4. Reconnaissance Task Assignment
4.5. Comparison with Centralized Global Optimization Based on GA
4.6. Comparison with No Time Coordination and Deterrence Maneuver
4.7. Discussion
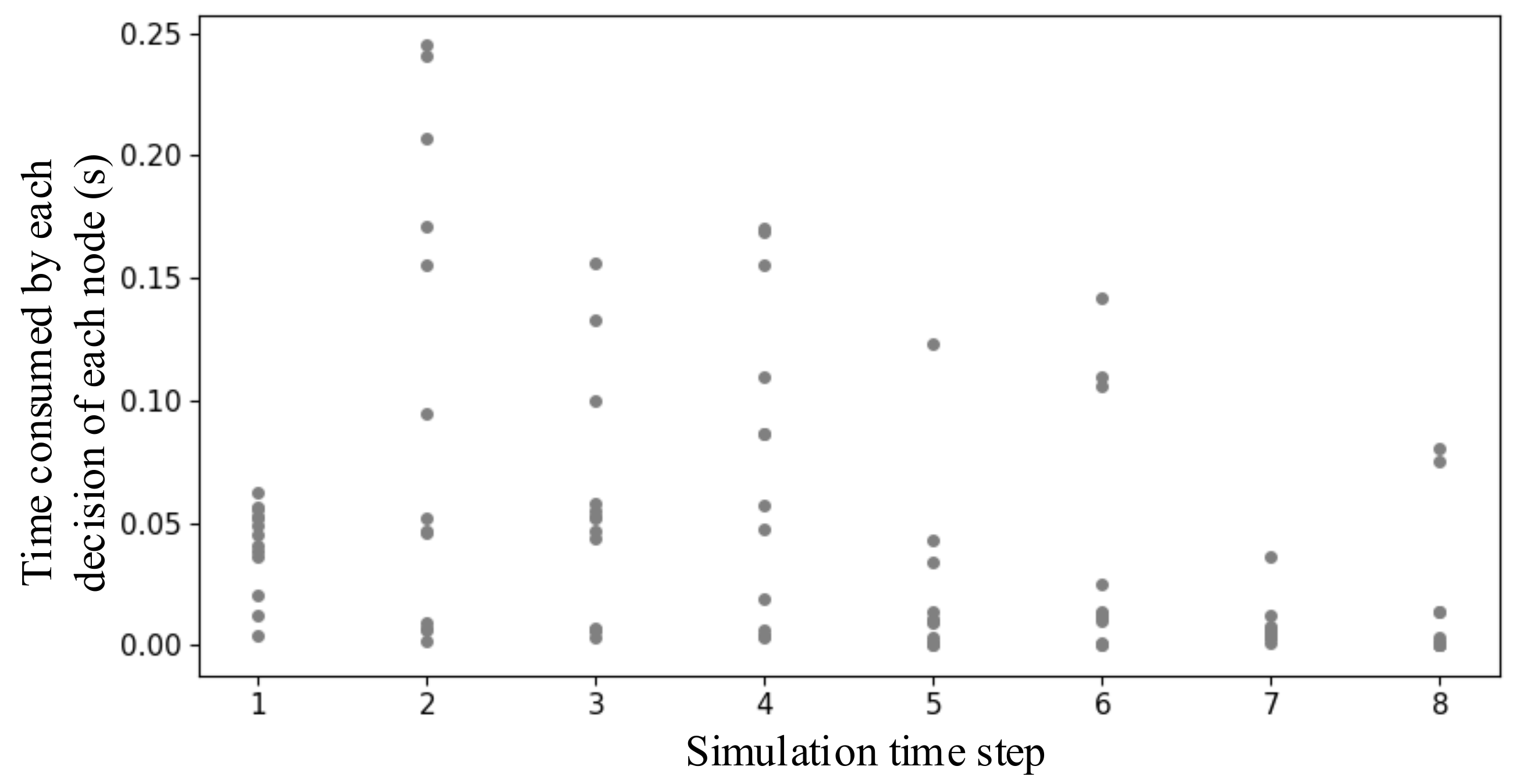
4.7.1. Computational Complexity Analysis
4.7.2. Method Characteristics under Different Network Connectivity
4.7.3. Influence of Network Instability on the Proposed Method
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Qin, B.; Zhang, D.; Tang, S.; Wang, M. Distributed Grouping Cooperative Dynamic Task Assignment Method of UAV Swarm. Appl. Sci. 2022, 12, 2865. [Google Scholar] [CrossRef]
- Zhang, J.; Xing, J. Cooperative task assignment of multi-UAV system. Chin. J. Aeronaut. 2020, 33, 2825–2827. [Google Scholar] [CrossRef]
- Jiang, X.; Zeng, X.; Sun, J.; Chen, J. Research status and prospect of distributed optimization for multiple aircraft. Acta Astronaut. 2021, 42, 524551. (In Chinese) [Google Scholar] [CrossRef]
- Zhen, Z.; Xing, D.; Gao, C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerosp. Sci. Technol. 2018, 76, 402–411. [Google Scholar] [CrossRef]
- Duan, H.; Zhao, J.; Deng, Y.; Shi, Y.; Ding, X. Dynamic Discrete Pigeon-Inspired Optimization for Multi-UAV Cooperative Search-Attack Mission Planning. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 706–720. [Google Scholar] [CrossRef]
- Ma, Y.; Zhao, Y.; Bai, S.; Yang, J.; Zhang, Y. Collaborative task allocation of heterogeneous multi-UAV based on improved CBGA algorithm. In Proceedings of the 16th International Conference on Control, Automation, Robotics and Vision, Shenzhen, China, 13–15 December 2020; pp. 795–800. [Google Scholar]
- Dai, W.; Lu, H.; Xiao, J.; Zeng, Z.; Zheng, Z. Multi-Robot Dynamic Task Allocation for Exploration and Destruction. J. Intell. Robot. Syst. 2019, 98, 455–479. [Google Scholar] [CrossRef]
- Sheng, W.; Yang, Q.; Tan, J.; Xi, N. Distributed multi-robot coordination in area exploration. Robot. Auton. Syst. 2006, 54, 945–955. [Google Scholar] [CrossRef]
- Ye, F.; Chen, J.; Sun, Q.; Tian, Y.; Jiang, T. Decentralized task allocation for heterogeneous multi-UAV system with task coupling constraints. J. Supercomput. 2020, 77, 111–132. [Google Scholar] [CrossRef]
- Chen, J.; Wu, Q.; Xu, Y.; Qi, N.; Guan, X.; Zhang, Y.; Xue, Z. Joint Task Assignment and Spectrum Allocation in Heterogeneous UAV Communication Networks: A Coalition Formation Game-Theoretic Approach. IEEE Trans. Wirel. Commun. 2021, 20, 440–452. [Google Scholar] [CrossRef]
- Jiang, Y. A Survey of Task Allocation and Load Balancing in Distributed Systems. IEEE Trans. Parallel Distrib. Syst. 2016, 27, 585–599. [Google Scholar] [CrossRef]
- Li, L.; Xu, S.; Nie, H.; Mao, Y.; Yu, S. Collaborative Target Search Algorithm for UAV Based on Chaotic Disturbance Pigeon-Inspired Optimization. Appl. Sci. 2021, 11, 7358. [Google Scholar] [CrossRef]
- Hu, J.; Wu, H.; Zhan, R.; Menassel, R.; Zhou, X. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior. J. Syst. Eng. Electron. 2021, 32, 1463–1476. [Google Scholar]
- Choi, H.; Brunet, L.; How, J.P. Consensus-Based Decentralized Auctions for Robust Task Allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef] [Green Version]
- Edalat, N.; Tham, C.; Xiao, W. An auction-based strategy for distributed task allocation in wireless sensor networks. Comput. Commun. 2012, 35, 916–928. [Google Scholar] [CrossRef]
- Choi, H.; Kim, Y.; Kim, H.J. Genetic algorithm based decentralized task assignment for multiple unmanned aerial vehicles in dynamic environments. Int. J. Aeronaut. Space Sci. 2011, 163–174. [Google Scholar] [CrossRef] [Green Version]
- Patel, R.; Rudnick-Cohen, E.; Azarm, S.; Otte, M.; Xu, H.; Herrmann, J.W. Decentralized Task Allocation in Multi-Agent Systems Using a Decentralized Genetic Algorithm. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3770–3776. [Google Scholar]
- Wu, H.; Li, H.; Xiao, R.; Liu, J. Modeling and simulation of dynamic ant colony’s labor division for task allocation of UAV swarm. Physica A 2018, 491, 127–141. [Google Scholar] [CrossRef]
- Cao, Y.; Wei, W.; Bai, Y.; Qiao, H. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm. Clust. Comput. 2019, 22, 5175–5184. [Google Scholar] [CrossRef]
- Yu, W.; Ai, T.; Shao, S. The analysis and delimitation of Central Business District using network kernel density estimation. J. Transp. Geogr. 2015, 45, 32–47. [Google Scholar] [CrossRef]
- Khan, M.A.; Safi, A.; Qureshi, I.M.; Khan, I.U. Flying ad-hoc networks (FANETs): A review of communication architectures, and routing protocols. In Proceedings of the 2017 First International Conference on Latest trends in Electrical Engineering and Computing Technologies, Karachi, Pakistan, 15–16 November 2017; pp. 1–9. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Payload Type | Scout Speed | Penetration Ability | Damage Ability | Reusable |
|---|---|---|---|---|
| Scout payload | 50 | 0 | 0 | Y |
| Strike payload 1 | 0 | 40 | 60 | N |
| Strike payload 2 | 0 | 80 | 40 | N |
| UAV Type | Velocity (m/s) | Scout Speed () | Number of Strike Loads | Capability Vector of Strike Loads |
|---|---|---|---|---|
| Mini scouter | 40 | 10,000 | 0 | — |
| Mini striker | 50 | — | 1 | [40, 40] |
| Mini SC&ST | 50 | 6000 | 1 | [80, 80] |
| Medium SC&ST | 80 | 15,000 | 6 | [100, 100] |
| Task Type | Area Size () | Required Capability Vector |
|---|---|---|
| Fake target | — | |
| Target type1 | [25, 30] | |
| Target type2 | [100, 80] | |
| Target type3 | [40, 150] | |
| Target type4 | [200, 200] |
| Task Type | Tasks |
|---|---|
| Fake target | T1, T5, T6, T7, T8, T12, T13, T18, T19, T20, T21, T22, T23, T24, T27, T28 |
| Target type1 | T9, T10, T11, T14, T16, T17, T29 |
| Target type2 | T3, T4, T15, T25 |
| Target type3 | T0, T26 |
| Target type4 | T2 |
| Evaluator | Task Prior Order to Each UAV | Evaluator | Task Prior Order to Each UAV |
|---|---|---|---|
| U0 | U0: (5, 23, 6, 20, 12, 10, 25, …) U6: (5, 23, 6, 20, 12, 10, 25, …) U13: (23, 5, 6, 12, 10, 25, 20, …) U21: (5, 6, 23, 20, 12, 27, 10, …) | U14 | U14: (15, 28, 3, 1, 14, 4, 7, …) U5: (28, 15, 14, 3, 1, 4, 11, …) U7: (15, 28, 3, 4, 14, 1, 11, …) U9: (28, 15, 14, 3, 4, 1, 11, …) U15: (1, 7, 15, 28, 9, 4, 3, …) U19: (28, 15, 3, 14, 4, 1, 11, …) |
| U4 | U4: (24, 21, 29, 11, 4, 0, 13, …) U7: (4, 11, 29, 24, 21, 22, 13, …) U24: (24, 21, 29, 11, 4, 0, 13, …) | U15 | U15: (9, 19, 7, 16, 1, 18, 22, …) U7: (7, 9, 16, 19, 1, 18, 15, …) U14: (7, 9, 1, 19, 16, 18, 15, …) U29: (19, 9, 7, 1, 16, 18, 22, …) |
| U5 | U5: (28, 14, 15, 3, 1, 26, 4, …) U7: (15, 28, 14, 3, 1, 4, 26, …) U9: (14, 28, 15, 3, 26, 1, 2, …) U14: (28, 15, 14, 3, 1, 26, 4, …) U19: (28, 14, 15, 3, 1, 26, 4, …) | U19 | U19: (14, 28, 15, 3, 2, 26, 4, …) U5: (28, 14, 15, 3, 26, 2, 4, …) U7: (15, 3, 28, 14, 4, 11, 2, …) U9: (14, 28, 3, 15, 26, 2, 4, …) U14: (15, 28, 3, 14, 4, 2, 11, …) |
| U6 | U6: (6, 20, 5, 23, 27, 8, 12, …) U0: (5, 23, 6, 20, 27, 12, 10, …) U13: (6, 23, 5, 20, 12, 27, 10, …) U21: (6, 20, 5, 27, 23, 8, 12, …) | U21 | U21: (6, 20, 27, 8, 5, 23, 2, …) U0: (5, 23, 6, 20, 27, 8, 12, …) U6: (6, 20, 5, 27, 23, 8, 12, …) U9: (8, 27, 2, 20, 6, 3, 5, …) U13: (6, 5, 23, 20, 27, 8, 12, …) |
| U7 | U7: (15, 28, 3, 4, 11, 29, 24, …) U4: (4, 11, 29, 24, 3, 15, 28, …) U5: (28, 15, 3, 14, 4, 11, 1, …) U9: (28, 3, 15, 14, 4, 11, 2, …) U14: (15, 28, 3, 4, 11, 29, 14, …) U15: (7, 15, 28, 16, 4, 29, 9, …) U19: (15, 28, 3, 4, 14, 11, 2, …) U24: (4, 11, 24, 29, 3, 15, 28, …) | U9 | U9: (14, 28, 26, 3, 15, 2, 8, …) U5: (14, 28, 15, 3, 26, 2, 8, …) U7: (28, 15, 3, 14, 26, 2, 4, …) U14: (28, 15, 14, 3, 26, 2, 4, …) U19: (14, 28, 3, 15, 26, 2, 8, …) U21: (3, 14, 26, 2, 28, 8, 15, …) |
| U24 | U24: (21, 24, 0, 29, 11, 4, 12, …) U4: (24, 21, 11, 29, 0, 4, 13, …) U7: (24, 4, 11, 29, 21, 13, 22, …) | U29 | U29: (19, 9, 1, 7, 16, 18, 15, …) U15: (19, 9, 7, 1, 16, 18, 15, …) |
| U13 | U13: (6, 23, 5, 12, 0, 10, 25, …) U0: (23, 5, 6, 12, 10, 25, 0, …) U6: (6, 5, 23, 12, 20, 10, 0, …) U21: (6, 5, 23, 20, 12, 0, 10, …) | — | — |
| UAV ID | Current Pos | Task ID | Task Pos | Planned | Maximum | Collaborate UAVs | |
|---|---|---|---|---|---|---|---|
| U0 | (1029.8, 204.3) | T23 | (1420.5, 729.8) | 23.38 | 35.63 | 50 | U6 |
| U6 | (2618.0, 202.9) | T5 | (1904.0, 377.2) | 23.38 | 40.00 | 40 | U0 |
| U5 | (9722.0, 4410.0) | T28 | (8364.7, 4143.4) | 34.66 | 50.00 | 50 | U7 |
| U7 | (6776.9, 5650.7) | T15 | (7634.8, 4636.8) | 33.66 | 48.01 | 50 | U5 |
| U4 | (3223.9, 5507.1) | T24 | (3931.8, 6108.0) | 23.57 | 50.00 | 50 | — |
| U9 | (8777.8, 2235.3) | T14 | (8712.1, 2910.3) | 22.95 | 40.00 | 40 | — |
| U13 | (1596.7, 2313.2) | T6 | (3348.8, 1669.4) | 51.66 | 40.00 | 40 | — |
| U14 | (8179.1, 5827.7) | T1 | (9846.0, 6986.1) | 56.75 | 40.00 | 40 | — |
| U15 | (8543.8, 9725.0 ) | T9 | (7617.9, 9429.2) | 30.30 | 40.00 | 40 | — |
| U19 | (8114.8, 3937.6) | T3 | (6881.7, 3528.7) | 22.24 | 80.00 | 80 | — |
| U21 | (3826.9, 436.9) | T20 | (4124.1, 67.6) | 15.48 | 50.00 | 50 | — |
| U24 | (2615.7, 5425.9) | T21 | (3144.3, 4235.8) | 39.56 | 40.00 | 40 | — |
| U29 | (9578.5, 9477.7) | T19 | (9387.9, 9928.5) | 17.24 | 40.00 | 40 | — |
| Deterrence Maneuver Type | Enable Time Collaboration | Disable Time Collaboration | ||
|---|---|---|---|---|
| Scout Risk | Cap. Coverage | Scout Risk | Cap. Coverage | |
| Enable deterrence maneuver | 0.238 ± 0.065 | 153.1 ± 61.3 | 0.311 ± 0.090 | 166.6 ± 63.9 |
| Disable deterrence maneuver | 0.234 ± 0.048 | 131.5 ± 33.7 | 0.311 ± 0.091 | 116.7 ± 31.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, H.; Huang, J.; Liu, Q.; Zhao, T.; Zhou, C.; Gao, J. A Distributed Collaborative Allocation Method of Reconnaissance and Strike Tasks for Heterogeneous UAVs. Drones 2023, 7, 138. https://doi.org/10.3390/drones7020138
Deng H, Huang J, Liu Q, Zhao T, Zhou C, Gao J. A Distributed Collaborative Allocation Method of Reconnaissance and Strike Tasks for Heterogeneous UAVs. Drones. 2023; 7(2):138. https://doi.org/10.3390/drones7020138
Chicago/Turabian StyleDeng, Hanqiang, Jian Huang, Quan Liu, Tuo Zhao, Cong Zhou, and Jialong Gao. 2023. "A Distributed Collaborative Allocation Method of Reconnaissance and Strike Tasks for Heterogeneous UAVs" Drones 7, no. 2: 138. https://doi.org/10.3390/drones7020138