
A Computation Offloading Scheme for UAV-Edge Cloud Computing Environments Considering Energy Consumption Fairness

 , , , , and
, , , , and
Abstract
:1. Introduction
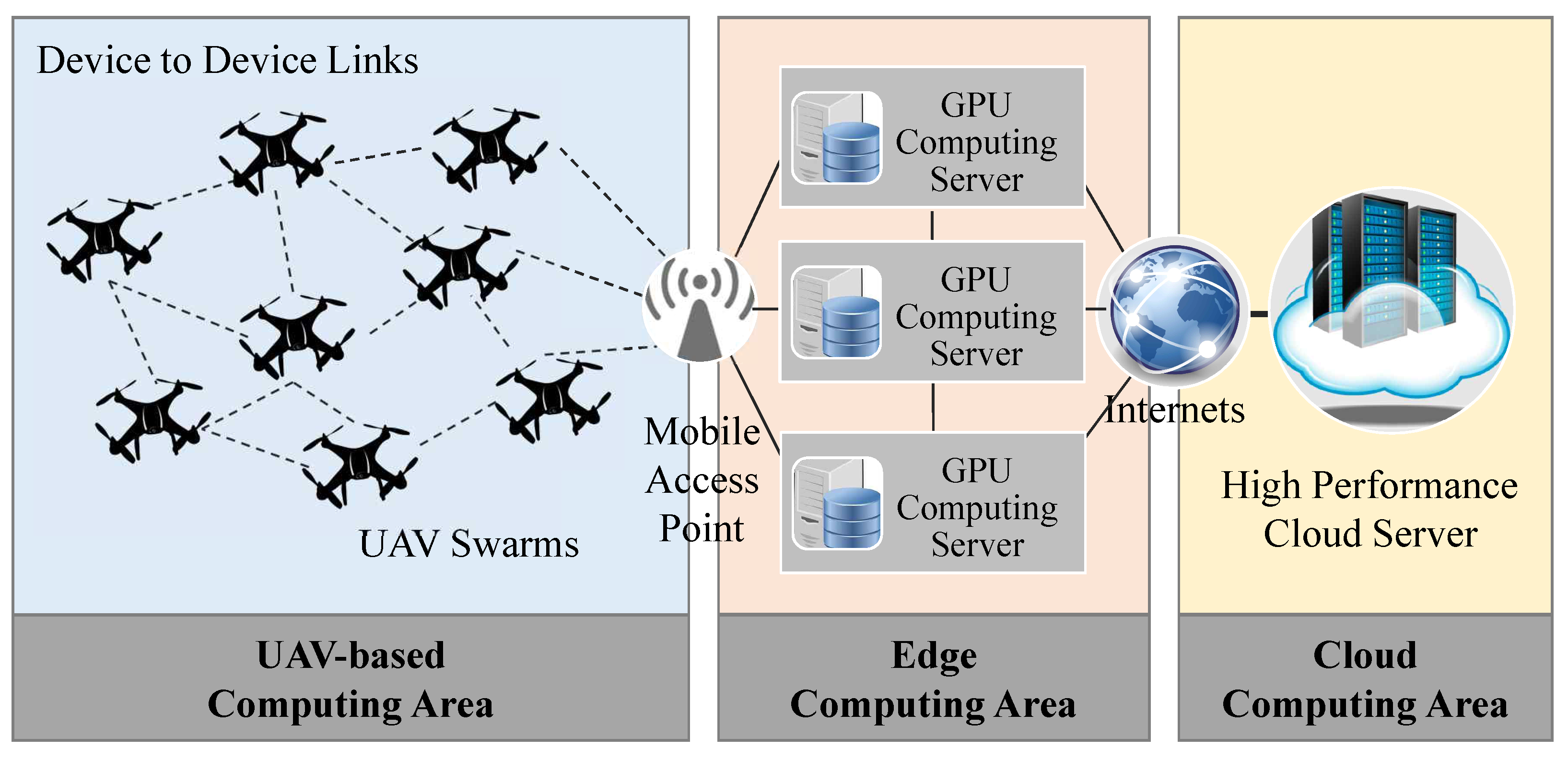
- Our system model had three layers: UAV-based computing area, edge computing area, and cloud computing area. We considered the routing costs among the drones for each offloading task in the UAV-based computing area. We also considered the scheduling costs of requests of multiple users in the edge and the cloud computing areas.
- The energy efficiency is an important issue in drone-based systems, but the energy consumption fairness is also an important issue in order to sustain the network connection among the UAVs. The originality of our GA-based computational offloading and workflow allocation scheme considered the residual energy balance among the UAVs to extend the lifetime of the UAV-based computing area.
- We use a GA-based computational offloading decision scheme to determine a better solution by considering the energy consumption, the energy consumption fairness, and the resource constraints, such as processing power and network bandwidth. Our approach outperformed the previously reported Markov approximation-based schemes in terms of the energy consumption fairness.
2. Related Works
2.1. Offloading Architectures
2.2. Offloading Strategies
2.3. Genetic Algorithm-Based Offloading Schemes
3. Computational Offloading Scheme That Considered Energy Consumption Fairness
3.1. Assumptions and Our System Model
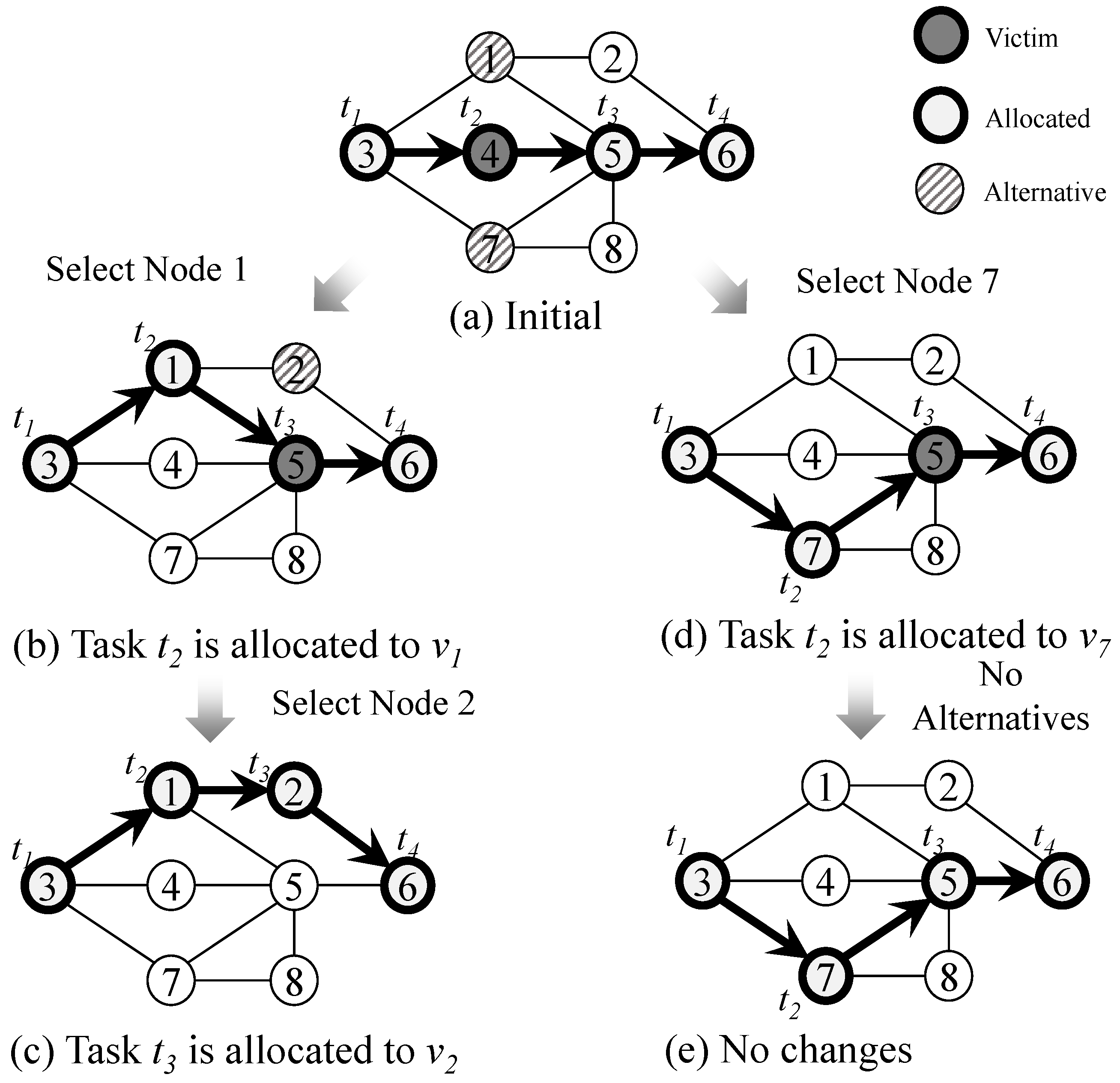
3.2. Proposed Computational Offloading Algorithm
| Algorithm 1: Proposed computational offloading and workflow allocation algorithm while considering energy consumption fairness |
 |
4. Performance Evaluations
4.1. Simulation Environments
4.2. Simulation Results and Discussion
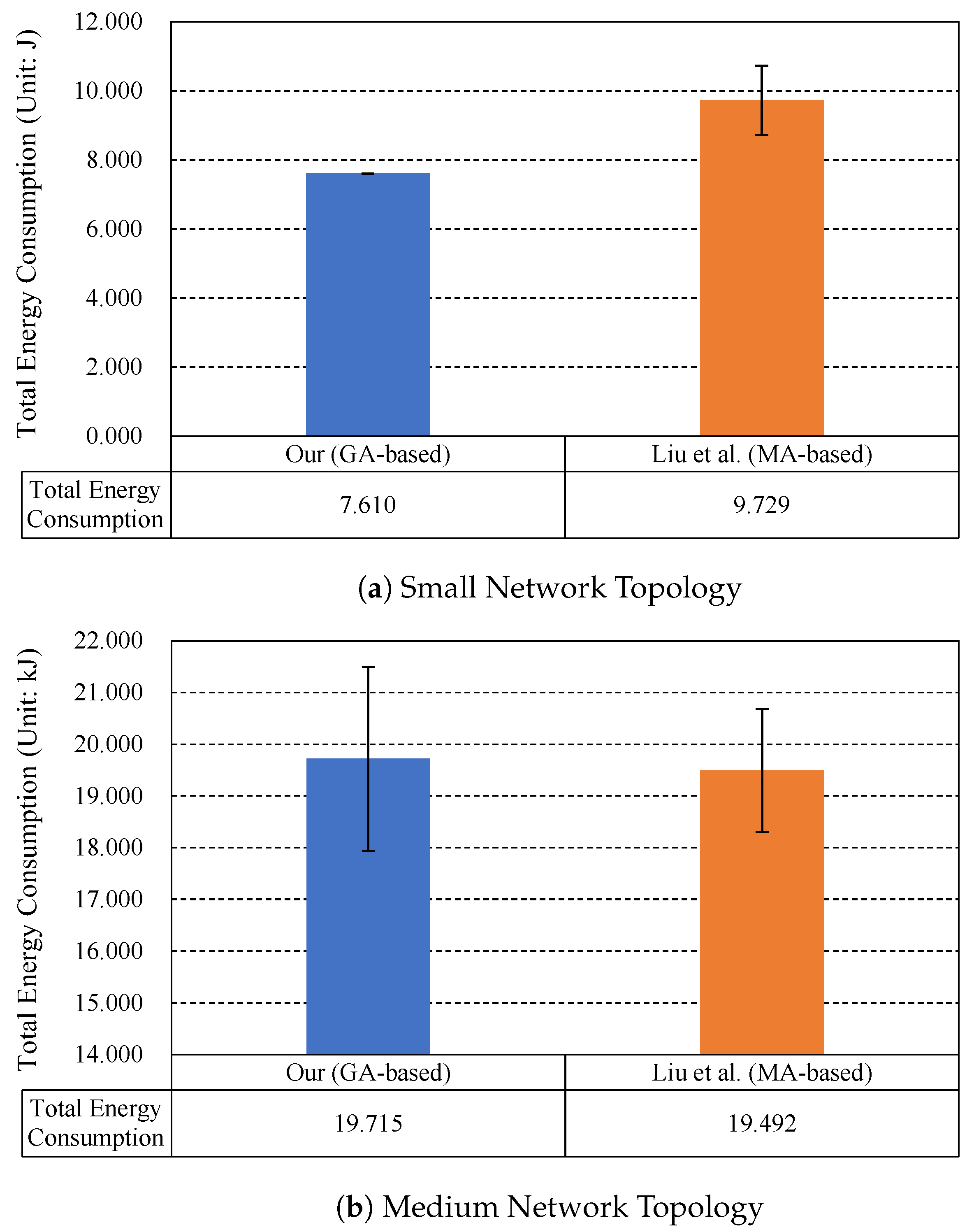
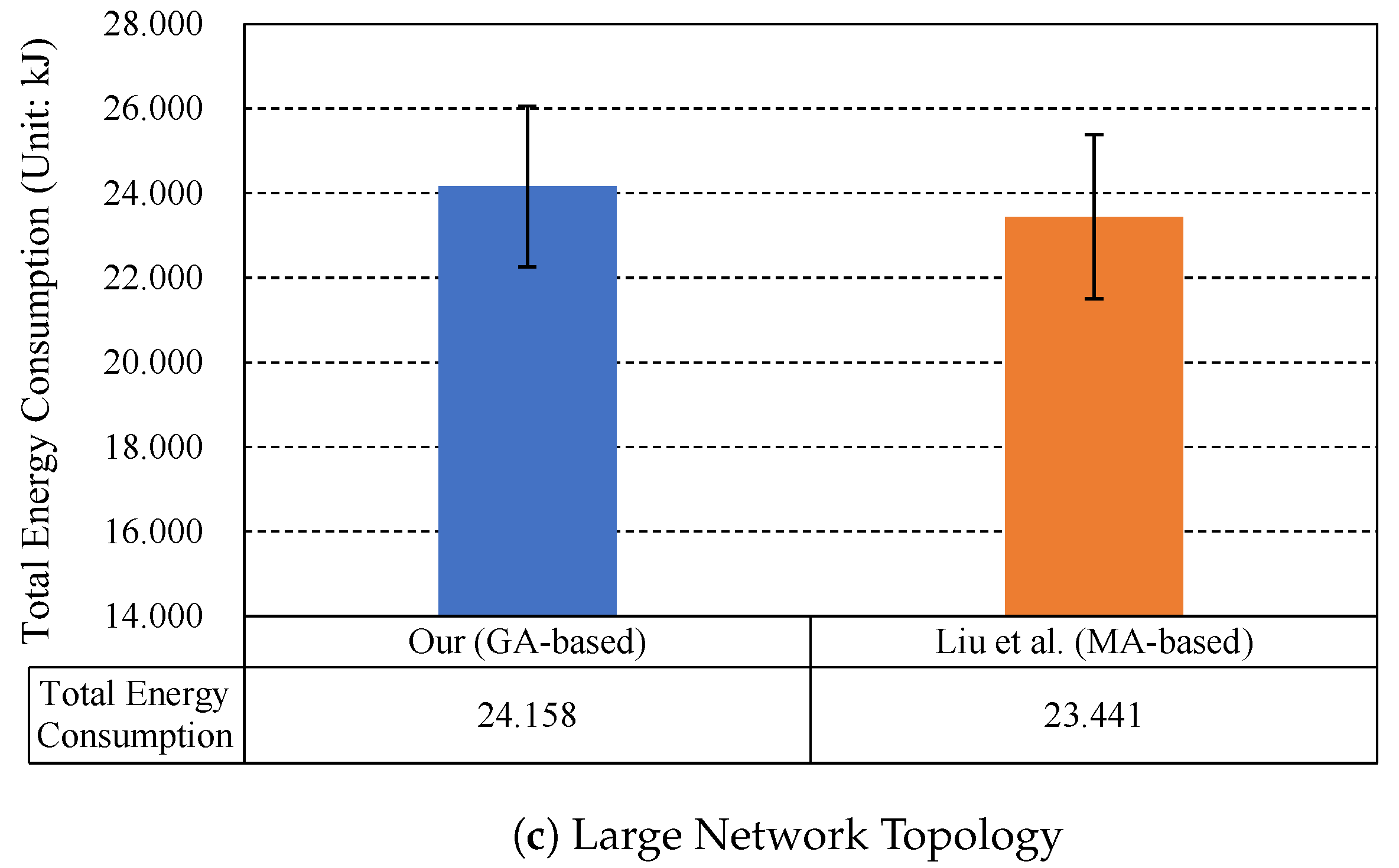
4.2.1. Comparison Results of the Total Energy Consumption
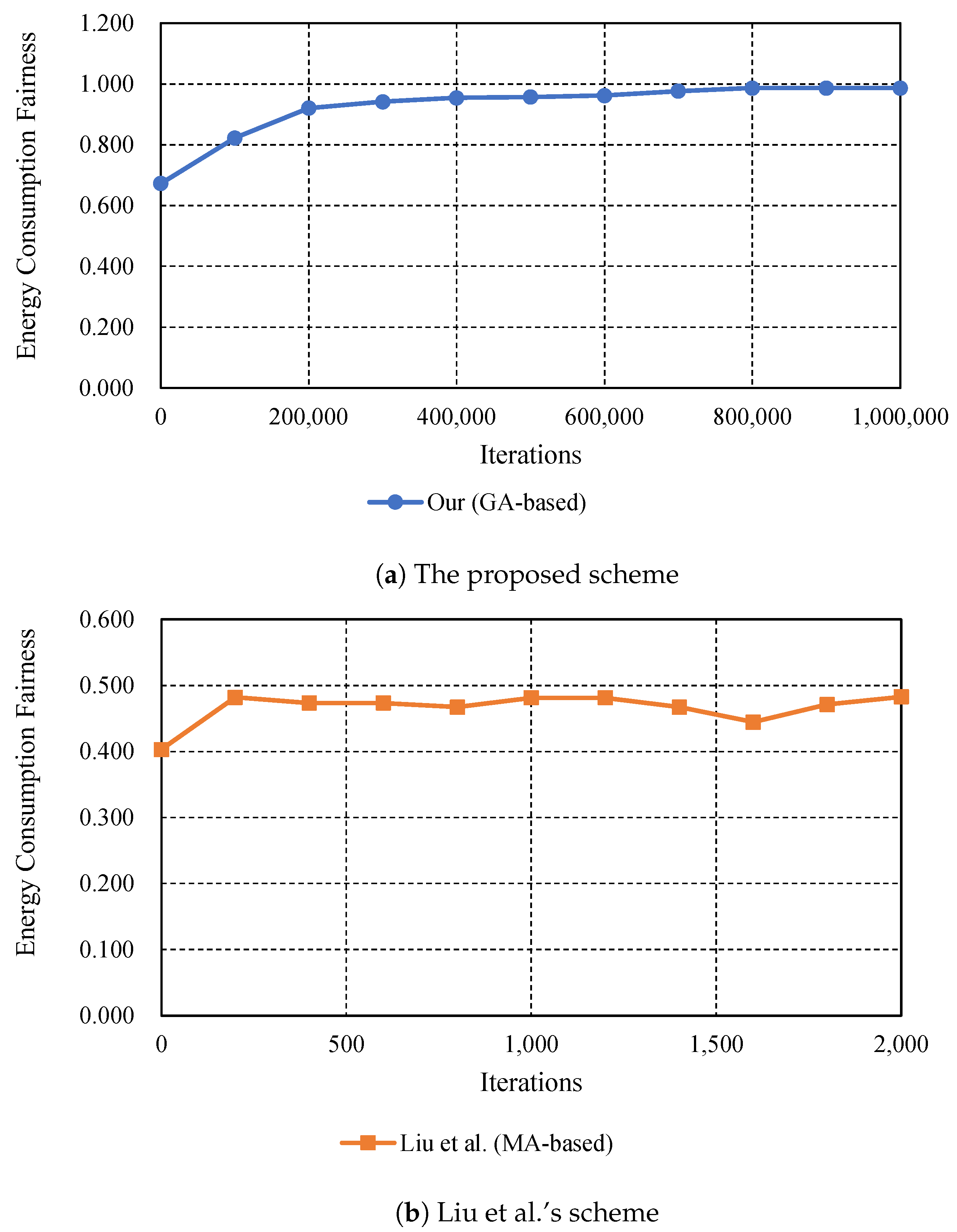
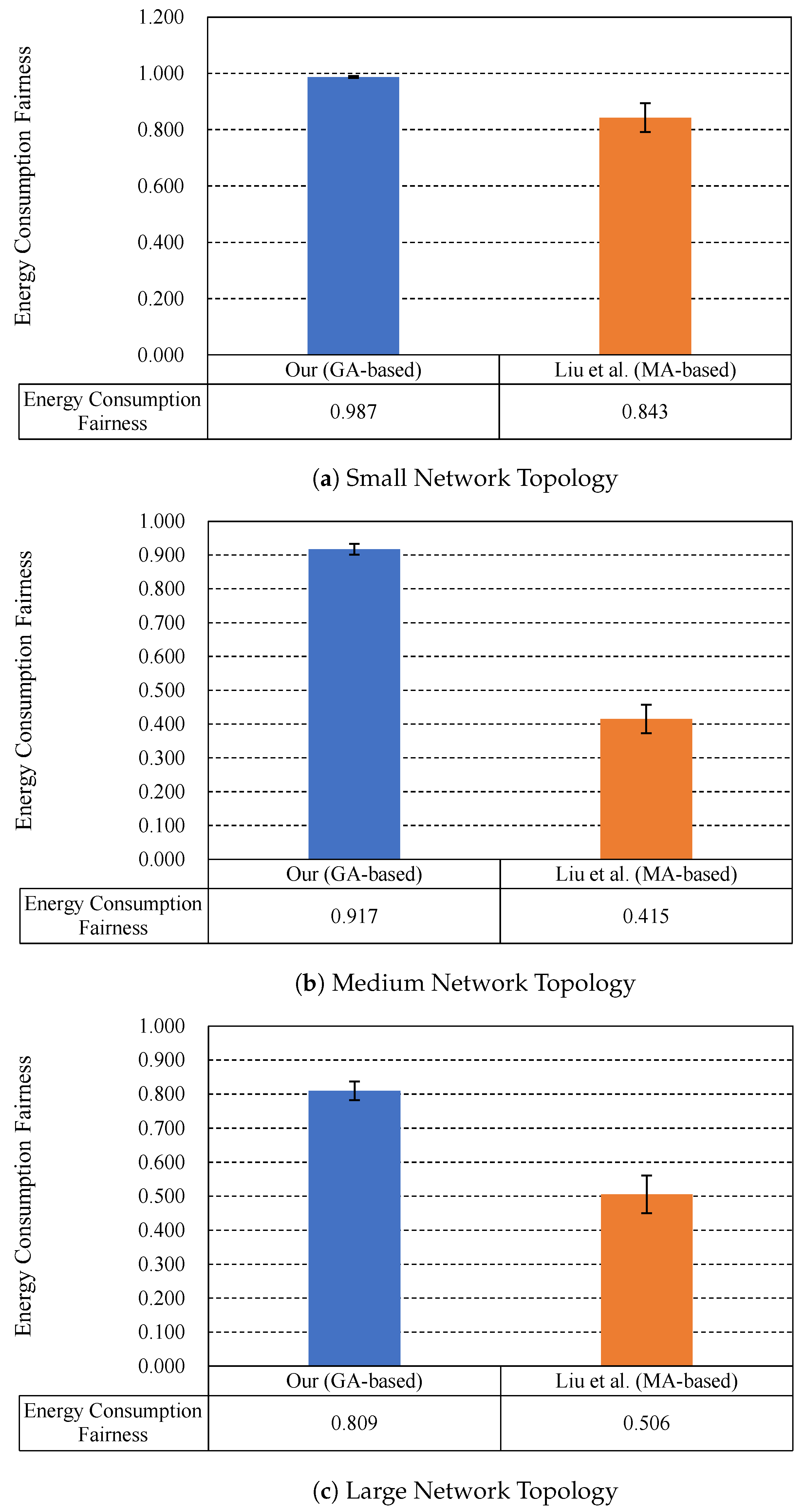
4.2.2. Comparison Results of the Energy Consumption Fairness
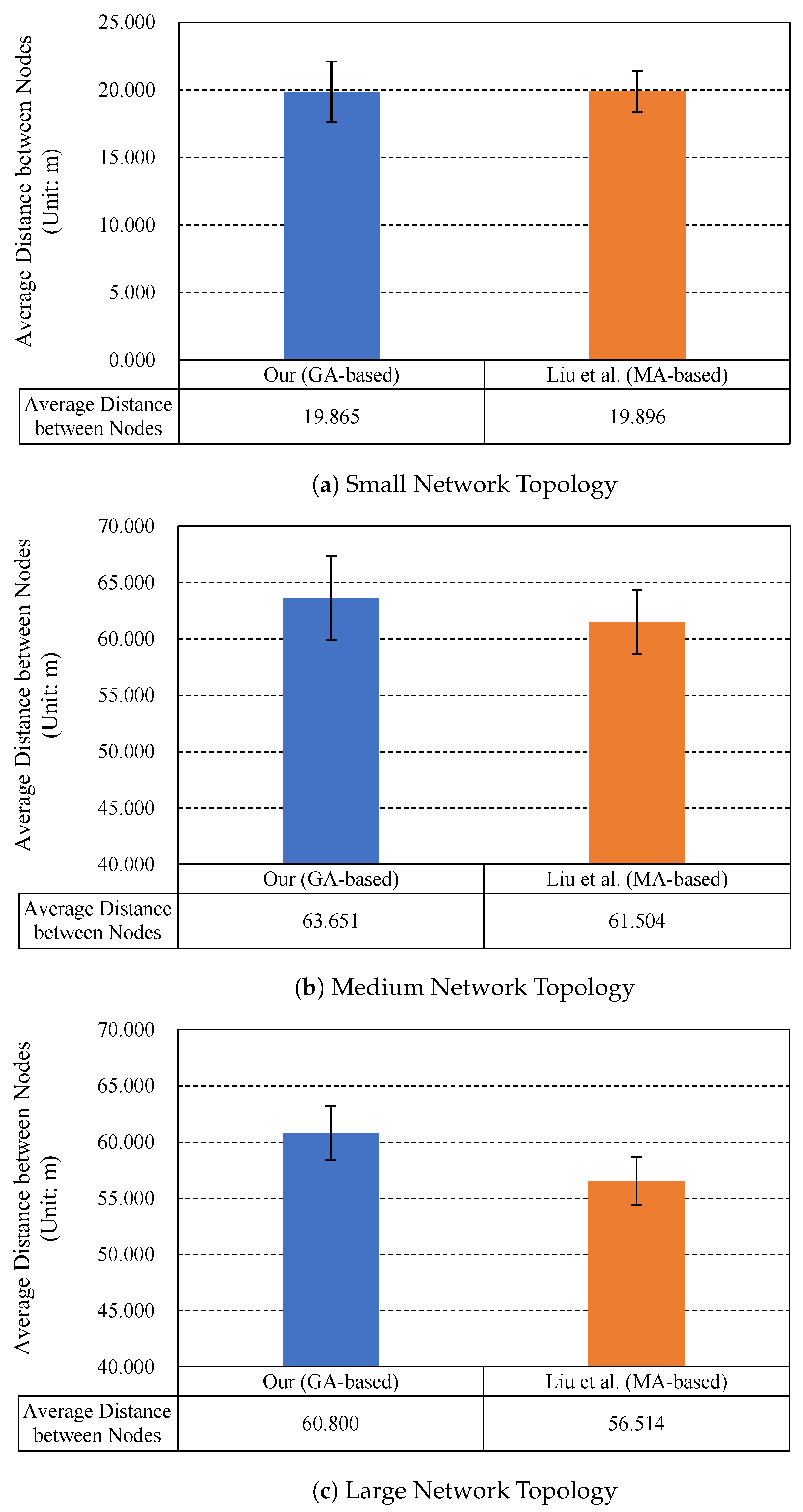
4.2.3. Comparison Results of the Average Distance between the Nodes
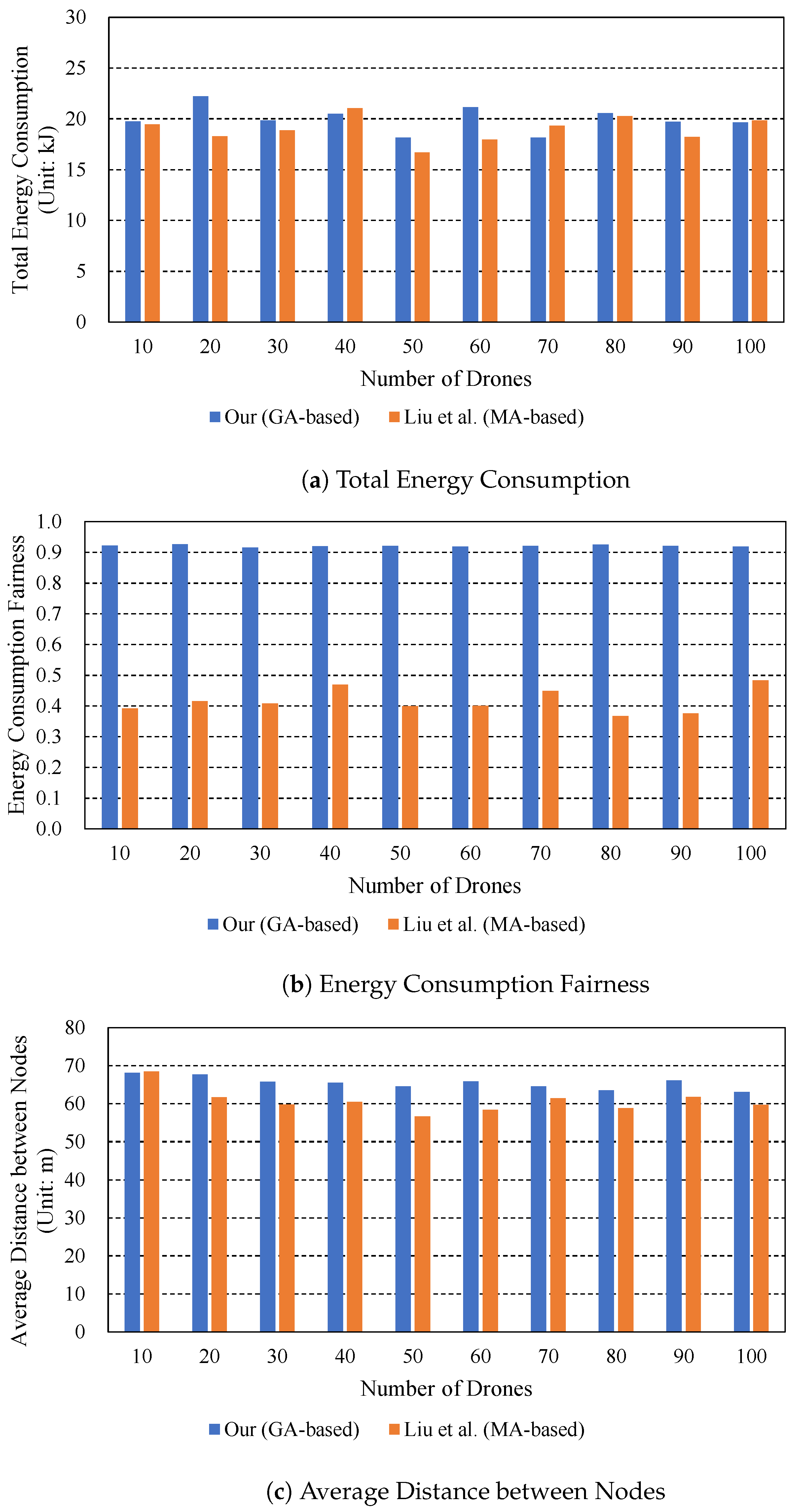
4.2.4. Comparison Results According to the Number of Drones
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Balamuralidhar, N.; Tilon, S.; Nex, F. MultEYE: Monitoring System for Real-Time Vehicle Detection, Tracking and Speed Estimation from UAV Imagery on Edge-Computing Platforms. Remote Sens. 2021, 13, 573. [Google Scholar] [CrossRef]
- Kim, B.; Jung, J.; Min, H.; Heo, J. Energy Efficient and Real-Time Remote Sensing in AI-Powered Drone. Mob. Inf. Syst. 2021, 2021, 6650053. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, W.; Chen, W.; Huang, H.; Guo, S. Online Computation Offloading and Traffic Routing for UAV Swarms in Edge-Cloud Computing. IEEE Trans. Veh. Technol. 2020, 69, 8777–8791. [Google Scholar] [CrossRef]
- Kim, B.; Min, H.; Jang, J.; Jung, J.; Han, J.; Heo, J. Computation Offloading Scheme Considering Energy Consumption Fairness for UAV–edge–cloud Computing Environments. In Proceedings of the the 10th International Conference on Smart Media and Applications, Gunsan-si, Republic of Korea, 9–11 September 2021; pp. 60–63. [Google Scholar]
- Liu, B.; Huang, H.; Guo, S.; Chen, W.; Zheng, Z. Joint Computation Offloading and Routing Optimization for UAV–edge–cloud Computing Environments. In Proceedings of the 2018 IEEE SmartWorld, Ubiquitous Intelligence Computing, Advanced Trusted Computing, Scalable Computing Communications, Cloud Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Guangzhou, China, 8–12 October 2018; pp. 1745–1752. [Google Scholar] [CrossRef]
- King, A. Programming the Internet of Things: An Introduction to Building Integrated, Device-to-Cloud IoT Solutions; O’Reilly Media: Sebastopol, CA, USA, 2021. [Google Scholar]
- Serpanos, D. Internet-of-Things (IoT) Systems Architectures, Algorithms, Methodologies; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Cheng, N.; Lyu, F.; Quan, W.; Zhou, C.; He, H.; Shi, W.; Shen, X. Space/Aerial-Assisted Computing Offloading for IoT Applications: A Learning-Based Approach. IEEE J. Sel. Areas Commun. 2019, 37, 1117–1129. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J. UAV-Enhanced Intelligent Offloading for Internet of Things at the Edge. IEEE Trans. Ind. Inform. 2020, 16, 2737–2746. [Google Scholar] [CrossRef]
- Yu, Z.; Gong, Y.; Gong, S.; Guo, Y. Joint Task Offloading and Resource Allocation in UAV-Enabled Mobile Edge Computing. IEEE Internet Things J. 2020, 7, 3147–3159. [Google Scholar] [CrossRef]
- Li, L.; Wen, X.; Lu, Z.; Jing, W. An Energy Efficient Design of Computation Offloading Enabled by UAV. Sensors 2020, 20, 3363. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, S.; Zhang, Y. Cooperative Offloading and Resource Management for UAV-Enabled Mobile Edge Computing in Power IoT System. IEEE Trans. Veh. Technol. 2020, 69, 12229–12239. [Google Scholar] [CrossRef]
- Dai, M.; Su, Z.; Xu, Q.; Zhang, N. Vehicle Assisted Computing Offloading for Unmanned Aerial Vehicles in Smart City. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1932–1944. [Google Scholar] [CrossRef]
- Alhelaly, S.; Muthanna, A.; Elgendy, I.A. Optimizing Task Offloading Energy in Multi-User Multi-UAV-Enabled Mobile Edge-Cloud Computing Systems. Appl. Sci. 2022, 12, 6566. [Google Scholar] [CrossRef]
- Huang, W.; Guo, H.; Liu, J. Task Offloading in UAV Swarm-Based Edge Computing: Grouping and Role Division. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Messous, M.A.; Senouci, S.M.; Sedjelmaci, H.; Cherkaoui, S. A Game Theory Based Efficient Computation Offloading in an UAV Network. IEEE Trans. Veh. Technol. 2019, 68, 4964–4974. [Google Scholar] [CrossRef]
- Tang, Q.; Chang, L.; Yang, K.; Wang, K.; Wang, J.; Sharma, P.K. Task number maximization offloading strategy seamlessly adapted to UAV scenario. Comput. Commun. 2020, 151, 19–30. [Google Scholar] [CrossRef]
- Ateya, A.A.A.; Muthanna, A.; Kirichek, R.; Hammoudeh, M.; Koucheryavy, A. Energy- and Latency-Aware Hybrid Offloading Algorithm for UAVs. IEEE Access 2019, 7, 37587–37600. [Google Scholar] [CrossRef]
- Bai, T.; Wang, J.; Ren, Y.; Hanzo, L. Energy-Efficient Computation Offloading for Secure UAV-Edge-Computing Systems. IEEE Trans. Veh. Technol. 2019, 68, 6074–6087. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Chen, S.; Luo, S.; Wang, Q.; Cao, B.; Li, X. An intelligent task offloading algorithm (iTOA) for UAV edge computing network. Digit. Commun. Netw. 2020, 6, 433–443. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, K.; Tan, Z.; Li, X.; Sharma, S.; Liu, Z. A Novel Cost Optimization Strategy for SDN-Enabled UAV-Assisted Vehicular Computation Offloading. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3664–3674. [Google Scholar] [CrossRef]
- Li, J.; Liu, Q.; Wu, P.; Shu, F.; Jin, S. Task Offloading for UAV-based Mobile Edge Computing via Deep Reinforcement Learning. In Proceedings of the 2018 IEEE/CIC International Conference on Communications in China (ICCC), Beijing, China, 16–18 August 2018; pp. 798–802. [Google Scholar] [CrossRef]
- Qi, W.; Sun, H.; Yu, L.; Xiao, S.; Jiang, H. Task Offloading Strategy Based on Mobile Edge Computing in UAV Network. Entropy 2022, 24, 736. [Google Scholar] [CrossRef]
- Simon, D. Evolutionary Optimization Algorithms; Wiley: New York, NY, USA, 2013. [Google Scholar]
- Wirsansky, E. Hands-On Genetic Algorithms with Python: Applying Genetic Algorithms to Solve Real-World Deep Learning and Artificial Intelligence Problems; Packt Publishing: Birmingham, UK, 2020. [Google Scholar]
- Hussain, A.; Manikanthan, S.V.; Padmapriya, T.; Nagalingam, M. Genetic algorithm based adaptive offloading for improving IoT device communication efficiency. Wirel. Netw. 2019, 26, 2329–2338. [Google Scholar] [CrossRef]
- Liao, Z.; Peng, J.; Xiong, B.; Huang, J. Adaptive offloading in mobile-edge computing for ultra-dense cellular networks based on genetic algorithm. J. Cloud Comput. 2021, 10, 1–16. [Google Scholar] [CrossRef]
- Wang, H. Collaborative Task Offloading Strategy of UAV Cluster Using Improved Genetic Algorithm in Mobile Edge Computing. J. Robot. 2021, 2021, 3965689. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, Q. Genetic Algorithm-Based Optimization of Offloading and Resource Allocation in Mobile-Edge Computing. Information 2020, 11, 83. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Zheng, H.; Zhang, J.; Zheng, X.; Rong, C. Joint computational offloading and deployment optimization in multi-UAV-enabled MEC systems. Peer-Peer Netw. Appl. 2022, 15, 194–205. [Google Scholar] [CrossRef]
- Chakraborty, S.; Mazumdar, K. Sustainable task offloading decision using genetic algorithm in sensor mobile edge computing. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 1552–1568. [Google Scholar] [CrossRef]
- Huda, S.A.; Moh, S. Survey on computational offloading in UAV-Enabled mobile edge computing. J. Netw. Comput. Appl. 2022, 201, 103341. [Google Scholar] [CrossRef]
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Comprehensive Energy Consumption Model for Unmanned Aerial Vehicles, Based on Empirical Studies of Battery Performance. IEEE Access 2018, 6, 58383–58394. [Google Scholar] [CrossRef]
- Muzaffar, R.; Raffelsberger, C.; Fakhreddine, A.; Luque, J.L.; Emini, D.; Bettstetter, C. First Experiments with a 5G-Connected Drone. In Proceedings of the 6th ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, DroNet ’20, Toronto, ON, Canada, 19 June 2020; Association for Computing Machinery: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Huang, J.; Qian, F.; Gerber, A.; Mao, Z.; Sen, S.; Spatscheck, O. A close examination of performance and power characteristics of 4G LTE networks. In Proceedings of the MobiSys’12—10th International Conference on Mobile Systems, Applications, and Services, Lake District, UK, 25–29 June 2012; pp. 225–238. [Google Scholar] [CrossRef]
- Van Giang, D.; Taleb, T.; Hashimoto, K.; Kato, N.; Nemoto, Y. A Fair and Lifetime-Maximum Routing Algorithm for Wireless Sensor Networks. In Proceedings of the IEEE GLOBECOM 2007—IEEE Global Telecommunications Conference, Washington, DC, USA, 26–30 November 2007; pp. 581–585. [Google Scholar] [CrossRef]
- Dusza, B.; Ide, C.; Cheng, L.; Wietfeld, C. An accurate measurement-based power consumption model for LTE uplink transmissions. In Proceedings of the 2013 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Turin, Italy, 14–19 April 2013; pp. 49–50. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Descriptions |
|---|---|
| V | Set of all nodes that could be UAVs, edge servers, and cloud servers |
| E | Set of all topological network links between nodes |
| W | Set of all workflows to be allocated |
| The i-th workflow that needed to be allocated | |
| Set of all tasks in a workflow | |
| Remaining network bandwidth of link from v to | |
| Remaining computational processing rate of the node v | |
| The amount of network bandwidth required between task t and | |
| The amount of computational processing rate required for task t | |
| The summation of energy consumption of node v | |
| The amount of energy consumption of node v to process the computation of given tasks | |
| The amount of energy consumed to receive data required to perform tasks performed in node v | |
| The amount of energy consumed to transfer the results of given tasks in node v to the next node | |
| Total energy consumption of all nodes in the system | |
| The result of the allocability check for the workflow | |
| Energy consumption fairness value | |
| A threshold value of energy consumption fairness | |
| Task allocation information of the workflow i on network topology |
| Common Parameters | Topology | ||
|---|---|---|---|
| Small | Medium | Large | |
| Field size (m) | 50 × 50 | 100 × 100 | 200 × 200 |
| Drone’s transmission range (m) | 10 | 30 | 50 |
| Number of drones | 10 | 30 | 100 |
| Number of edge servers | 4 | 4 | 4 |
| Number of cloud servers | 2 | 2 | 2 |
| Processing rate of a drone | 100 | ||
| Processing rate of an edge server | 500 | ||
| Processing rate of a cloud server | 10,000 | ||
| Network bandwidth of a drone (Mb/s) | 200 | ||
| Network bandwidth of an edge server (Mb/s) | 400 | ||
| Network bandwidth of a cloud server (Mb/s) | 1000 | ||
| Number of workflows | 4 | 20 | 30 |
| Number of tasks per workflow | 4 | 4 | 4–6 |
| Processing rate required for each task | 40–80 | 20–30 | 20–30 |
| Network bandwidth required for each task (Mb/s) | 20–30 | 20–30 | 20–30 |
| Scheme-Dependent Parameters | Topology | ||
| Small | Medium | Large | |
| Number of chromosomes in a population (GA-based) | 10,000 | ||
| Number of iterations (GA-based) | 100,000 | 1,000,000 | 1,000,000 |
| Number of iterations (MA-based) | 2000 | ||
| Component | Specification |
|---|---|
| CPU | Intel Core i7 13,700 K |
| Main memory | 32 GB |
| Interpreter | Python 3.8 |
| Library | Matplotlib 3.4.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, B.; Jang, J.; Jung, J.; Han, J.; Heo, J.; Min, H. A Computation Offloading Scheme for UAV-Edge Cloud Computing Environments Considering Energy Consumption Fairness. Drones 2023, 7, 139. https://doi.org/10.3390/drones7020139
Kim B, Jang J, Jung J, Han J, Heo J, Min H. A Computation Offloading Scheme for UAV-Edge Cloud Computing Environments Considering Energy Consumption Fairness. Drones. 2023; 7(2):139. https://doi.org/10.3390/drones7020139
Chicago/Turabian StyleKim, Bongjae, Joonhyouk Jang, Jinman Jung, Jungkyu Han, Junyoung Heo, and Hong Min. 2023. "A Computation Offloading Scheme for UAV-Edge Cloud Computing Environments Considering Energy Consumption Fairness" Drones 7, no. 2: 139. https://doi.org/10.3390/drones7020139