
Improved Particle Swarm Optimization Fractional-System Identification Algorithm for Electro-Optical Tracking System


Abstract
:1. Introduction
2. Mathematical Preliminaries
2.1. Definitions of Fractional Derivatives and Integrals
2.2. The Laplace Transform of Fractional Derivative
2.3. Mathematical Description of Fractional Systems
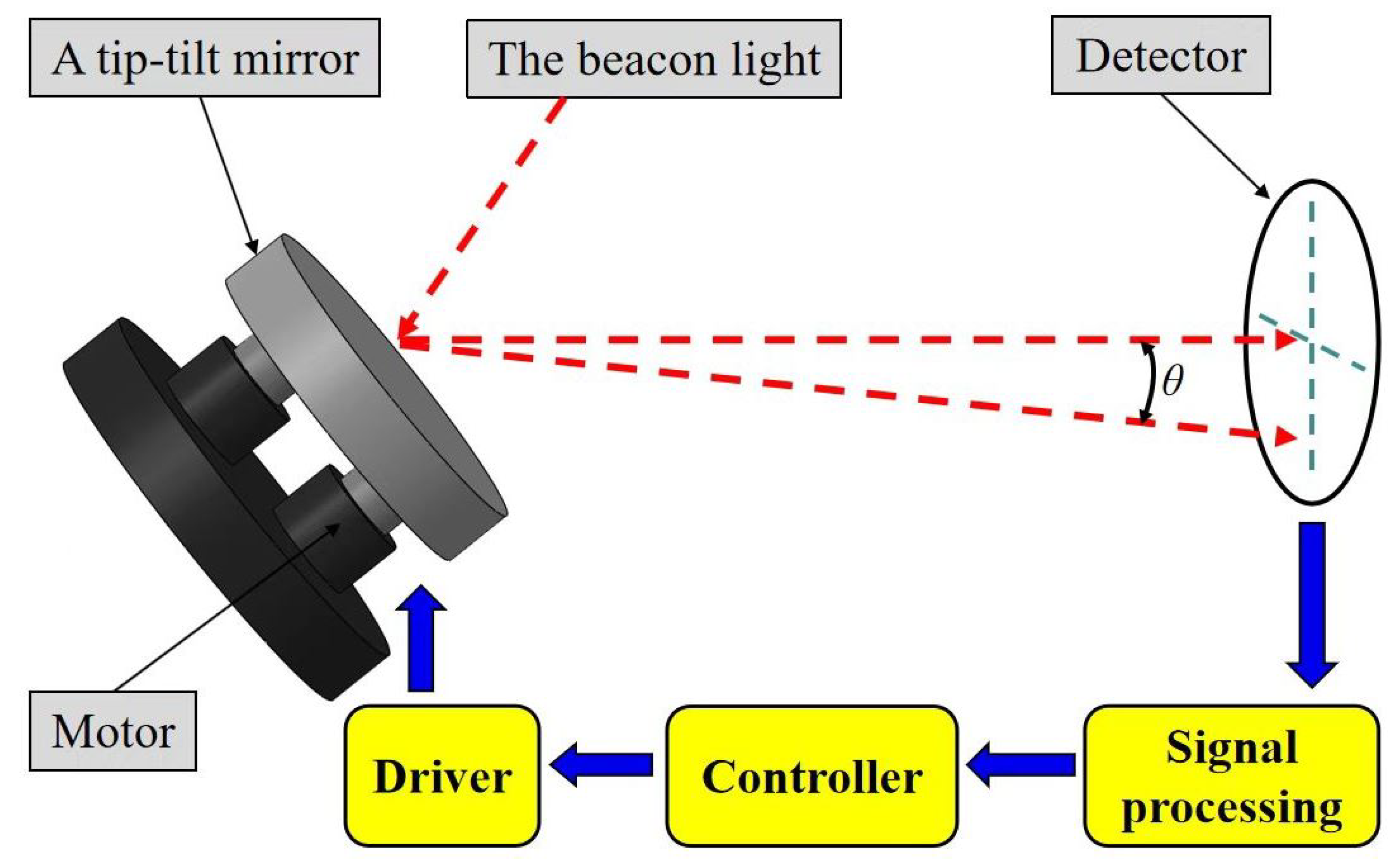
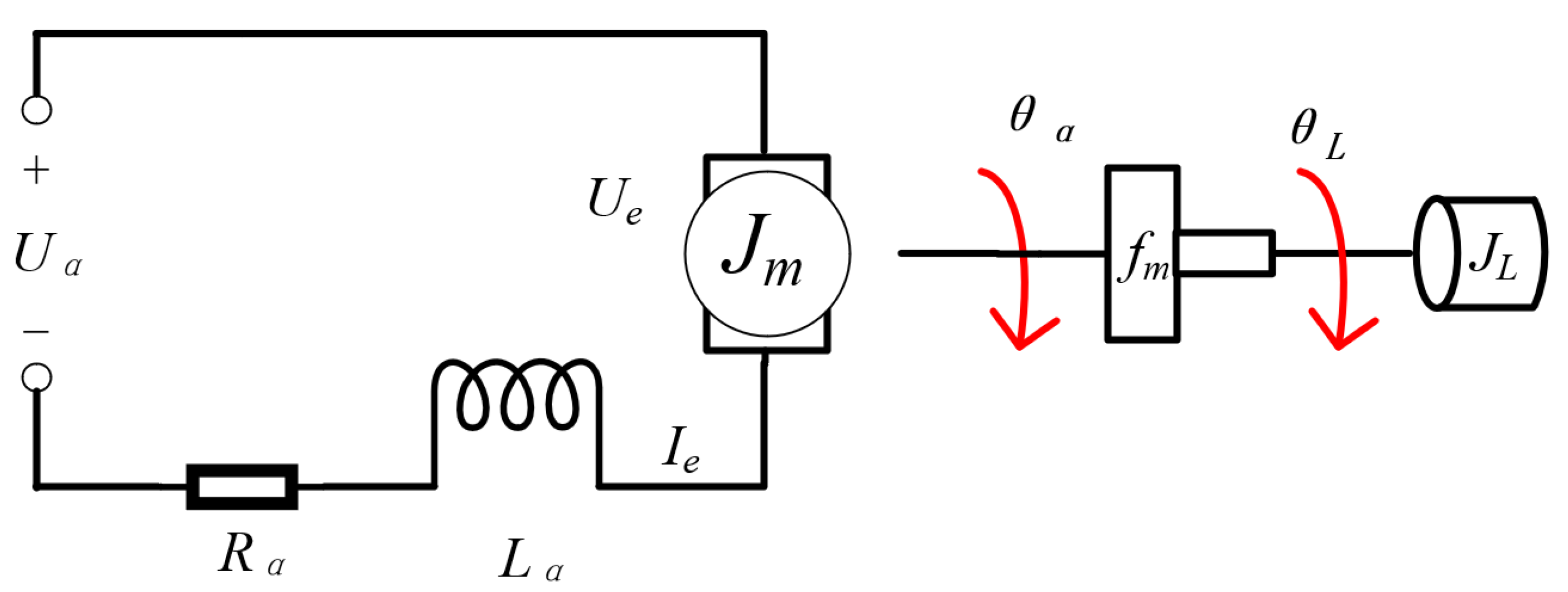
3. ETS Model Analysis
4. Improved Particle Swarm Optimization Algorithm
4.1. Particle Swarm Optimization Algorithm
4.2. Block Pulse Functions
4.3. The Performance Index Function Based on Block Pulse Functions
5. ETS System Identification Based on BPF-PSO
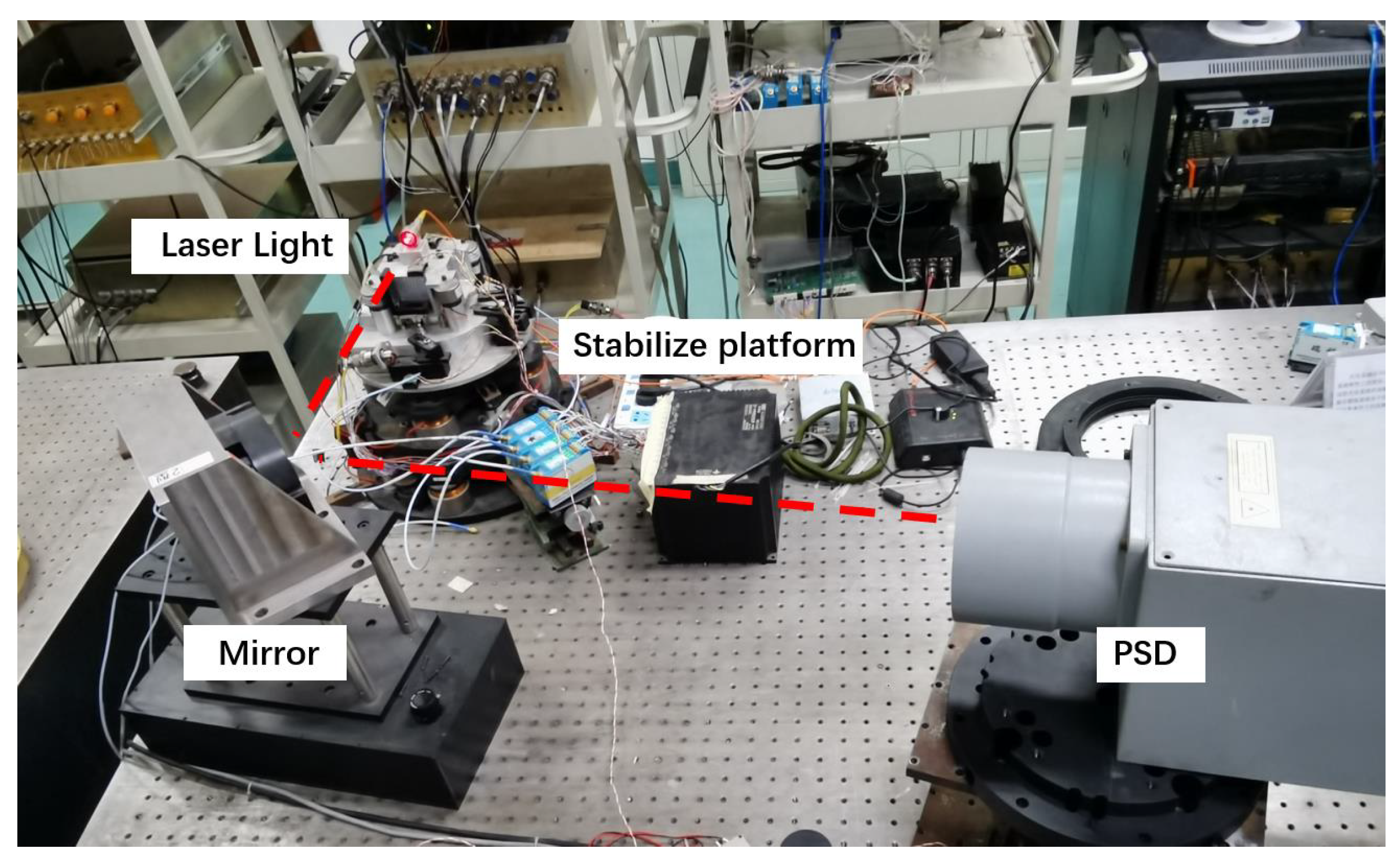
5.1. Experimental Apparatus
5.2. Running Speed Verification
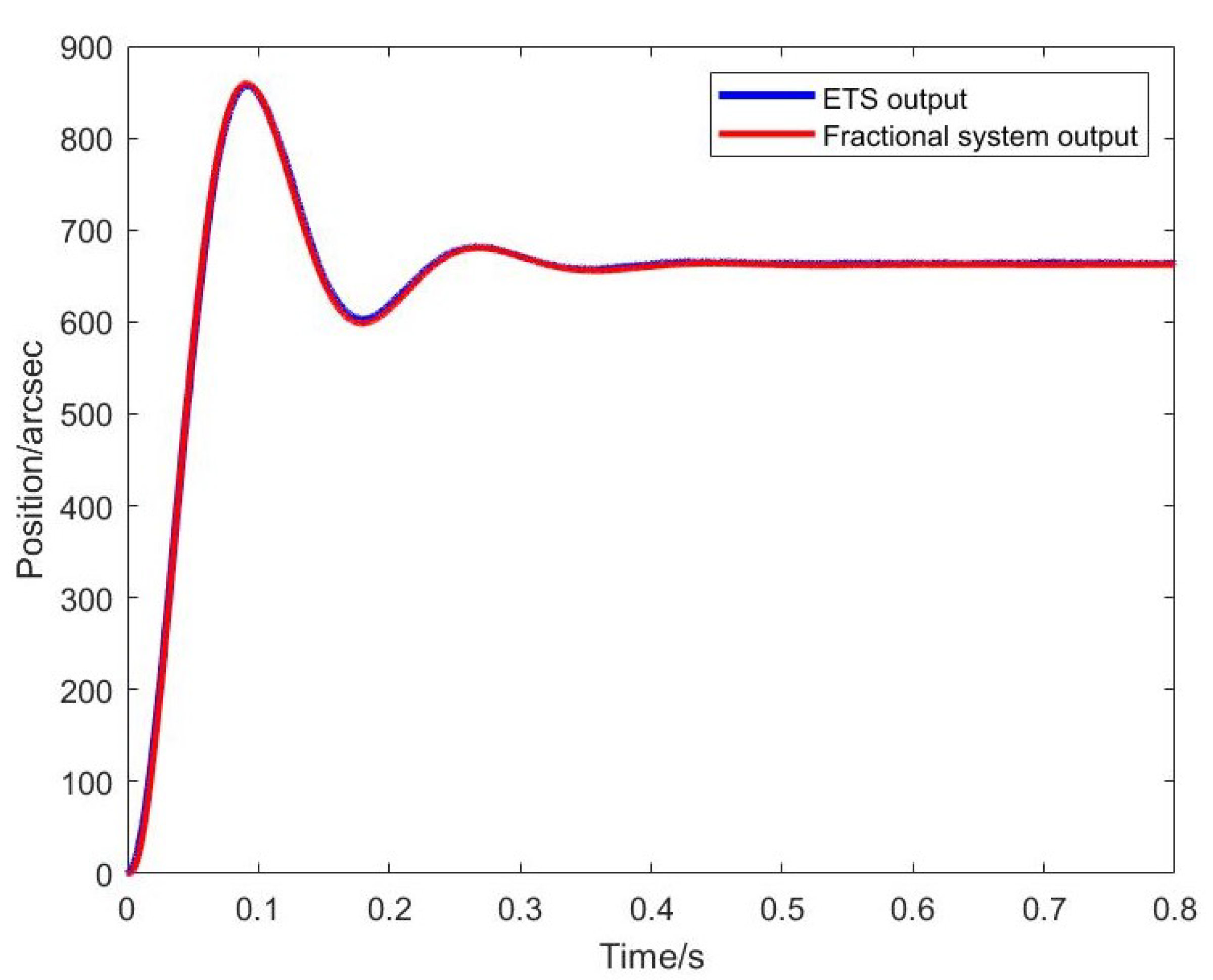
5.3. ETS Identification
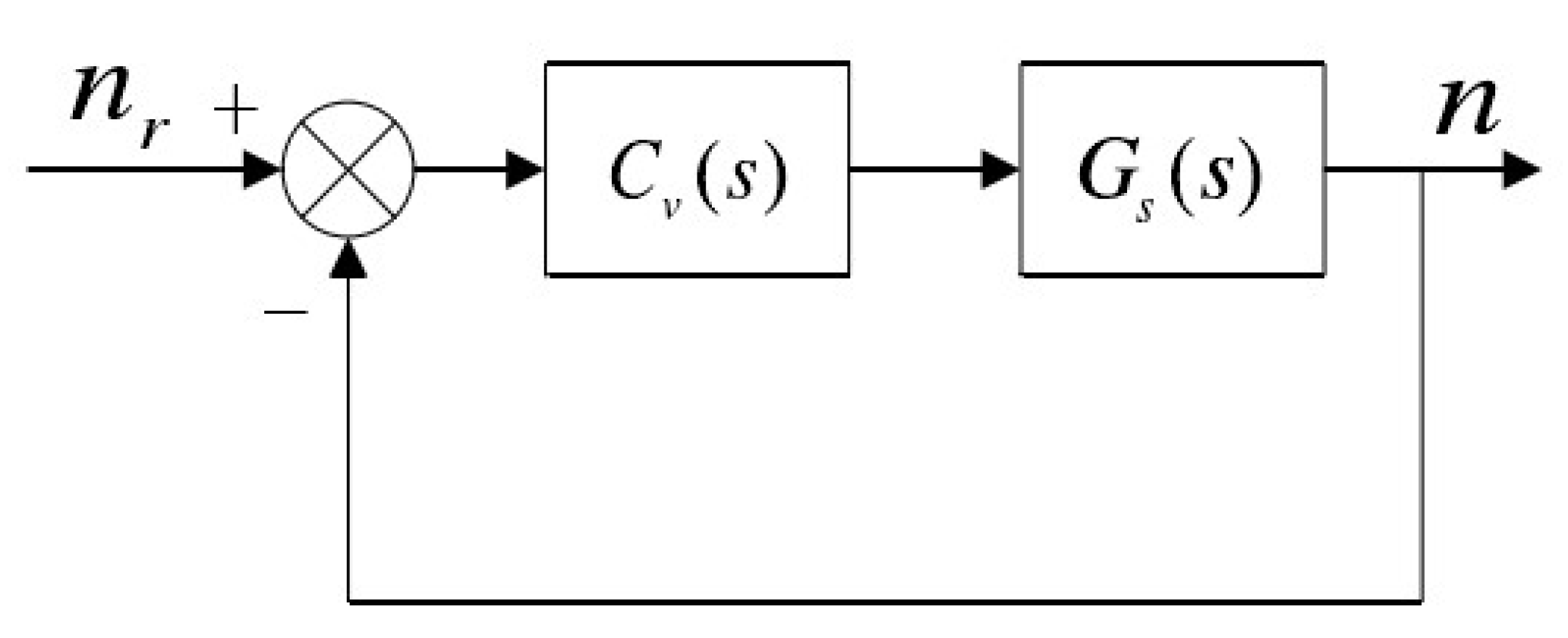
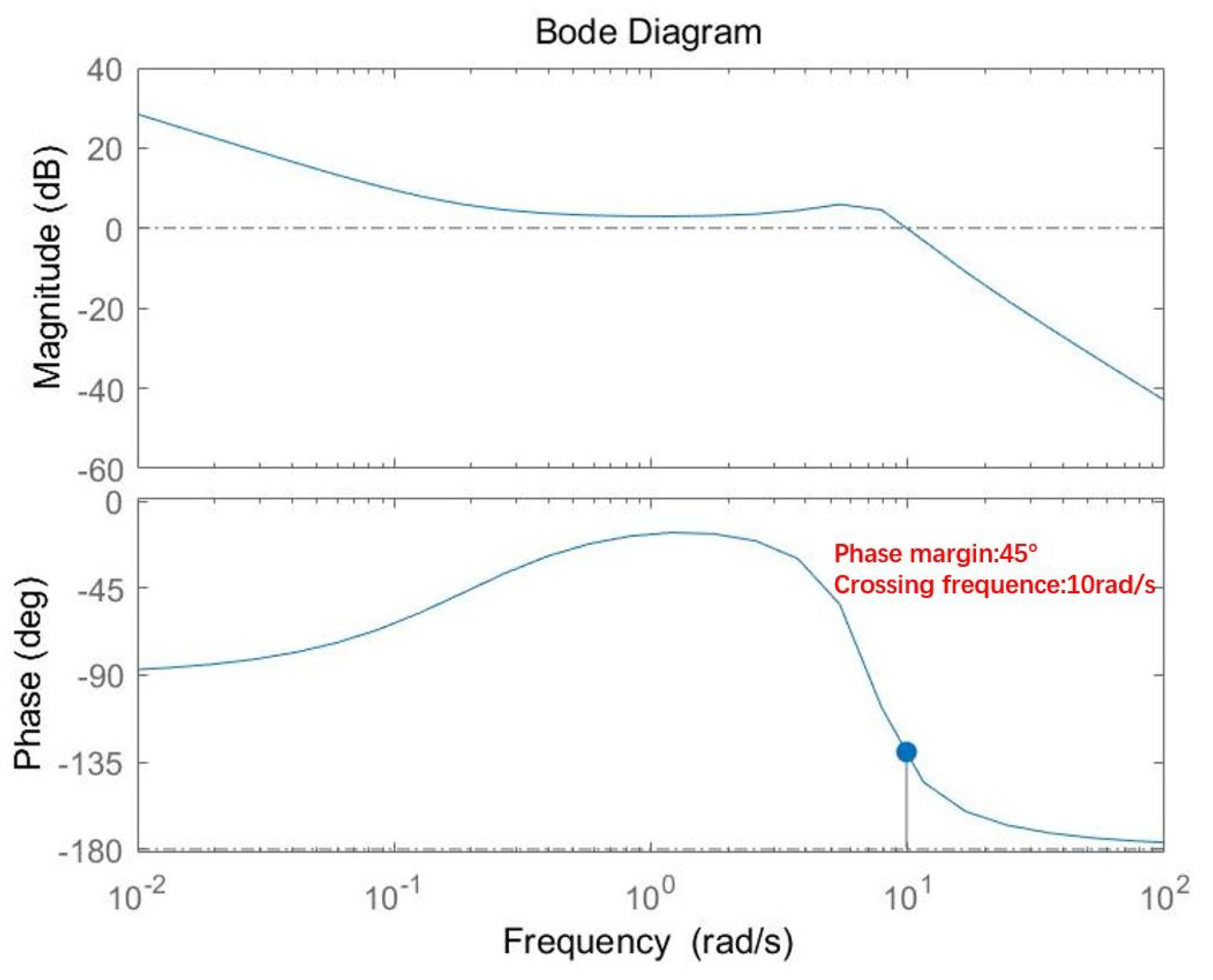
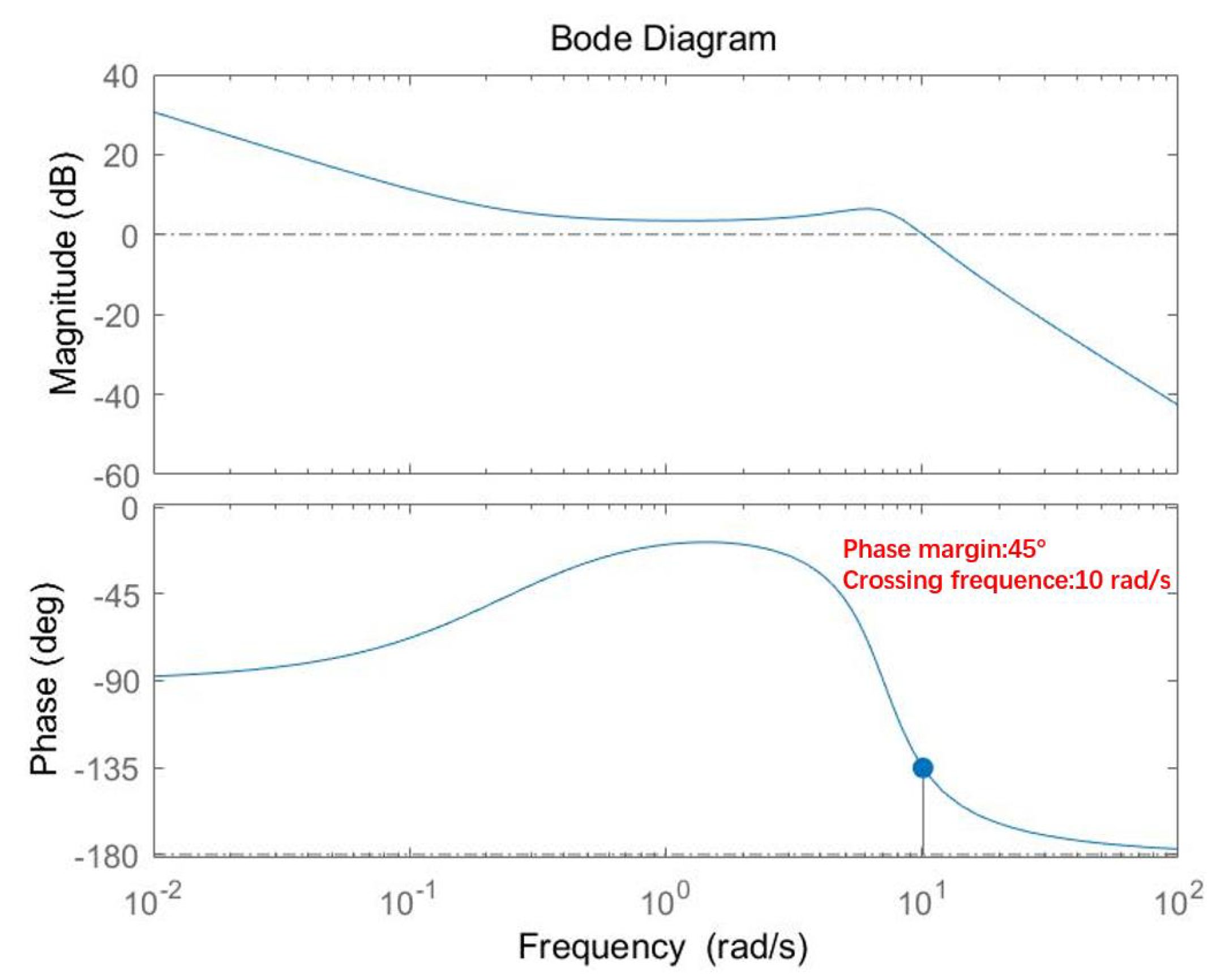
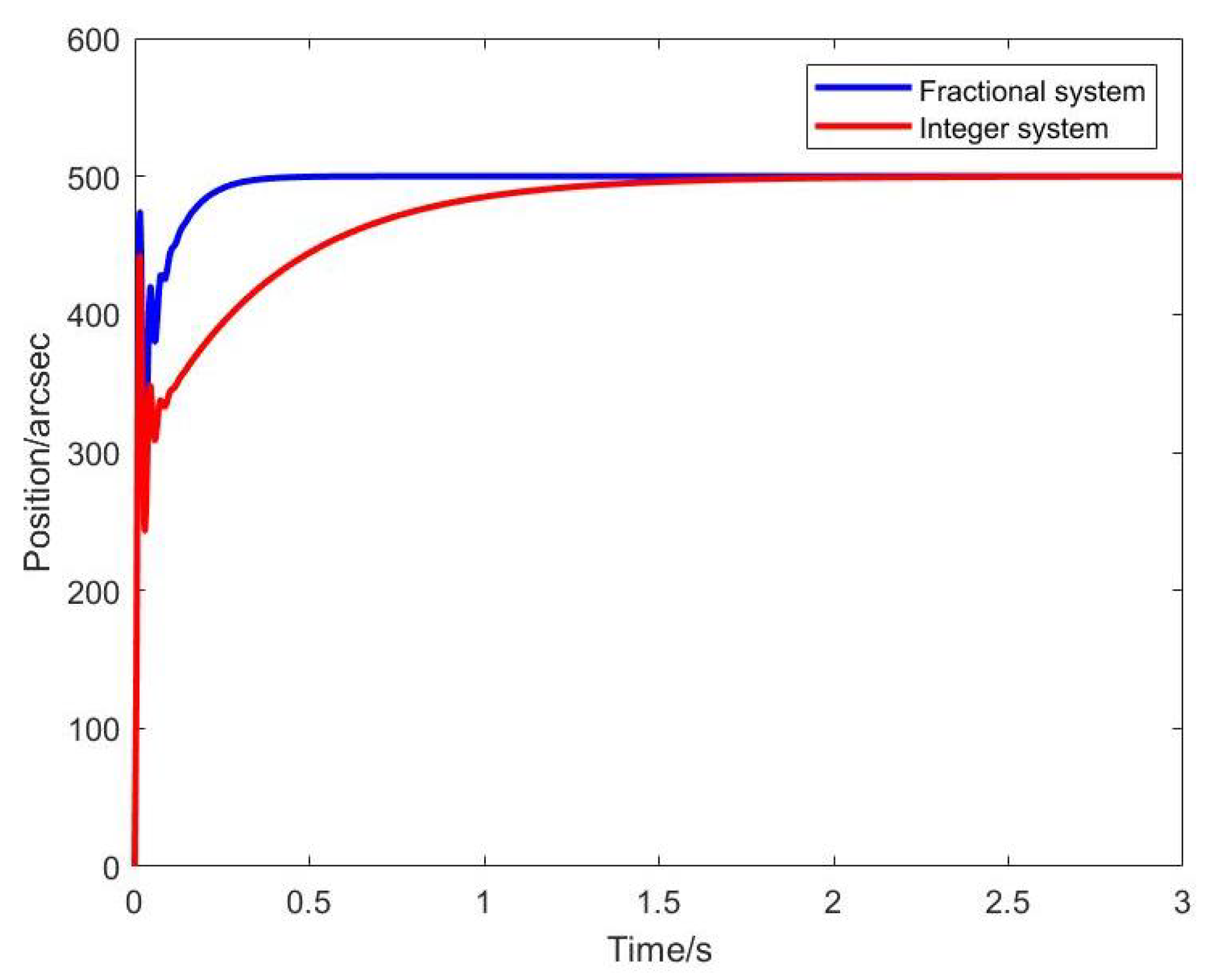
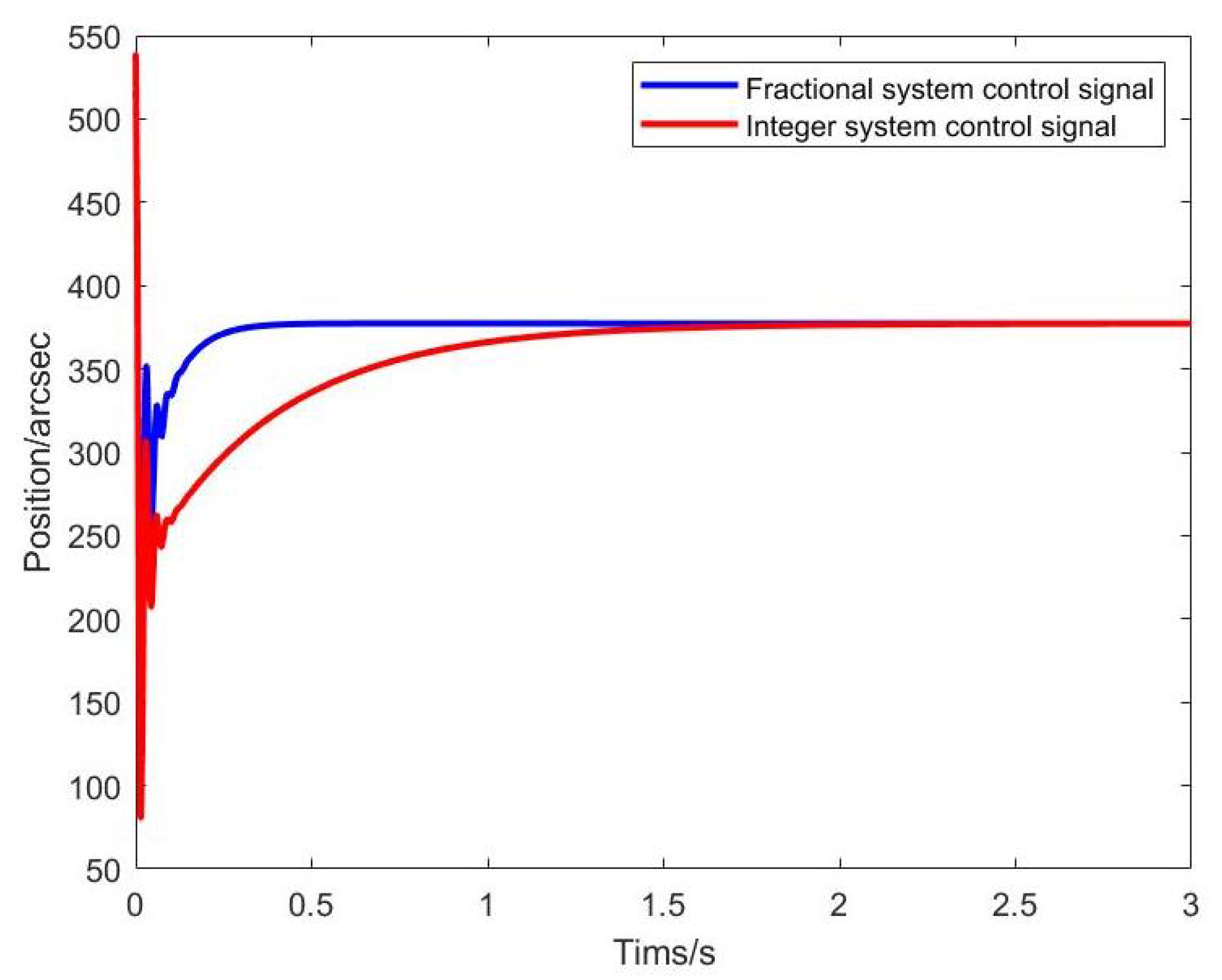
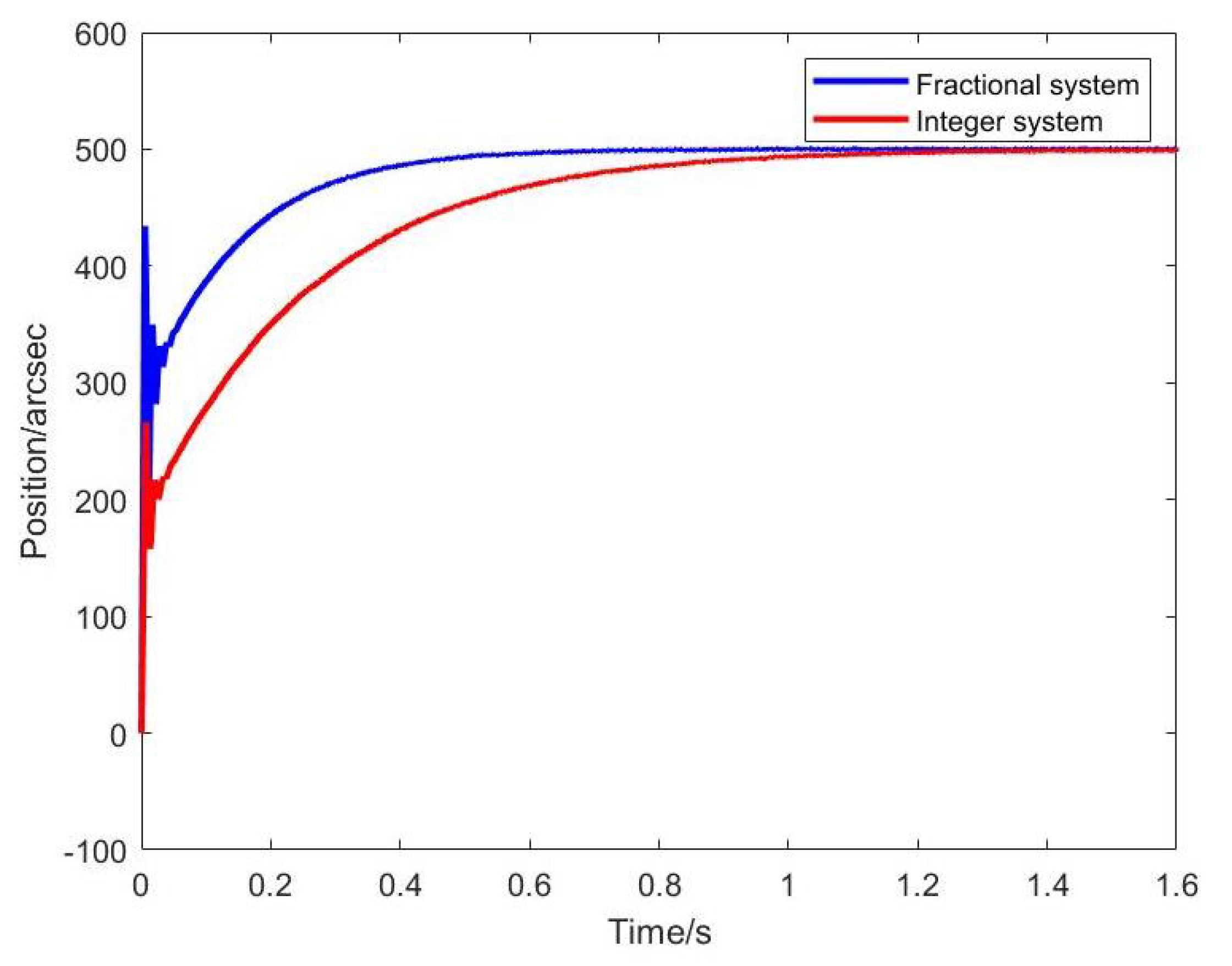
6. Experimental Verification of the Control Performance
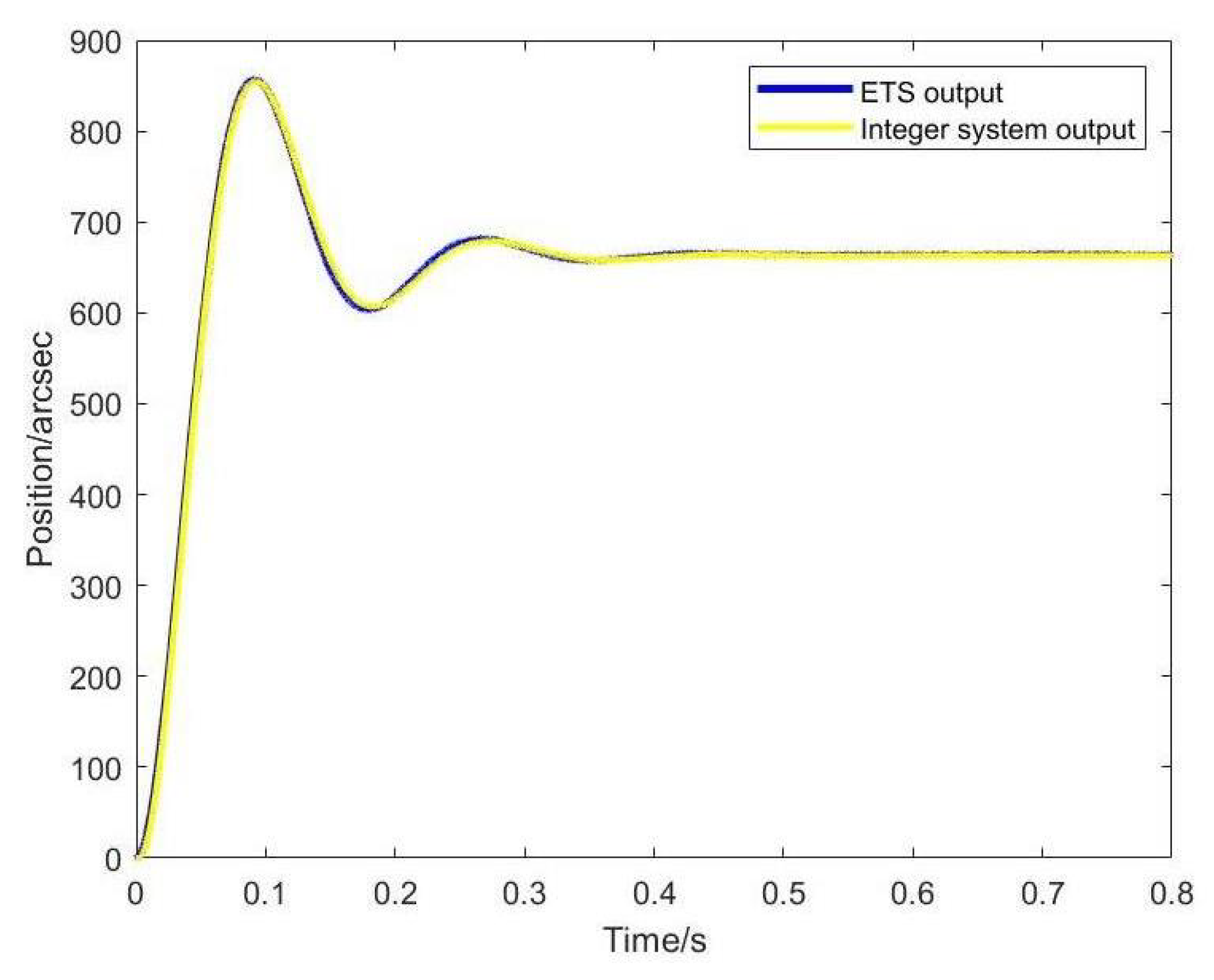
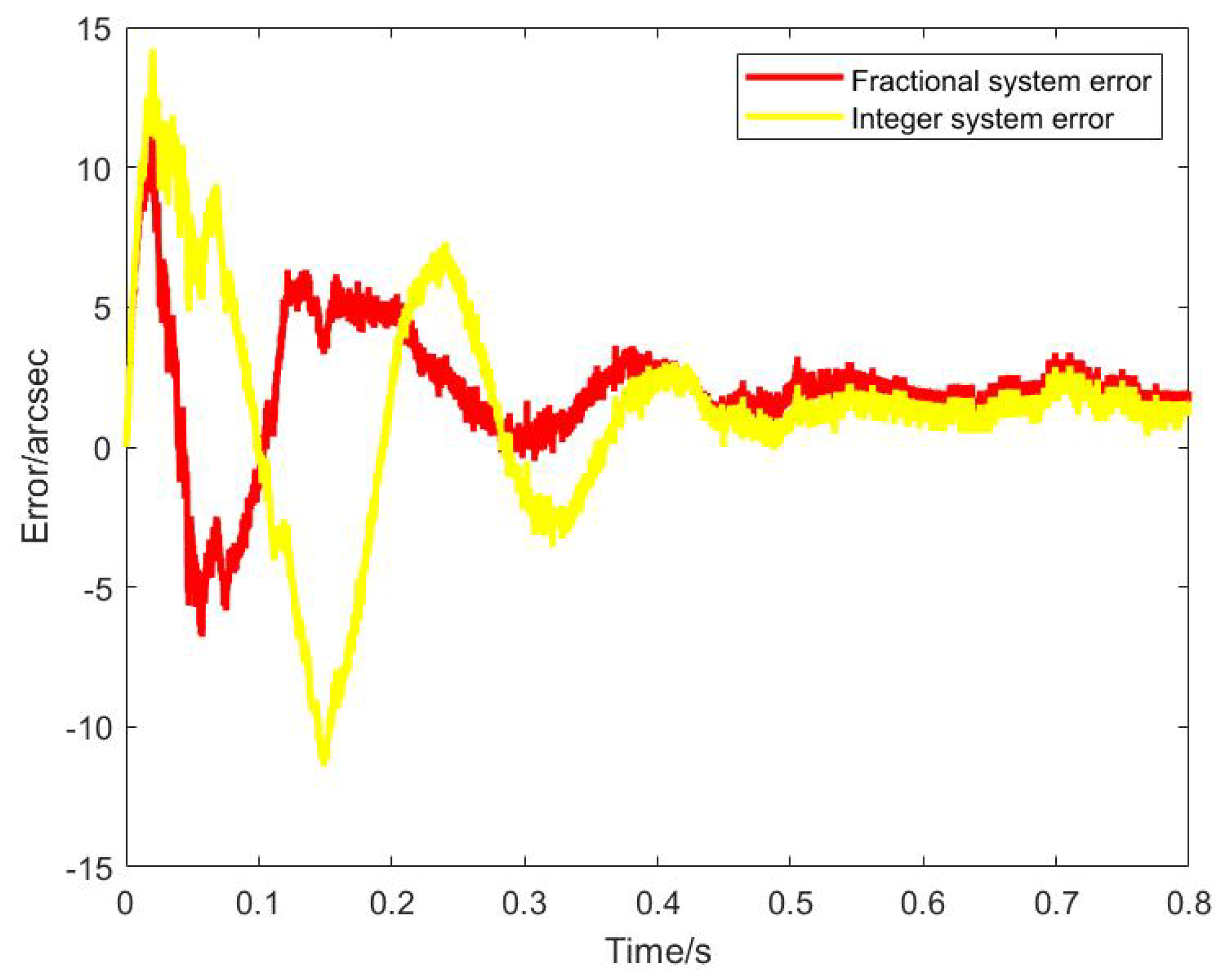
6.1. Tracking Performance of Fractional Order ETS
6.2. Experimental Platform Control Effect
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ETS | Electro-optical tracking system |
| FSM | Fast steering mirror |
| PSD | Position sensitive detector |
References
- Ulich, B.L. Overview Of Acquisition, Tracking, And Pointing System Technologies. Int. Soc. Opt. Photonics 1988, 887, 40–63. [Google Scholar]
- Ma, J.; Tang, T. Review of compound axis servomechanism tracking control technology. Infrared Laser Eng. 2013, 42, 218–227. [Google Scholar]
- Liao, S.K.; Cai, W.Q.; Liu, W.Y.; Liang, Z.; Yang, L.; Ren, J.G.; Yin, J.; Shen, Q.; Yuan, C.; Li, Z.P. Satellite-to-ground quantum key distribution. Nature 2017, 549, 43–47. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yin, J.; Cao, Y.; Pan, J.W.; Li, Y.H.; Liao, S.K.; Zhang, L.; Ren, J.; Cai, W.; Liu, W.; Li, B.; et al. Satellite-based entanglement distribution over 1200 kilometers. Science 2017, 356, 1140–1144. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, H.; Ma, J.; Wang, Q.; Wu, Q. Identification of transfer function in fast control mirror system. Opto-Electron. Eng. 2005, 32, 4. [Google Scholar]
- Wang, S.; Chen, T.; Li, H.; Wang, J. Frequency characteristic test and model identification of photoelectric tracking servo system. Opt. Precis. Eng. 2009, 17, 79–84. [Google Scholar]
- Li, J.; Chen, K.; Peng, Q.; Wang, Z.; Jiang, Y.; Fu, C.; Ren, G. Improvement of pointing accuracy for Risley prisms by parameter identification. Appl. Opt. 2017, 56, 7358–7366. [Google Scholar] [CrossRef]
- Huang, L.; Ma, X.; Bian, Q.; Li, T.; Zhou, C.; Gong, M. High-precision system identification method for a deformable mirror in wavefront control. Appl. Opt. 2015, 54, 4313–4317. [Google Scholar] [CrossRef]
- Petrá, I. Fractional-Order Nonlinear Systems: Modeling, Analysis and Simulation; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Torvik, P.J.; Bagley, R.L. On the Appearance of the Fractional Derivative in the Behavior of Real Materials. J. Appl. Mech. 1984, 51, 725–728. [Google Scholar] [CrossRef]
- Daou, R.A.Z.; Francis, C.; Moreau, X. Synthesis and implementation of non-integer integrators using RLC devices. Int. J. Electron. 2009, 96, 1207–1223. [Google Scholar] [CrossRef]
- Wei, Y.; Ying, L.; Pi, Y.G. Fractional order modeling and control for permanent magnet synchronous motor velocity servo system. Mechatronics 2013, 23, 813–820. [Google Scholar]
- Oustaloup, A.; Le Lay, L.; Mathieu, B. Identification of non-integer order system in the time-domain. Proc. CESA 1996, 96, 9–12. [Google Scholar]
- Djounambi, A.; Voda, A.; Charef, A. Recursive prediction error identification of fractional order models. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 2517–2524. [Google Scholar] [CrossRef]
- Poinot, T.; Trigeassou, J. Identification of fractional systems using an output error technique. J. Nonlinear Dyn. 2004, 38, 133–154. [Google Scholar] [CrossRef]
- Lin, J.; Poinot, T.; Li, S.; Trigeassou, J. Identification of non-integer order systems in frequency domain. J. Control Theory Appl. 2008, 25, 517–520. [Google Scholar]
- Valerio, D.; Costa, J. Identifying digital and fractional transfer functions from a frequency response. Int. J. Control 2011, 84, 445–457. [Google Scholar] [CrossRef]
- Idiou, D.; Charef, A.; Djouambi, A. Linear fractional order system identification using adjustable fractional order differentiator. IET Signal Process. 2014, 8, 398–409. [Google Scholar] [CrossRef]
- Gude, J.J.; Garcia Bringas, P. Proposal of a General Identification Method for Fractional-Order Processes Based on the Process Reaction Curve. Fractal Fract. 2022, 6, 526. [Google Scholar] [CrossRef]
- Wu, D.; Ma, Z.; Li, A.; Zhu, Q. Identification for fractional order rational models based on particle swarm optimisation. Int. J. Comput. Appl. Technol. 2011, 41, 53–59. [Google Scholar] [CrossRef]
- Mansouri, R.; Bettayeb, M.; Djamah, T.; Djennoune, S. Vector Fitting fractional system identification using particle swarm optimization. Appl. Math. Comput. 2008, 206, 510–520. [Google Scholar] [CrossRef]
- Luo, Y.; Mao, Y.; Ren, W.; Huang, Y.; Deng, C.; Zhou, X. Multiple Fusion Based on the CCD and MEMS Accelerometer for the Low-Cost Multi-Loop Optoelectronic System Control. Sensors 2018, 18, 2153. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, Y.; Liu, H.; Wang, W.; Lian, Q.; Guan, X. Parameter identification of fractional order systems using block pulse functions. Signal Process. 2015, 107, 272–281. [Google Scholar]
- Pudlubny, I. Fractional Differential Equations; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Wang, C. On the generalization of block pulse operational matrices for fractional calculus and applications. J. Frankl. Inst. 1983, 315, 91–102. [Google Scholar]
- Miller, K.; Ross, B. An Introduction to the Fraction Calculus and Fractional Differential Equations; Wiley-Interscience: Hoboken, NJ, USA, 2008. [Google Scholar]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-Order Systems and Control: Fundamentals and Applications. In Advances in Industrial Control; Springer: Berlin/Heidelberg, Germany, 2010; p. 3. [Google Scholar]
- Zhang, B.; Nie, K.; Chen, X.; Mao, Y. Development of Sliding Mode Controller Based on Internal Model Controller for Higher Precision Electro-Optical Tracking System. Actuators 2022, 11, 16. [Google Scholar] [CrossRef]
- Liu, B.; Wang, L.; Jin, Y.H.; Fang, T.; Huang, D.X. Improved particle swarm optimization combined with chaos. Chaos Solitons Fractals 2005, 25, 1261–1271. [Google Scholar] [CrossRef]
- Levenberg, K. A Method for the Solution of Certain Non-Linear Problems in Least Squares. Q. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef] [Green Version]
- Monje, C.; Calderon, A.; Vinagre, B.; Chen, Y.; Feliu, V. On fractional PI lambda controllers: Some tuning rules for robustness to plant uncertainties. Nonlinear Dyn. 2004, 38, 369–381. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| M | Time/s | J |
|---|---|---|
| 50 | ||
| 100 | ||
| 200 | ||
| 400 | ||
| 800 | ||
| 1600 |
| b | ||||||
|---|---|---|---|---|---|---|
| b | ||||||
|---|---|---|---|---|---|---|
| 2 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, T.; Deng, J.; Mao, Y.; Zhou, X. Improved Particle Swarm Optimization Fractional-System Identification Algorithm for Electro-Optical Tracking System. Fractal Fract. 2023, 7, 264. https://doi.org/10.3390/fractalfract7030264
Guo T, Deng J, Mao Y, Zhou X. Improved Particle Swarm Optimization Fractional-System Identification Algorithm for Electro-Optical Tracking System. Fractal and Fractional. 2023; 7(3):264. https://doi.org/10.3390/fractalfract7030264
Chicago/Turabian StyleGuo, Tong, Jiuqiang Deng, Yao Mao, and Xi Zhou. 2023. "Improved Particle Swarm Optimization Fractional-System Identification Algorithm for Electro-Optical Tracking System" Fractal and Fractional 7, no. 3: 264. https://doi.org/10.3390/fractalfract7030264