
Bidirectional Jump Point Search Path-Planning Algorithm Based on Electricity-Guided Navigation Behavior of Electric Eels and Map Preprocessing
 ,
,
Abstract
:1. Introduction
- (1)
- The robot can run safely without collision from start to target.
- (2)
- The robot is capable of real-time path planning.
- (3)
- The robot should take the shortest and simplest path.
- (4)
- The path-finding algorithm of the robot uses as little memory as possible.
- (1)
- An improved heuristic function is proposed, which can speed up the path search efficiency and reduce the number of path search points while maintaining the shortest path.
- (2)
- To reduce algorithm implementation complexity in jump point screening, a new jump point screening strategy is proposed. This involves converting jump points into turning points at obstacles, thereby decreasing the number of unnecessary jump points on the map and accelerating the jump point screening process.
- (3)
- In order to decrease the number of visited nodes, the neighborhood search principle is modified to a five-domain search. This more compact approach to searching improves the efficiency of the target point search.
- (4)
- To further optimize the search efficiency, a bidirectional search strategy is introduced. In this approach, JPS+ search is performed from both the starting point and the goal point, and it is guided by the sequence of preprocessed jump points. This method increases the search efficiency of the algorithm.
- (5)
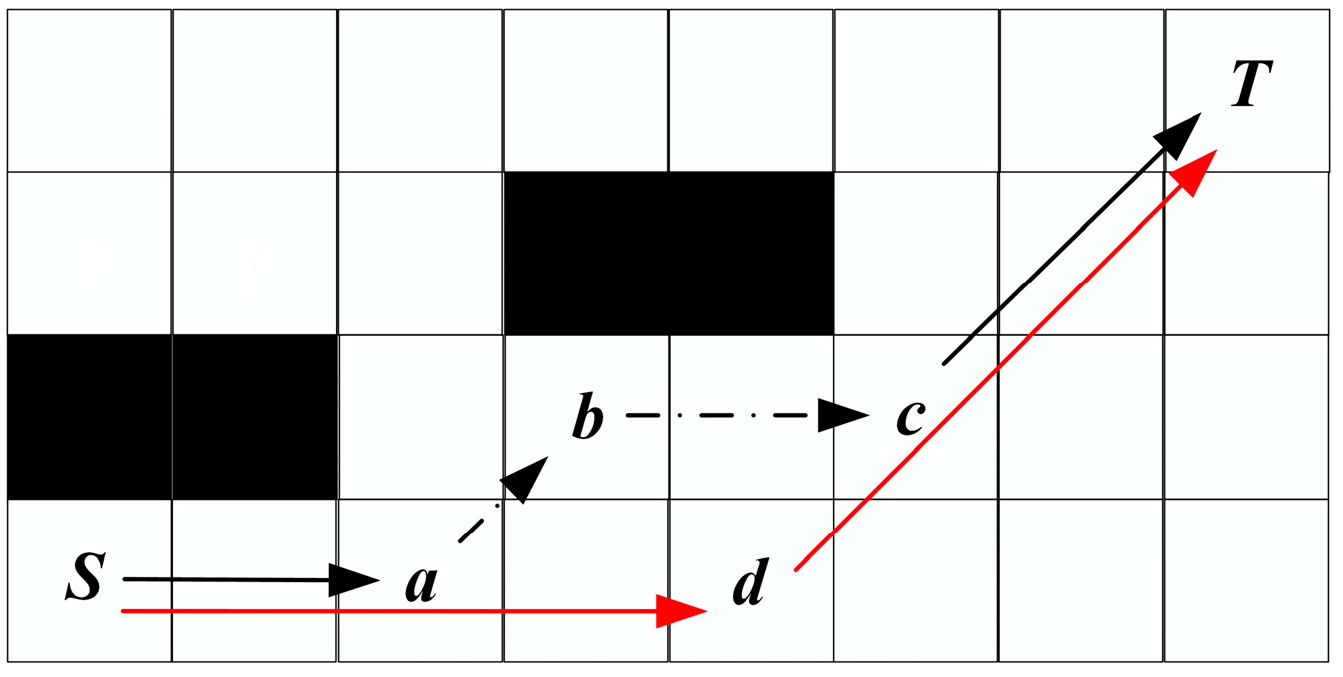
- In order to reduce the number of inflection points and the path length in the path nodes, a rewiring strategy is presented in this study. The initial path may contain a large number of inflection points. Therefore, the parallelogram rewiring strategy is utilized to prune the path nodes.
2. Related Work
2.1. Grid Map Building
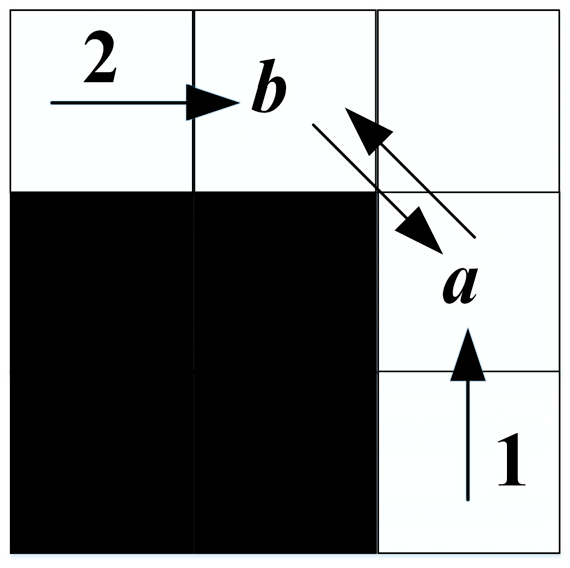
2.2. Original Algorithm Model
- (1)
- Nodes with forced neighbors;
- (2)
- Target points;
- (3)
- Points in the diagonal direction of node x that satisfy conditions 1 and 2 for a diagonal search.
3. Improved Algorithm
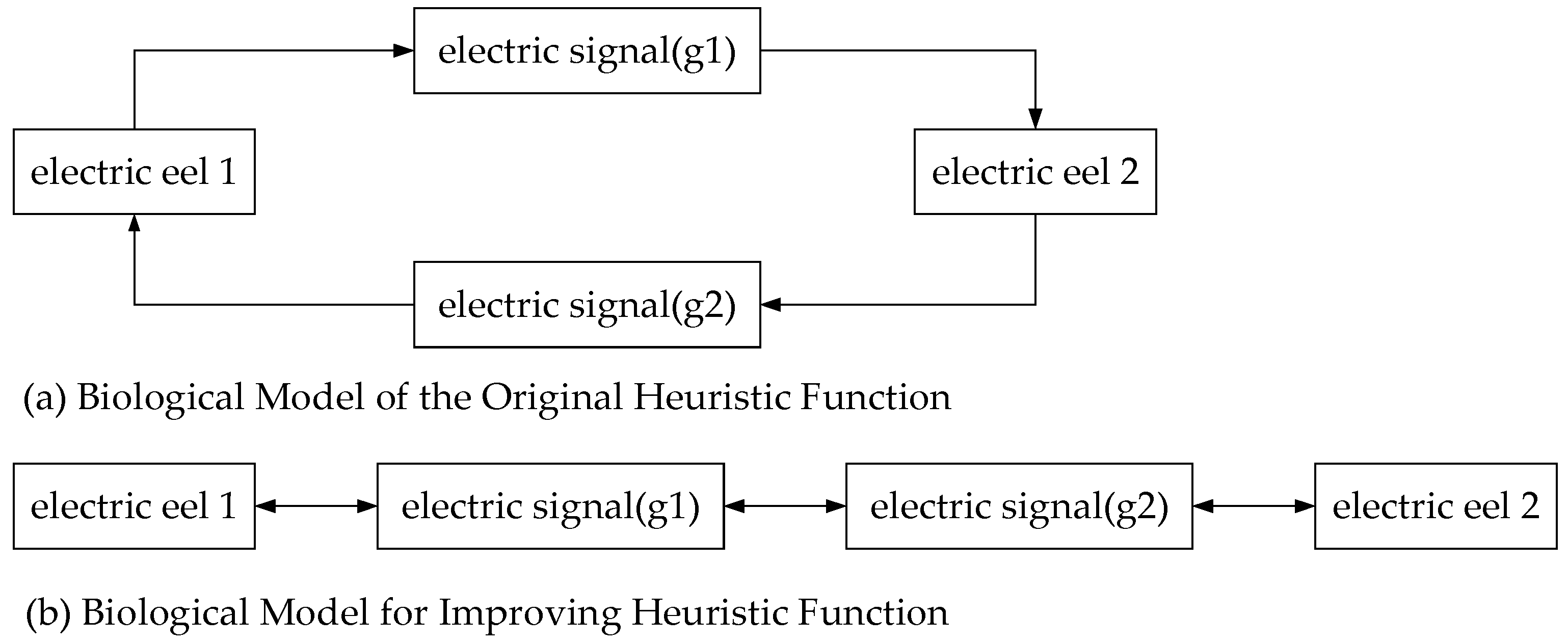
3.1. Improved Heuristic Function
3.2. Improved Jump Points Screening Strategy
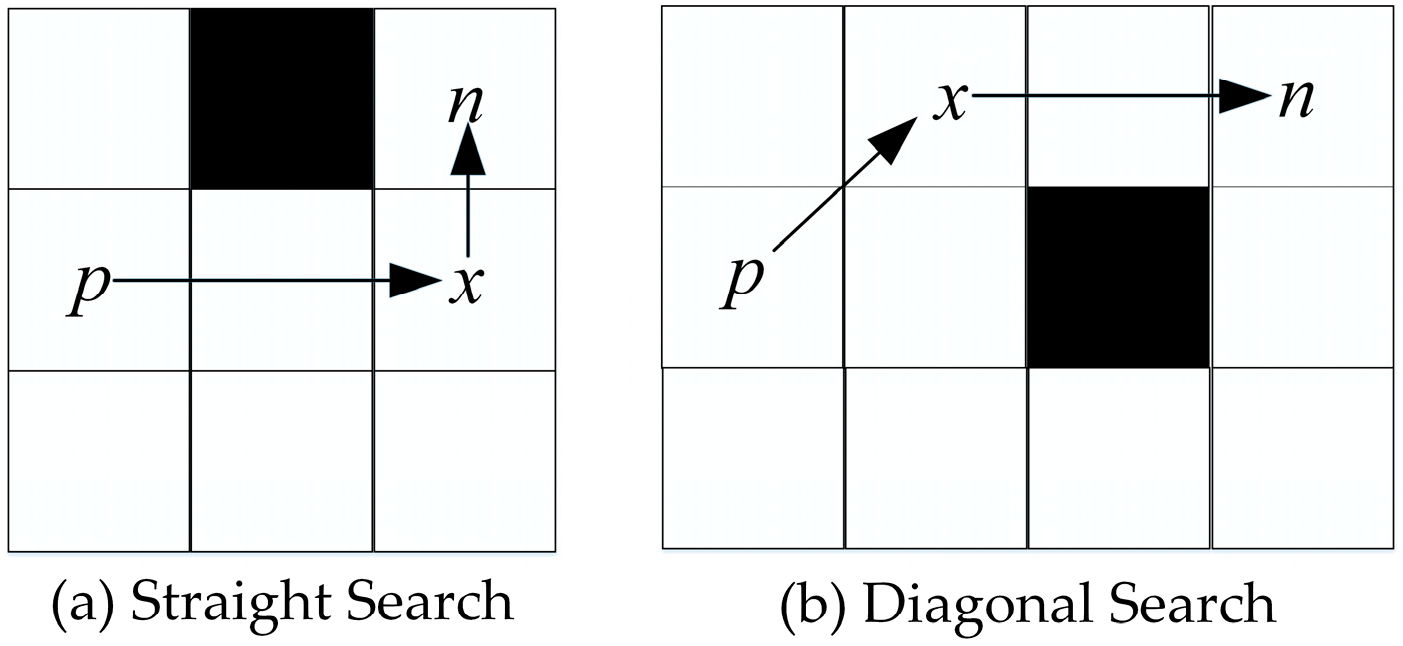
- (1)
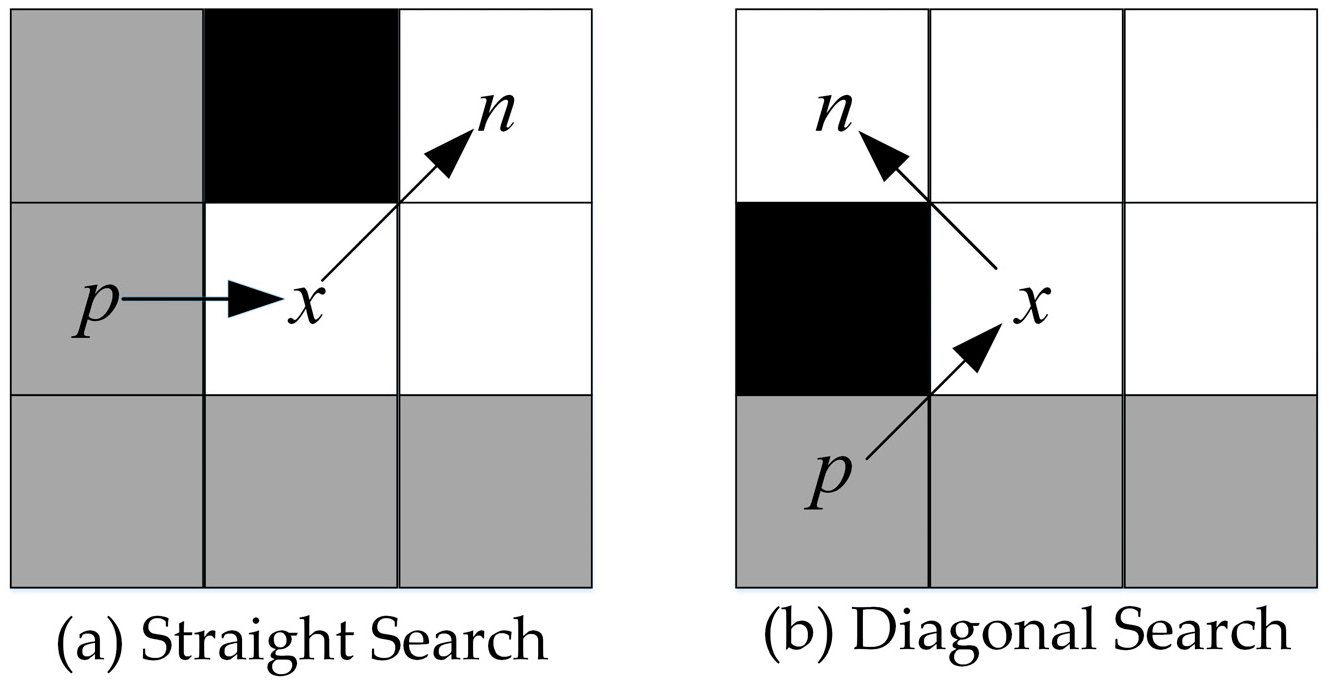
- In straight search, the JPS replaces jump points with inflection points. Inflection points refer to locations where two paths intersect horizontally and vertically, which is accompanied by obstacles. As shown in Figure 6a, node x represents an inflection point.
- (2)
- In diagonal search, if there is an inflection point in the intrinsic straight line direction of node x, node x is the jump point on the current search path.
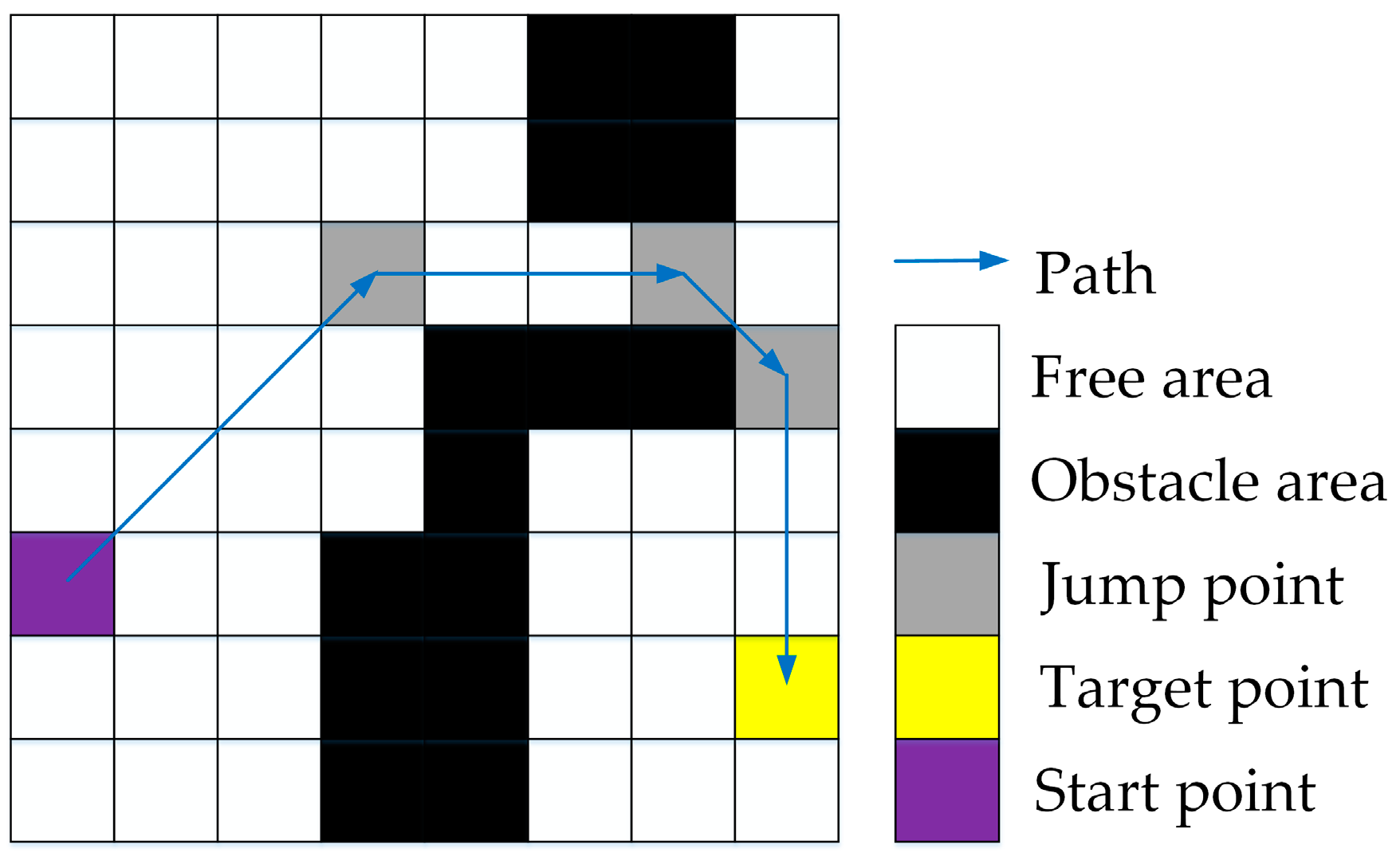
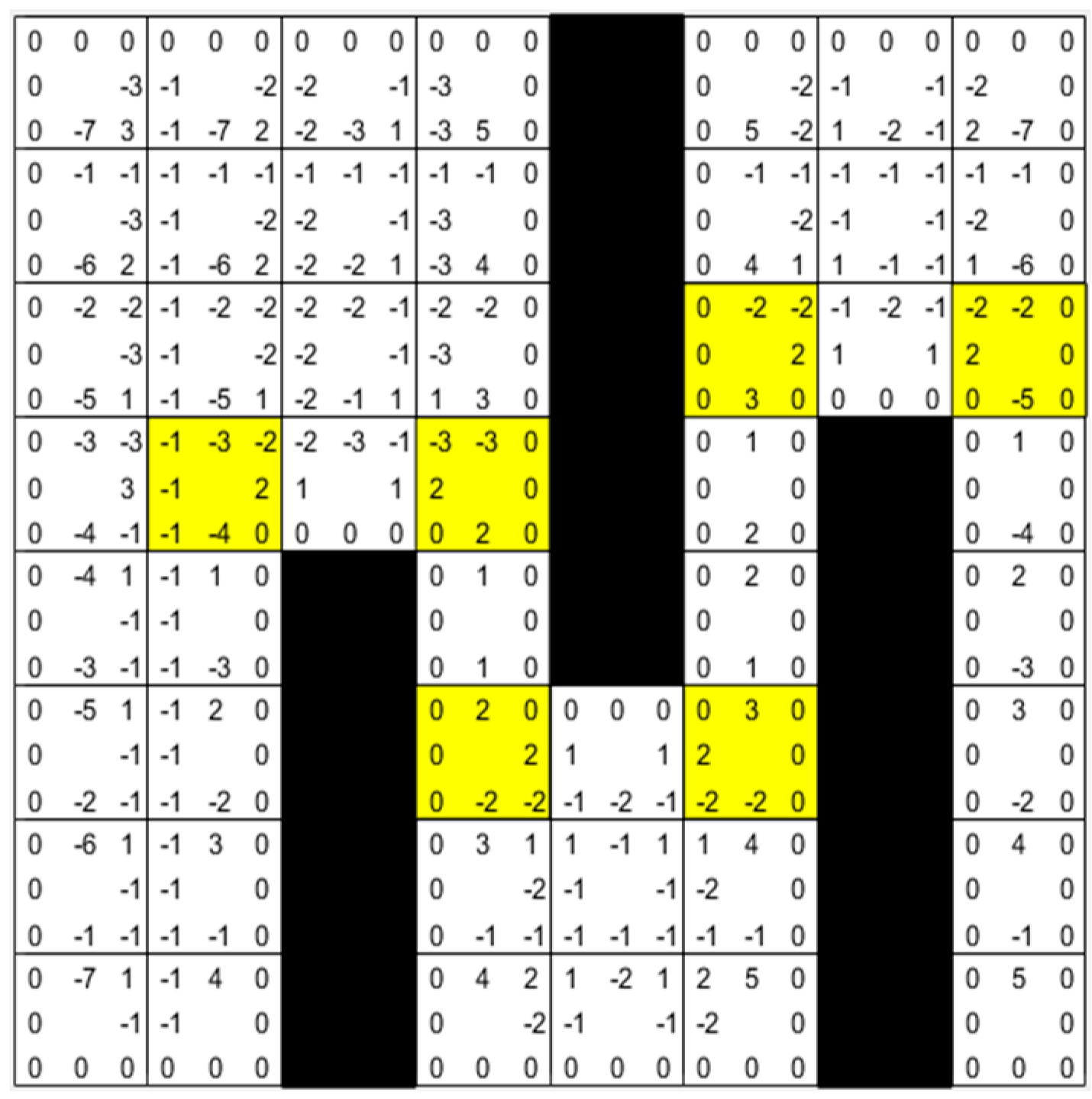
3.3. Map Preprocessing
- A positive number n indicates a jump point that moves n steps in that direction to reach the inflection point or to search diagonally.
- A negative number −n indicates that moving n + 1 steps in that direction will hit an obstacle or boundary.
- A value of 0 means that the obstacle or boundary is encountered after moving 1 step in that direction.
| Algorithm 1: Map Preprocessing | |
| Input: | grid map |
| Output: | map information data |
| 1 | Function map_preprocessing(map): |
| 2 | for free node n in map: |
| 3 | for direction do //One of eight standard directions |
| 4 | if reachable_jump_point then |
| 5 | n.direction = step; //Return the distance to the jump point |
| 6 | else if reachable_diagonal_special_point then |
| 7 | n.direction = step; //Return the distance to the diagonal special point |
| 8 | else |
| 9 | n.direction = -step; //Return the step to obstacle or map boundary |
| 10 | end if |
| 11 | end for |
| 12 | Processed_map←n; |
| 13 | end for |
| 14 | return Processed_map; |
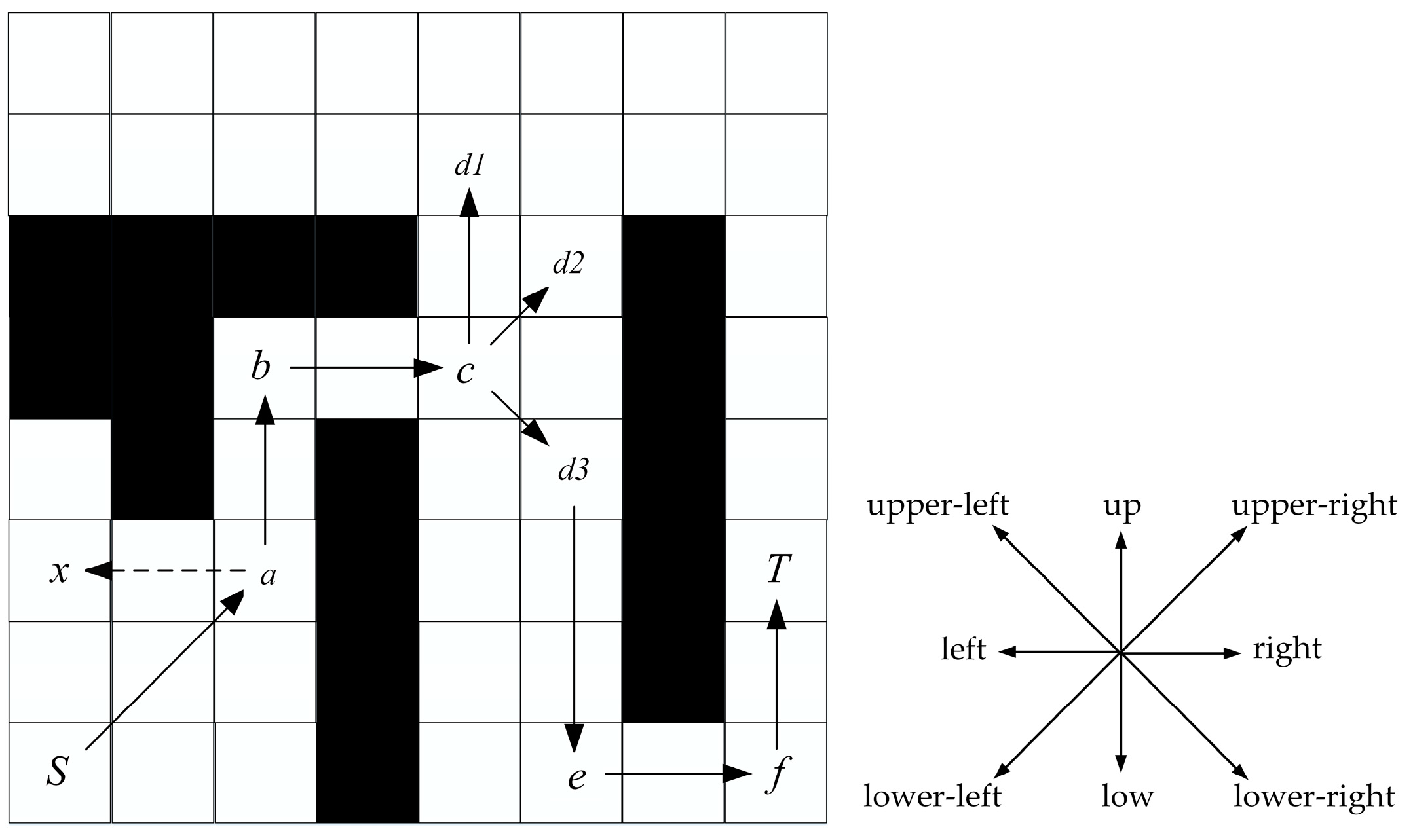
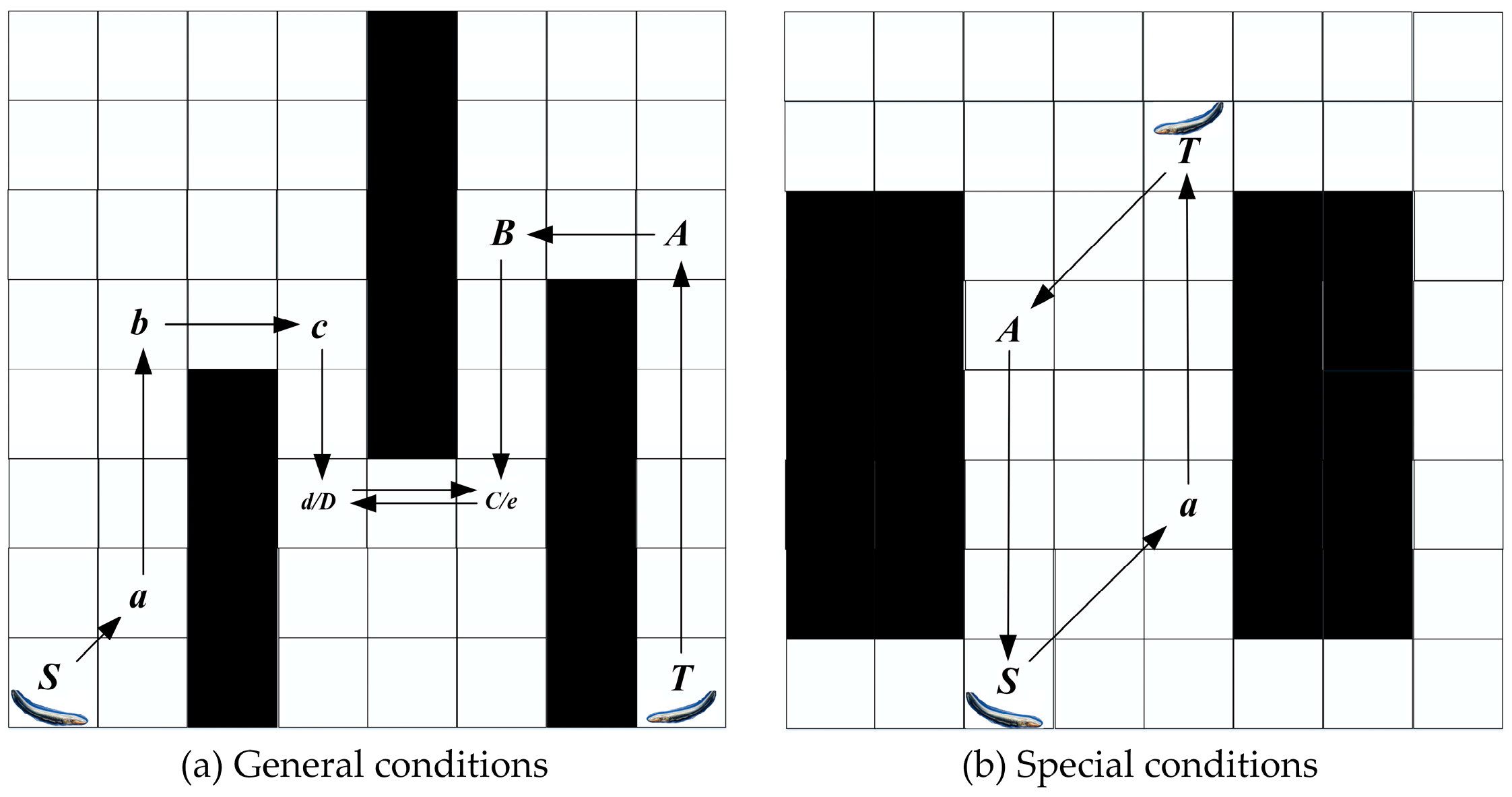
3.4. Improved Node Expansion
3.5. Bidirectional Path Search
| Algorithm 2: Bidirectional Path Search | |
| Input: | start node S, target node T, processed map |
| Output: | a set of path nodes |
| 1 | Function bidirectional_path_search (S, T, map): |
| 2 | open1←S; |
| 3 | open2←T; |
| 4 | n1←S; |
| 5 | n2←T; |
| 6 | while n1 not in closed2 or n2 not in closed1 do |
| 7 | n1←min_f in open1; //set current node; |
| 8 | n2←min_f in open2; //set current node; |
| 9 | open1.delete(n1); |
| 10 | open2.delete(n2); |
| 11 | closed1←n1; |
| 12 | closed2←n2; |
| 13 | if n is reachable jump point form n1 then //forward path finding |
| 14 | open1←{n}; //Expand node n based on preprocessed map |
| 15 | end if |
| 16 | if n is reachable jump point form n2 then //backward path finding |
| 17 | open2←{n}; //Expand node n based on preprocessed map |
| 18 | end if |
| 19 | end while |
| 20 | path←backtracking(closed1, closed2); |
| 21 | return path; |
3.6. Rewiring Strategy
| Algorithm 3: Rewiring Strategy | |
| Input: | path, map |
| Output: | optimized path |
| 1 | Function path_optimization (path, map): |
| 2 | path←delect_same_direction_point(path); //Update path |
| 3 | for i←1 to path.number-3 do |
| 4 | A.B.C.D.E←path(i): path(i + 4); |
| 5 | if AB||CD and then |
| 6 | N←chose_new_node(B, C, D); //BCDN is a parallelogram |
| 7 | if safe(BN, DN) then |
| 8 | if BC||DE then //case 1 |
| 9 | path.delect(B, C, D); |
| 10 | else //case 2: BC∩DE ≠ null |
| 11 | path.delect(B, C); |
| 12 | end if |
| 13 | path.insert(N); //Insert node N after node A |
| 14 | i←1; |
| 15 | end if |
| 16 | end if |
| 17 | end for //Complete the Parallelogram Strategy |
| 18 | path←path_discrete(path); //Update path |
| 19 | path←path_prune(path); //Update path |
| 20 | return path |
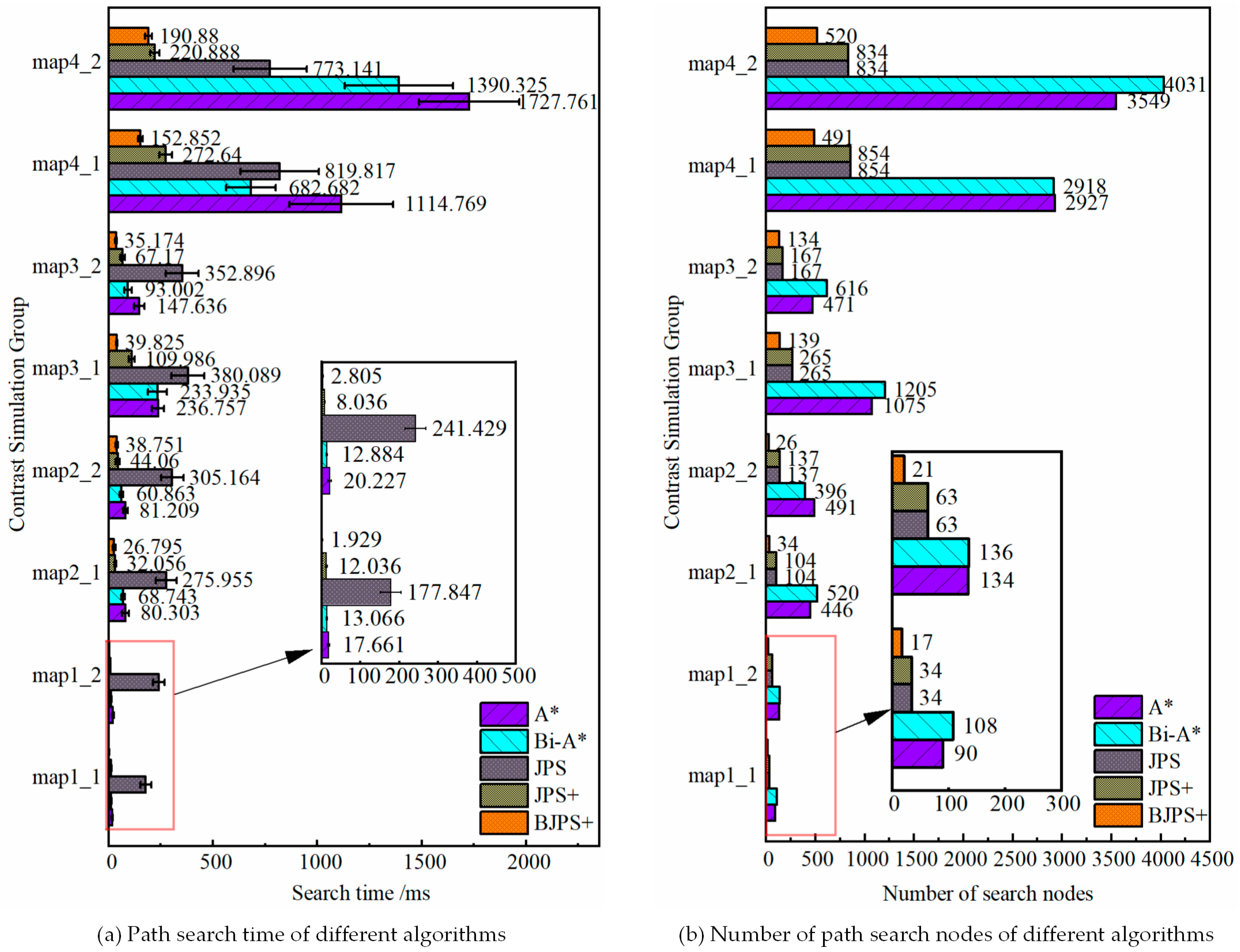
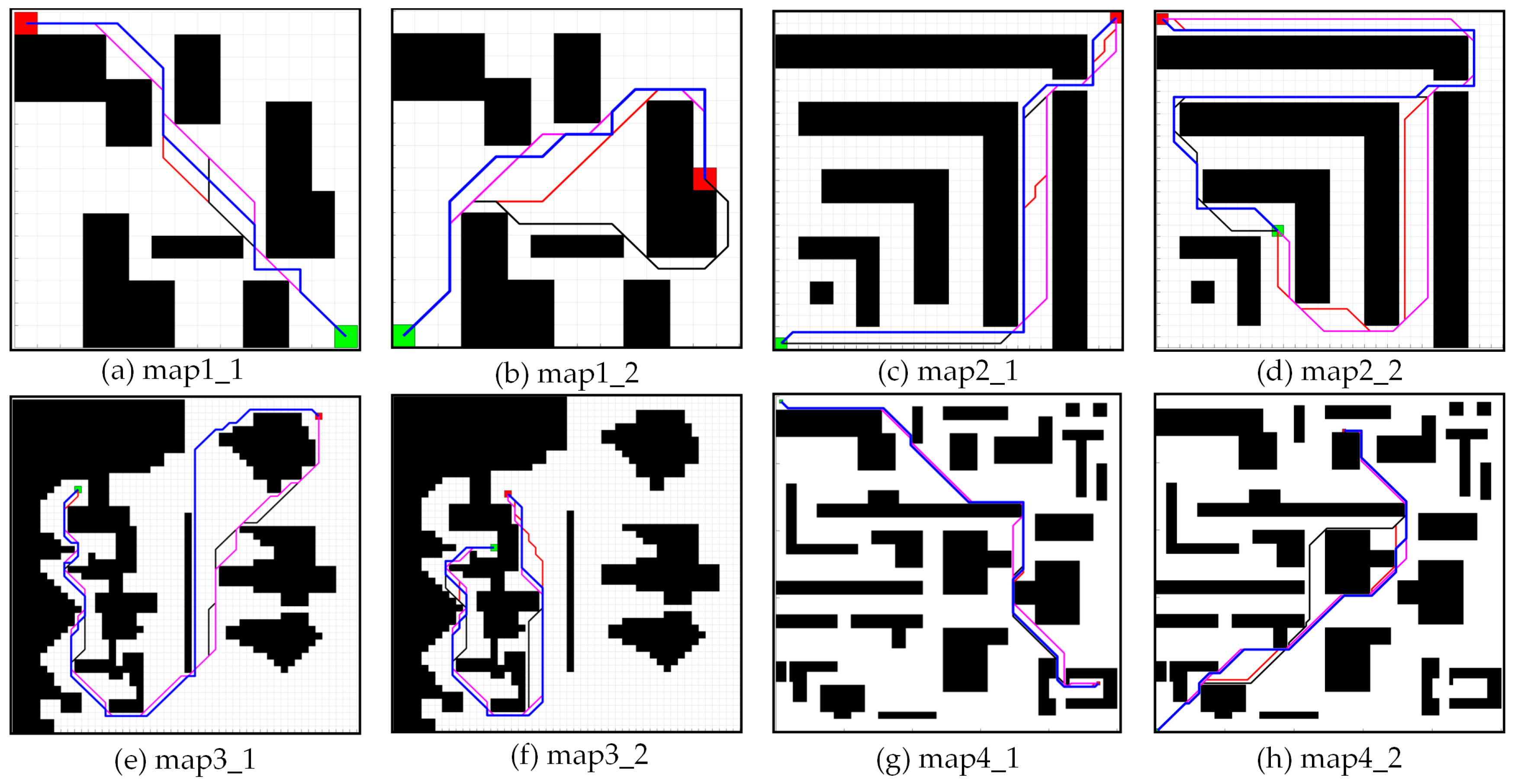
4. Simulation Studies and Discussion
4.1. Simulation of Different Algorithms
- (1)
- A* is a heuristic search-based path-planning algorithm that selects the optimal path by taking into account heuristic functions and actual costs. It has a wide range of applications and is used in many areas to solve the shortest path problems.
- (2)
- Bi-A* is an extension of the A* algorithm that simultaneously searches from both the start and end points to improve efficiency by simultaneously searching in both directions to find the shortest path.
- (3)
- JPS is an improvement of the A* algorithm. It accelerates the search process by skipping unrelated intermediate nodes and considering only important nodes (called “jump points”). It leverages the continuous nature of the map to jump through path extensions, reducing unnecessary node extensions and improving the search efficiency.
- (4)
- JPS+ is an improvement of the JPS algorithm. It includes preprocessing steps on the basis of the JPS algorithm to speed up the path search process by calculating and storing additional information beforehand. This preprocessing can be performed before the search, making the search process faster.
4.2. Simulation of Public Data Sets
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abd Algfoor, Z.; Sunar, M.S.; Abdullah, A. A new weighted pathfinding algorithms to reduce the search time on grid maps. Expert Syst. Appl. 2017, 71, 319–331. [Google Scholar] [CrossRef]
- Lin, S.; Liu, A.; Wang, J.; Kong, X. A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines 2022, 10, 773. [Google Scholar] [CrossRef]
- Pak, J.; Kim, J.; Park, Y.; Son, H.I. Field evaluation of path-planning algorithms for autonomous mobile robot in smart farms. IEEE Access 2022, 10, 60253–60266. [Google Scholar] [CrossRef]
- Berger, J.; Lo, N. An innovative multi-agent search-and-rescue path planning approach. Comput. Oper. Res. 2015, 53, 24–31. [Google Scholar] [CrossRef]
- Algfoor, Z.A.; Sunar, M.S.; Kolivand, H. A comprehensive study on pathfinding techniques for robotics and video games. Int. J. Comput. Games Technol. 2015, 2015, 736138. [Google Scholar] [CrossRef]
- Elfes, A. Sonar-based real-world mapping and navigation. IEEE J. Robot. Autom. 1987, 3, 249–265. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. In Edsger Wybe Dijkstra: His Life, Work, and Legacy; ACM: New York, NY, USA, 2022; pp. 287–290. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- LaValle, S.M. Rapidly-exploring random trees: A new tool for path planning. In Research Report 9811; Iowa State University: Ames, IA, USA, 1998. [Google Scholar]
- Stentz, A. Optimal and efficient path planning for partially-known environments. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; IEEE: Piscataway, NJ, USA, 1994; pp. 3310–3317. [Google Scholar]
- Dorigo, M. Optimization, Learning and Natural Algorithms. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 1992. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Harabor, D.; Grastien, A. Improving jump point search. In Proceedings of the International Conference on Automated Planning and Scheduling, Portsmouth, NH, USA, 21–26 June 2014; Volume 24, pp. 128–135. [Google Scholar]
- Ebendt, R.; Drechsler, R. Weighted A∗ search–unifying view and application. Artif. Intell. 2009, 173, 1310–1342. [Google Scholar] [CrossRef]
- Pohl, I. Heuristic search viewed as path finding in a graph. Artif. Intell. 1970, 1, 193–204. [Google Scholar] [CrossRef]
- Bulitko, V.; Lee, G. Learning in real-time search: A unifying framework. J. Artif. Intell. Res. 2006, 25, 119–157. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Liu, S.; Wang, J.; Wang, Y.; Shangguan, D. Path planning of scenic spots based on improved A* algorithm. Sci. Rep. 2022, 12, 1320. [Google Scholar] [CrossRef]
- Hagiwara, S.; Szabo, T.; Enger, P.S. Physiological properties of electroreceptors in the electric eel, Electrophorus electricus. J. Neurophysiol. 1965, 28, 775–783. [Google Scholar] [CrossRef]
- Catania, K.C. The astonishing behavior of electric eels. Front. Integr. Neurosci. 2019, 13, 23. [Google Scholar] [CrossRef]
- Sarkar, P.; Joshi, A. An Engineering Perspective on the Biomechanics and Bioelectricity of Fishes. J. Surv. Fish. Sci. 2023, 10, 2201–2219. [Google Scholar]
- Harabor, D.; Grastien, A. Online graph pruning for pathfinding on grid maps. Proc. AAAI Conf. Artif. Intell. 2011, 25, 1114–1119. [Google Scholar] [CrossRef]
- Harabor, D.; Grastien, A. The JPS pathfinding system. Proc. Int. Symp. Comb. Search 2012, 3, 207–208. [Google Scholar] [CrossRef]
- Nobes, T.K.; Harabor, D.; Wybrow, M.; Walsh, S.D. The jps pathfinding system in 3d. Proc. Int. Symp. Comb. Search 2022, 15, 145–152. [Google Scholar] [CrossRef]
- Su, Q.; Ma, S.; Wang, L.; Song, Y.; Wang, H.; Li, B.; Yang, Y. Artificial potential field guided JPS algorithm for fast optimal path planning in cluttered environments. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 602. [Google Scholar] [CrossRef]
- Huang, F.; Wei, J. Weighted Jump Point Search Algorithm in Ship Static Safe Path Finding. In Proceedings of the 2022 2nd International Conference on Consumer Electronics and Computer Engineering (ICCECE), Guangzhou, China, 14–16 January 2022; IEEE: Piscataway, NJ, USA; pp. 755–759. [Google Scholar]
- Moravec, H.; Elfes, A. High resolution maps from wide angle sonar. In Proceedings of the IEEE International Conference on Robotics and Automation, St. Louis, MI, USA, 25–28 March 1985; IEEE: Piscataway, NJ, USA; Volume 2, pp. 116–121. [Google Scholar]
- Zhang, J.; Wang, X.; Xu, L.; Zhang, X. An Occupancy Information Grid Model for Path Planning of Intelligent Robots. ISPRS Int. J. Geo-Inf. 2022, 11, 231. [Google Scholar] [CrossRef]
- Li, C.; Huang, X.; Ding, J.; Song, K.; Lu, S. Global path planning based on a bidirectional alternating search A* algorithm for mobile robots. Comput. Ind. Eng. 2022, 168, 108123. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Ou, Y.; Fan, Y.; Zhang, X.; Lin, Y.; Yang, W. Improved A* path planning method based on the grid map. Sensors 2022, 22, 6198. [Google Scholar] [CrossRef] [PubMed]
- Gore, R.; Reynolds, P.F. An exploration-based taxonomy for emergent behavior analysis in simulations. In Proceedings of the 2007 Winter Simulation Conference, Washington, DC, USA, 9–12 December 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Sturtevant, N.R. Benchmarks for grid-based pathfinding. IEEE Trans. Comput. Intell. AI Games 2012, 4, 144–148. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Map Sizes | Map Types | Simulation Groups | Start | Target |
|---|---|---|---|---|
| 15 × 15 | simple | map1_1 | (15, 1) | (1, 15) |
| map1_2 | (1, 1) | (14, 8) | ||
| 30 × 30 | promenade | map2_1 | (1, 1) | (30, 30) |
| map2_2 | (11, 11) | (1, 30) | ||
| 50 × 50 | complex | map3_1 | (10, 37) | (45, 48) |
| map3_2 | (15, 28) | (17, 36) | ||
| 100 × 100 | complex | map4_1 | (2, 99) | (95, 15) |
| map4_2 | (1, 1) | (55, 90) |
| Simulation Groups | Algorithm | Evaluation | map1_1 | map1_2 | map2_1 | map2_2 | map3_1 | map3_2 | map4_1 | map4_2 |
|---|---|---|---|---|---|---|---|---|---|---|
| Search time/ms | A* | Mean | 17.661 | 20.227 | 80.303 | 81.209 | 236.757 | 147.636 | 1114.769 | 1727.761 |
| Error margin | 1.432 | 1.757 | 7.218 | 4.465 | 13.039 | 10.794 | 108.897 | 105.054 | ||
| Bi-A* | Mean | 13.066 | 12.884 | 68.743 | 60.863 | 233.935 | 93.002 | 682.682 | 1390.325 | |
| Error margin | 0.927 | 0.717 | 3.474 | 3.571 | 20.420 | 7.622 | 51.807 | 113.319 | ||
| JPS | Mean | 177.847 | 241.429 | 275.955 | 305.164 | 380.089 | 352.896 | 819.817 | 773.141 | |
| Error margin | 11.449 | 11.869 | 21.608 | 23.582 | 34.621 | 34.247 | 81.846 | 76.790 | ||
| JPS+ | Mean | 12.036 | 8.036 | 32.056 | 44.06 | 109.986 | 67.17 | 272.64 | 220.888 | |
| Error margin | 0.891 | 0.579 | 1.925 | 3.963 | 6.035 | 5.227 | 13.230 | 9.794 | ||
| BJPS+ | Mean | 1.929 | 2.805 | 26.795 | 38.751 | 39.825 | 35.174 | 152.852 | 190.88 | |
| Error margin | 0.345 | 0.334 | 2.642 | 2.075 | 1.434 | 2.283 | 4.928 | 6.803 | ||
| Number of Search nodes | A* | / | 90 | 134 | 446 | 491 | 1075 | 471 | 2927 | 3549 |
| Bi-A* | / | 108 | 136 | 520 | 396 | 1205 | 616 | 2918 | 4031 | |
| JPS | / | 34 | 63 | 104 | 137 | 265 | 167 | 854 | 834 | |
| JPS+ | / | 34 | 63 | 104 | 137 | 265 | 167 | 854 | 834 | |
| BJPS+ | / | 17 | 21 | 34 | 26 | 136 | 134 | 491 | 520 | |
| Path length | A*,Bi-A* | / | 21.556 | 22.728 | 53.314 | 74.556 | 102.569 | 75.113 | 155.711 | 141.51 |
| JPS, JPS+ | / | 21.556 | 22.728 | 53.314 | 75.971 | 102.569 | 75.113 | 155.711 | 141.51 | |
| BJPS+ | / | 23.314 | 23.9 | 55.071 | 78.9 | 106.856 | 77.456 | 158.642 | 146.197 |
| Obstacles (%) | Algorithm | Search Time/ms | * (%) | Number of Search Nodes | * (%) | Path Length | * (%) | Map Preprocessing Time/s | * (%) |
|---|---|---|---|---|---|---|---|---|---|
| 5 | A* | 45.966 (0.572) | −71.78 | 360 | −66.94 | 70.117 | 7.84 | / | / |
| 5 | Bi-A* | 44.927 (2.371) | −71.13 | 356 | −66.57 | 70.117 | 7.84 | / | / |
| 5 | JPS | 55.940 (3.002) | −76.81 | 153 | −22.22 | 70.117 | 7.84 | / | / |
| 5 | JPS+ | 15.201 (1.666) | −14.67 | 153 | −22.22 | 70.117 | 7.84 | 9.798 | −97.07 |
| 5 | BJPS+ | 12.971 (1.806) | / | 119 | / | 75.614 | / | 0.287 | / |
| 10 | A* | 49.383 (0.859) | −39.40 | 488 | −50.00 | 70.864 | 11.25 | / | / |
| 10 | Bi-A* | 46.826 (3.783) | −36.09 | 485 | −49.69 | 70.864 | 11.25 | / | / |
| 10 | JPS | 86.280 (2.395) | −65.31 | 254 | −3.94 | 70.864 | 11.25 | / | / |
| 10 | JPS+ | 37.232 (1.519) | −19.62 | 254 | −3.94 | 70.864 | 11.25 | 8.264 | −97.12 |
| 10 | BJPS+ | 29.927 (2.085) | / | 244 | / | 78.835 | / | 0.238 | / |
| 20 | A* | 77.826 (1.615) | −7.04 | 684 | −39.33 | 73.008 | 12.95 | / | / |
| 20 | Bi-A* | 78.832 (3.919) | −8.23 | 747 | −44.44 | 73.008 | 12.95 | / | / |
| 20 | JPS | 196.747 (3.889) | −63.23 | 446 | −6.95 | 73.008 | 12.95 | / | / |
| 20 | JPS+ | 87.594 (2.548) | −17.41 | 446 | −6.95 | 73.008 | 12.95 | 5.354 | −96.25 |
| 20 | BJPS+ | 72.348 (1.755) | / | 415 | / | 82.464 | / | 0.201 | / |
| 30 | A* | 97.593 (2.118) | −11.96 | 779 | −36.33 | 75.914 | 11.29 | / | / |
| 30 | Bi-A* | 95.360 (3.757) | −9.90 | 741 | −33.06 | 75.914 | 11.29 | / | / |
| 30 | JPS | 229.829 (4.857) | −62.62 | 517 | −4.06 | 75.914 | 11.29 | / | / |
| 30 | JPS+ | 89.223 (2.145) | −3.71 | 517 | −4.06 | 75.914 | 11.29 | 3.758 | −95.32 |
| 30 | BJPS+ | 85.917 (1.432) | / | 496 | / | 84.481 | / | 0.176 | / |
| 40 | A* | 64.435 (1.535) | −4.31 | 800 | −50.00 | 82.560 | 12.61 | / | / |
| 40 | Bi-A* | 107.793 (3.154) | −42.80 | 680 | −41.18 | 82.560 | 12.61 | / | / |
| 40 | JPS | 219.032 (4.471) | −71.85 | 478 | −16.32 | 82.560 | 12.61 | / | / |
| 40 | JPS+ | 78.156 (1.333) | −21.11 | 478 | −16.32 | 82.560 | 12.61 | 2.691 | −94.35 |
| 40 | BJPS+ | 61.656 (1.098) | / | 400 | / | 92.968 | / | 0.152 | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, H.; Tan, X.; Wu, Q.; Li, J.; Chu, Y.; Jiang, A.; Han, H.; Zhang, K. Bidirectional Jump Point Search Path-Planning Algorithm Based on Electricity-Guided Navigation Behavior of Electric Eels and Map Preprocessing. Biomimetics 2023, 8, 387. https://doi.org/10.3390/biomimetics8050387
Gong H, Tan X, Wu Q, Li J, Chu Y, Jiang A, Han H, Zhang K. Bidirectional Jump Point Search Path-Planning Algorithm Based on Electricity-Guided Navigation Behavior of Electric Eels and Map Preprocessing. Biomimetics. 2023; 8(5):387. https://doi.org/10.3390/biomimetics8050387
Chicago/Turabian StyleGong, Hao, Xiangquan Tan, Qingwen Wu, Jiaxin Li, Yongzhi Chu, Aimin Jiang, Hasiaoqier Han, and Kai Zhang. 2023. "Bidirectional Jump Point Search Path-Planning Algorithm Based on Electricity-Guided Navigation Behavior of Electric Eels and Map Preprocessing" Biomimetics 8, no. 5: 387. https://doi.org/10.3390/biomimetics8050387