



Fault Diagnosis in Analog Circuits Using Swarm Intelligence

 , and
, and
Abstract
:1. Introduction
- In the transformation-based approach, the model of the tested circuit is formulated, and the wavelet transform is applied to both fault-free and faulty circuit signals. A fault dictionary is constructed by extracting the standard deviation of the coefficients. The knowledge, along with the change in faulty parameters, is compared based on the fault dictionary to detect faults in the circuits [7].
- The optimization-based approach uses optimization algorithms to identify the component parameters. Nonlinear equations representing the tested circuit are considered as the optimization objective functions, and many optimization algorithms adapted for fault diagnosis techniques have been developed for fault detection in circuits. Fault detection is performed by comparing the estimated parameter with the reference values [8,9].
- The machine learning-based approach exploits the knowledge from previous successful and/or unsuccessful diagnoses to improve the performance of the system in diagnostic procedures. In this case, the response of the circuit under test, with the component parameter value in the circuit without any excitation, is recorded and used as a pattern to train the exploited neural network. The variation of the parameter in the component, after the excitation, is tested using the neural network, which should allow revealing the faulty components of the circuit [1]. These kinds of models for circuit fault diagnostic are not perfect. Their faithfulness is measured by the delivered accuracy rates, achieved during the diagnostic process.
- Hybrid approaches are those that incorporate both machine learning-based and rule-based techniques for fault diagnosis in circuits [12].
2. Related Works
2.1. Circuit Analysis-Based Approach
2.2. Classification-Based Approach
2.3. Optimization-Based Approach
3. Analog Circuit Analysis
- Select a reference node (ground node, 0 V). In the remaining nodes, assign variables , , …, . The voltage equations will have the chosen reference node as the reference.
- Apply Kirchhoff’s laws at each of the non-reference nodes. Use Ohm’s law to express branch currents in terms of node voltages.
- Solve the resulting equations to obtain the node voltage with respect to the reference node.
- Assign mesh currents , , …, to the n meshes.
- Apply Kirchhoff’s voltage law to each of the n meshes. Use Ohm’s law to express voltages in terms of mesh currents.
- Solve the resulting equations to obtain the mesh currents.
4. Case Studies
4.1. Case Study 1: Tow–Thomas Biquad Filter
4.2. Case Study 2: Butterworth Filter
5. Proposed Optimization Model for Fault Circuit Diagnostics
5.1. Application to Case Study 1
5.2. Application to Case Study 2
6. Swarm Intelligence-Based Search Strategies
6.1. Particle Swarm-Based Technique
| Algorithm 1 PSO’s main steps |
|
6.2. Bat Echolocation-Based Technique
| Algorithm 2 BA’s main steps |
|
7. Performance Evaluation
7.1. Evaluation Methodology
7.2. Evaluation Metrics
- Accuracy is a measure to quantify the level of agreement between an expected value and the number of correct outcomes obtained. It is defined by Equation (53):
- Precision measures the closeness between the obtained values through the repetition of the evaluation process. It is defined by Equation (54):
- Sensitivity, also known as recall, measures the ratio of correct positive predictions to the total number of positive instances. It is defined by Equation (55):
- Specificity measures the ratio of cases correctly classified as negative to the total number of cases without faults in a specific component different from the one being analyzed. It is defined by Equation (56):
7.3. PSO’s Performance Results
7.3.1. First Case Study
7.3.2. Second Case Study
7.4. BA’s Performance Results
7.4.1. First Case Study
7.4.2. Second Case Study
7.5. Performance Comparison: PSO vs. BA
7.6. Performance Comparison: Optimization vs. Classification
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Binu, D.; Kariyappa, B. A survey on fault diagnosis of analog circuits: Taxonomy and state of the art. AEU—Int. J. Electron. Commun. 2017, 73, 68–83. [Google Scholar] [CrossRef]
- van Schrick, D. Remarks on Terminology in the Field of Supervision, Fault Detection and Diagnosis. IFAC Proc. Vol. 1997, 30, 959–964. [Google Scholar] [CrossRef]
- Ding, S.X. Model-Based Fault Diagnosis Techniques: Design Schemes, Algorithms, and Tools; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Albustani, H. Modelling Methods for Testability Analysis of Analog Integrated Circuits Based on Pole-Zero Analysis. Ph.D. Thesis, Universität Duisburg-Essen, Essen, Germany, 2004. [Google Scholar]
- Claasen, T. System on a chip: Changing IC design today and in the future. IEEE Micro 2003, 23, 20–26. [Google Scholar] [CrossRef]
- Fenton, W.; McGinnity, T.; Maguire, L. Fault diagnosis of electronic systems using intelligent techniques: A review. IEEE Trans. Syst. Man Cybern. Part C 2001, 31, 269–281. [Google Scholar] [CrossRef]
- Deng, Y.; Shi, Y.; Zhou, L. An approach of fault diagnosis in nonlinear circuits. In Proceedings of the 2010 International Conference on Communications, Circuits and Systems (ICCCAS), Chengdu, China, 28–30 July 2010; pp. 796–799. [Google Scholar]
- Korzybski, M.; Ossowski, M. The On-line Evolutionary Method for Soft Fault Diagnosis in Diode-transistor Circuits. Int. J. Electron. Telecommun. 2015, 61, 109–115. [Google Scholar] [CrossRef]
- Luo, H.; Wang, Y.; Lin, H.; Jiang, Y. Module level fault diagnosis for analog circuits based on system identification and genetic algorithm. Measurement 2012, 45, 769–777. [Google Scholar] [CrossRef]
- Catelani, M.; Fort, A.; Alippi, C. A fuzzy approach for soft fault detection in analog circuits. Measurement 2002, 32, 73–83. [Google Scholar] [CrossRef]
- Kavithamani, A.; Manikandan, V.; Devarajan, N. Analog circuit fault diagnosis based on bandwidth and fuzzy classifier. In Proceedings of the TENCON 2009—2009 IEEE Region 10 Conference, Singapore, 23–26 January 2009; pp. 1–6. [Google Scholar]
- Qin, X.; Han, B.; Cui, L. A kind integrated adaptive fuzzy neural network tolerance analog circuit fault diagnosis method. In Proceedings of the 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering, Wuhan, China, 20–21 August 2011; Volume 1, pp. 180–183. [Google Scholar]
- Yu, W.E.S.; Paluga, F.D. Practical Treatise on the Tow-Thomas Biquad Active Filter. Structure 2002, 2. [Google Scholar]
- Butterworth, S. On the Theory of Filter Amplifiers. Exp. Wirel. Wirel. Eng. 1930, 7, 536–541. [Google Scholar]
- Vasan, A.S.S.; Long, B.; Pecht, M. Diagnostics and Prognostics Method for Analog Electronic Circuits. IEEE Trans. Ind. Electron. 2013, 60, 5277–5291. [Google Scholar] [CrossRef]
- Tadeusiewicz, M.; Korzybski, M. A method for fault diagnosis in linear electronic circuits. Int. J. Circuit Theory Appl. 2000, 28, 245–262. [Google Scholar] [CrossRef]
- Tadeusiewicz, M.; Halgas, S.; Korzybski, M. An algorithm for soft-fault diagnosis of linear and nonlinear circuits. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 49, 1648–1653. [Google Scholar] [CrossRef]
- Bhattacharya, R.; Ragamai, S.H.M.; Kumar, S. SFG Based Fault Simulation of Linear Analog Circuits Using Fault Classification and Sensitivity Analysis; Springer: Berlin/Heidelberg, Germany, 2017; pp. 179–190. [Google Scholar]
- Tadeusiewicz, M.; Halgas, S. Soft fault diagnosis of linear circuits with the special attention paid to the circuits containing current conveyors. AEU—Int. J. Electron. Commun. 2020, 115, 1530–1536. [Google Scholar] [CrossRef]
- Aizenberg, I.; Belardi, R.; Bindi, M.; Grasso, F.; Manetti, S.; Luchetta, A.; Piccirilli, M.C. A Neural Network Classifier with Multi-Valued Neurons for Analog Circuit Fault Diagnosis. Electronics 2021, 10, 349. [Google Scholar] [CrossRef]
- Shi, J.; Deng, Y.; Wang, Z.; He, Q. A Combined Method for Analog Circuit Fault Diagnosis Based on Dependence Matrices and Intelligent Classifiers. IEEE Trans. Instrum. Meas. 2020, 69, 782–793. [Google Scholar] [CrossRef]
- Shi, J.; Deng, Y.; Wang, Z.; Guo, X. An adaptive new state recognition method based on density peak clustering and voting probabilistic neural network. Appl. Soft Comput. 2020, 97, 106835. [Google Scholar] [CrossRef]
- Deng, Y.; Zhou, Y. Fault Diagnosis of an Analog Circuit Based on Hierarchical DVS. Symmetry 2020, 12, 1901. [Google Scholar] [CrossRef]
- Shi, J.; He, Q.; Wang, Z. GMM Clustering-Based Decision Trees Considering Fault Rate and Cluster Validity for Analog Circuit Fault Diagnosis. IEEE Access 2019, 7, 140637–140650. [Google Scholar] [CrossRef]
- Karthi, S.P.; Shanthi, M.; Bhuvaneswari, M.C. Parametric fault diagnosis in analog circuit using genetic algorithm. In Proceedings of the 2014 International Conference on Green Computing Communication and Electrical Engineering, Coimbatore, India, 6–8 March 2014; pp. 1–5. [Google Scholar]
- Yu, W.; He, Y.; Gao, K. A Compute Method of Analog Circuit Fault Diagnosis via Particle Swarm Optimization. J. Autom. Control. Eng. 2016, 4, 439–442. [Google Scholar] [CrossRef]
- Yang, C.; Zhen, L.; Hu, C. Fault Diagnosis of Analog Filter Circuit Based on Genetic Algorithm. IEEE Access 2019, 7, 54969–54980. [Google Scholar] [CrossRef]
- Yang, C. Genetic Algorithm Based Faulty Parameter Identification for Linear Analog Circuit. IEEE Access 2020, 8, 213357–213369. [Google Scholar] [CrossRef]
- Alexander, C.; Sadiku, M. Fundamentals of Electric Circuits, 7th ed.; McGraw Hill Higher Education: New York, NY, USA, 2008. [Google Scholar]
- Hayt, W.; Kermmerly, J.; Durbin, S. Análise de Circuitos em Engenharia; Mc Graw Hill: New York, NY, USA, 2008. [Google Scholar]
- Lee, S.Y.; Cheng, C.J. Systematic Design and Modeling of a OTA-C Filter for Portable ECG Detection. IEEE Trans. Biomed. Circuits Syst. 2009, 3, 53–64. [Google Scholar] [CrossRef]
- Yang, X.S. A New Metaheuristic Bat-Inspired Algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); Springer: Berlin/Heidelberg, Germany, 2010; pp. 65–74. [Google Scholar]
- Galindo, J.D.L. Diagnóstico de Falhas em Circuitos Analó gicos Utilizando Inteligência de Enxame. Master’s Thesis, Universidade do Estado do Rio de Janeiro, State University of Rio de Janeiro, Rio de Janeiro, Brazil, 2022. Available online: https://www.pel.uerj.br/wp-content/uploads/2023/04/Dissertacao_Jalber_Dinelli.pdf (accessed on 22 August 2023).
- Pervez, Z.; Sun, J.; Hu, G.; Wang, C. Analog Circuit Soft Fault Diagnosis Based on Sparse Random Projections and K-Nearest Neighbor. Sci. Program. 2021, 2021, 8040140. [Google Scholar] [CrossRef]
- Yang, H.; Xu, Z.; Ye, J.; King, I.; Lyu, M.R. Efficient sparse generalized multiple kernel learning. IEEE Trans Neural Netw. 2011, 22, 433–446. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; He, Y.; Yuan, L.; He, W.; Xiang, S.; Li, Z. novel approach for diagnosis of analog circuit fault by using GMKL-SVM and PSO. J. Electron. Test. 2016, 32, 531–540. [Google Scholar] [CrossRef]
- Ma, Q.; He, Y.; Zhou, F. A new decision tree approach of support vector machine for analog circuit fault diagnosis. Analog. Integr. Circ. Signal Process. 2016, 88, 455–463. [Google Scholar] [CrossRef]
- Shokrolahi, S.; Kazempour, A.T.N. A novel approach for fault detection of analog circuit by using improved EEMD. Analog. Integr. Circ. Signal Process. 2019, 98, 527–534. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenarios | Fault | Value | (V) | (V) | (V) |
|---|---|---|---|---|---|
| Case 1 | NF | - | |||
| Case 2 | |||||
| Case 3 | |||||
| Case 4 | |||||
| Case 5 | |||||
| Case 6 | |||||
| Case 7 | |||||
| Case 8 | |||||
| Case 9 |
| #Nodes | Node Combinations |
|---|---|
| 1 | , , |
| 2 | , , |
| 3 |
| Scenarios | Fault | Value | (V) | (V) | (V) | (V) | (V) |
|---|---|---|---|---|---|---|---|
| Case 1 | NF | ||||||
| Case 2 | |||||||
| Case 3 | |||||||
| Case 4 | |||||||
| Case 5 | |||||||
| Case 6 | |||||||
| Case 7 | |||||||
| Case 8 | |||||||
| Case 9 | |||||||
| Case 10 | |||||||
| Case 11 |
| #Nodes | Node Combinations |
|---|---|
| 1 | , , , , |
| 2 | , , , , , , , , , |
| 3 | , , , , , , , , , |
| 4 | , , , , |
| 5 |
| Parameter | Value |
|---|---|
| #Dimensions | K |
| #Iterations | 1000 |
| #Particles | 30 |
| 0.5 | |
| 1.49 | |
| 1.49 | |
| 0.0 | |
| Error |
| Metric (%) | |||||||
|---|---|---|---|---|---|---|---|
| A | 90.99 | 91.30 | 91.26 | 92.69 | 92.58 | 92.81 | 93.90 |
| P | 59.38 | 60.70 | 60.55 | 67.34 | 66.80 | 67.81 | 72.84 |
| R | 62.89 | 63.78 | 63.96 | 69.56 | 69.54 | 70.32 | 74.60 |
| S | 94.91 | 95.09 | 95.07 | 95.87 | 95.81 | 95.95 | 96.56 |
| Metric (%) | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 91.25 | 91.63 | 91.87 | 91.90 | 91.97 | 91.77 | 92.71 | 92.76 | 92.50 | 93.37 | 93.45 | 93.13 | 92.75 | 93.22 | 92.50 |
| P | 55.46 | 58.04 | 58.41 | 58.76 | 58.78 | 59.20 | 62.20 | 62.48 | 61.18 | 65.97 | 66.11 | 64.40 | 62.76 | 64.62 | 61.37 |
| R | 55.06 | 56.76 | 56.76 | 57.02 | 57.55 | 57.66 | 61.20 | 61.73 | 60.20 | 65.00 | 65.43 | 63.51 | 61.46 | 64.18 | 60.54 |
| S | 95.31 | 95.67 | 95.65 | 95.69 | 95.69 | 95.74 | 96.07 | 96.10 | 95.96 | 96.43 | 96.46 | 96.29 | 96.13 | 96.32 | 95.96 |
| Metric (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| A | 93.40 | 93.50 | 93.21 | 93.41 | 93.33 | 93.16 | 93.40 | 93.41 | 93.58 | 93.28 |
| P | 66.16 | 66.24 | 65.09 | 65.86 | 65.41 | 64.57 | 65.71 | 65.65 | 66.82 | 65.24 |
| R | 65.19 | 65.91 | 64.02 | 64.85 | 64.29 | 63.84 | 65.12 | 65.09 | 65.83 | 64.44 |
| S | 96.44 | 96.46 | 96.35 | 96.47 | 96.41 | 96.32 | 96.40 | 96.40 | 96.54 | 96.39 |
| Metric (%) | ||||||
|---|---|---|---|---|---|---|
| A | 93.97 | 93.71 | 93.63 | 93.69 | 93.08 | 94.07 |
| P | 68.81 | 67.29 | 66.88 | 67.23 | 63.84 | 69.11 |
| R | 67.96 | 66.52 | 66.32 | 66.41 | 63.59 | 68.28 |
| S | 96.73 | 96.59 | 96.55 | 96.61 | 96.20 | 96.79 |
| Parameter | Value |
|---|---|
| #Dimensions | K |
| #Iterations | 1000 |
| #Bats | 30 |
| Alfa | 0.5 |
| Beta | 0.5 |
| Initial pulse rate | 0.1 |
| 0 Hz | |
| 500 kHz |
| Metric (%) | |||||||
|---|---|---|---|---|---|---|---|
| A | 92.14 | 92.41 | 92.59 | 93.98 | 94.08 | 94.59 | 95.84 |
| P | 64.51 | 65.81 | 66.57 | 73.00 | 73.45 | 75.74 | 81.45 |
| R | 67.19 | 68.19 | 68.94 | 74.51 | 75.04 | 77.07 | 82.16 |
| S | 95.57 | 95.72 | 95.83 | 96.60 | 96.67 | 96.95 | 97.66 |
| Metric (%) | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 91.25 | 91.63 | 92.81 | 92.97 | 93.10 | 91.77 | 92.71 | 92.76 | 92.50 | 93.37 | 93.45 | 93.13 | 93.70 | 93.85 | 93.98 |
| P | 55.46 | 58.04 | 63.43 | 64.18 | 64.73 | 59.20 | 62.20 | 62.48 | 61.18 | 65.97 | 66.11 | 64.40 | 67.78 | 68.25 | 69.10 |
| R | 55.06 | 56.76 | 61.19 | 61.97 | 62.65 | 57.66 | 61.20 | 61.73 | 60.20 | 65.00 | 65.43 | 63.51 | 65.77 | 66.77 | 67.32 |
| S | 95.31 | 95.67 | 96.20 | 96.29 | 96.35 | 95.74 | 96.07 | 96.10 | 95.96 | 96.43 | 96.46 | 96.29 | 96.68 | 96.72 | 96.81 |
| Metric (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| A | 93.40 | 93.50 | 93.21 | 93.41 | 93.33 | 94.41 | 93.40 | 93.41 | 94.46 | 94.52 |
| P | 66.16 | 66.24 | 65.09 | 65.86 | 65.41 | 71.21 | 65.71 | 65.65 | 71.51 | 71.74 |
| R | 65.19 | 65.91 | 64.02 | 64.85 | 64.29 | 69.61 | 65.12 | 65.09 | 69.86 | 70.32 |
| S | 96.44 | 96.46 | 96.35 | 96.47 | 96.41 | 97.03 | 96.40 | 96.40 | 97.06 | 97.08 |
| Metric (%) | ||||||
|---|---|---|---|---|---|---|
| A | 93.97 | 93.71 | 93.63 | 95.13 | 95.33 | 95.90 |
| P | 68.81 | 67.29 | 66.88 | 74.87 | 75.57 | 78.44 |
| R | 67.96 | 66.52 | 66.32 | 73.30 | 74.60 | 77.64 |
| S | 96.73 | 96.59 | 96.55 | 97.42 | 97.49 | 97.79 |
| #Nodes | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Metrics (%) | 1 | 2 | 3 | 4 | 5 | ||||||
| PSO | BA | PSO | BA | PSO | BA | PSO | BA | PSO | BA | ||
| Circuit 1 | A | 91.18 | 92.38 | 92.69 | 94.22 | 93.90 | 95.84 | - | - | - | - |
| P | 60.21 | 65.63 | 67.32 | 74.06 | 72.84 | 81.45 | - | - | - | - | |
| S | 63.54 | 68.11 | 69.80 | 75.54 | 74.60 | 82.16 | - | - | - | - | |
| E | 95.02 | 95.71 | 95.88 | 96.74 | 96.56 | 97.66 | - | - | - | - | |
| Circuit 2 | A | 91.72 | 92.35 | 92.81 | 93.12 | 93.37 | 93.71 | 93.62 | 94.35 | 94.07 | 95.90 |
| P | 57.89 | 61.17 | 63.03 | 64.67 | 65.68 | 67.46 | 66.81 | 70.68 | 69.11 | 78.44 | |
| S | 56.63 | 59.53 | 62.09 | 63.46 | 64.86 | 66.43 | 66.16 | 69.74 | 68.28 | 77.64 | |
| E | 95.60 | 95.96 | 96.15 | 96.33 | 96.42 | 96.61 | 96.54 | 96.96 | 96.79 | 97.79 | |
| #Nodes | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Improvement (%) | 2 | 3 | 4 | 5 | |||||
| PSO | BA | PSO | BA | PSO | BA | PSO | BA | ||
| Circuit 1 | A | 1.51 | 1.84 | 2.72 | 3.46 | - | - | - | - |
| P | 7.11 | 8.43 | 12.63 | 15.82 | - | - | - | - | |
| R | 6.26 | 7.43 | 11.06 | 14.05 | - | - | - | - | |
| S | 0.86 | 1.03 | 1.54 | 1.95 | - | - | - | - | |
| Circuit 2 | A | 1.09 | 0.77 | 1.65 | 1.36 | 1.90 | 2.00 | 2.35 | 3.55 |
| P | 5.14 | 3.50 | 7.79 | 6.29 | 8.92 | 9.51 | 11.22 | 17.27 | |
| R | 5.46 | 3.93 | 8.23 | 6.90 | 9.53 | 10.21 | 11.65 | 18.11 | |
| S | 0.55 | 0.37 | 0.82 | 0.65 | 0.94 | 1.00 | 1.19 | 1.83 | |
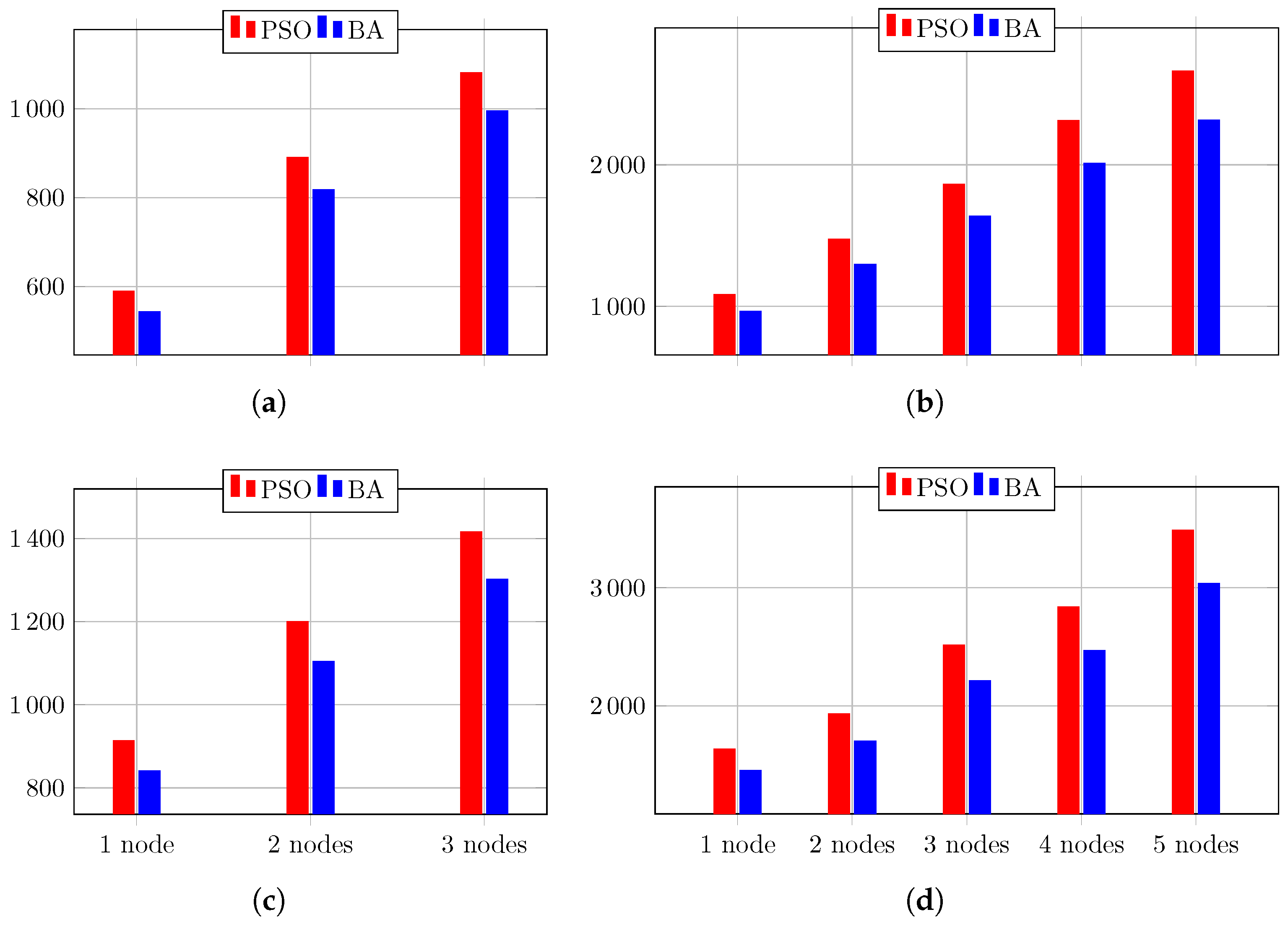
| #Nodes | Time (s) | |||||||
|---|---|---|---|---|---|---|---|---|
| Circuit 1 | Circuit 2 | |||||||
| NF | WF | NF | WF | |||||
| PSO | BA | PSO | BA | PSO | BA | PSO | BA | |
| 1 | 589 | 543 | 913 | 840 | 1.082 | 963 | 1.635 | 1.452 |
| 2 | 890 | 818 | 1.200 | 1.104 | 1.474 | 1.297 | 1.933 | 1.701 |
| 3 | 1.081 | 995 | 1.416 | 1.302 | 1.861 | 1.638 | 2.515 | 2.213 |
| 4 | - | - | - | - | 2.311 | 2.011 | 2.662 | 2.467 |
| 5 | - | - | - | - | 2.662 | 2.316 | 3.487 | 3.034 |
| # | Approach | Ref | A (%) | Better | Similar | Worst | |||
|---|---|---|---|---|---|---|---|---|---|
| PSO | BA | PSO | BA | PSO | BA | ||||
| 1 | Radial Basis Function Network | [34] | 65.77 | ✓ | ✓ | ||||
| 2 | Bayesian Network | [34] | 97.31 | ✓ | x | ||||
| 3 | Support Vector Machine (SVM) | [34] | 81.92 | ✓ | ✓ | ||||
| 4 | Sparse Random Projections and K-Nearest Neighbor | [34] | 100 | x | x | ||||
| 5 | Generalized Multiple Kernel Learning SVM | [35] | 97.90 | ✓ | x | ||||
| 6 | Generalized Multiple Kernel Learning SVM with PSO | [36] | 98.30 | ✓ | x | ||||
| 7 | Ensemble Empirical Mode Decomposition | [37] | 98.64 | ✓ | x | ||||
| 8 | Improved Ensemble Empirical Mode Decomposition with SVM | [38] | 98.75 | ✓ | x | ||||
| 9 | Proposed methodology based on PSO | - | 93.93 | ✓ | ✓ | ||||
| 10 | Proposed methodology based on BA | - | 96.02 | ✓ | ✓ | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nedjah, N.; Galindo, J.D.L.; Mourelle, L.d.M.; Oliveira, F.D.V.R.d. Fault Diagnosis in Analog Circuits Using Swarm Intelligence. Biomimetics 2023, 8, 388. https://doi.org/10.3390/biomimetics8050388
Nedjah N, Galindo JDL, Mourelle LdM, Oliveira FDVRd. Fault Diagnosis in Analog Circuits Using Swarm Intelligence. Biomimetics. 2023; 8(5):388. https://doi.org/10.3390/biomimetics8050388
Chicago/Turabian StyleNedjah, Nadia, Jalber Dinelli Luna Galindo, Luiza de Macedo Mourelle, and Fernanda Duarte Vilela Reis de Oliveira. 2023. "Fault Diagnosis in Analog Circuits Using Swarm Intelligence" Biomimetics 8, no. 5: 388. https://doi.org/10.3390/biomimetics8050388