1. Introduction
Measuring the state of charge (SOC) of batteries is a crucial task for battery management systems, as it is a key part of the more general problem of battery state estimation, including state of health, state of energy, and state of power [
1]. Several classes of methods for SOC estimation are available in the literature [
2]. These can be classified as: (i) direct methods, such as the open-circuit voltage (OCV) or impedance methods, which are based on a direct relationship between a battery parameter, e.g., the open-circuit voltage, and the SOC; (ii) coulomb-counting-based methods; (iii) tracking methods, such as Kalman-filter-based algorithms. Niri et al. [
3,
4] proposed a different approach for predicting the remaining energy of a battery in an electric vehicle using load analysis with Markov models. Moreover, Gallien et al. [
5] described an alternative SOC estimation method based on the relationship between magnetic susceptibility and SOC for lithium iron phosphate (LiFePo) batteries. Machine learning methods for SOC estimation have also been proposed, which are based on a relationship between the measured input quantities, i.e., voltage and current, and the SOC [
6].
Coulomb counting is one of the most widely used methods for practical online SOC measurements [
7]. This method consists of measuring the current that flows in and out of a battery and then integrating the measurement results over time. Using this method, the SOC at time instant
t is calculated as
where
is the SOC at time instant
with
,
is the current through the battery measured at time
, and
C is the capacity of the battery. When starting from a known initial SOC, this method allows to compute the updated SOC at later time instants [
8]. The main advantage of the coulomb counting method lies in its great practical value because it can be used in the operational phase while the current is flowing through the battery, e.g., while an electric vehicle is traveling. Conversely, direct methods such as that based on the open-circuit voltage cannot be used in the operational phase because in such a phase, it is not possible to disconnect the battery from the load to read the open-circuit voltage.
However, Movassagh et al. [
8] showed that coulomb counting is affected by several uncertainty sources, namely the current measurement uncertainty, the approximation used for current integration, the uncertainty of the battery capacity, and the timing uncertainty of the current sampling. The presence of such uncertainty sources represents the main disadvantage of the coulomb counting method. To mitigate the impact of some of these uncertainty sources, Baccouche et al. [
9] proposed an improved coulomb counting algorithm based on a piece-wise model of the OCV-vs.-SOC characteristic curve and a periodic recalibration of the capacity. The method is experimentally shown to provide 2% accuracy for SOC estimates. Liu et al. [
10] described an alternate method for SOC estimation, which combines current integration and an adaptive extended Kalman filter, shown to provide accurate results with a reduced computational complexity. Furthermore, Wang et al. [
11] used a deep learning method for SOC estimation, which integrates coulomb counting with cloud-based convolutional neural networks and results in a root-mean-square error lower than 1.5% with a maximum error of 5%. Miao et al. [
12] demonstrated experimentally that the combination of machine learning with coulomb counting may decrease the error with respect to stand-alone coulomb counting in extreme temperature conditions. Moreover, the impedance track method described in [
13] performs enhanced coulomb counting functionality by employing additional information, such as voltage and temperature measurements.
The coulomb counting methods described above require current measurement, e.g., by means of an external shunt resistor. However, in several high-power applications, such as electric vehicles and energy storage systems, the usage of a shunt resistor implies a loss in power and efficiency since considerable energy is dissipated when a large current flows through this resistor [
14]. Moreover, safety and reliability issues can occur due to a device being placed in the path of high current flow. Therefore, SOC measurement solutions that do not require a shunt resistor would provide numerous benefits, including a reduction in power consumption, a smaller size, a reduction of cost and complexity associated with the calibration of the shunt, and mitigation of safety and reliability issues. Thus, the need for developing and characterizing the accuracy of simple methods for shuntless SOC measurements arises. In this context, current-sensorless methods for estimating the SOC were proposed by Chun et al. [
15]. These methods are based on filtering the voltage measured at the battery terminals and on fitting equivalent circuit models, and a maximum error of 5% was reported.
In this paper, a novel SOC estimation method based on coulomb counting is introduced, where the current is measured using the internal resistance of the battery itself, rather than an external shunt resistor. Contrary to published coulomb counting methods, the proposed method requires only the measurement of battery voltage and the usage of look-up tables that are pre-generated during a calibration phase containing information about the internal resistance and open-circuit voltage of the battery. Differently from the current-sensorless approach in [
15], the proposed method does not rely on a battery equivalent circuit model or on filtering techniques, thus resulting in a reduced complexity and wide applicability, since it is not necessary to assume a specific equivalent circuit. In this paper, the proposed method’s feasibility is verified by applying it to experimental data, which consist of current and voltage measurements obtained using a commercial source measure unit (SMU) lab instrument on a lithium polymer battery under test following a realistic operational profile for electric vehicles. Although the feasibility study of the proposed method is carried out using lab instrumentation, the technique can potentially enable online cell-level condition monitoring for in situ and in operando applications [
16], made possible by integrated cell management units (CMUs), such as the one proposed by Manfredini et al. [
17].
Therefore, the main technical contributions of this paper can be summarized as follows:
- –
A shuntless SOC estimation method is proposed that exploits the knowledge of the internal resistance of the battery under test;
- –
The proposed method is validated by experimental results performed on a lithium polymer (LiPo) rechargeable battery with a realistic current profile emulating an electrical vehicle scenario.
Further investigation into the achievable performance and reliability of the proposed method when applied to other batteries and different current profiles is beyond the scope of this paper and is the subject of future research directions.
The remainder of this paper is organized as follows. In
Section 2, the proposed method is described. Then, in
Section 3, the experimental setup used to validate the method is presented, followed by experimental results. In
Section 4, a discussion of the results is provided. Finally, conclusions are summarized in
Section 5.
2. Proposed Shuntless SOC Measurement Method
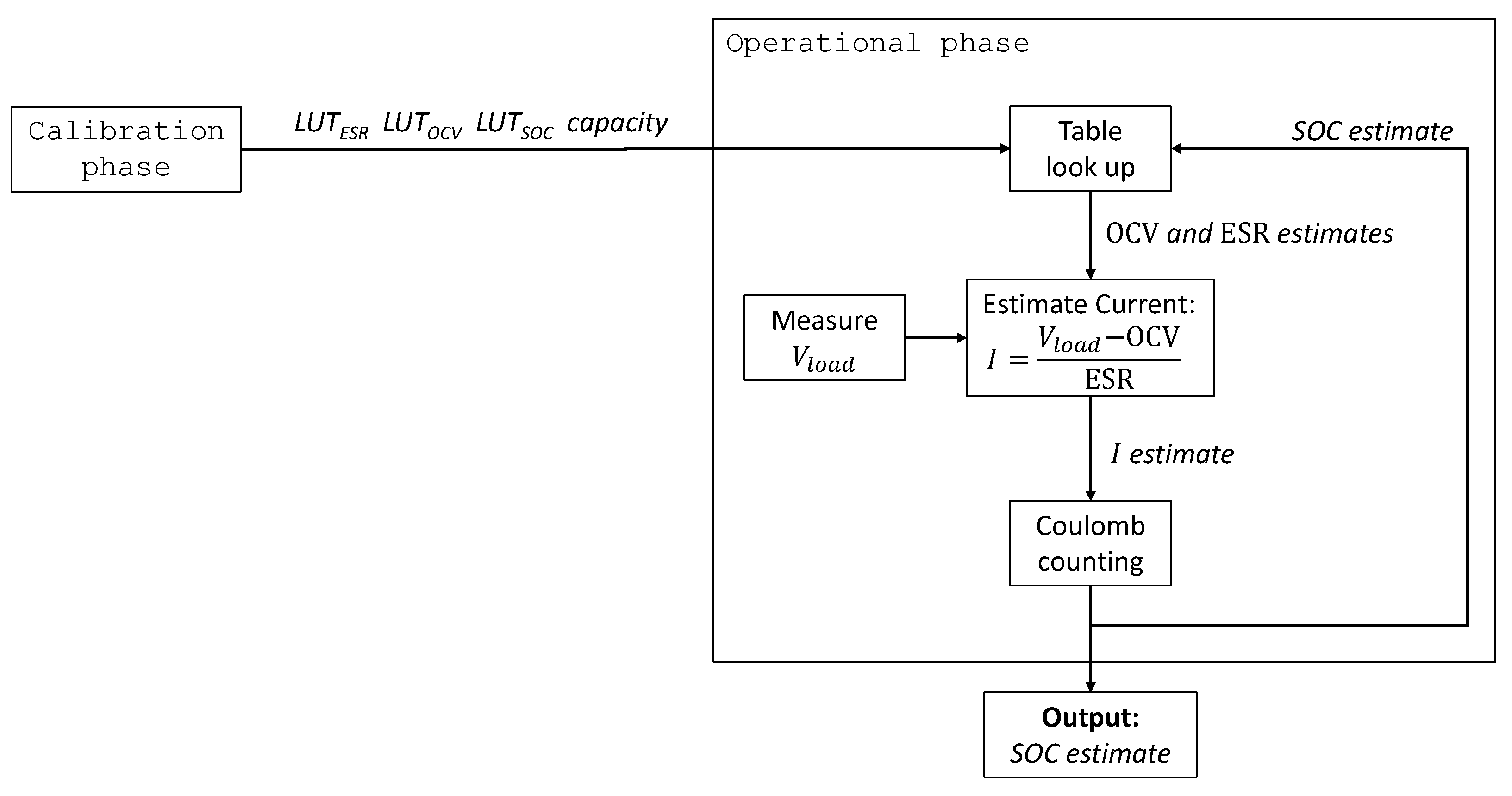
The aim of the proposed method is to obtain an estimate of the SOC without using a shunt resistor to measure current. The only measurement that is required during operation is that of the battery voltage under load
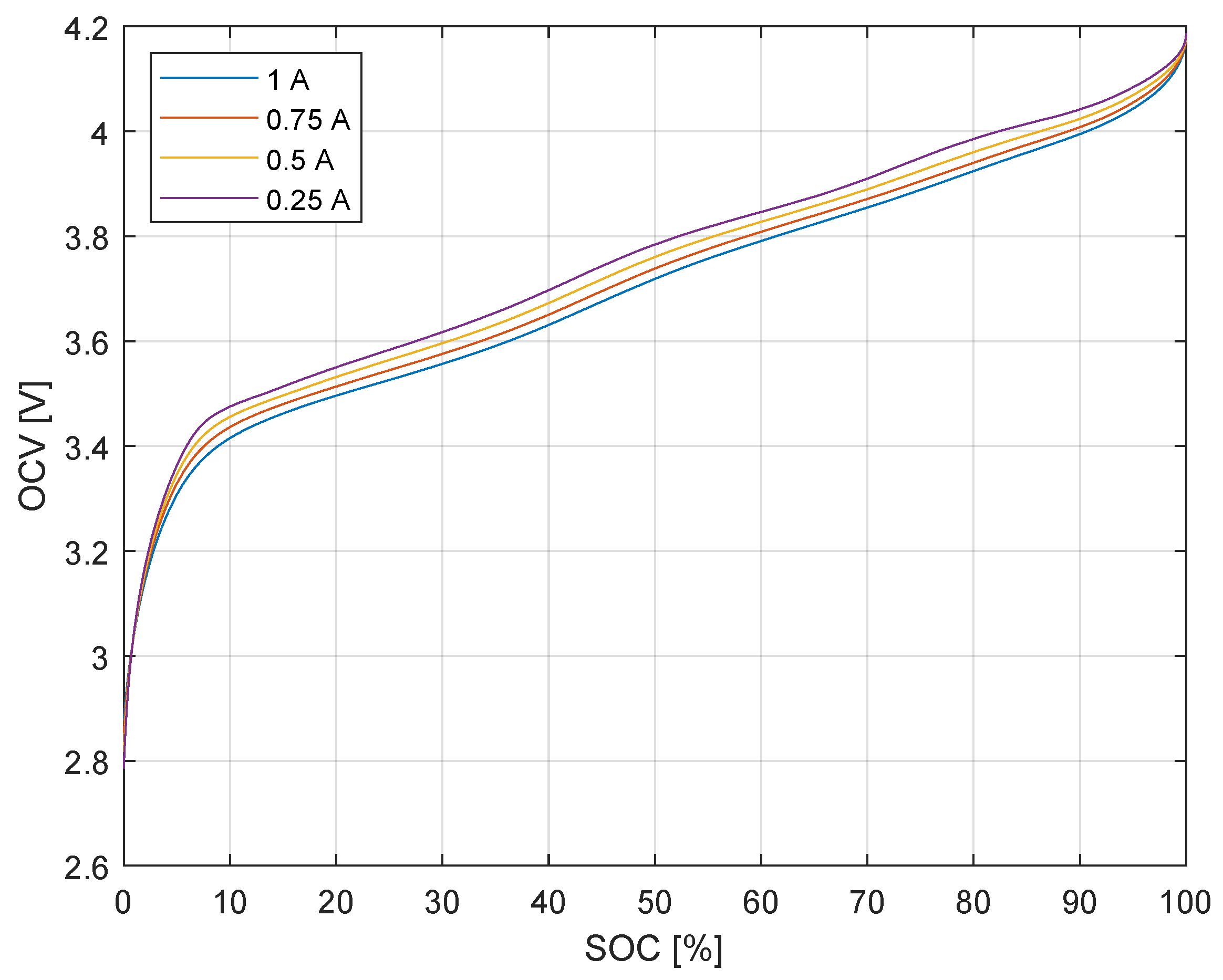
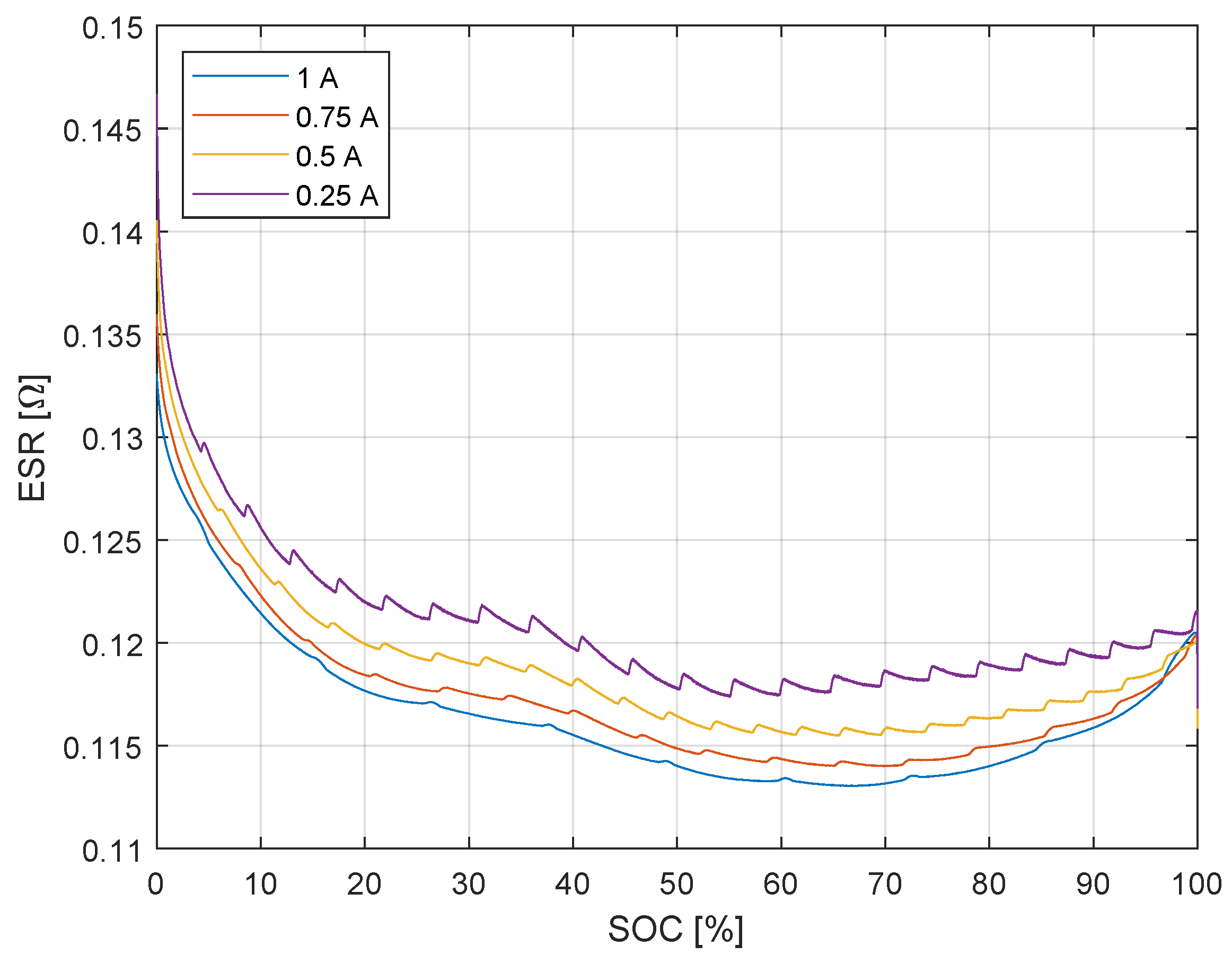
. Furthermore, look-up tables (LUTs), obtained during a preliminary calibration phase, are employed. These LUTs provide information about how the equivalent series resistance (ESR), i.e., the internal resistance of the battery, and the open-circuit voltage (OCV) vary for different values of SOC. These LUTs are built during the calibration phase by measuring the battery’s OCV, its voltage under load
, and the current for different SOC values with a reference instrument. A detailed description of the procedure to build the LUTs is given in
Section 3.2.1. The ESR, coupled with the knowledge of the OCV, is used in place of the external shunt to estimate the current and perform coulomb counting in the operational phase. A block diagram illustrating the operation of the proposed method is shown in
Figure 1.
The assumptions made for the proposed method are the following: (i) the capacity of the battery, the ESR-vs.-SOC, and the OCV-vs.-SOC relationships for the battery under test are known. These are measured in a preliminary offline calibration phase and encoded in LUTs; (ii) the SOC value at the initial time instant when the proposed method starts is known; (iii) measurements of the battery voltage are available during operation, while current is flowing through the battery.
The pseudo-code in Algorithm 1 describes in detail the operation of the proposed method. Specifically, this method takes as input the required LUTs that are pre-generated during a battery characterization phase. Specifically,
contains the OCV-vs.-SOC relationship,
contains the OCV-vs.-ESR relationship, and
serves as an index table. The method also requires an estimate of the battery capacity and returns as output an estimate of the SOC at every time step.
| Algorithm 1 Estimate SOC. |
| Input: (obtained in the calibration phase) Look-up-tables , , , battery capacity C |
| Output: SOC estimate, denoted as |
| 1: begin |
| 2: Start condition: battery fully charged |
| 3: Measure | ▹ First voltage measurement |
| 4: | ▹ Initial estimate of current |
| 5: | ▹ Initial estimate of SOC |
| 6: |
| 7: while True do |
| 8: | ▹ Charge increment (coulomb counting) |
| 9: | ▹ Estimate SOC at time step k |
| 10: return |
| 11: Measure | ▹ Voltage measurement at time step k |
| 12: index of the entry of closest to |
| 13: linear fit of eval. at |
| 14: linear fit of eval. at |
| 15: | ▹ Estimate current at time step k |
| 16: |
| 17: end while |
| 18: end |
Starting from a known initial SOC, which here is assumed to be 100%, the algorithm is first initialized by measuring and obtaining an initial estimate of the current as , where OCV and ESR are given by the respective LUTs. Then, at each iteration, coulomb counting is performed using the previous estimate of I to obtain a SOC estimate, followed by an update procedure that uses the new measured value of and table look-up operations to update the estimate of I.
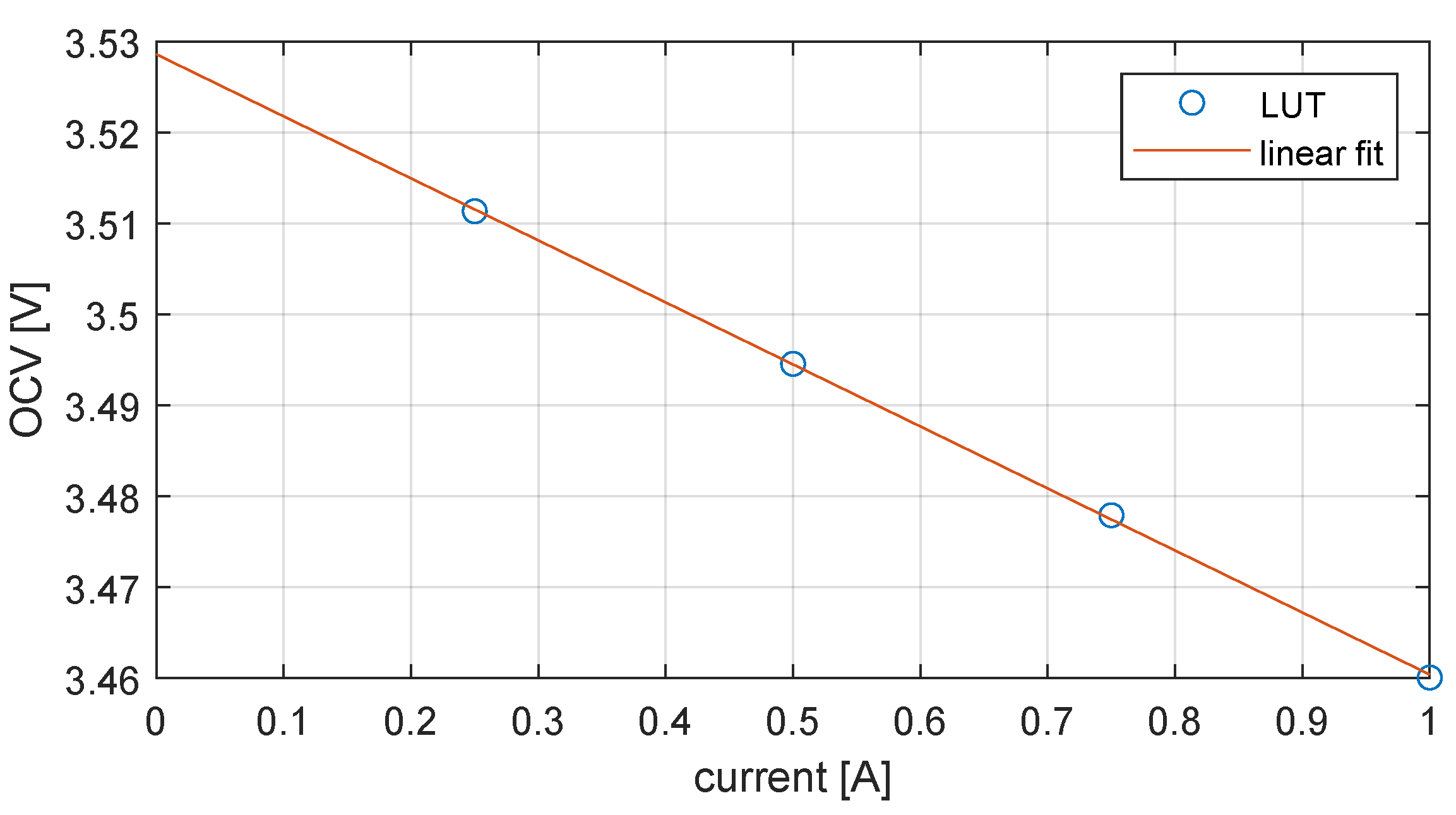
Since the OCV-vs.-SOC and ESR-vs.-SOC curves vary depending on the current flowing through the battery, in the calibration phase, the LUTs are built for n different values of the current , thus resulting in . Then, in the operational phase, at each time step k, the best-fit line (in a least-squares sense) on the data in is determined, thus obtaining a linear function relating current to OCV. This operation allows for using the LUTs for any generic current profile so that there is no need to use different LUTs for different current profiles. An estimate of OCV is then obtained by evaluating this function for the current estimated at the previous time step, i.e., . As described in Algorithm 1, the estimates of the ESR are obtained using the same linear regression technique as that used for the OCV.
Note that, in principle, the SOC may be estimated by simply inverting the OCV-vs.-SOC curve. However, this inversion requires that the OCV of the battery under test is measured after the relaxation period when the current is not flowing through the battery. This makes it unusable in online scenarios. Conversely, the proposed method can be employed online during battery operation.
A known initial SOC is a precondition for the proposed method. In a practical scenario, this precondition is satisfied when the battery is fully charged, i.e., after the standard charging procedure described by the manufacturer is completed. In this case, the known SOC is equal to 100%. Alternatively, when the battery is not used for a time interval longer than the relaxation period, the proposed method can still be used if the SOC is estimated using other methods, such as referring to the OCV-vs.-SOC curve or by electrochemical impedance spectroscopy.
Finally, in practical applications, the calibration procedure should be repeated periodically to account for the variations in the battery’s behavior due to aging.
4. Discussion
The results presented in
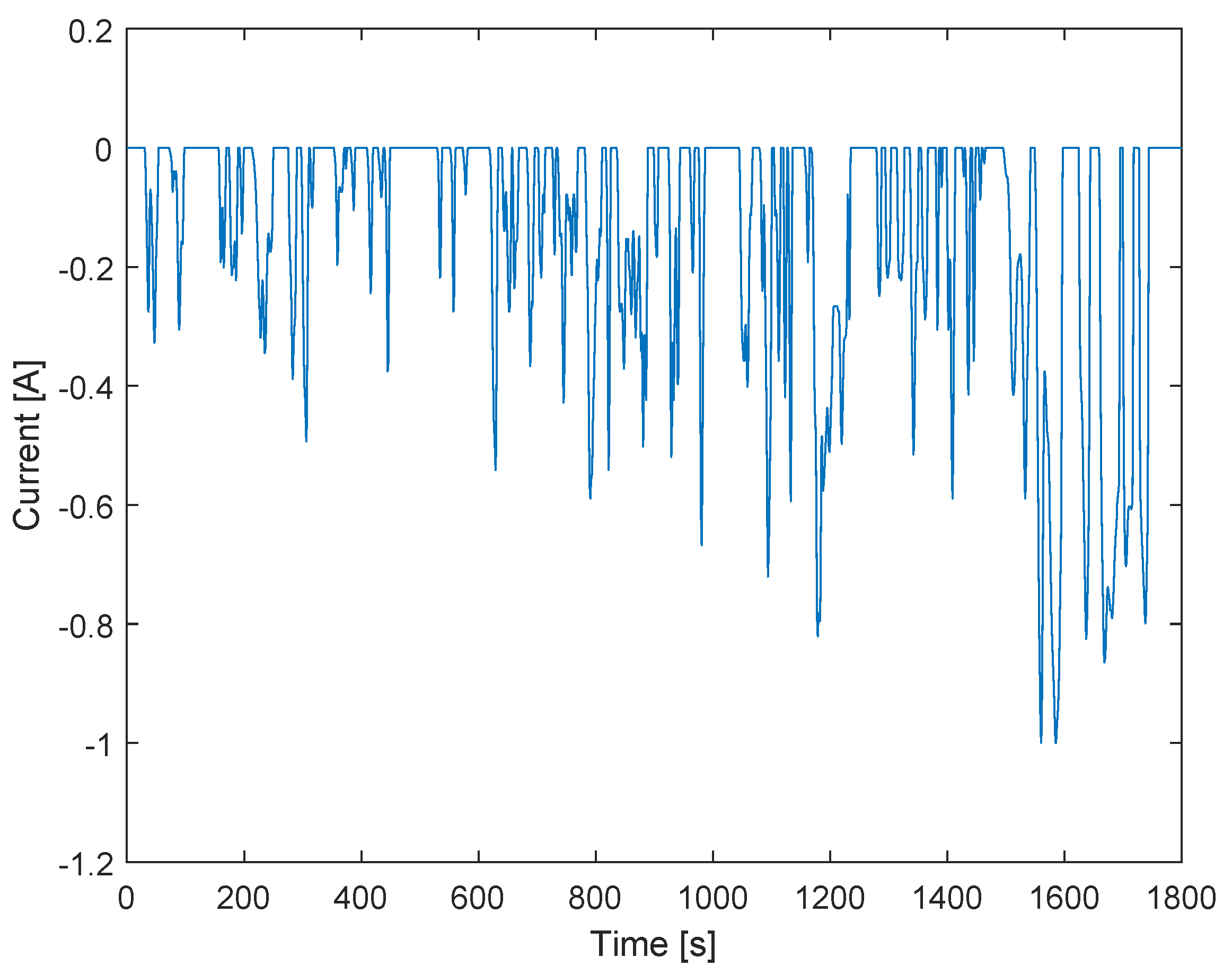
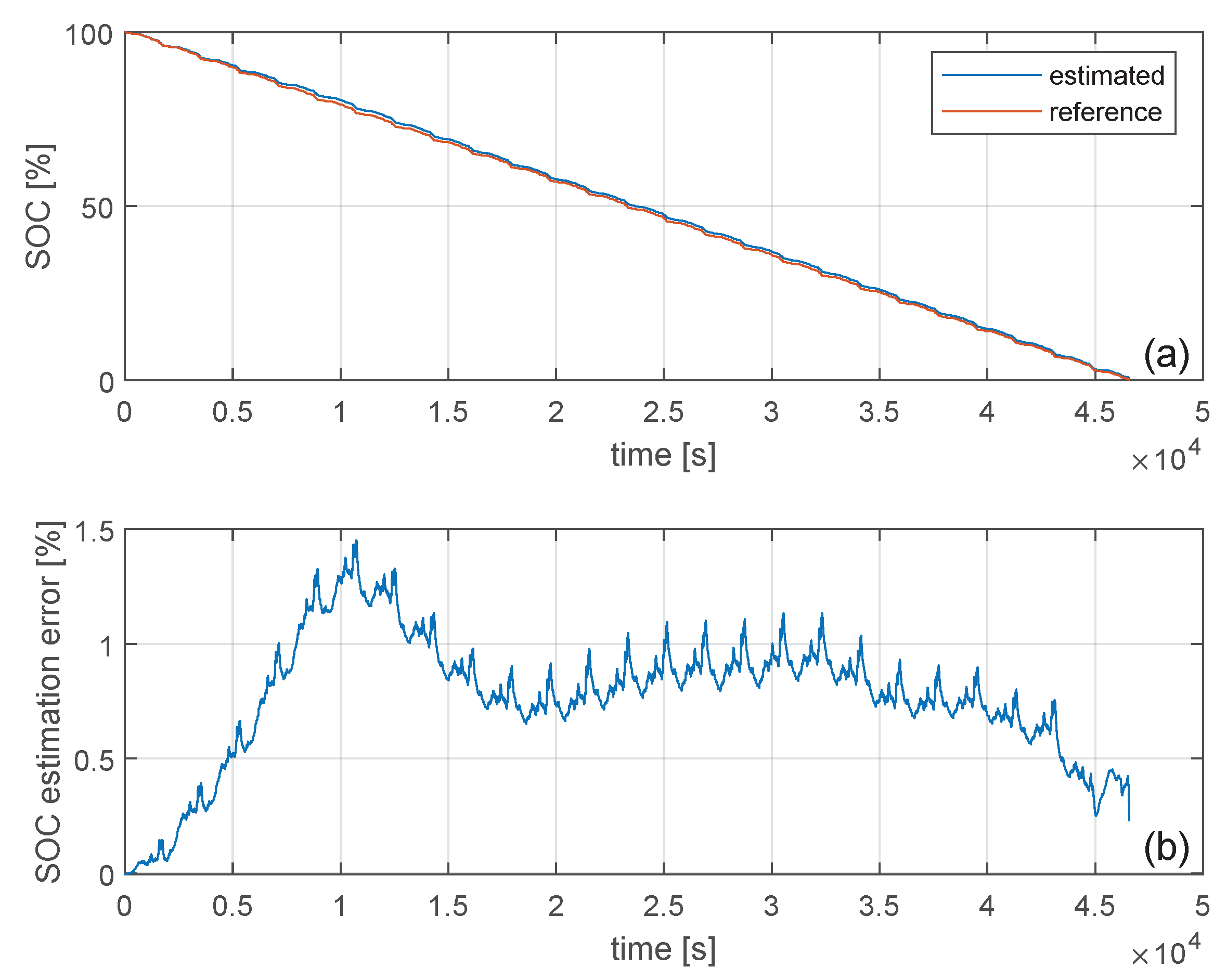
Section 3.3 prove the feasibility of the proposed shuntless SOC estimation method, with an accuracy that is sufficient for the most common battery monitoring applications (RMSE 0.82%). Such results were obtained by emulating a real-world scenario in the electrical vehicle field. Therefore, they indicate that the proposed shuntless method can be employed for in operando and in situ applications.
The SOC estimation literature contains other methods achieving errors of less than 1%, such as the proposed method, but most of these methods require the usage of an external shunt. Instead, the proposed method requires only the measurement of the voltage at the battery terminals and the usage of LUTs obtained via calibration. Therefore, it may overcome the energy consumption, reliability, and safety issues associated with the usage of an external-shunt-resistor-based current monitoring system. When comparing the results with the current-sensorless method presented in [
15], the achieved SOC error is smaller. Specifically, a maximum error of 1.45% is observed in this paper, whereas a maximum error of 5% was reported in [
15]. However, the proposed method follows a different approach as it does not rely on a battery equivalent circuit model and it does not use filtering techniques. Thus, it potentially has a smaller implementation complexity and wider applicability since it is not necessary to assume a specific equivalent circuit for the battery. Instead, it relies on a preliminary calibration of the battery under test. Therefore, it can be easily applied to different battery types and to various battery-powered systems.
Some factors that could potentially limit the applicability of the proposed method are the differences between specific battery samples, the influence of ageing, and the effect of the operating temperature. To compensate for the first factor, i.e., the variations in the OCV and ESR profiles between individual battery cells, the calibration procedure described in this paper should be applied individually to every battery of interest. Moreover, to mitigate the influence of battery aging, which modifies the OCV and ESR behavior with SOC, such calibrations should be repeated periodically as part of the maintenance process throughout the battery life-time, e.g., the battery should be re-calibrated after completing a certain number of operational cycles. Finally, temperature is another factor that affects the discharge profile of a battery by changing its internal resistance [
25] and OCV characteristics [
26]. A future development of the proposed method should therefore take into account the effect of temperature. This could potentially be done by acquiring the LUTs at several different temperatures during the calibration phase and then employing measurements from additional temperature sensors in the operational phase. Depending on the application, such sensors could already be present in the battery-powered system of interest.
5. Conclusions
In this paper, the possibility of using information about a battery’s equivalent series resistance to estimate its state of charge without directly measuring the current was investigated. In particular, a method for estimating the SOC of batteries without using a shunt for coulomb counting was presented, and its feasibility was investigated experimentally. The proposed method resulted in a SOC estimation RMSE of 0.82% in a realistic use case where a WLTP current profile was applied to a lithium polymer cell. Therefore, its feasibility was confirmed.
The described technique holds potential with the new cell-level sensors and distributed battery management systems (BMS), such as the ones proposed by the cell management unit (CMU) from Sensichips [
17] since individual cell re-calibration and measurement are made possible. Potential industrial and practical applications of the proposed method are in the electric vehicle and stationary energy storage fields. In these fields, the absence of a shunt resistor would avoid the energy loss associated with large currents flowing through the shunt resistor and thus improve efficiency and safety.
Future developments include using electrochemical impedance spectroscopy (EIS) information for building OCV and ESR LUTs, which may provide benefits in terms of AC impedance characterization over a wide range of frequencies and allow the management of fast variations of the current. Additionally, applying the proposed technique to several cells connected in series, as in battery packs, may improve accuracy when estimating the SOC of the overall battery pack. Additional future perspectives include further tests using other current profiles and on different batteries, investigations on the effect of smoothing and compression of the LUTs, and the implementation of the proposed method in an embedded processor for real-time in situ applications.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







