1. Introduction
A vapor bubble is a kind of gas that is generated by the instantaneous injection of high energy to liquid, such as laser, electricity, or other rapid heating methods. It has been applied in many industries; for example, the heat transfer of two-phase heat exchangers, surface corrosion caused by shock waves, injection without needles, and destruction of biological tissue using liquid jet superheat transfer [
1,
2,
3,
4]. In recent years, the study of vapor bubbles has attracted a lot of attention, but the dynamic process of vapor bubbles is nonlinear and highly complex [
5,
6]. It includes bubble oscillation and interface fluctuation during bubble growth, shock wave impact, and cavitation noise during bubble collapse. Understanding the deformation and collapse mechanisms of vapor bubbles is the key to successfully address these application-related challenges.
In order to study the dynamics of vapor bubbles, many researchers were involved in experimental research and numerical simulations. In experiments, the usual way to create vapor bubbles is to use pulsed lasers or electric sparks to shoot them instantaneously, and to observe the interaction of the bubbles with the solid surface using high-speed cameras [
7,
8]. Gonzalez et al. [
9] studied the dynamic process of laser-induced bubbles in liquid gaps at different heights. Sun et al. [
10,
11] concluded that the thermal effect plays an important role in the growth and collapse of vapor bubbles in microchannels. Kangude et al. [
12] studied the cavitation mechanism of vapor bubbles on hydrophobic surfaces using the thermal imaging method. The experimental results of Tang showed that the hydrophobic coating has a significant influence on the growth process of laser-induced bubbles [
13]. According to the three-dimensional view of the experiment, Hement et al. [
14] found that the near-wall bubble collapses very rapidly, and that the tangential flow would lead to the formation of the ring cavity. Considering the influence of gravity and viscosity, Sangeeth et al. [
15] studied the jet velocity resulting from bubble collapse at a liquid surface; the dependence of the dimensionless jet velocity, expressed in terms of the Weber number, on the Bond number, is determined by the dimensionless cavity depth. The Weber number is used to measure the relationship between the surface tension and the inertia force, and the Bond number is used to measure the relationship between the gravity and the surface tension. By using a spark-generated device and a high-speed camera, Zhang et al. [
16] conducted an experiment on the dynamic process of vapor bubbles under water; six classical water burial phenomena were induced, and their forming mechanism was analyzed. Ma et al. [
17] investigated the growth of vapor bubbles under different levels of gravity by conducting an experiment and found that gravity has a significant influence on the growth of a single vapor bubble.
Besides experiments, many numerical methods have also been reported to analyze the bubble dynamics, including the Lattice Boltzmann method (LBM), the finite difference method (FDM), the finite volume method (FVM), the volume of fluid method (VOF), the smoothed particle hydrodynamics method (SPH), and so on. Liu et al. [
18] deduced the relationship between the various characteristic parameters of bubbles, then explored that different liquid parameters would have a significant impact on the cavitation process based on the FDM. Phan et al. [
19] used a compressible homogeneous mixture model to numerically investigate the dynamics of an underwater explosion bubble, and the dynamic bubble motion including the bubble expansion, contraction, collapse, jet, and rebound. As for the VOF methods, they contain the algebraic VOF and geometric VOF methods. Owing to the merits of mass conservation, the latter was widely applied in the bubble simulation in [
20]. By using the VOF method, Tang [
13] simulated the hydrophobic wall surface by controlling the thickness of the air film at the solid–liquid interface, studied the oscillation behavior of the laser-induced bubble, and summarized the dynamic mechanism and law. Nguyen et al. [
21] used a geometrical VOF algorithm based on the piecewise–linear interface calculation (PLIC) to numerically investigate the dynamic behavior of bubble collapses, water jets, and pressure loads during the collapse of the bubble near walls and a free surface; the results showed a good agreement between the simulation and experiment of the bubble dynamics during the collapse process. Erin et al. [
22] used the SPH and VOF methods to simulate the rising of bubbles, and compared with previous experimental results, they concluded that both the VOF and SPH methods may be used to capture physically realistic transient and steady-state multi-phase systems; the SPH method could better capture the centroid of the bubble, while the VOF method better captured the rising velocity of the bubble.
SPH is a meshless method. It is uniquely capable of representing the dynamic evolution of complicated geometries without additional algorithmic complication, such as those found in multi-phase flows [
22]. When simulating fluid dynamics problems, the SPH method discrete the flow field into moving fluid micro clusters, which can be regarded as a combination of a series of molecules with the same properties [
23]. Unlike the traditional grid algorithm, SPH has no grid connection between the particles, and follows the interaction between the particles, which is suitable for any large deformation problem. On the other hand, the SPH method uses the Lagrange method to describe the flow field, which can be used to study some multiphase flow problems with discrete phases and has obvious advantages over the traditional grid algorithm in the study of large deformation and dynamic boundary problems.
The diffusion interface method (DIM), based on the SPH method, is more commonly used when involved in the precise capture of the gas–liquid phase flow interface [
24]. Sigalotti et al. [
25] first used the DIM, which treats the gas–liquid interface as continuous, added the Korteweg tensor to characterize the capillary forces, and used the SPH algorithm [
23] to solve, which was proven to be useful in cavitation hydrodynamics. Gallo et al. [
26] verified the study on the nucleation of vapor bubbles in metastable liquid by using the DIM. Wang [
24] applied the DIM to numerically simulate the rising of vapor bubbles in static water, and proved that it is feasible to calculate the dynamics of vapor bubbles by using the DIM. Moreover, the relation between the shape of the rising vapor bubble and the dimensionless parameters such as the Reynolds number was also introduced.
Based on the gas–liquid DIM, the Navier–Stokes–Korteweg (NSK) equation considering the gas–liquid interfacial tension is derived, the van der Waals (VDW) equation of state is introduced, and the SPH algorithm is used for the numerical solution. The effects of the shear viscosity
ηs and the heating distance
L on the growth and collapse processes of the vapor bubble are taken into account. The regularity of the effect of the Re number and the Oh number on the deformation of vapor bubbles is summarized through a further analysis of several cases, which can be summarized into four major patterns. Then, the formation mechanism is analyzed, and the growth and collapse of the bubbles are studied. According to our results, it is possible to precisely control the deformation of vapor bubbles by adjusting the two dimensionless parameters, the Re number and the Oh number. This has a certain engineering guiding significance for the current application, for example, the avoidance of surface corrosion caused by nuclear boiling, the dispersion of poisonous droplets caused by the disintegration of vapor bubbles, and the effect of bubble deformation on EHD-enhanced boiling heat transfer [
27].
2. SPH Modeling
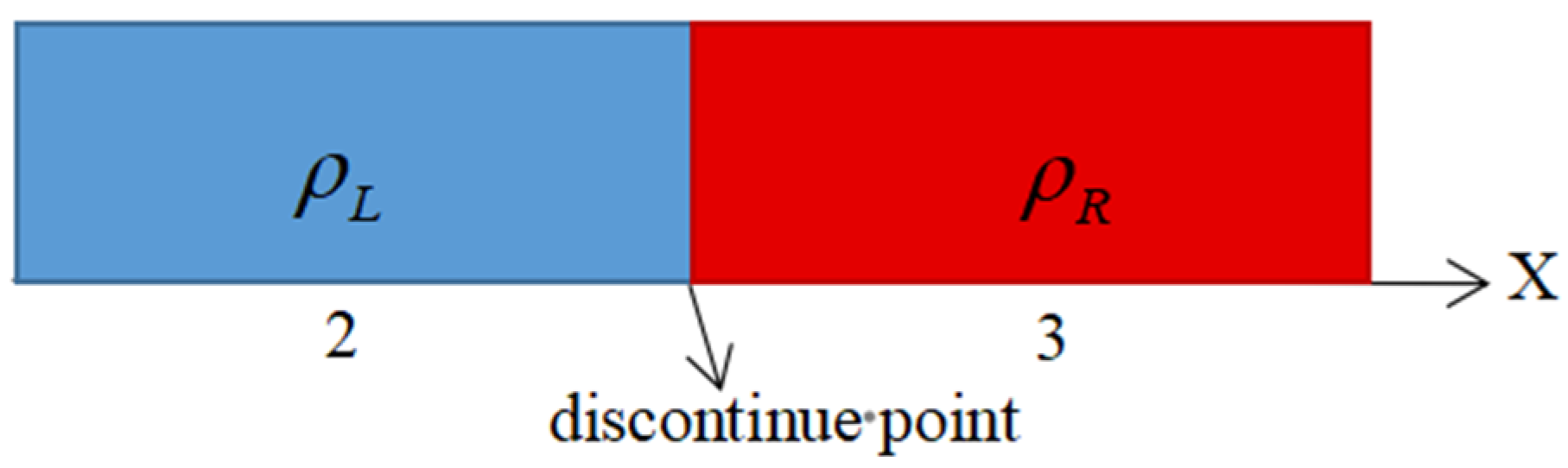
In our model, compressible vapor and liquid are considered to be two-phase fluids with a continuous density gradient. In the Lagrange formula, the liquid and gas phases uniformly follow the conservation equations of mass, momentum, and energy as follows:
where
is the density,
v is the velocity vector,
M is the stress tensor,
FE is the external force of gravity,
T is the temperature, U is the internal energy, and
κ is the thermal conductivity. The stress tensor
M includes the pressure terms, the shear and bulk viscosity terms, as well as an additional Korteweg tensor
Mc of the gas–liquid diffusion interface, as follows:
where
p represents the pressure, dim represents the dimension of space, and
ηs and
ηv are the shear and volume dynamic viscosity, respectively. The Korteweg tensor
Mc can be used to simulate the capillary force on the interface due to the density gradient, expressed as follows:
where
K is the gradient energy coefficient for a given material.
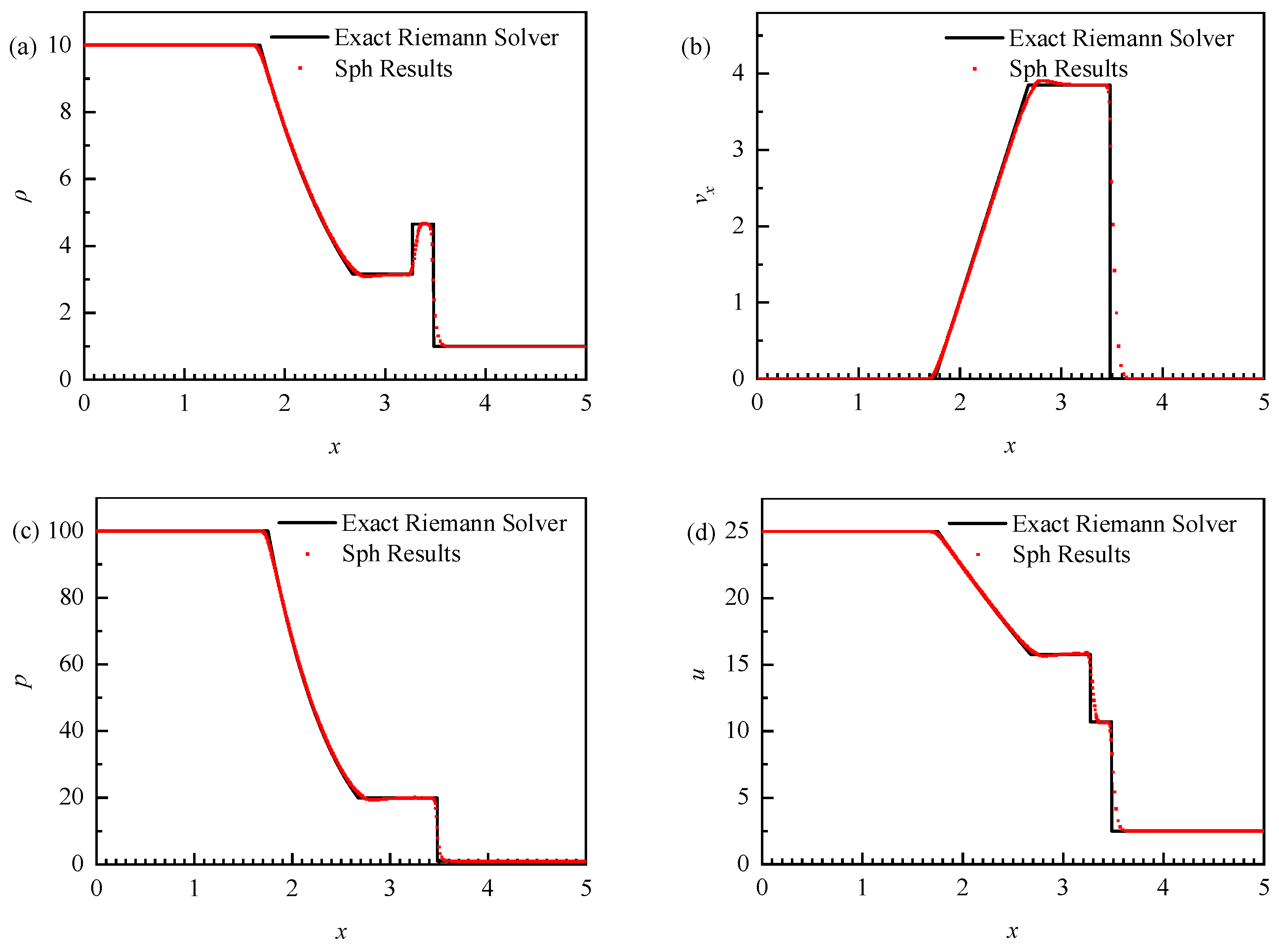
According to the description of the SPH model, the density can be better described in the following summation density Equation (6), instead of the continuity Equation (1). The summation density conserves mass exactly and guarantees second-order accuracy [
25], which benefits the simulation of the liquid–vapor interface.
where
m is the particle mass, the subscript
b indicates the neighbor particles around this particle
a, the subscript
ab denotes the variable difference between particle
a and
b, the subscript
b represents the adjacent particles around particle
a, and
Wab is a kernel function, which explains the particle distance between particles
a and
b.
The momentum and energy calculations are discretized into long-range and short-range terms, because the same smoothing length for all the force terms was unable to handle the surface tension effects and cause the interfacial instability [
28] as follows:
where the short-range repulsive term has the smooth length of
h with no mark, and the double smooth length of
H = 2h is used for the long-range attractive term and marked with superscript
H.
M and
MH are equal to
and
, respectively.
In this paper, we use the hyperbolic kernel function proposed by Yang [
29], which ensures that the distribution of particles is more uniform in both the two-dimensional and three-dimensional problems and does not lead to the unstable growth of stress, so better results can be obtained in the simulation.
In order to close the momentum and energy equations, the VDW equation is chosen to describe the pressure state equation, which can describe the gas–liquid coexistence system. The expression of the van der Waals equation of state is as follows:
where
is the Boltzmann constant,
is the parameter of attraction, and
is related to the size of the particles. And the critical state is expressed by these three parameters:
where
,
, and
are set as 1, 2, and 0.5 for the VDW fluid, respectively. Here, the gas or liquid phase is distinguished by the critical density of the VDW fluid. According to the VDW isothermal curve [
30], when
, the VDW equation transforms into the ideal gas law. Therefore, if the fluid density is less than the critical density, it is the gas phase. Otherwise, it is the liquid phase.
Using the SPH discretization Equations (6) to (8) and coupled with the VDW EOS Equation (9), the liquid and the heated vapor are simultaneously simulated. After that, the bubble position, velocity, size, and other properties are analyzed. More key parameters could be characterized by the following dimensionless numbers: Re represents the Reynolds number, which is used to measure the relationship between the inertia force and the viscous force, and Oh represents the Ohnesorge number, which is used to measure the relationship between the viscous force, the inertia force, and the surface tension. Their expressions are as follows:
where
represents the liquid density,
represents the average velocity of the bubble,
Dmax represents the maximum diameter,
Rmax represents the maximum radius as
Rmax =
Dmax/2,
represents the surface tension coefficient, and
ηs represents the dynamic viscosity coefficient.
The NSK equation is simulated in a non-dimensional scale; thus, all the data are presented without specified units in the following part. It is convenient to examine those bubble and liquid characteristics with the key non-dimensional parameters of the Re and Oh numbers. In the meantime, these non-dimensionalized parameters could be referred to dimensional ones using the given material properties. Here, for the water and water vapor bubble, the reference values in the length, temperature, time, and mass scales are 5.33 × 10
−8 m, 546 K, 1.36 × 10
−10 s, and 7.33 × 10
−20 kg, respectively [
30].
4. Numerical Settings
The critical fluid density is introduced to distinguish between the liquid and vapor. The SPH liquid particle mass is
m = 0.6, the stable density is
ρ = 1.2029, the initial fluid temperature is
Tb = 1.01, the heating height
L above the solid wall is set to be
L = 15~120, the shear viscosity is
ηs = 0.1~1.0 as shown in
Table 1, the volume viscosity is
ηv = 0.5
ηs, the 400 × 160 particles are arranged at the bottom area in the x and y directions, the heating radius is
r = 12dx, and the excess heat is ∆
T = 12. The region is uniformly spherical after laser heating. The left and right boundaries are periodic boundaries, and the upper and lower wall are set as adiabatic solid boundaries, which can be referred to in our previously published study [
30]. The vapor bubble heating geometry in our simulation is shown in
Figure 1. The values of the three dimensionless parameters
γ,
ε, and
λ, defined in
Section 3.1, are shown in
Table 2.
6. Conclusions
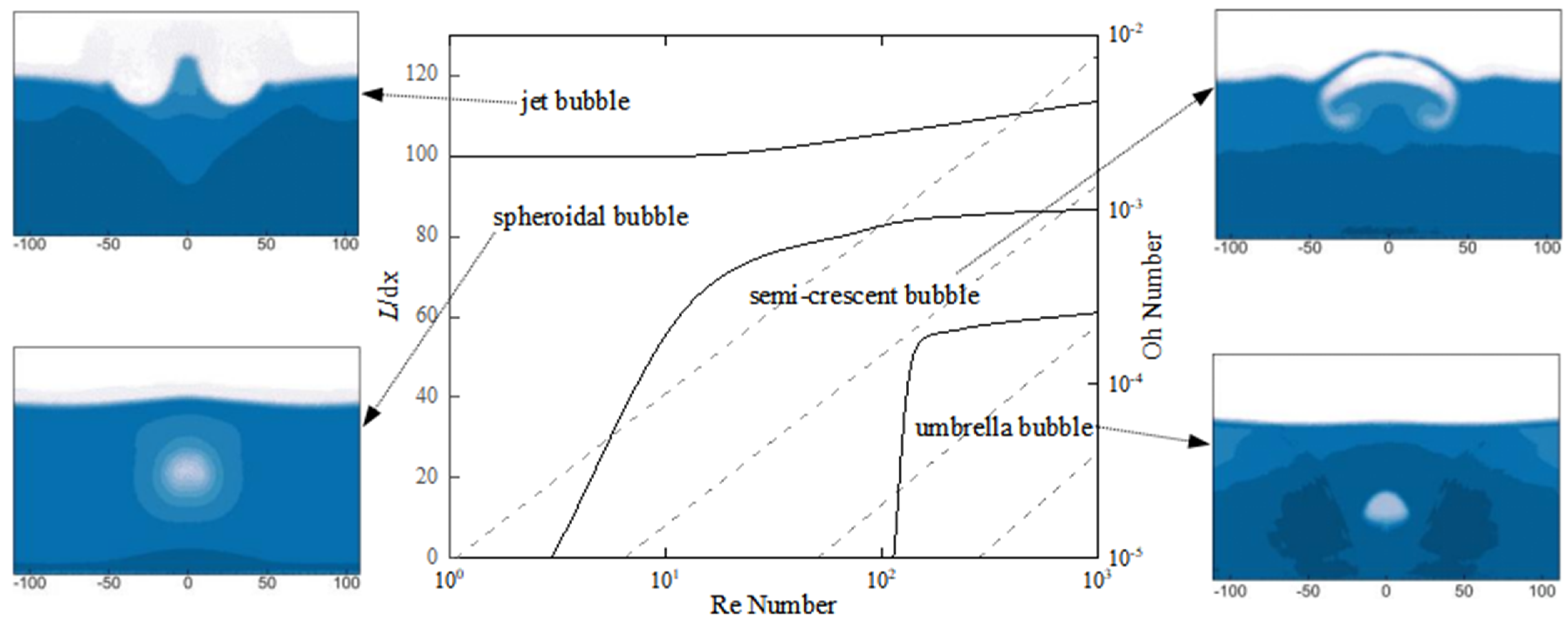
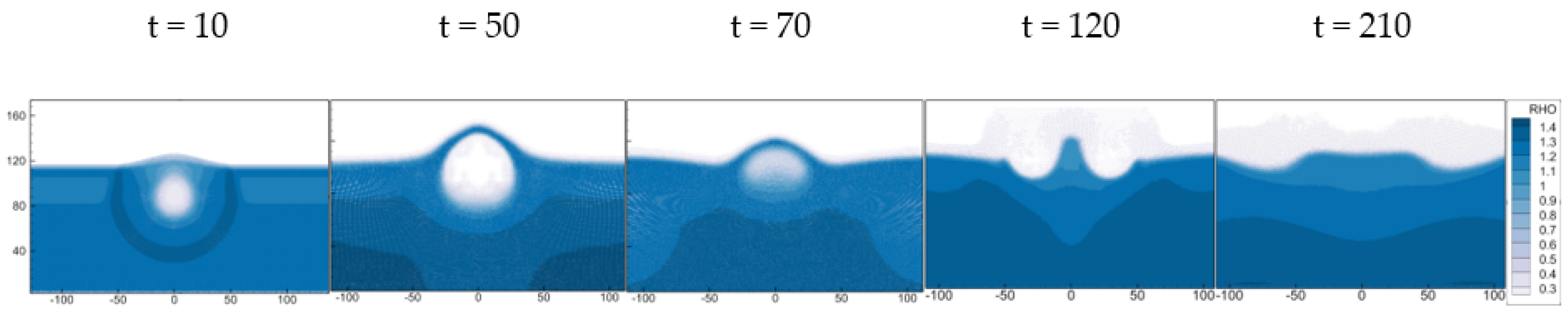
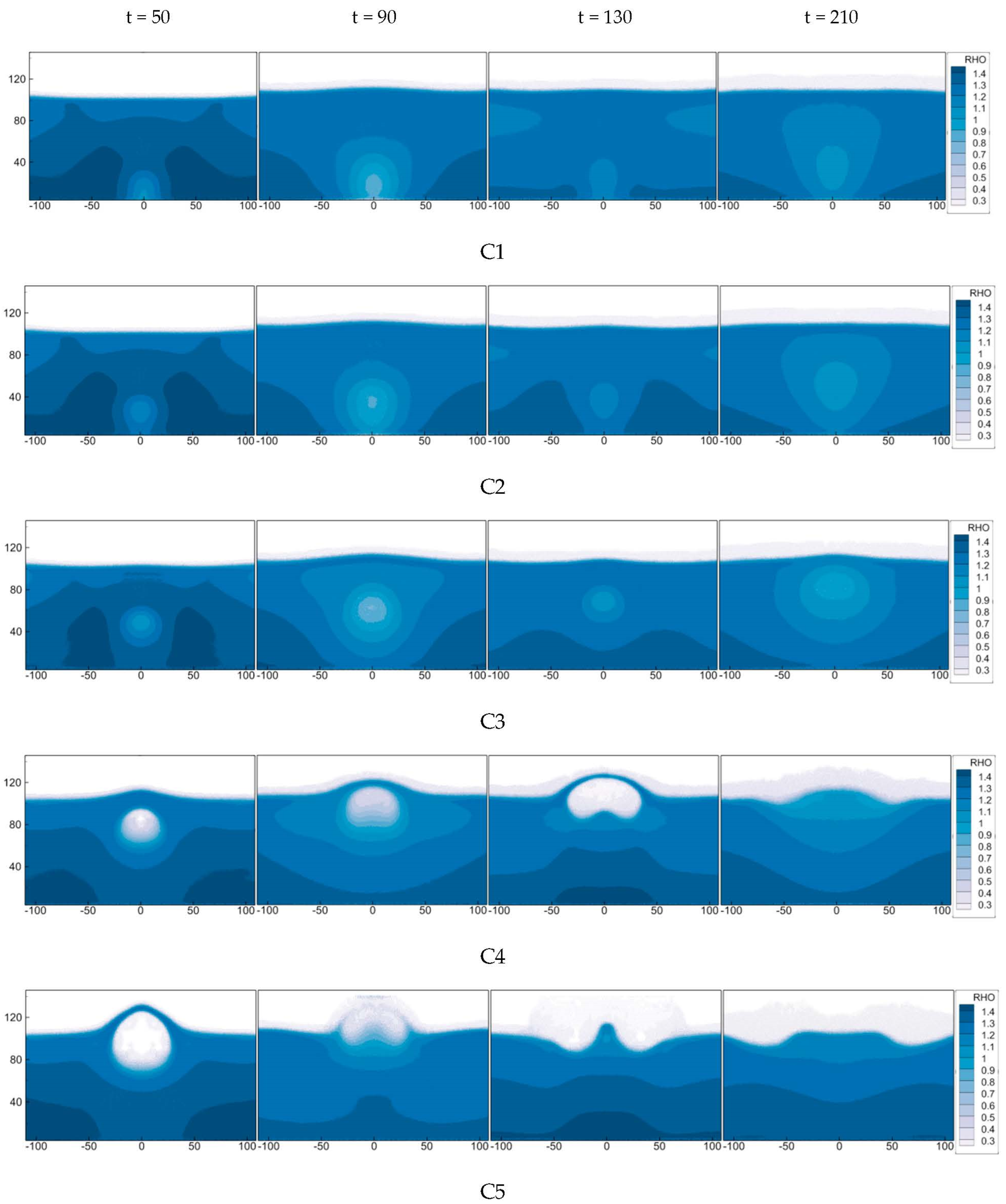
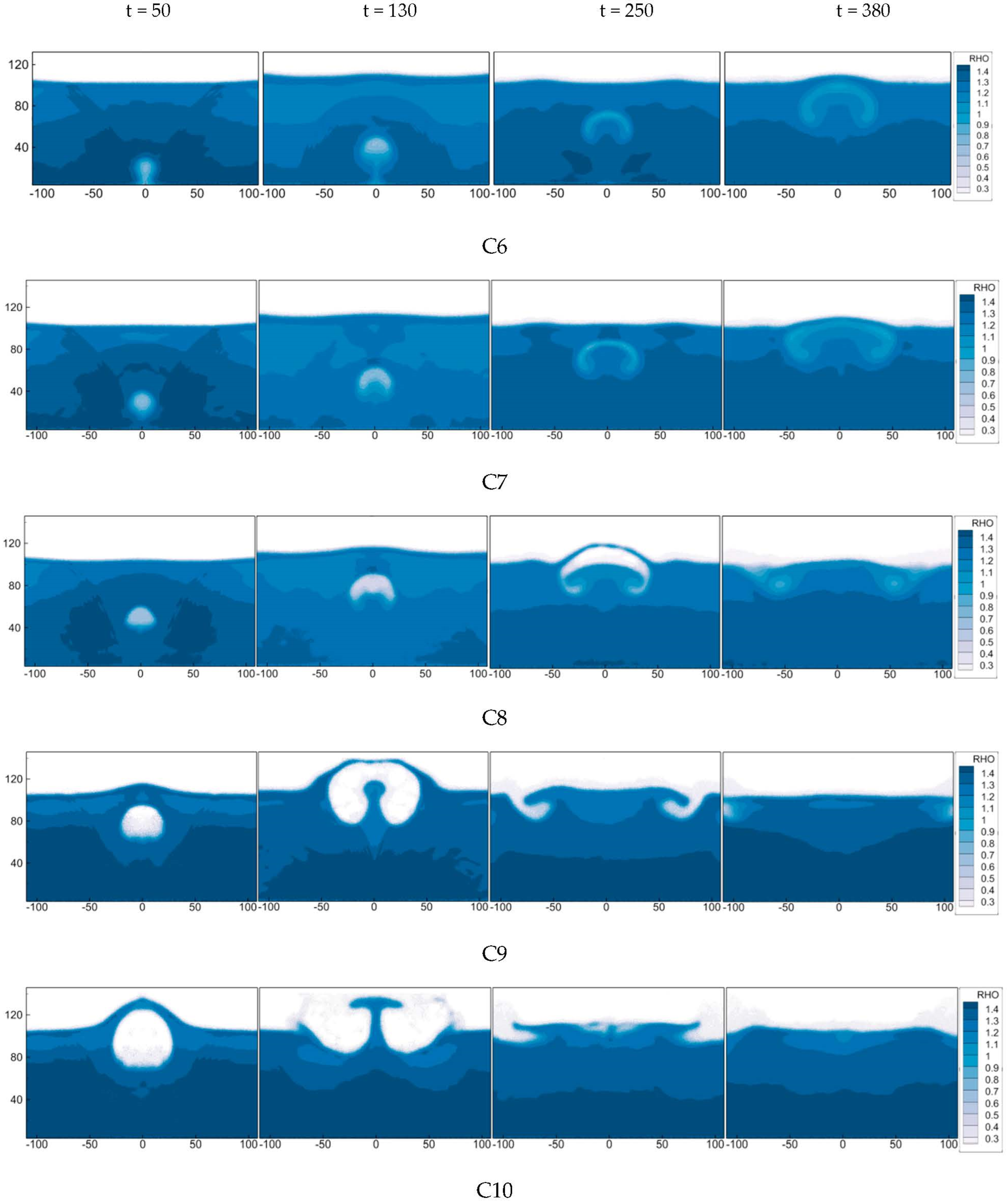
We used the SPH numerical simulation method to directly simulate the deformation and collapse of a vapor bubble near the free surface after being heated and raised from the bottom wall; the effects of the shear viscosity ηs and the heating distance L on the growth and collapse processes of the vapor bubble were taken into account. The regularity of the effect of the Re number and the Oh number on the deformation of the vapor bubbles was obtained through a further analysis of several cases, which can be summarized into four major patterns. The classification and mechanism were carried out according to the four major patterns of jet, umbrella, semi-crescent, and spheroid, and the category under each pattern was drawn. The main conclusions are as follows.
For liquid-surface bubbles, the Re number has little influence on them, as there is no significant difference in the specific deformation of the bubbles and the changes in the longitudinal diameter of the bubbles. When Oh > 5 × 10−3, all of them showed a jet shape, and the jet state is more obvious as the shear viscosity increases.
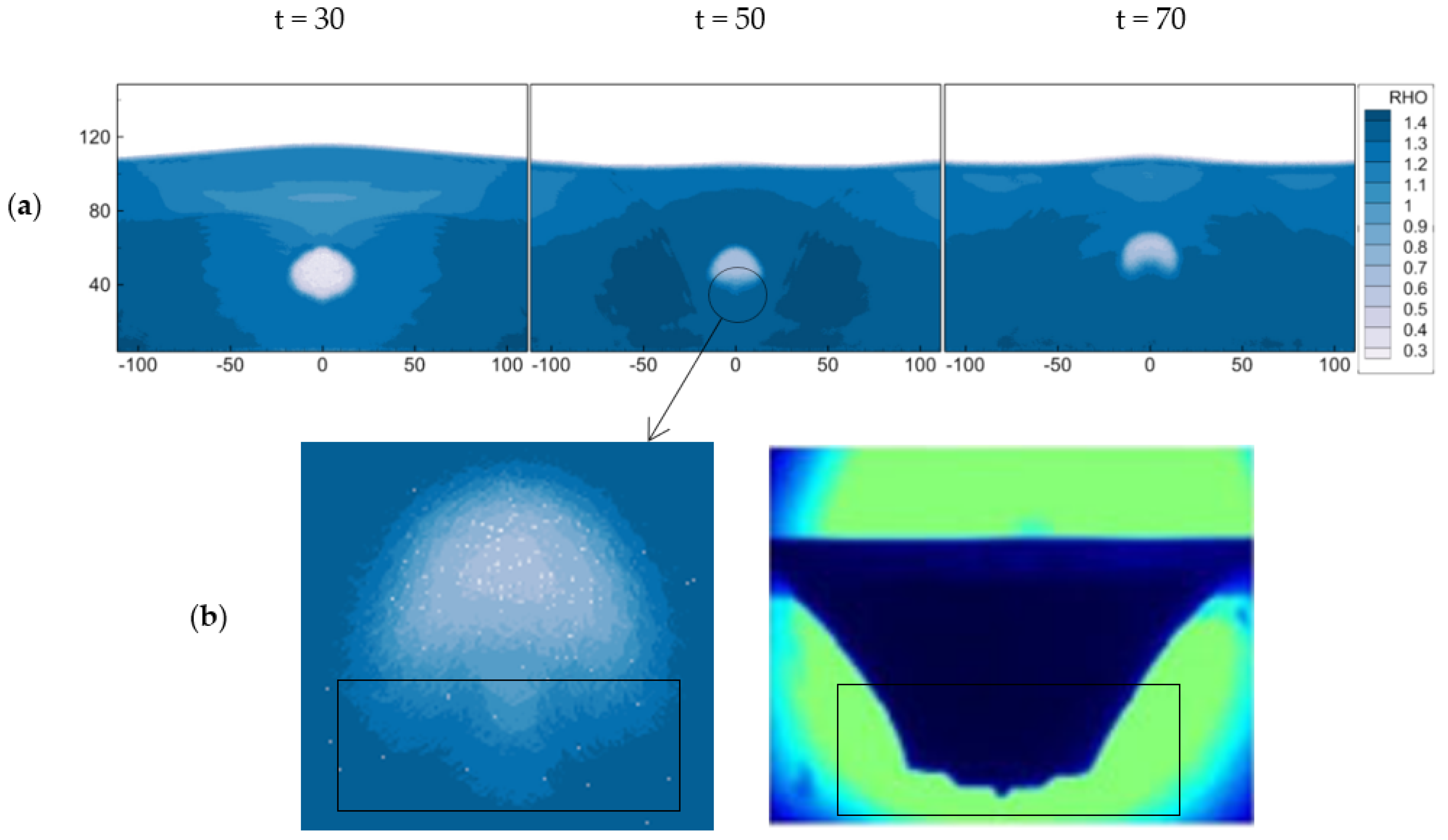
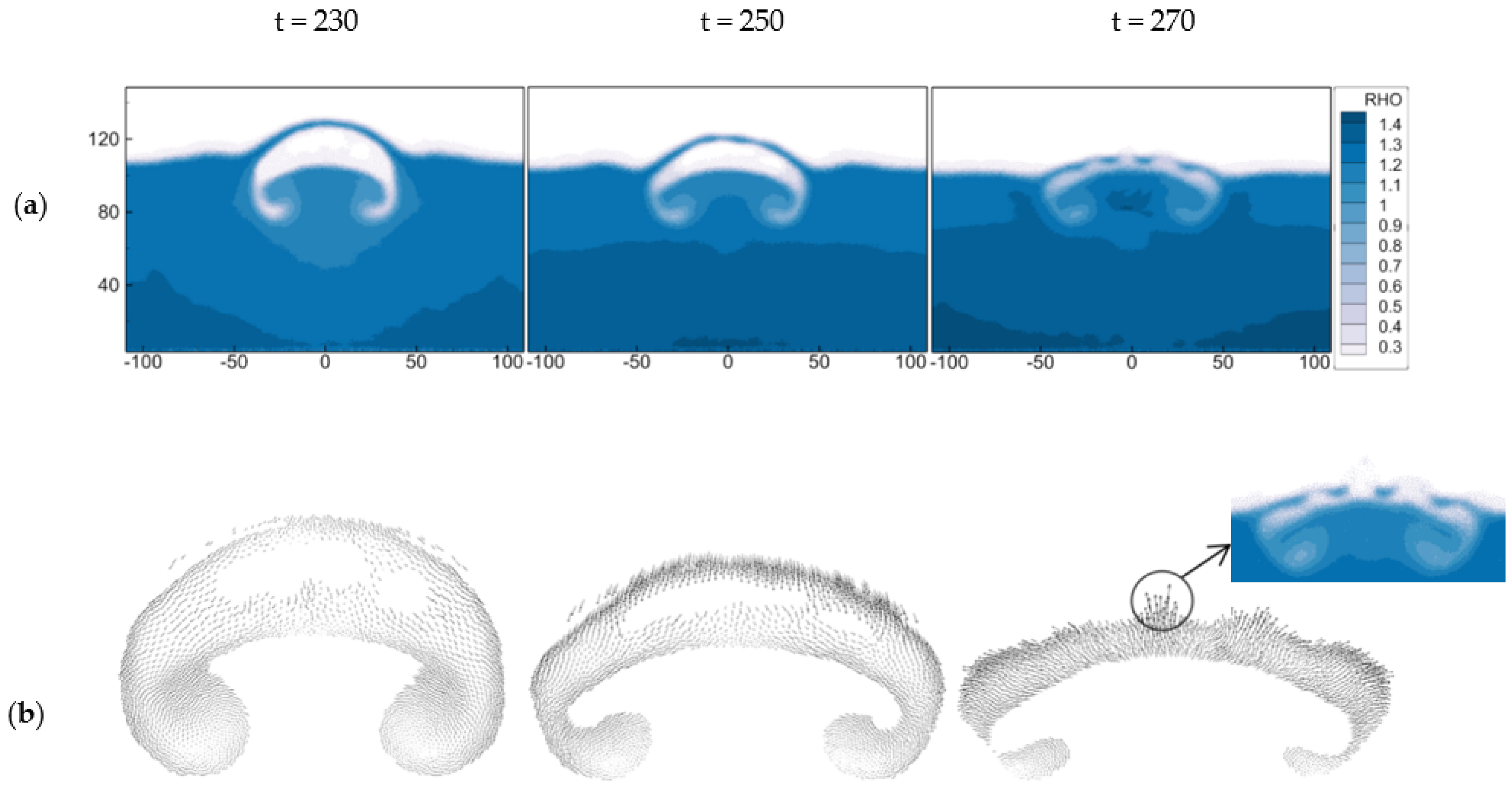
For near-wall bubbles, the Re number has a great influence on the bubble deformation; the shape can be categorized into umbrella, semi-crescent, and spheroid. For Re > 1.5 × 102 and Oh < 3 × 10−4, the bubble appears to have an umbrella shape; for Re < 5 × 100 and Oh > 10−3, the bubble appears to be spheroidal; and for 5 × 100 < Re < 1.5 × 102, 3 × 10−4 < Oh < 10−3, the bubble appears to have a semi-crescent shape. Near-wall bubbles experience inhibited longitudinal growth and often collapse at the liquid surface without creating the jet shape. Additionally, the balance of the surface tension and inertia force, influenced by the Re and Oh numbers, contributes to the formation of different bubble shapes.
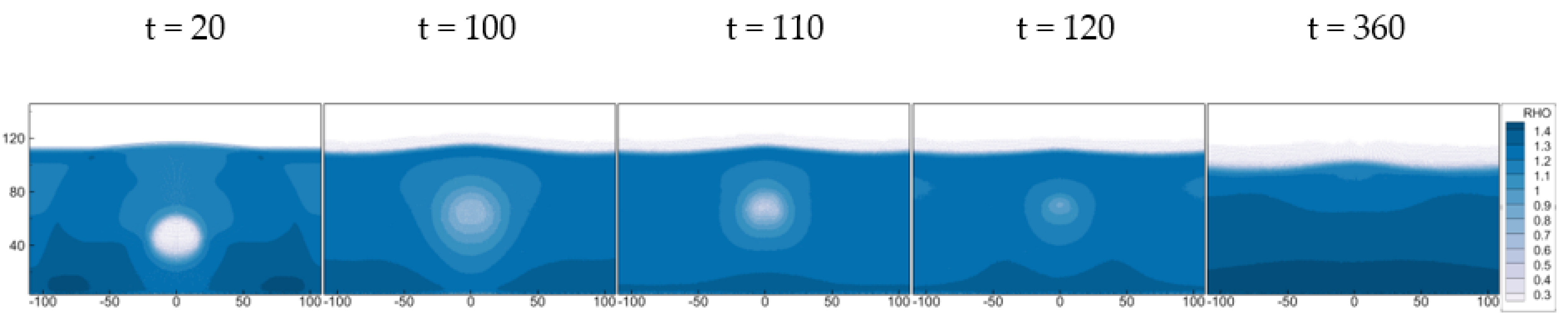
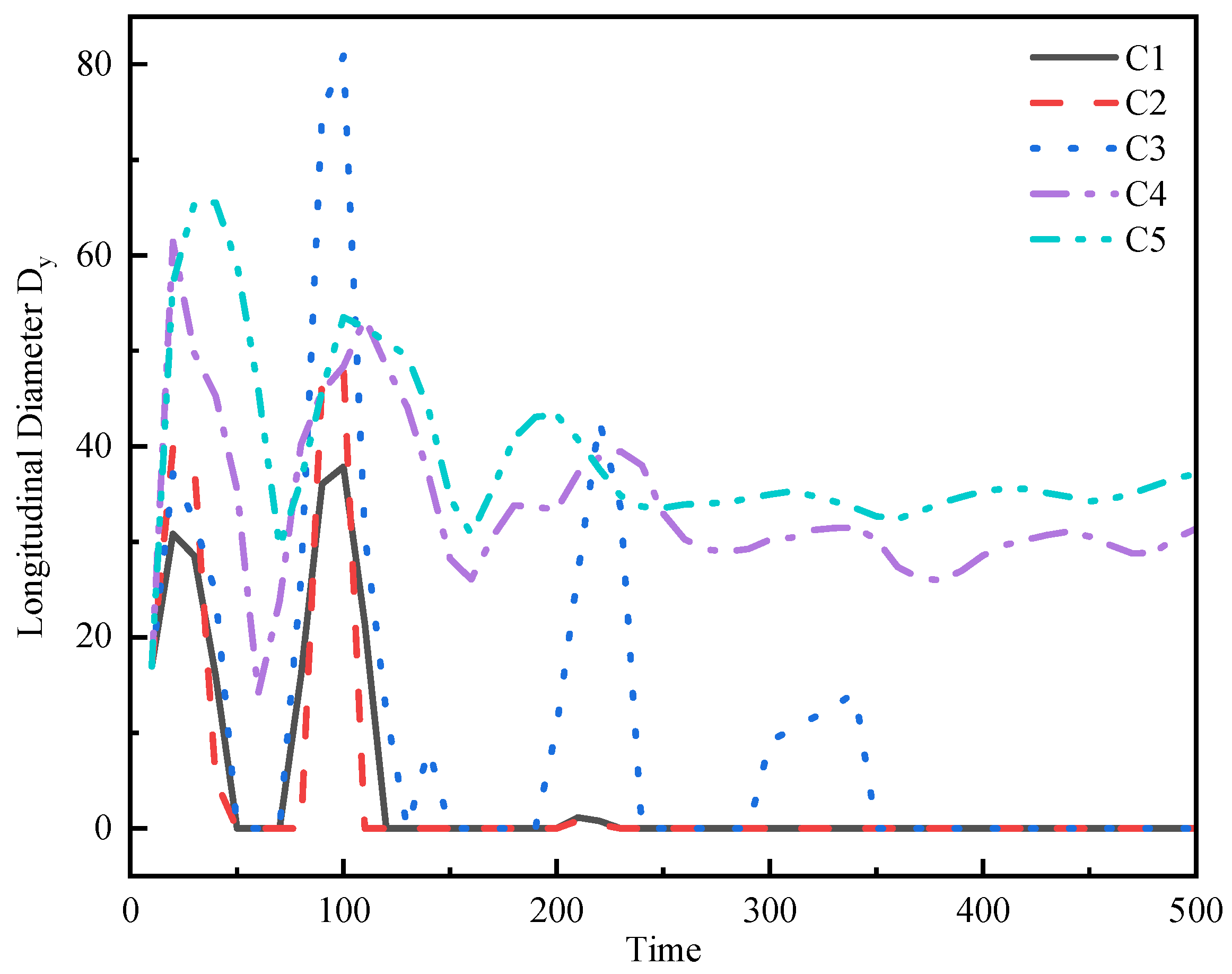
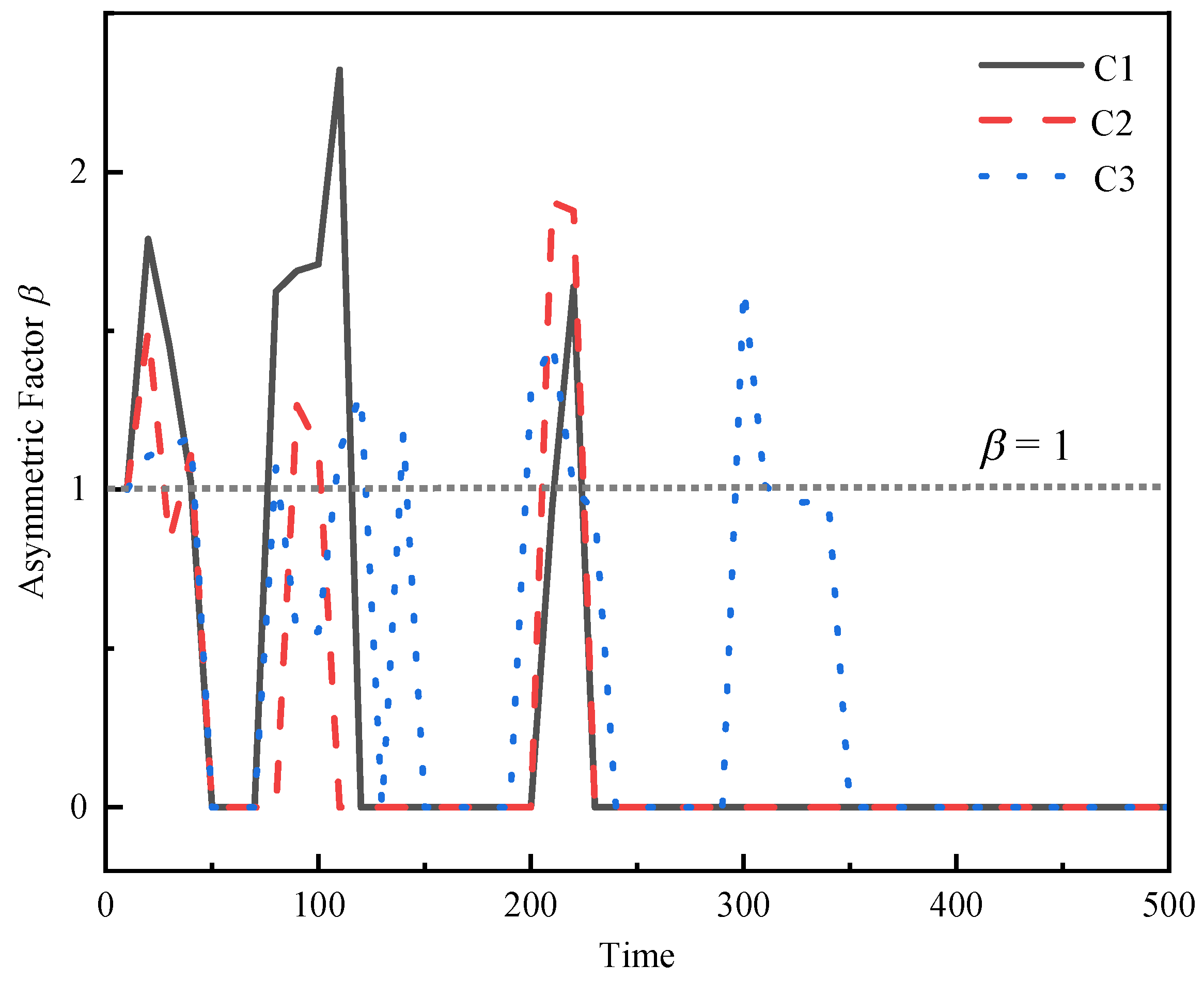
The spheroidal bubble (cases C1~C3) underwent 3~4 cycles of growth and collapse. As the bubble approached the free surface, its shape became less influenced by the solid wall. The maximum radius of the bubble decreased with each growth and collapse cycle, resulting in less fluctuation in the symmetrical coefficient. Ultimately, the bubble tended to become rounder in shape.
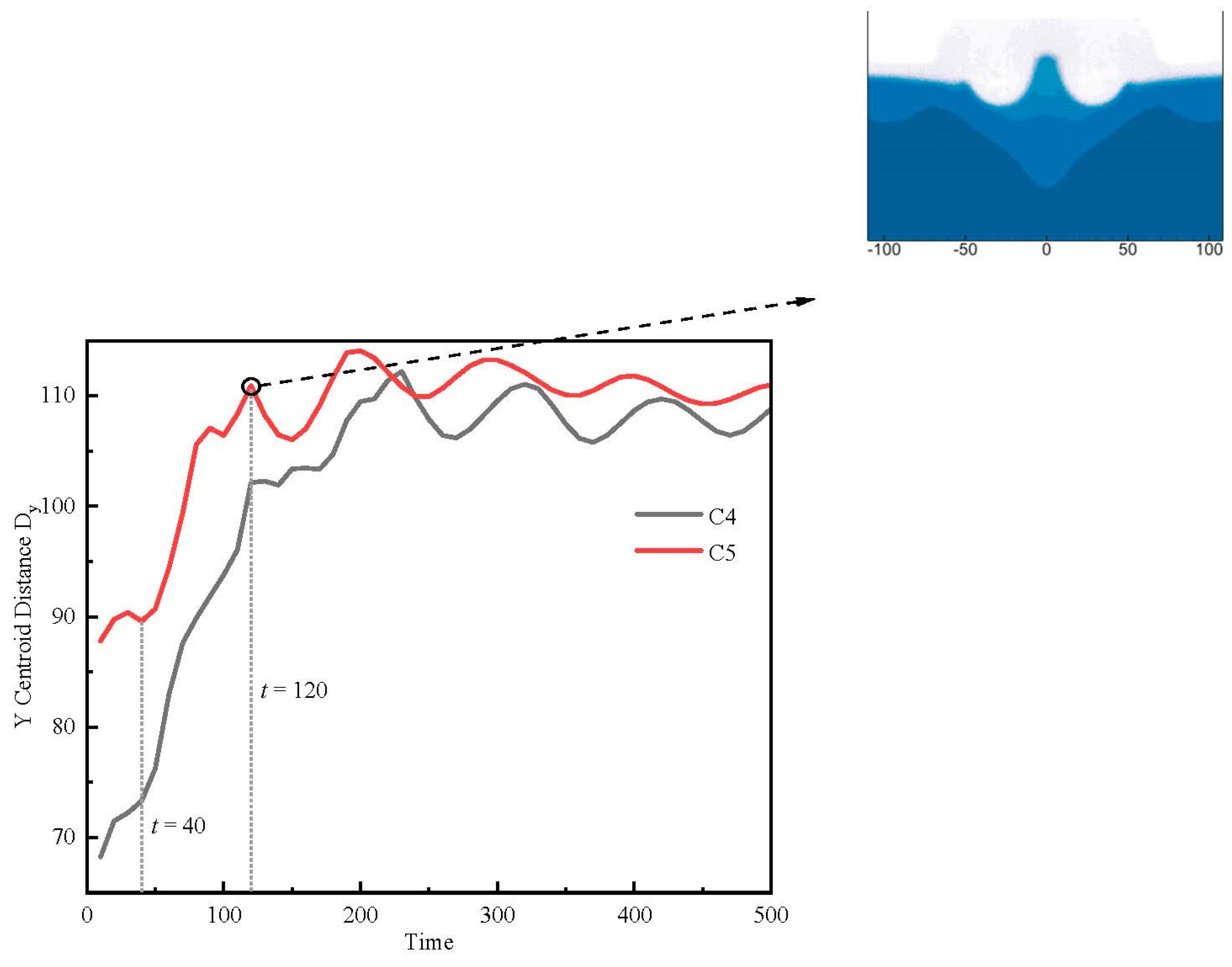
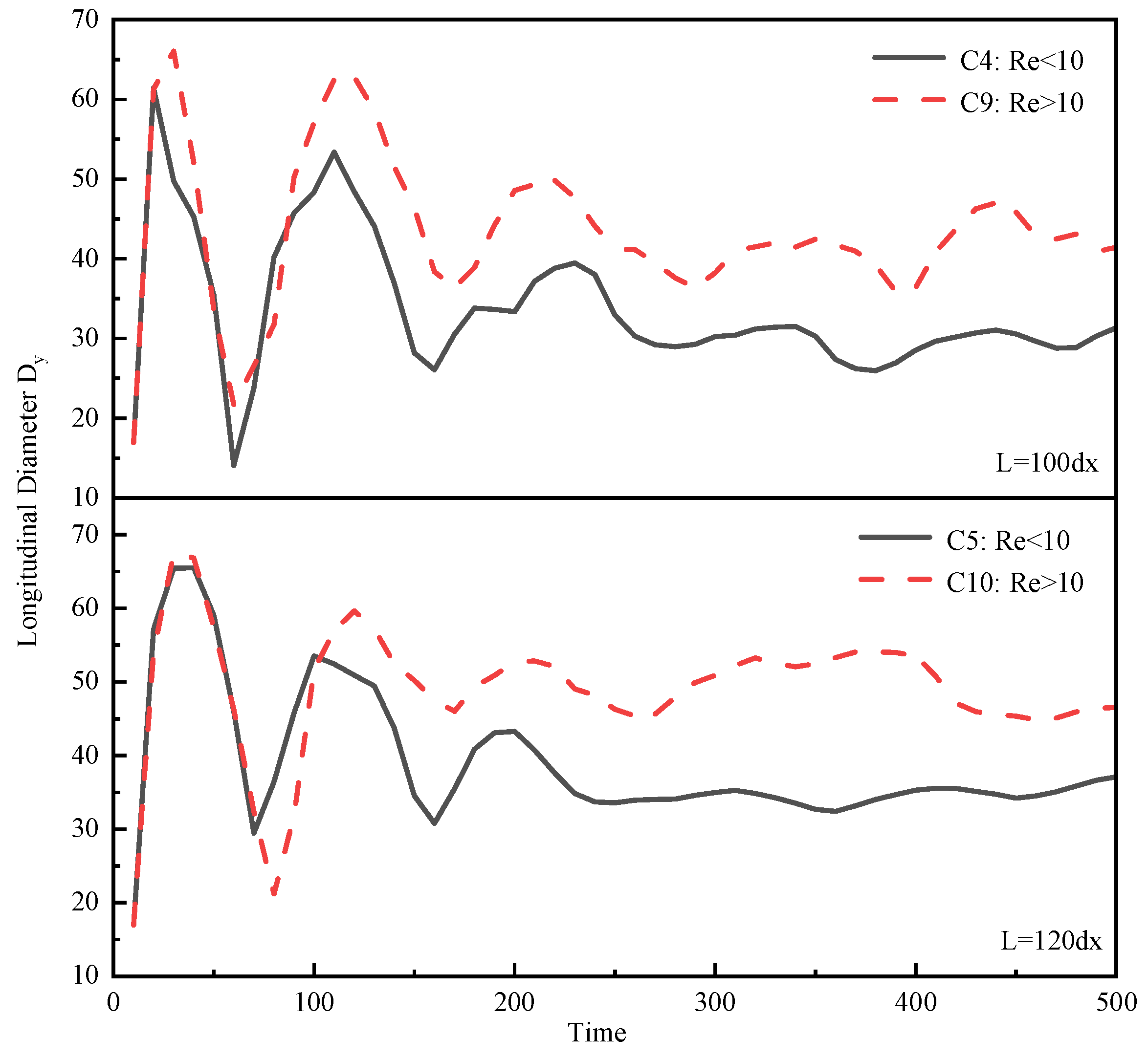
The jet bubble (cases C4~C5) experienced less gravitational potential energy loss as it approached the free surface, resulting in a faster upward movement of the bubble. This, in turn, led to a more prominent jet that occurred upon impact with the free liquid surface.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}