
Electric Vehicle Charging Load Prediction Model Considering Traffic Conditions and Temperature
Abstract
:1. Introduction
- (1)
- This study introduces the effects of traffic conditions and ambient temperature on EV electricity consumption into the field of EV charging load forecasting, which solves the problem of these two important factors of traffic conditions and ambient temperature being ignored in the modeling process of load forecasting and further improves the accuracy of electric vehicle charging load forecasting compared with previous modeling methods.
- (2)
- Proposed the shortest travel time as the goal of the path planning algorithm, according to the current driving section of the road class and traffic density dynamic planning route, so that the user can effectively avoid the shortest distance but the road speed limit is low and the road conditions for the congested road, more in line with the actual vehicle driving law.
- (3)
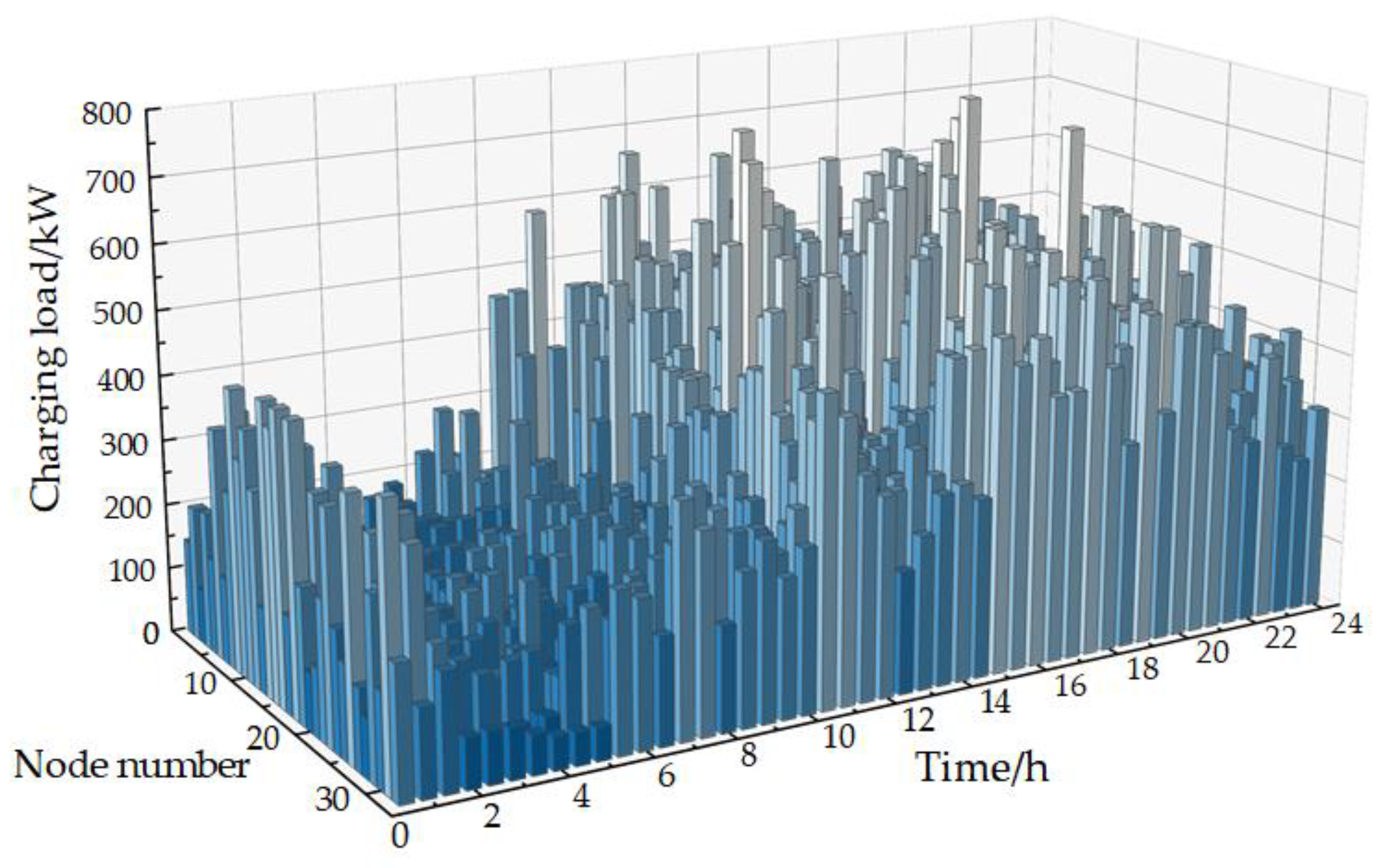
- The spatial–temporal distribution characteristics of electric vehicle charging load and its impact on the distribution network are analyzed to provide a basis for guiding the orderly charging of electric vehicles and the rational planning of the distribution network in the future.
2. Electric Vehicle Driving Characteristics Modeling
2.1. Initial Travel Time
2.2. Driving Distance
2.3. Parking Time
2.4. Initial State of Charge
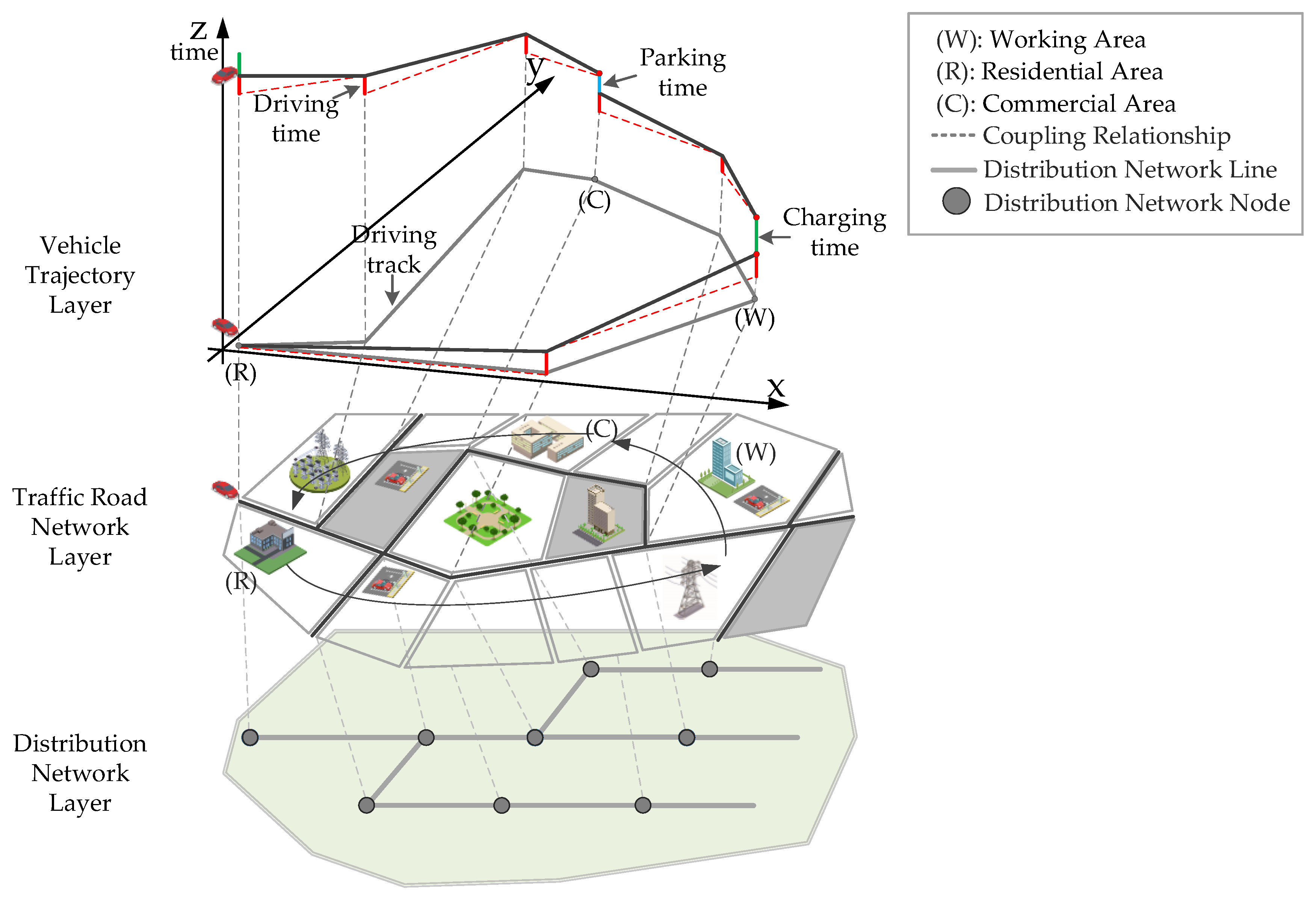
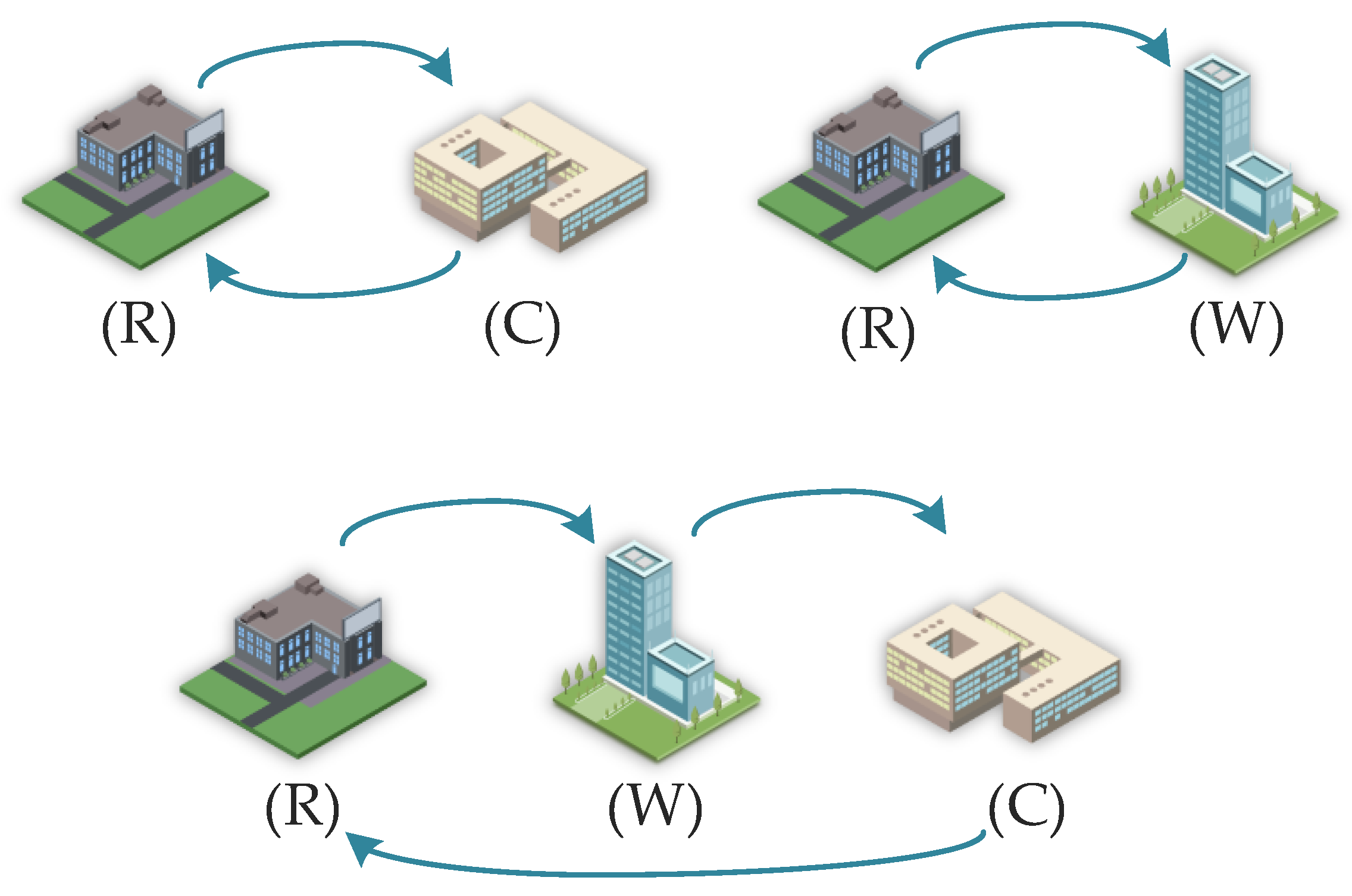
2.5. Travel Chain Model
3. Traffic Network and Distribution Network Modeling
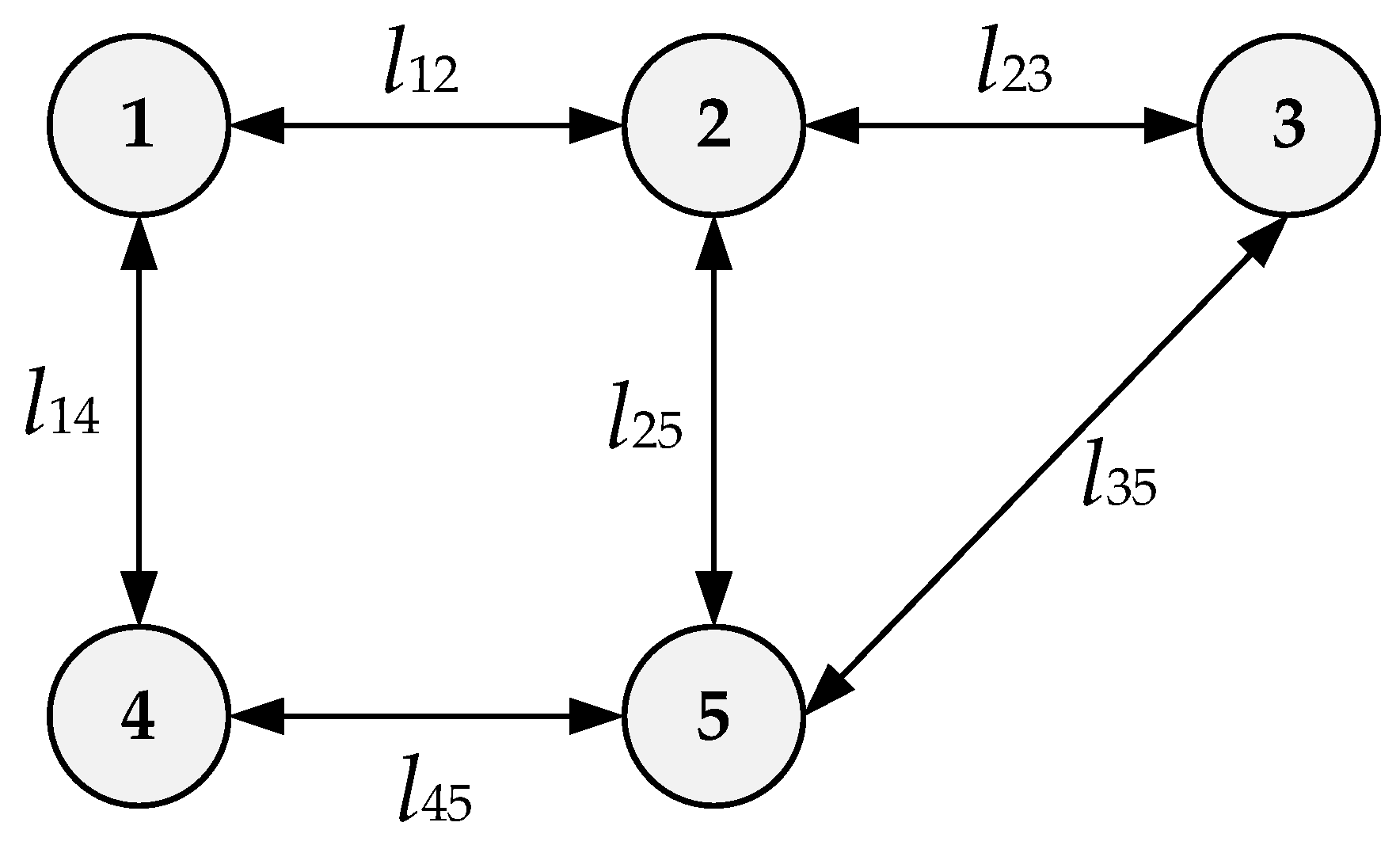
3.1. Traffic Network Topology
3.2. Improvement of Road Traffic Impedance Model
3.2.1. Improved Roadway Impedance Model
3.2.2. Improved Node Impedance Model
3.3. Path Selection Method
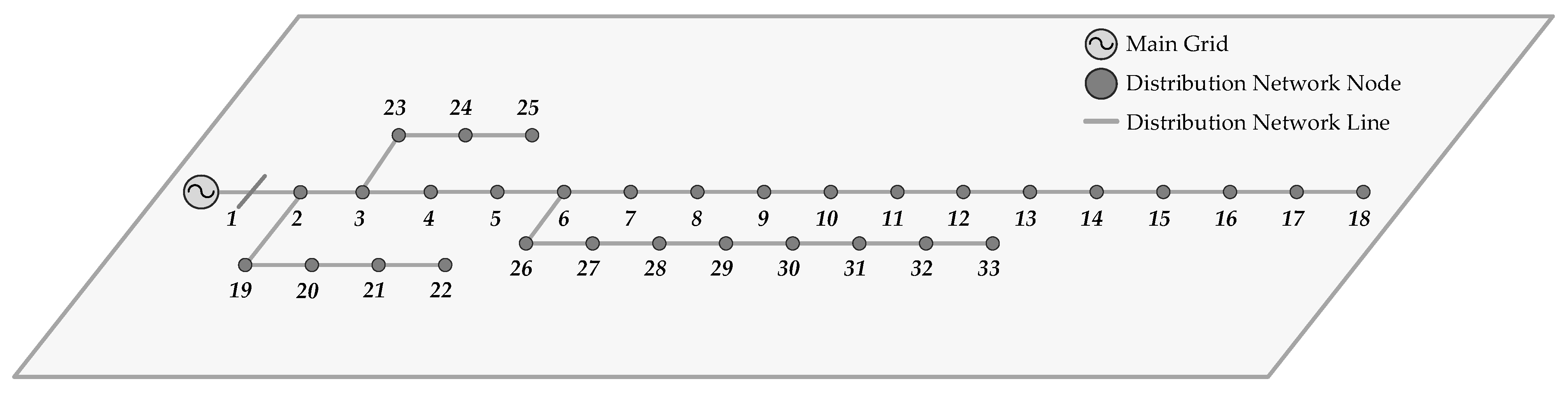
3.4. Regional Distribution Network Model
4. Electric Vehicle Charging Load Model
4.1. Model of Electric Vehicle Electricity Expenditure per Unit Kilometer Taking into Account Vehicle Speed and Temperature
4.1.1. Model Considering Road Conditions
4.1.2. Model of On-Board Air Conditioner Considering Temperature Effects
4.1.3. Model of Battery Losses in Electric Vehicles Considering Different Ambient Temperatures
4.1.4. Model of Electric Vehicle Electricity Expenditure Taking into Account Vehicle Speed and Temperature
4.2. Electric Vehicle Charging Method
4.3. Electric Vehicle Charging Load Calculation
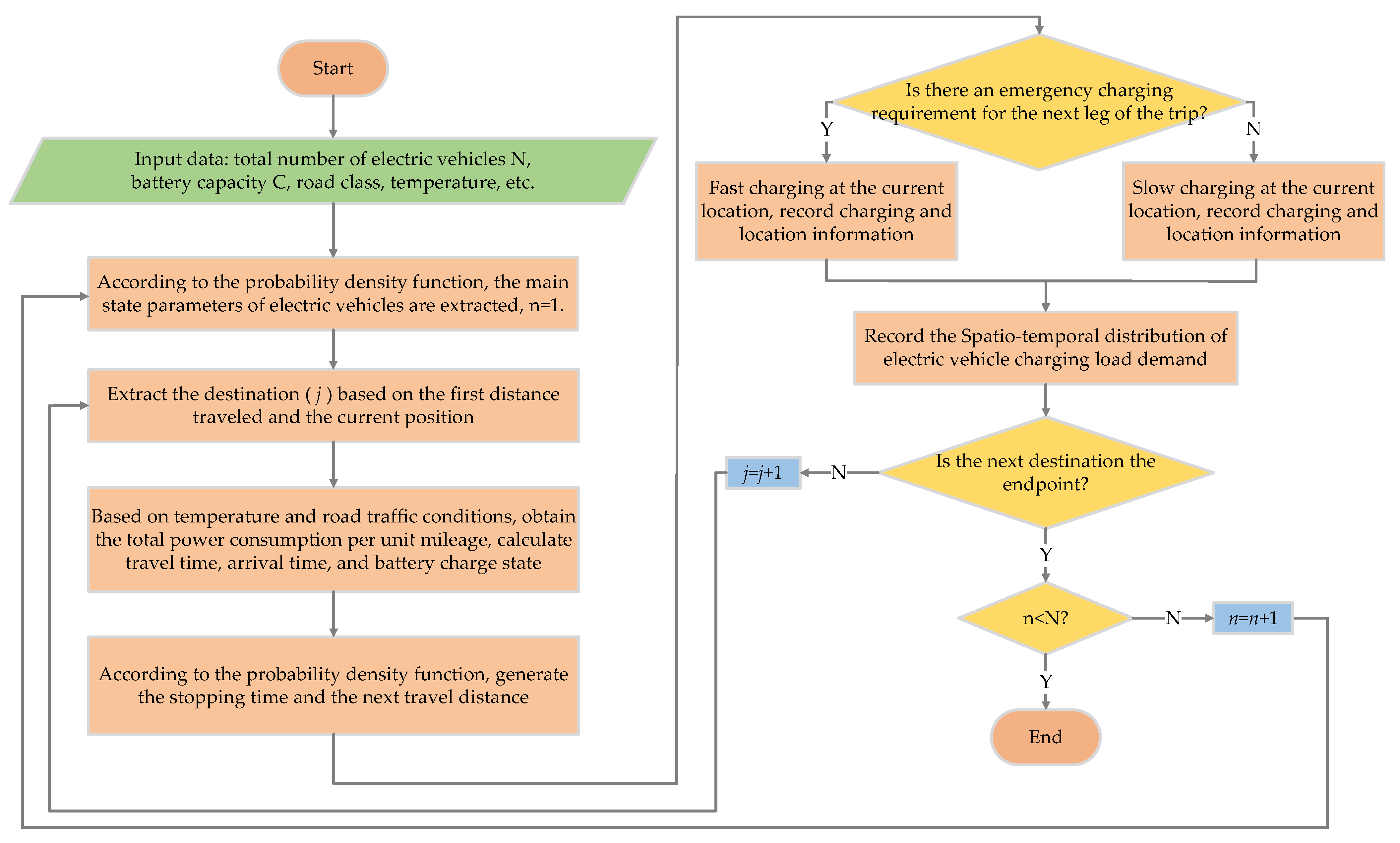
4.4. Load Forecasting Model Solving Process
5. Example Analysis
5.1. Simulation Parameter Setting
- (1)
- Considering the main sections of the region, there are 64 traffic nodes and 98 traffic sections;
- (2)
- The actual area is simply divided into three functional categories, namely, residential, working, and commercial areas;
- (3)
- Combined with the practical road traffic situation in China, the roads are divided into four types, as shown in Figure 6: the ring highway that is the green road with a set zero-flow speed of 100 km/h; the main trunk that is the yellow road with a set zero-flow speed of 60 km/h; the secondary main trunk that is the red road with a set zero-flow speed of 50 km/h; the branch way that is the blue road with a set zero-flow speed of 40 km/h;
- (4)
- It is assumed that there are a total of 2500 electric private cars in this area whose initial locations are evenly distributed around the residential areas.
5.2. Charging Load Forecast Results
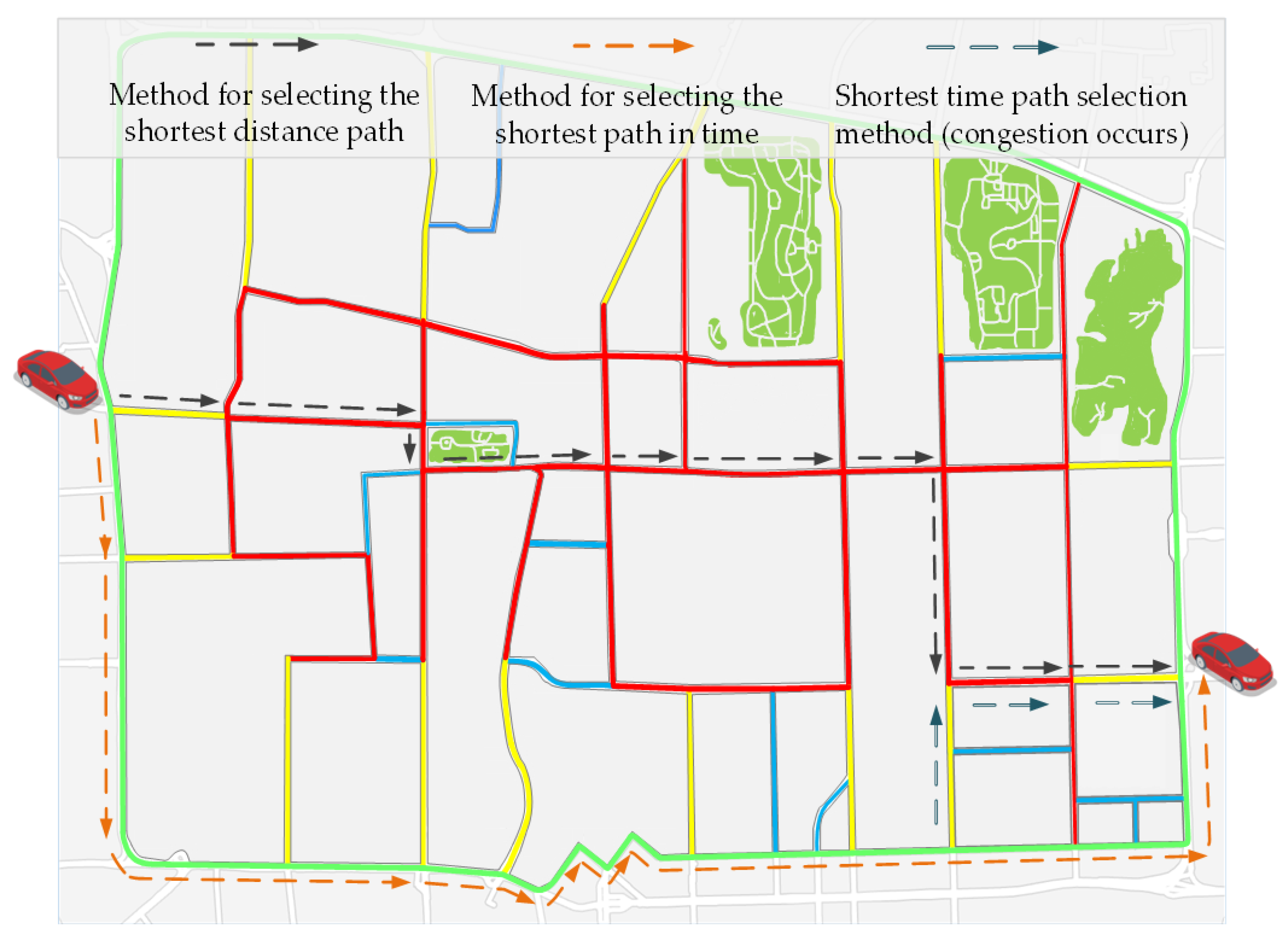
5.3. Path Selection Method
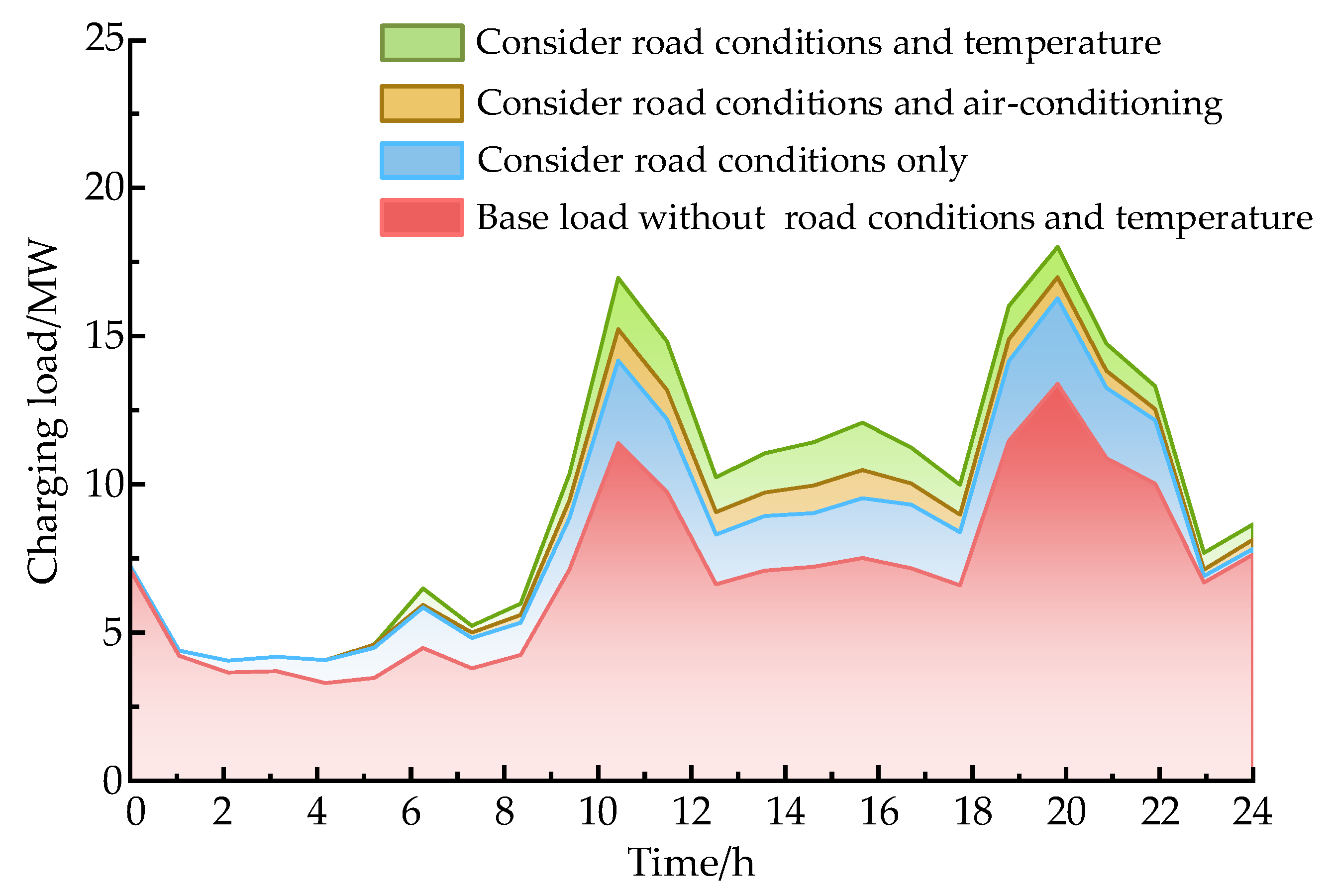
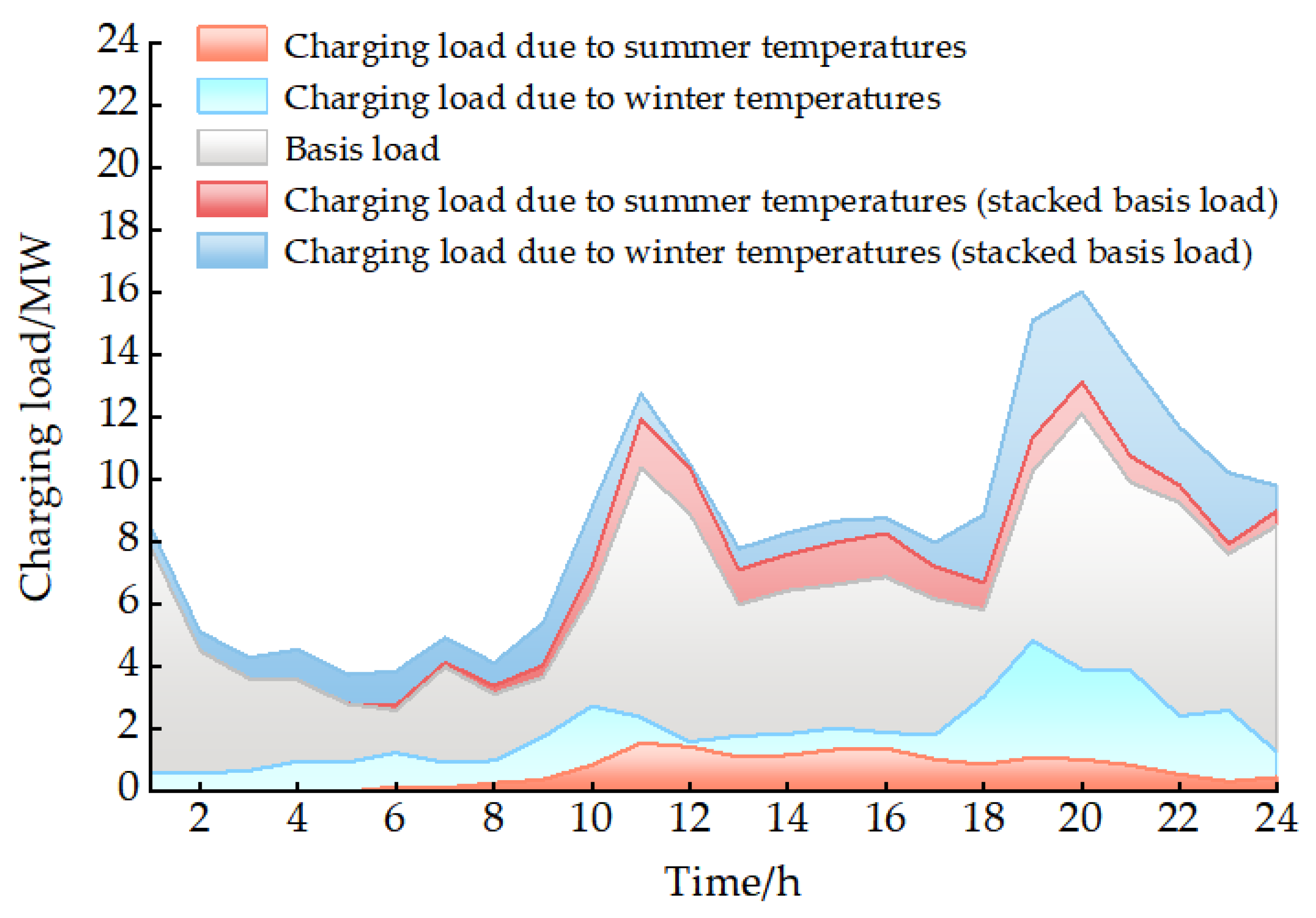
5.4. Consideration of the Impact of Traffic and Temperature Factors on the Charging Load
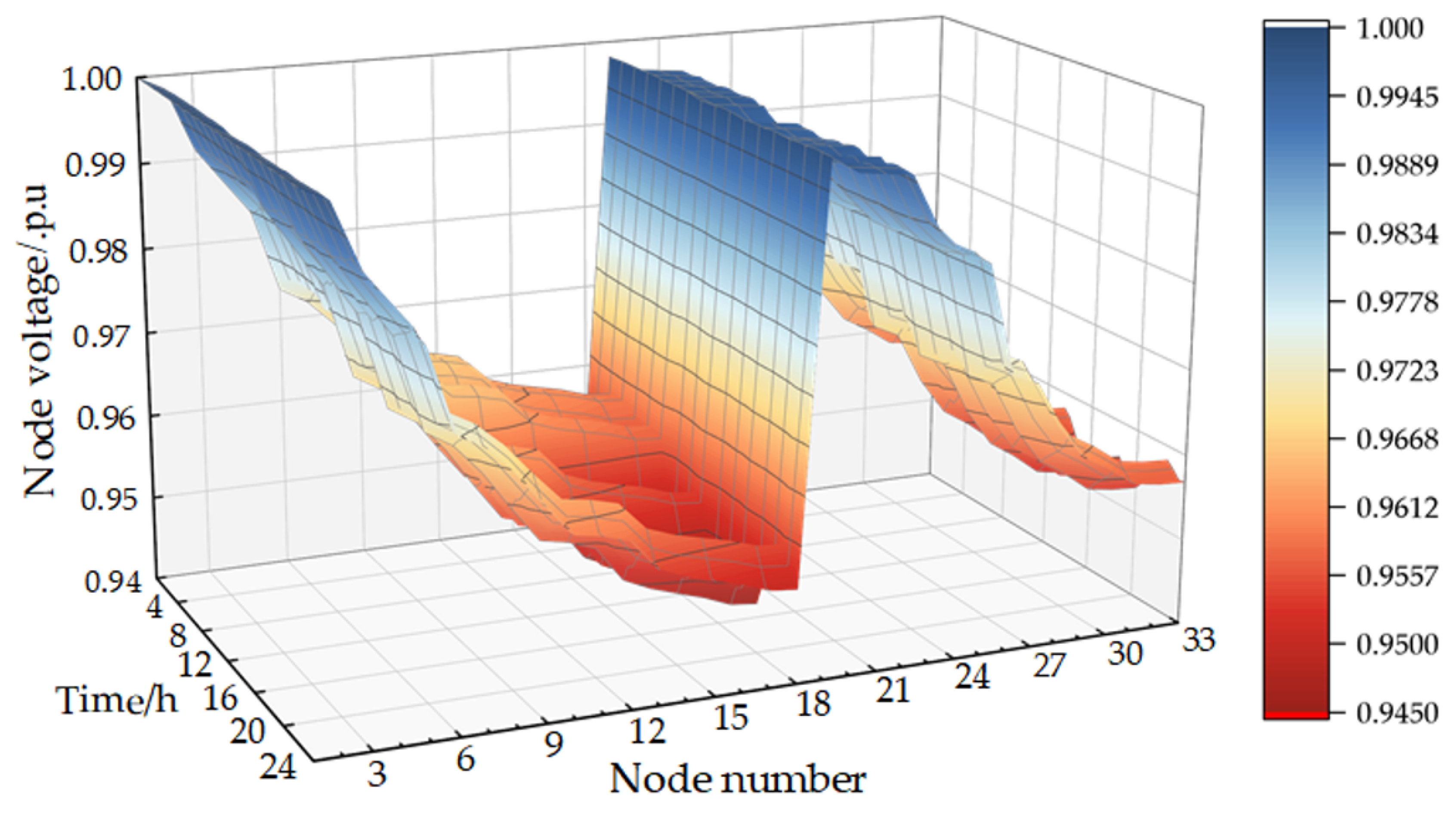
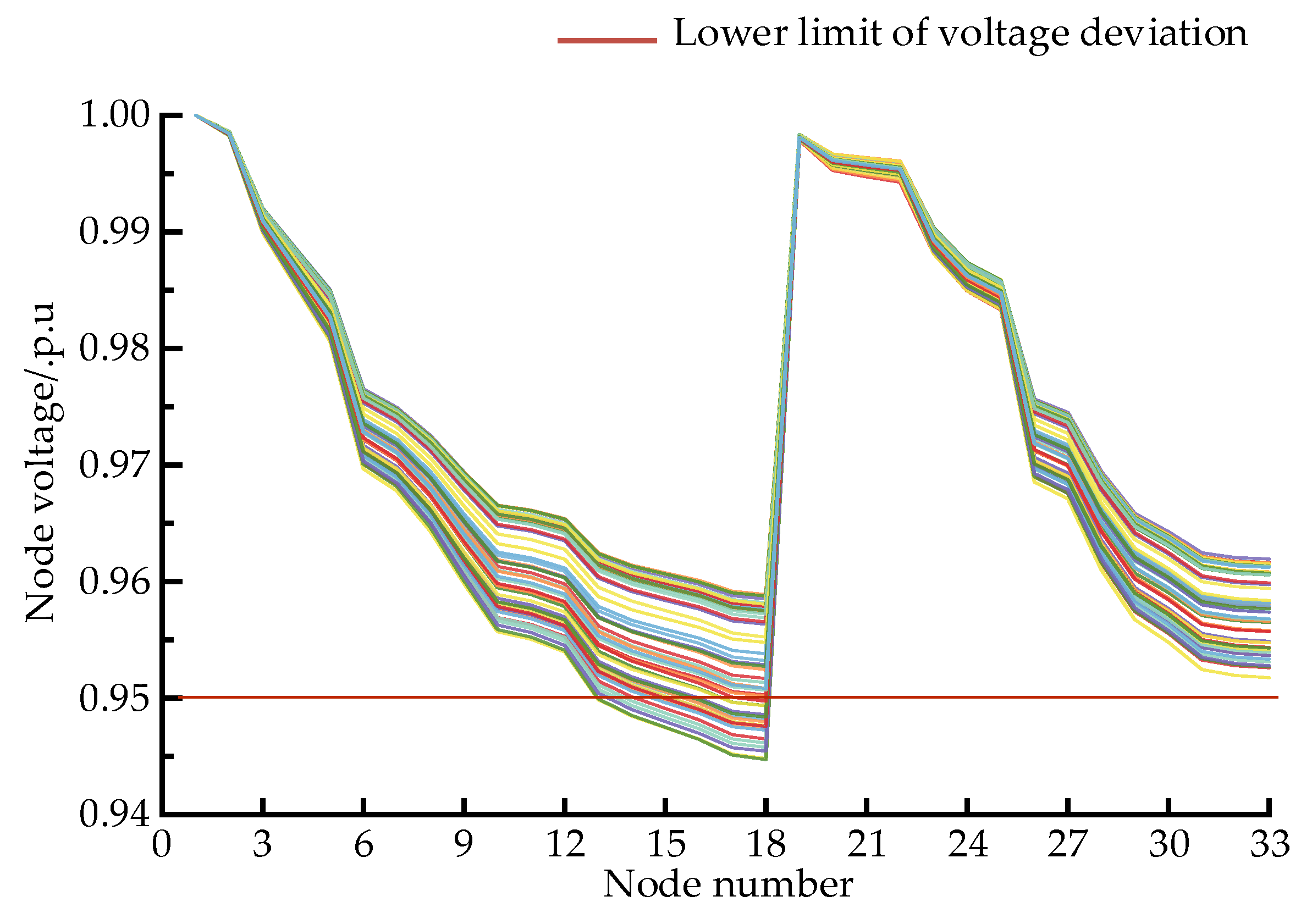
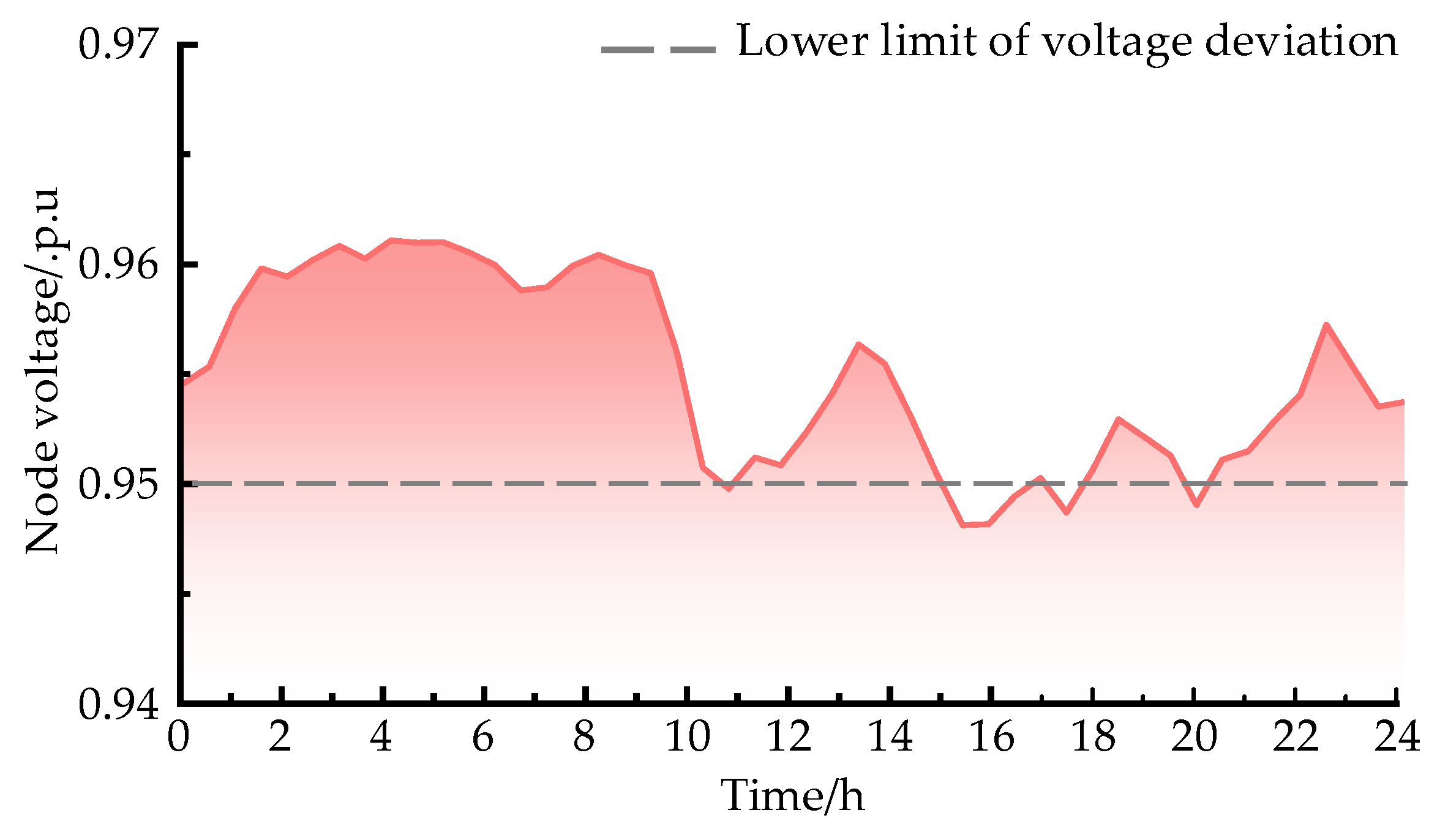
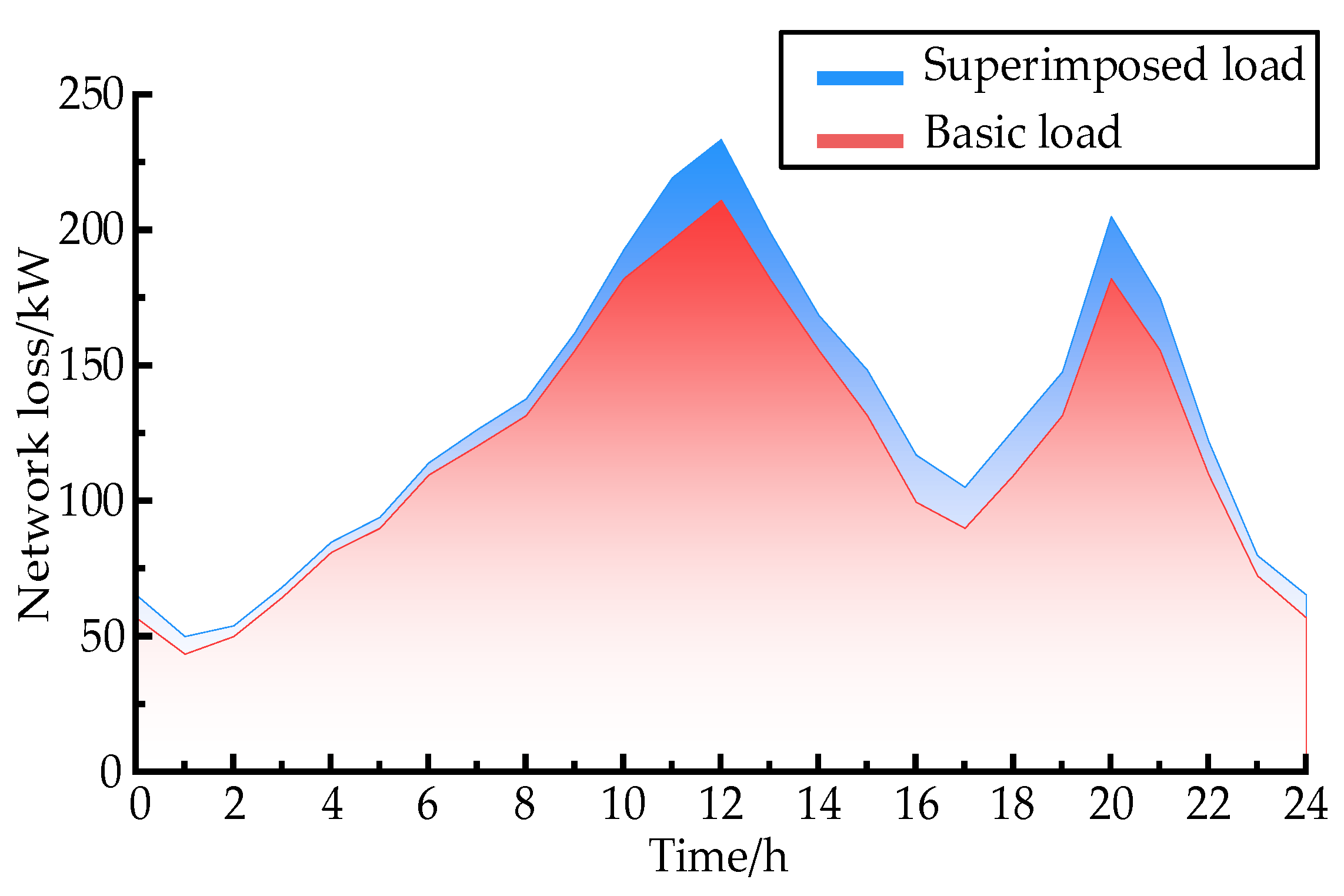
5.5. Analysis of the Impact of Uncontrolled Charging on the Distribution Network
6. Conclusions
- (1)
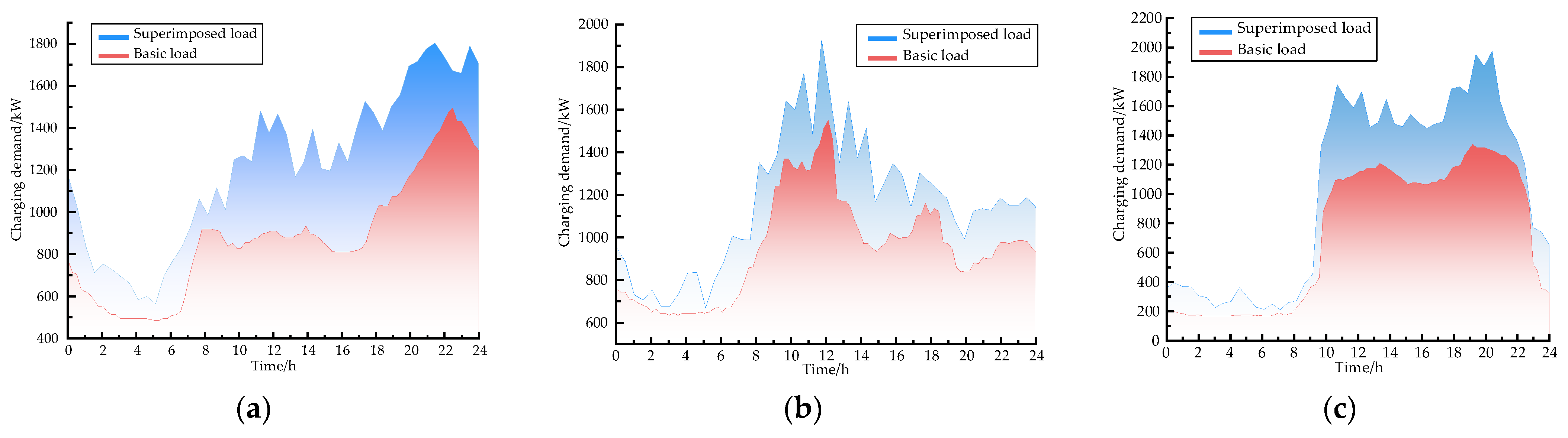
- The charging loads of different electric vehicles are obviously affected by the characteristics of functional areas, and there are obvious differences between the charging characteristics of different functional areas. The total charging load of electric vehicles has obvious “double-peak” characteristics, and, if not reasonably guided, it is superimposed on the peak value of the base load, resulting in an unfavorable impact;
- (2)
- Electric vehicle users tend to choose roads with high traffic levels and flat road conditions for route planning. In order to simulate user behavior more realistically, this paper uses an improved shortest path algorithm with road weights as the objective function to plan the driving paths of electric vehicles, which reduces the traveling time by 28.79% compared with the traditional shortest path algorithm;
- (3)
- Ambient temperature and traffic conditions have an impact on electric vehicle electricity consumption. In order to analyze the impact of these two factors on the charging load of electric vehicles, this paper introduces traffic conditions and ambient temperature in the modeling process, which can accurately obtain the actual electricity consumption of electric vehicles under different environmental conditions and improve the model prediction accuracy by 38.28% compared with the charging load prediction model which does not consider these two factors and provides a reasonable planning basis for the layout and capacity allocation of the distribution network.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tamba, M.; Krause, J.; Weitzel, M.; Lona, R.; Duboz, L.; Grosso, M.; Vandyck, T. Economy-wide impacts of road transport electrification in the EU. Technol. Forecast. Soc. Chang. 2022, 182, 121803. [Google Scholar] [CrossRef] [PubMed]
- Morfeldt, J.; Johansson, D.J.A. Impacts of shared mobility on vehicle lifetimes and on the carbon footprint of electric vehicles. Nat. Commun. 2022, 13, 6400. [Google Scholar] [CrossRef] [PubMed]
- General Office of the State Council of the People’s Republic of China. China’s New Energy Vehicle Holdings Reached 13.1 Million Units, Showing Rapid Growth. 2023. Available online: https://www.gov.cn/xinwen/2023-01/11/content_5736281.htm (accessed on 25 May 2023).
- Song, Y.; Lin, S. Spatial-temporal Distribution Prediction of Charging Load for Electric Vehicle based on Dynamic Traffic Flow. In Proceedings of the Joint 2019 International Conference on Ubiquitous Power Internet of Things (UPIOT 2019) & 2019 3rd International Symposium on Green Energy and Smart Grid (SGESG 2019), Chongqing, China, 21–23 August 2019. [Google Scholar]
- Yang, X.; Cai, Y.; Zhang, M.; Yang, X. Analysis of charging demand of household electric vehicles based on travel characteristics. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Chengdu, China, 21–24 May 2019. [Google Scholar]
- Jenn, A.; Highleyman, J. Distribution grid impacts of electric vehicles: A California case study. iScience 2021, 25, 103686. [Google Scholar] [CrossRef] [PubMed]
- U.S. Department of Transportation Federal Highway Administration. 2017 National Household Travel Survey; U.S. Department of Transportation Federal Highway Administration: Washington, DC, USA, 2017. [Google Scholar]
- Su, S.; Hui, Y.; Ning, D.; Li, P. Spatial-Temporal Distribution Model of Electric Vehicle Charging Demand Based on a Dynamic Evolution Process. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018. [Google Scholar]
- Qian, T. Calculation of Electric Vehicle Charging Power Based on Spatial-Temporal Activity Model. In Proceedings of the 2018 China International Conference on Electricity Distribution (CICED), Tianjin, China, 17–19 September 2018. [Google Scholar]
- Zhang, J.; Yan, J.; Liu, Y.; Zhang, H.; Lv, G. Daily electric vehicle charging load profiles considering demographics of vehicle users. Appl. Energy 2020, 274, 115063. [Google Scholar] [CrossRef]
- Yi, T.; Zhang, C.; Lin, T.; Liu, J. Research on the spatial-temporal distribution of electric vehicle charging load demand: A case study in China. J. Clean. Prod. 2020, 242, 118457. [Google Scholar] [CrossRef]
- Zhang, M.; Cai, Y.; Yang, X. Charging demand distribution analysis method of household electric vehicles considering users’ charging difference. Electr. Power Autom. Equip. 2020, 40, 154–163. [Google Scholar]
- Shao, Y.; Mu, Y.; Yu, X.; Dong, X.; Jia, H.; Wu, J.; Zeng, Y. A spatial-temporal charging load forecast and impact analysis method for distribution network using EVs-traffic-distribution model. Proc. CSEE Smart Grid 2017, 37, 5207–5219. [Google Scholar]
- Chen, L.; Zhang, Y.; Figueiredo, A. Spatio-Temporal Model for Evaluating Demand Response Potential of Electric Vehicles in Power-Traffic Network. Energies 2019, 12, 1981. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Zhang, Q.; Zhu, Y. Spatial-temporal distribution prediction of charging loads for electric vehicles considering vehicle-road-station-grid integration. Autom. Electr. Power Syst. 2022, 46, 36–45. [Google Scholar]
- Mostafa, A.; Mohammad, R.; Mohamad, A. A novel spatial-temporal model for charging plug hybrid electrical vehicles based on traffic-flow analysis and Monte Carlo method. ISA Trans. 2021, 114, 263–276. [Google Scholar]
- Yan, J.; Zhang, J.; Liu, Y.; Lv, G.; Han, S.; Alfonzo, L.E.G. EV charging load simulation and forecasting considering traffic jam and weather to support the integration of renewables and EVs. Renew. Energy 2020, 159, 623–641. [Google Scholar] [CrossRef]
- Tang, S.; Mu, Y.; Zhou, Y.; Dong, X.; Jia, H. A Spatial-temporal Electric Vehicle Charging Load Forecasting Method Considering the Coordination among the Multiple Charging Behaviors. In Proceedings of the 2021 Power System and Green Energy Conference (PSGEC), Shanghai, China, 13–16 May 2021. [Google Scholar]
- Wang, H.; Zhang, Y.; Mao, H. Charging load forecasting method based on instantaneous charging probability for electric vehicles. Electr. Power Autom. Equip. 2019, 39, 207–213. [Google Scholar]
- Liu, N.; Zhao, S.C.; He, N. Study of the road resistance function based on BPR function. J. Wuhan Univ. Technol. Transp. Sci. Eng. 2013, 37, 545–548. [Google Scholar]
- Yu, T.; Ma, J. A review of the link traffic time estimation of urban traffic. In Proceedings of the 2016 IEEE International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 20–22 August 2016. [Google Scholar]
- Zhang, Y.; Chen, Y.; Qi, S. Model of controlled intersection turning delay based on probabilistic principle. J. Jilin Univ. 2020, 50, 2113–2121. [Google Scholar]
- Perger, T.; Auer, H. Energy efficient route planning for electric vehicles with special consideration of the topography and battery lifetime. Energy Effic. 2020, 13, 1705–1726. [Google Scholar] [CrossRef]
- Weiss, M.; Ruess, R.; Kasnatscheew, J.; Levartovsky, Y.; Levy, N.R.; Minnmann, P.; Stolz, L.; Waldmann, T.; Wohlfahrt-Mehrens, M.; Aurbach, D.; et al. Fast Charging of Lithium-Ion Batteries: A Review of Materials Aspects. Adv. Energy Mater. 2021, 11, 2101126. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trip Chain Form | Specific Gravity/% |
|---|---|
| 23.1 | |
| 52.8 | |
| 24.1 |
| Path Selection Type | Path Length/km | Total Time/h |
|---|---|---|
| Shortest distance (open) | 35 | 0.764 |
| Shortest time (open) | 47.3 | 0.544 |
| Shortest time (congestion occurs) | 47.3 | 0.679 |
| Shortest time (change of path) | 46 | 0.646 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, J.; Chang, X.; Fan, Y.; Luo, W. Electric Vehicle Charging Load Prediction Model Considering Traffic Conditions and Temperature. Processes 2023, 11, 2256. https://doi.org/10.3390/pr11082256
Feng J, Chang X, Fan Y, Luo W. Electric Vehicle Charging Load Prediction Model Considering Traffic Conditions and Temperature. Processes. 2023; 11(8):2256. https://doi.org/10.3390/pr11082256
Chicago/Turabian StyleFeng, Jiangpeng, Xiqiang Chang, Yanfang Fan, and Weixiang Luo. 2023. "Electric Vehicle Charging Load Prediction Model Considering Traffic Conditions and Temperature" Processes 11, no. 8: 2256. https://doi.org/10.3390/pr11082256