
A Two-Stage Optimal Preventive Control Model Incorporating Transient Stability Constraints in the Presence of Multi-Resource Uncertainties

Abstract
:1. Introduction
- Modeling the uncertainty: Reference [4] focuses on modeling the uncertainty of wind and solar energy, mainly by adopting the Burr distribution model [5], Weibull distribution model [6], Gamma distribution model [7], etc. The Weibull distribution model has been widely used due to its simple principles and convenience in calculation. In addition, the structure of a power grid can also be impacted by unexpected faults. The uncertainty of the occurrence of faults is analyzed from three aspects: fault type, fault location, and recovery time. In existing works, the uncertainty of fault types is described with discrete probability distribution models [8], and the uncertainty of fault recovery time is usually described with a normal distribution [9]. Similarly, the load uncertainty, mainly caused by the fluctuation of active power injected into the node, can be described by a normal distribution [10]. In the literature, random samples are usually generated via Monte Carlo sampling simulations [11] and Latin hypercube sampling simulations [12], and the generated scenarios are reduced using clustering methods such as the k-means method.
- Building preventive control model: Non-anticipative changes on grid components and the aroused redistribution of currents can destabilize the system. Preventive control prevents possible system instability by adjusting the current operation status with the cost of a higher operating cost. References [13,14,15,16,17] studied preventive control strategies on hourly time basis. The difference between these models is mainly their objectives, which can be roughly divided into three categories: eco-nomic cost minimization [13]; reliability maximization [14,15]; and joint economy and reliability [16,17]. Reference [18] mainly studies the online preventive control and proposes a method for safety and stability control considering large-scale wind energy. However, preventive control is indeed a multi-timescale problem that is solved at different time scales step by step. Therefore, it is reasonable to build the prevention and control model in two parts, namely, preventive control and emergency control.
- Solving methodology: A optimization model can be cast as a given programming problem, such as mixed integer linear programming (MILP), and then solved with commercial solvers. On one hand, this methodology usually requires linearization of the original model which is originally nonlinear and nonconvex; on the other hand, for large-scale problems, the computational burden is heavy and sometimes unacceptable. Intelligent algorithms, such as particle swarm optimization algorithms [19] and grey wolf algorithms [20], are wildly used in solving complicated optimization model in recent years. The advantage is that they can be applied to different models without additional processing, but their solution stability is expected to be further improved.
- (1).
- The paper proposes a two-stage optimal preventive control model that incorporates transient stability constraints and addresses the challenges aroused by the volatility of renewable energy resources.
- (2).
- The non-sequential Monte Carlo-based scenario generation method is used to simulate the uncertainties introduced by multiple resources. This provides a complete under-standing of the system’s behavior and enhances the reliability of decisions in grid operation.
- (3).
- An improved multi-objective particle swarm algorithm (IMOSPO) based on entropy-TOPSIS is proposed to efficiently solve the proposed model.
2. Probability-Based Uncertainty Models
2.1. Modeling the Uncertainty of System Components
2.1.1. Modeling the Uncertainty of Generation Units
2.1.2. Modeling the Uncertainty of the Grid
Probability Distribution of the Fault Type
Probability Distribution of the Fault Location
Probability Distribution of the Recovery Time
2.1.3. Uncertainty Modeling of Load
2.2. Non-Sequential Monte Carlo Based Scenarios Generation Method
3. The Two-Stage Optimal Preventive Control Model
3.1. Model of Preventive Control Stage
3.1.1. Objective Function
3.1.2. Constraints
- (1)
- System operation constraints
- (2)
- Constraints of energy storage
- (3)
- Constraints of generation units
- (4)
- Transient process constraints
- (5)
- Transient stability constraint
- Instability condition: Synchronous machine equivalent electromagnetic power and mechanical power in transient equilibrium are shown in (41). The bias of their difference is greater than 0 and tends to become larger, as shown in (42). So, it is difficult for the system to achieve dynamic equilibrium.
- Stability condition: When the system reaches the maximum swing angle, the system’s equivalent angular velocity decelerates to 0, as shown in (44). The mechanical power of the system becomes less than the electromagnetic power, so the system will reach dynamic equilibrium, as shown in (45). The stability margin can be calculated as in (43)–(45):
3.2. Emergency Control Stage Model
3.2.1. Objective Function
3.2.2. Constraints
4. Solution Method
4.1. Initialization
4.2. Particle Update
4.3. Fitness Function and Optimal Solution Construction
- (1)
- Obtain the original indicator data matrix based on sample data. Let a matrix with n-dimensional objective function and Pareto solutions be ; then, standardize it to obtain a new matrix :where is the maximum value of all evaluation data of index ; and is the minimum value of all evaluation data of index . The gain index indicates that the larger the value, the better the index. The cost index is the opposite.
- (2)
- Obtain the evaluation indicator and entropy of samples; then, obtain the information redundancy value based on the information entropy, as follows:
- (3)
- Finally, calculate the weight of each index according to the information entropy:
- (4)
- Standardize the decision matrix to obtain the normalized attribute value of the original scheme and introduce the weight vector obtained via the entropy weight method:
- (5)
- Determine the optimal solution and worst solution :
- (6)
- Calculate the distance from each scheme to the optimal solution and the worst solution in (74) and (75); then, calculate the relative proximity of each scheme to the ideal solution according to Formula (75):
5. Case Study
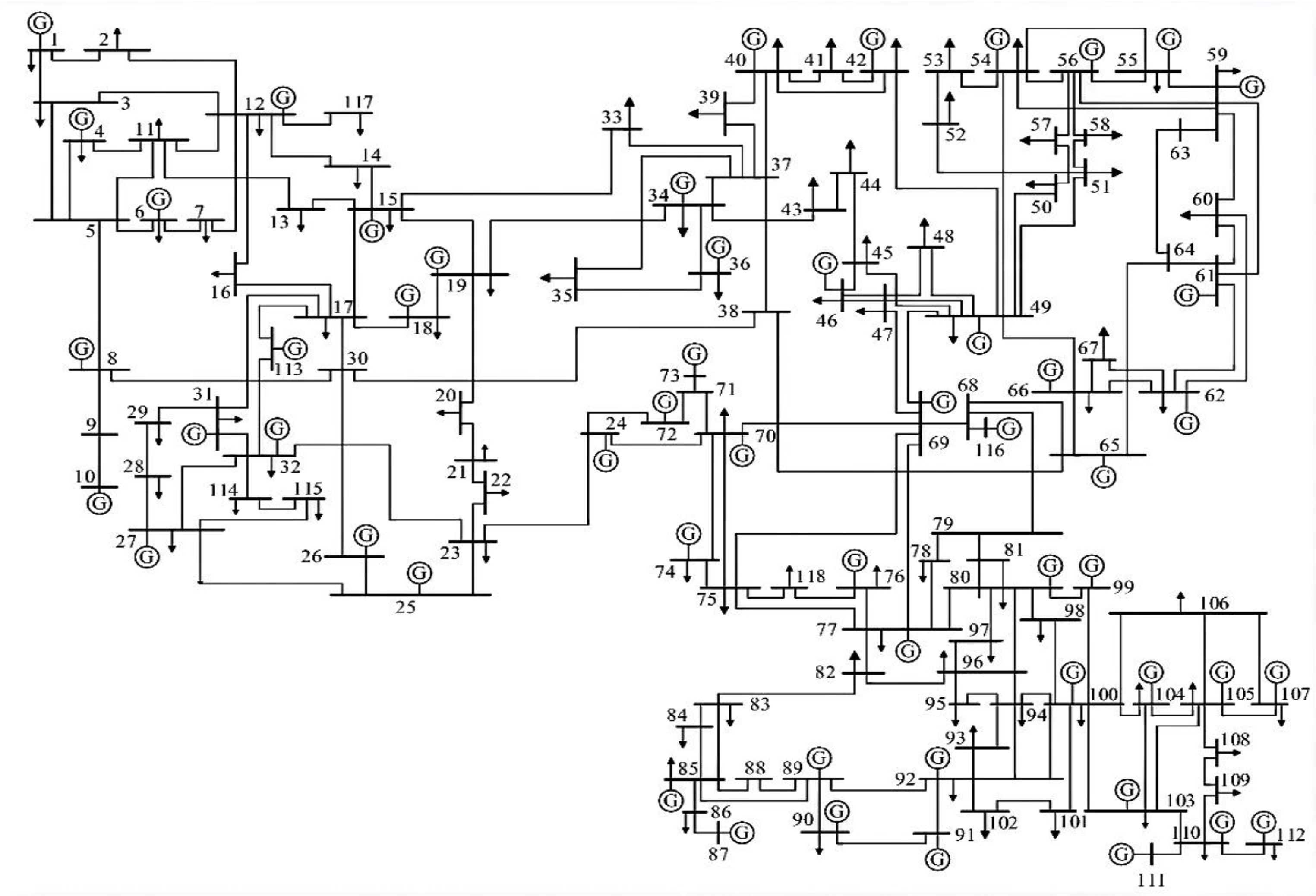
5.1. System Discerption
- (1)
- The nodal load power is assumed to follow a normal distribution with a mean value given by the provided standard data and a variance of ±10%. The load correlation coefficient of the connected node is set to 0.15.
- (2)
- The cut-in, cut-out, and rated wind speeds of wind turbines are, respectively, set as 3 m/s, 25 m/s, and 12 m/s.
- (3)
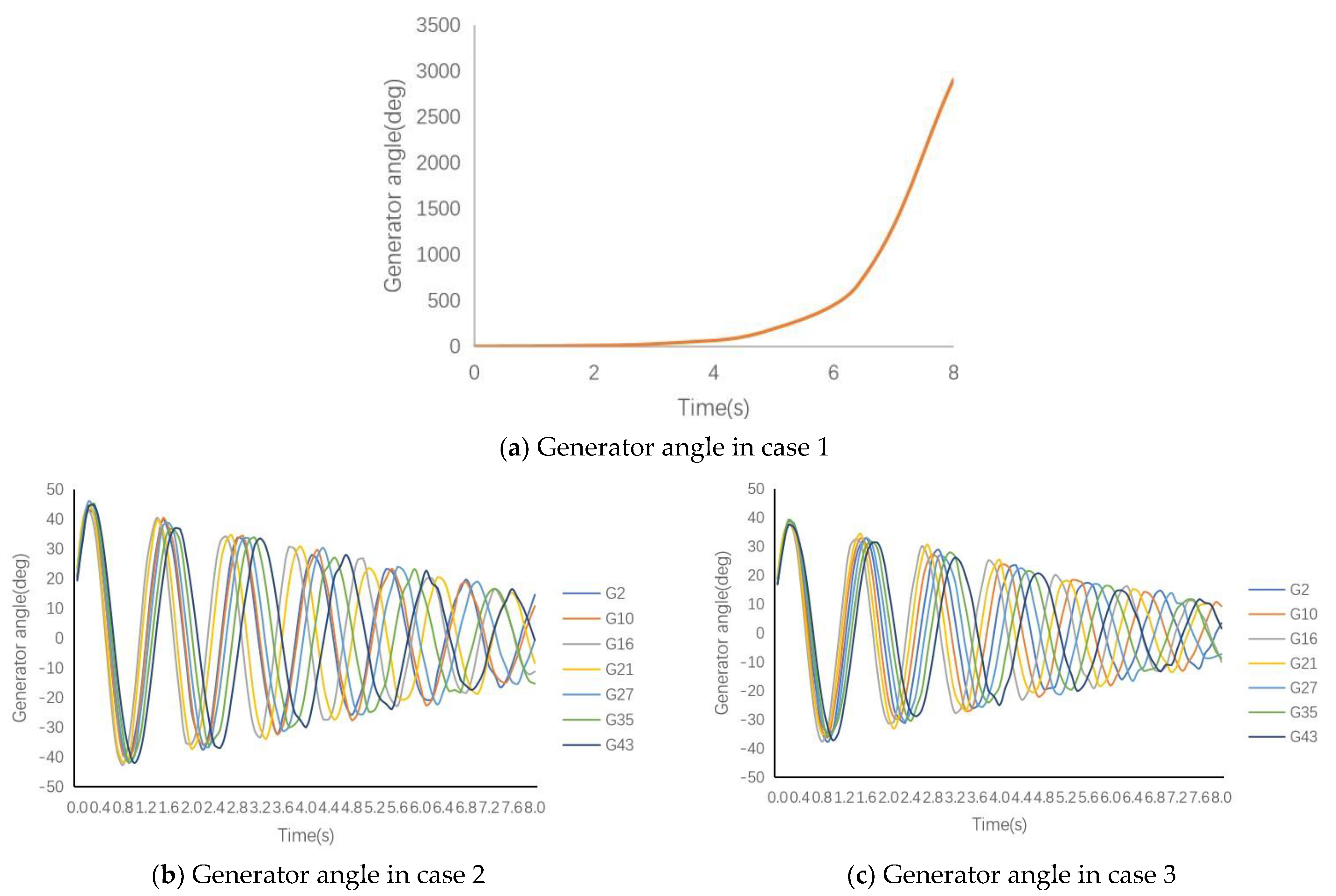
- Case 1: Reserve and energy storage systems are not considered;
- Case 2: Only reserve from generation units is considered (energy storage systems are not considered);
- Case 3: Reserve from both generation units and energy storage systems are considered.
5.2. Optimization Results
5.2.1. Analysis before Failure
5.2.2. Analysis on Single Failure
5.2.3. Analysis on Multiple Faults
5.2.4. Algorithm Comparison
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A



References
- Chen, G.; Dong, Y.; Liang, Z. Analysis and reflection on high-quality development of new energy with Chinese characteristics in energy transition. Proc. CSEE 2020, 40, 5493–5506. [Google Scholar]
- Zhang, N.; Hu, Z.; Han, X.; Zhang, J.; Zhou, Y. A fuzzy chance-constrained program for unit commitment problem considering demand response, electric vehicle and wind power. Int. J. Electr. Power Energy Syst. 2015, 65, 201–209. [Google Scholar] [CrossRef]
- Wong, W.C.; Chung, C.Y.; Chan, K.W.; Chen, H. Quasi-Monte Carlo based probabilistic small signal stability analysis for power systems with plug-in electric vehicle and wind power integration. IEEE Trans. Power Syst. 2013, 28, 3335–3343. [Google Scholar] [CrossRef]
- Hasan, K.N.; Preece, R.; Milanović, J.V. Existing approaches and trends in uncertainty modelling and probabilistic stability analysis of power systems with renewable generation. Renew. Sustain. Energy Rev. 2018, 101, 168–180. [Google Scholar] [CrossRef]
- Indhumathy, D.; Narmatha, D.; Meenambika, K. Mixture Weibull probabilistic model in Wind Turbine Power Analysis. J. Phys. Conf. Ser. 2021, 1916, 012109. [Google Scholar] [CrossRef]
- Alrashidi, M. Estimation of Weibull Distribution Parameters for Wind Speed Characteristics Using Neural Network Algorithm. Comput. Mater. Contin. 2023, 75, 1073–1088. [Google Scholar] [CrossRef]
- Xie, G.-L.; Zhang, B.-H.; Li, Y.; Mao, C.-X. Harmonic propagation and interaction evaluation between small-scale wind farms and nonlinear loads. Energies 2013, 6, 3297–3322. [Google Scholar] [CrossRef] [Green Version]
- Faried, S.; Billinton, R.; Aboreshaid, S. Probabilistic evaluation of transient stability of a power system incorporating wind farms. IET Renew. Power Gener. 2010, 4, 299–307. [Google Scholar] [CrossRef]
- Fang, D.; Jing, L.; Chung, T. Corrected transient energy function-based strategy for stability probability assessment of power systems. IET Gener. Transm. Distrib. 2008, 2, 424–432. [Google Scholar] [CrossRef]
- Mele, F.M.; Zarate-Minano, R.; Milano, F. Modeling Load Stochastic Jumps for Power Systems Dynamic Analysis. IEEE Trans. Power Syst. 2019, 34, 5087–5090. [Google Scholar] [CrossRef]
- Ye, S.; Xiaoru, W.; Shu, Z. Power system probabilistic transient stability assessment based on Markov Chain Monte Carlo method. Trans. China Electrotech. Soc. 2012, 27, 168–174. [Google Scholar]
- Saraninezhad, M.; Ramezani, M.; Falaghi, H. Probabilistic Assessment of Wind Turbine Impact on Distribution Networks by Using Latin Hypercube Sampling Method. In Proceedings of the 2022 9th Iranian Conference on Renewable Energy & Distributed Generation (ICREDG), Mashhad, Iran, 23–24 February 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Yan, Y.; Sun, N.; Zhang, N. Evaluation of unavailability risk of the security and stability control system of power systems based on optimization of the preventive maintenance period. Power Syst. Prot. Control. 2021, 49, 139–146. [Google Scholar]
- Peng, Y.; Dong, X.; Zhou, H. Reliability evaluation of power grid security and stability control system. Power Syst. Prot. Control. 2020, 48, 123–131. [Google Scholar]
- Li, X.; Zhou, S.; Xu, X.; Lin, L.; Wang, D. The Reliability Analysis Based on Subsystems of $(n, k) $-Star Graph. IEEE Trans. Reliab. 2016, 65, 1700–1709. [Google Scholar] [CrossRef]
- Etemadi, A.H.; Fotuhi-Firuzabad, M. Design and routine test optimization of modern protection systems with reliability and economic constraints. IEEE Trans. Power Deliv. 2011, 27, 271–278. [Google Scholar] [CrossRef]
- Wang, Q.; Martinez-Anido, C.B.; Wu, H.; Florita, A.R.; Hodge, B.-M. Quantifying the economic and grid reliability impacts of improved wind power forecasting. IEEE Trans. Sustain. Energy 2016, 7, 1525–1537. [Google Scholar] [CrossRef]
- Bao, Y.; Zhang, J.; Yi, L.; Xu, T.; Ren, X.; Wu, F. Prevention and Control Method of Security and Stability Risk for Power System with Large-scale Wind Power Integration. Autom. Electr. Power Syst. 2022, 46, 187–194. [Google Scholar]
- Parvin, M.; Yousefi, H.; Noorollahi, Y. Techno-economic optimization of a renewable micro grid using multi-objective particle swarm optimization algorithm. Energy Convers. Manag. 2023, 277, 116639. [Google Scholar] [CrossRef]
- Babypriya, B.; Renoald, A.J.; Shyamalagowri, M.; Kannan, R. An experimental simulation testing of single-diode PV integrated mppt grid-tied optimized control using grey wolf algorithm. J. Intell. Fuzzy Syst. 2022, 43, 5877–5896. [Google Scholar] [CrossRef]
- Zao, T.; Jia, L.; Pingliang, Z. A multi-timescale operation model for hybrid energy storage system in electricity markets. Int. J. Electr. Power Energy Syst. 2022, 138, 107907. [Google Scholar] [CrossRef]
- Ni, Y.; Chen, S.; Zhang, B. Theory and Analysis of Dynamic Power System; Tsinghua University Press: Beijing, China, 2022. [Google Scholar]
- Shi, H.B.; Chen, G.; Ding, L.J.; Han, X.; Zhang, Y.; Chen, Z. PID parameter optimization of hydro turbine governor considering the primary frequency regulation per-formance and ultra-low frequency oscillation suppression. Power Syst. Technol. 2019, 43, 221–226. [Google Scholar]
- IEEE Std 421.5-2016; IEEE Recommended Practice for Excitation System Models for Power System Stability Studies. IEEE: Piscataway, NJ, USA, 2016; pp. 1–207, Revision of IEEE Std 421.5-2005.
- Parida, A.; Paul, M. A Novel Modeling of DFIG Appropriate for Wind-Energy Generation Systems Analysis. In Proceedings of the 2022 IEEE 10th Power India International Conference (PIICON), New Delhi, India, 25–27 November 2022; pp. 1–6. [Google Scholar]
- Li, W.; Yao, X.; Zhang, T.; Wang, R.; Wang, L. Hierarchy Ranking Method for Multimodal Multiobjective Optimization with Local Pareto Fronts. IEEE Trans. Evol. Comput. 2022, 27, 98–110. [Google Scholar] [CrossRef]
- Parvin, J.R.; Vasanthanayaki, C. Particle swarm optimization-based energy efficient target tracking in wireless sensor network. Measurement 2019, 147, 106882. [Google Scholar] [CrossRef]
- Campos, M.; Krohling, R.A. Entropy-based bare bones particle swarm for dynamic constrained optimization. Knowledge-Based Syst. 2016, 97, 203–223. [Google Scholar] [CrossRef]
- Shahidehpour, M.; Yamin, H.; Li, Z. Market Operations in Electric Power Systems: Forecasting, Scheduling, and Risk Management; Wiley: New York, NY, USA, 2002. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type | Three-Phase | Two-Phase | Single-Phase | Phase-to-Phase | Total |
|---|---|---|---|---|---|
| Statistical results % | 1 | 2 | 93 | 4 | 100 |
| Cases | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| Costs (USD/h) | 95,634 | 98,985 | 104,182 |
| Cases | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| Costs ($/h) | 98,421 | 92,112 | 90,101 |
| Algorithm | Costs ($) | Iterations | Average Calculation Time for Each Iteration |
|---|---|---|---|
| MOPSO | 98,613 | 183 | 4.52 s |
| IMOPSO | 90,101 | 145 | 4.43 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, Q.; Sun, J.; Zha, X.; Zhou, T.; Sun, Z.; Zhao, M. A Two-Stage Optimal Preventive Control Model Incorporating Transient Stability Constraints in the Presence of Multi-Resource Uncertainties. Processes 2023, 11, 2258. https://doi.org/10.3390/pr11082258
Ni Q, Sun J, Zha X, Zhou T, Sun Z, Zhao M. A Two-Stage Optimal Preventive Control Model Incorporating Transient Stability Constraints in the Presence of Multi-Resource Uncertainties. Processes. 2023; 11(8):2258. https://doi.org/10.3390/pr11082258
Chicago/Turabian StyleNi, Qiulong, Jingliao Sun, Xianyu Zha, Taibin Zhou, Zelun Sun, and Ming Zhao. 2023. "A Two-Stage Optimal Preventive Control Model Incorporating Transient Stability Constraints in the Presence of Multi-Resource Uncertainties" Processes 11, no. 8: 2258. https://doi.org/10.3390/pr11082258