
Asymptotic Phase and Amplitude for Classical and Semiclassical Stochastic Oscillators via Koopman Operator Theory


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Phase and Amplitude for Deterministic Limit-Cycle Oscillators
2.1. Classical Definition of the Asymptotic Phase and Amplitude
2.2. Koopman Operator Viewpoint
3. Fokker–Planck Equation and Stochastic Koopman Operator
3.1. Forward and Backward Fokker–Planck Equations
3.2. Eigensystem of the Fokker–Planck Operators
3.3. Stochastic Koopman Operator
4. Phase and Amplitude for Stochastic Oscillatory Systems
4.1. Stochastic Oscillatory Systems
4.2. Assumptions on the Eigenvalues
4.3. Definition of the Asymptotic Phase Function
4.4. Definition of the Amplitude Function
4.5. Limit of Vanishing Noise Intensity
5. Examples
5.1. Numerical Methods
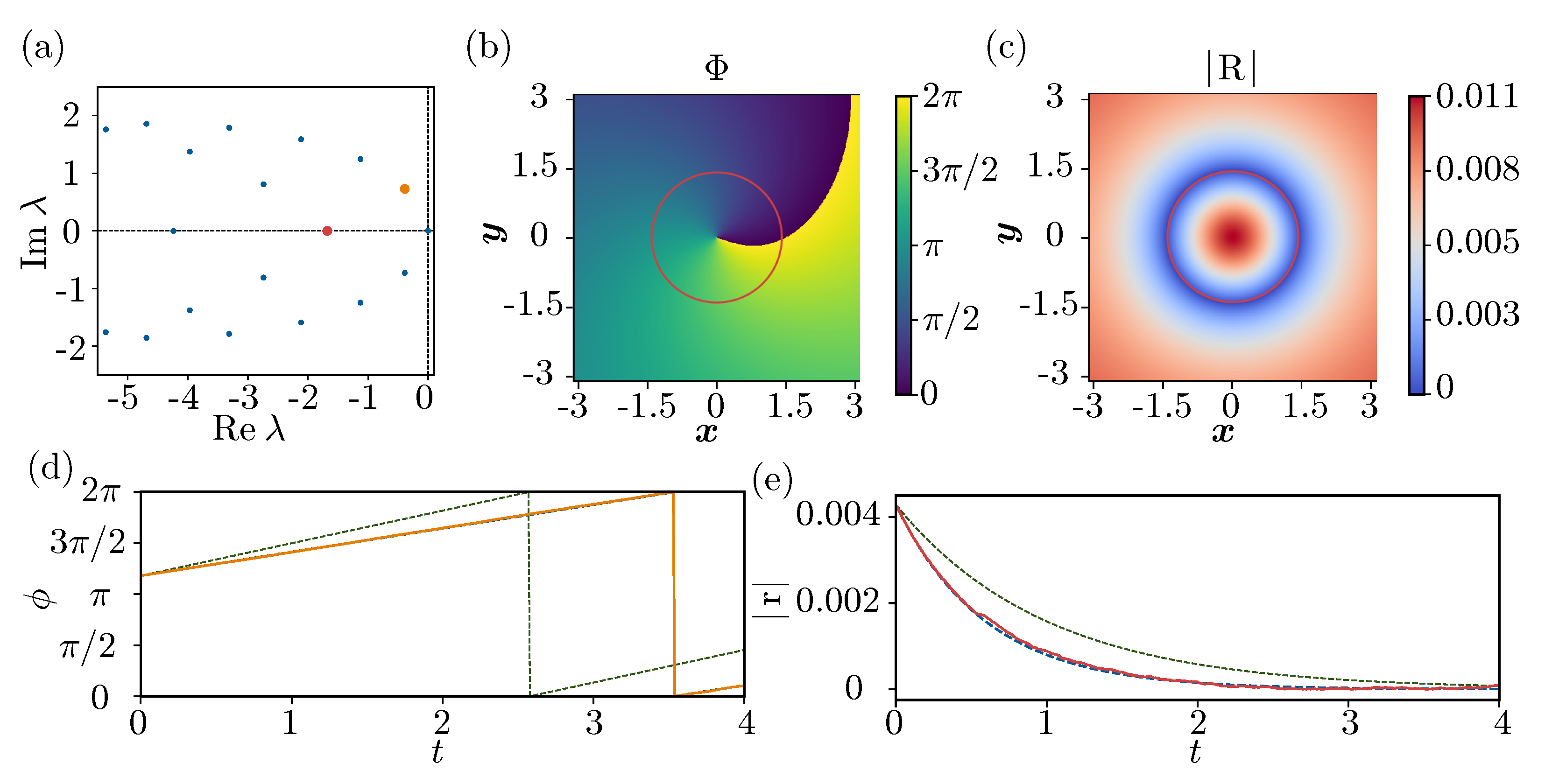
5.2. Example 1: Noisy Stuart–Landau Model
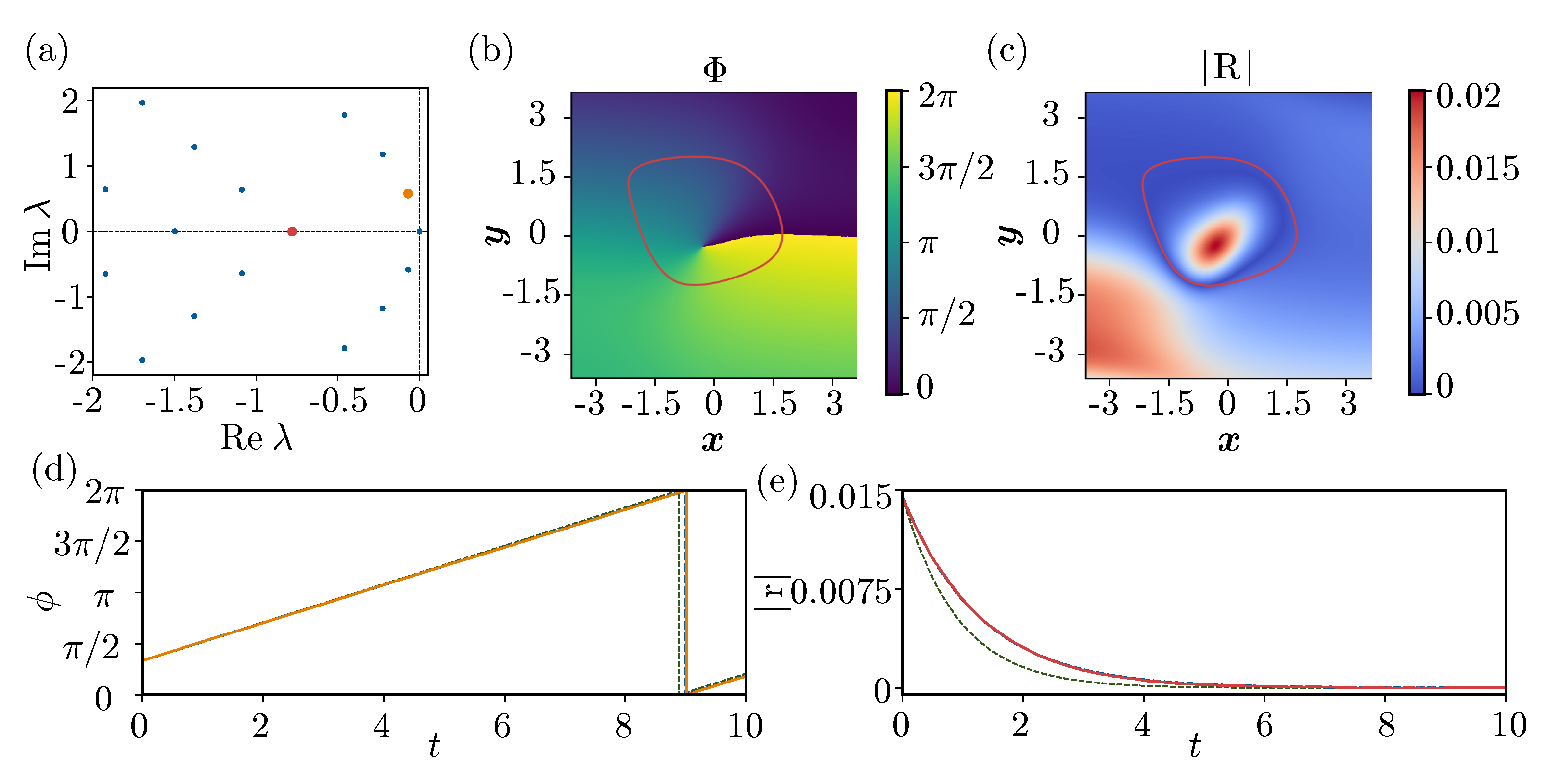
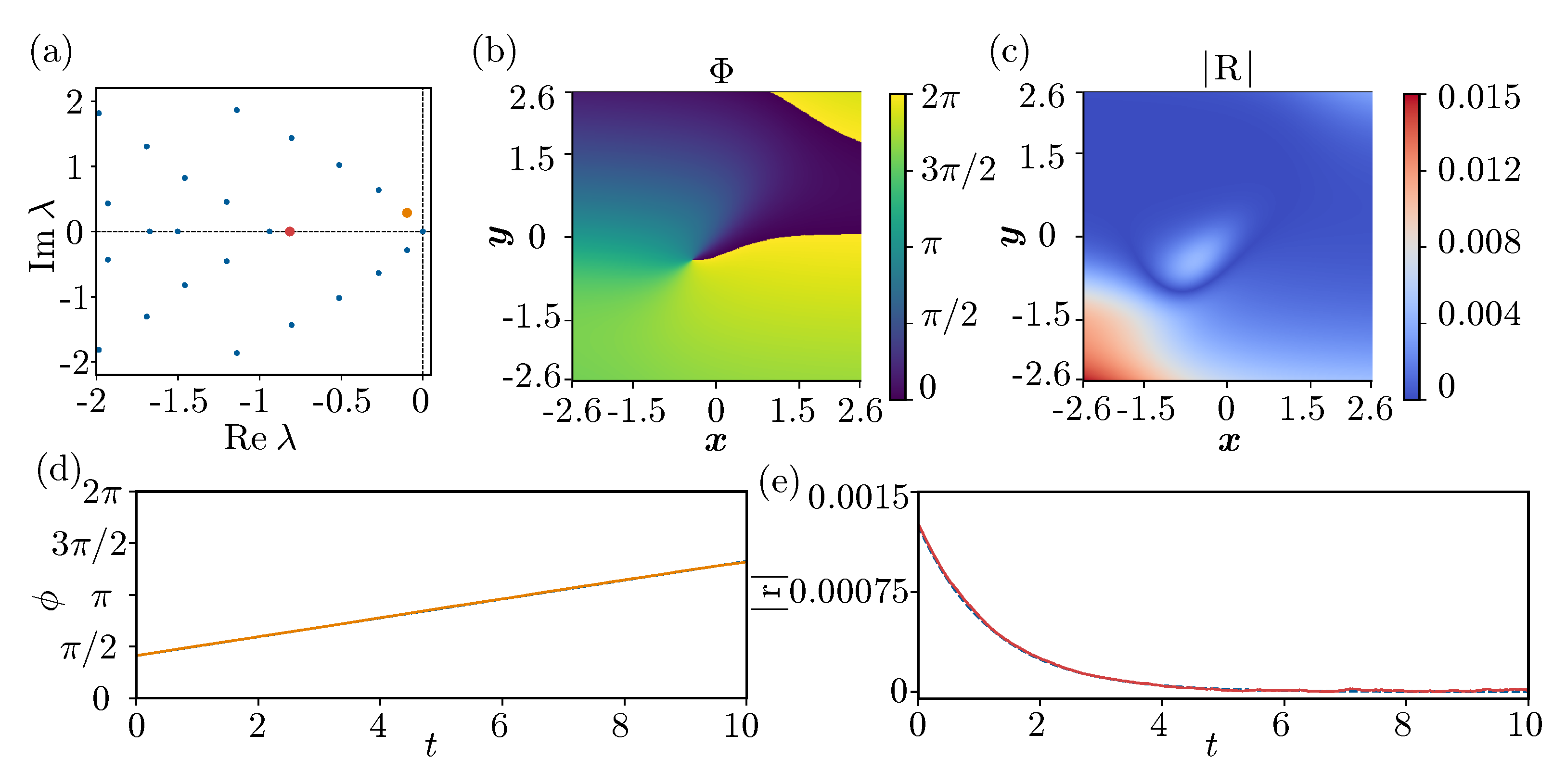
5.3. Example 2: Noisy FitzHugh–Nagumo Model
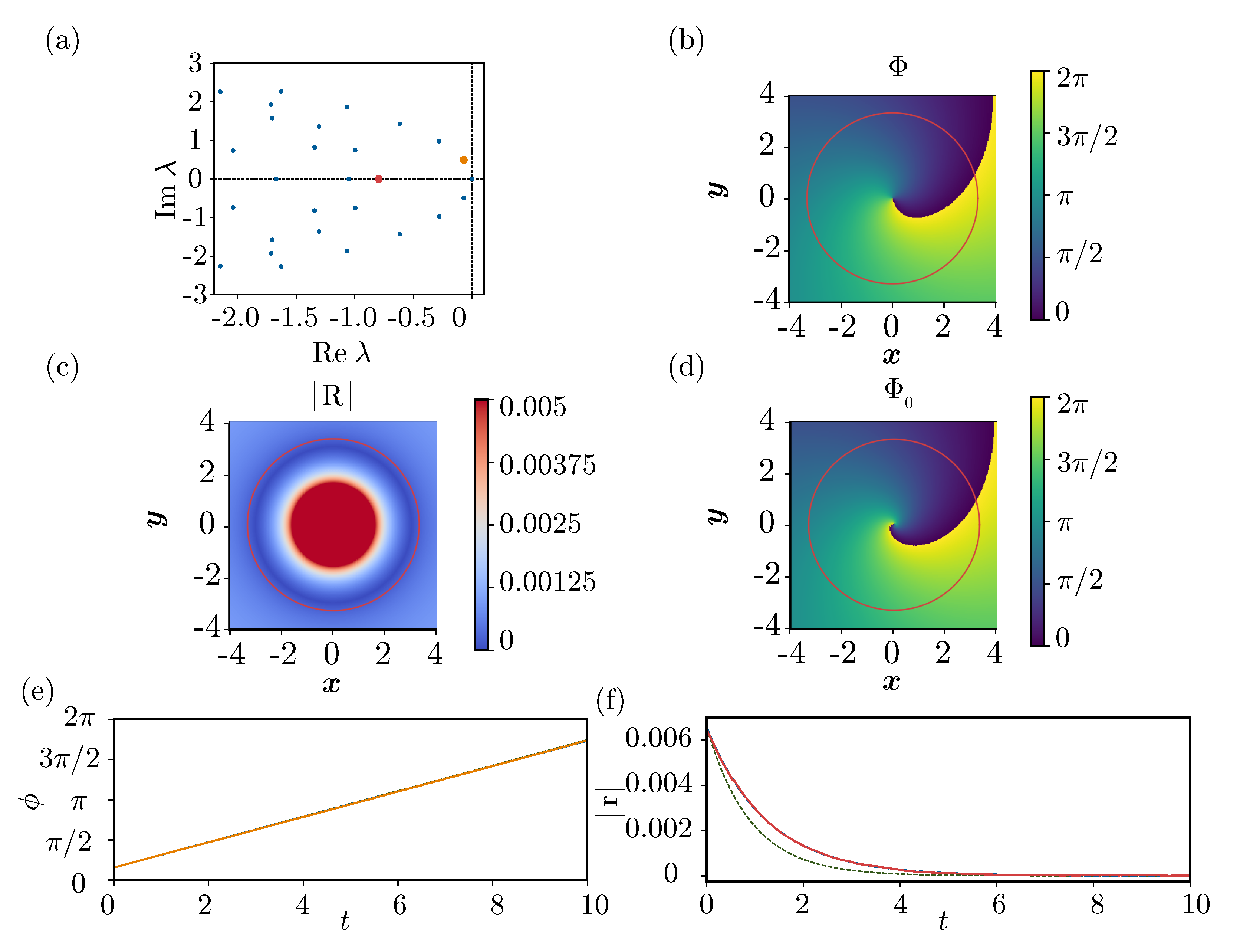
5.4. Example 3: Semiclassical Stuart–Landau Model
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Winfree, A.T. The Geometry of Biological Time; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Kuramoto, Y. Chemical Oscillations, Waves, and Turbulence; Springer: Berlin/Heidelberg, Germany, 1984. [Google Scholar]
- Pikovsky, A.; Rosenblum, M.; Kurths, J. Synchronization: A Universal Concept in Nonlinear Sciences; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Nakao, H. Phase reduction approach to synchronisation of nonlinear oscillators. Contemp. Phys. 2016, 57, 188–214. [Google Scholar] [CrossRef] [Green Version]
- Ermentrout, G.B.; Terman, D.H. Mathematical Foundations of Neuroscience; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Strogatz, S. Nonlinear Dynamics and Chaos; Westview Press: Boulder, CO, USA, 1994. [Google Scholar]
- Hoppensteadt, F.C.; Izhikevich, E.M. Weakly Connected Neural Networks; Springer: Berlin/Heidelberg, Germany, 1997; Volume 126. [Google Scholar]
- Winfree, A.T. Biological rhythms and the behavior of populations of coupled oscillators. J. Theor. Biol. 1967, 16, 15–42. [Google Scholar] [CrossRef]
- Guckenheimer, J. Isochrons and phaseless sets. J. Math. Biol. 1975, 1, 259–273. [Google Scholar] [CrossRef] [PubMed]
- Mauroy, A.; Mezić, I.; Moehlis, J. Isostables, isochrons, and Koopman spectrum for the action–angle representation of stable fixed point dynamics. Phys. D Nonlinear Phenom. 2013, 261, 19–30. [Google Scholar] [CrossRef] [Green Version]
- Mauroy, A.; Susuki, Y.; Mezić, I. Introduction to the Koopman operator in systems and control theory. In The Koopman Operator in Systems and Control; Springer: Berlin/Heidelberg, Germany, 2020; pp. 3–33. [Google Scholar]
- Shirasaka, S.; Kurebayashi, W.; Nakao, H. Phase-amplitude reduction of transient dynamics far from attractors for limit-cycling systems. Chaos 2017, 27, 023119. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kuramoto, Y.; Nakao, H. On the concept of dynamical reduction: The case of coupled oscillators. Philos. Trans. R. Soc. A 2019, 377, 20190041. [Google Scholar] [CrossRef] [Green Version]
- Shirasaka, S.; Kurebayashi, W.; Nakao, H. Phase-Amplitude Reduction of Limit Cycling Systems. In The Koopman Operator in Systems and Control; Springer: Berlin/Heidelberg, Germany, 2020; pp. 383–417. [Google Scholar]
- Hale, J. Ordinary Differential Equations; Dover Publications: Mineola, NY, USA, 2009. [Google Scholar]
- Revzen, S.; Guckenheimer, J.M. Finding the dimension of slow dynamics in a rhythmic system. J. R. Soc. Interface 2012, 9, 957–971. [Google Scholar] [CrossRef] [Green Version]
- Kvalheim, M.D.; Revzen, S. Existence and uniqueness of global Koopman eigenfunctions for stable fixed points and periodic orbits. Phys. Nonlinear Phenom. 2021, 425, 132959. [Google Scholar] [CrossRef]
- Mauroy, A.; Mezić, I. Global computation of phase-amplitude reduction for limit-cycle dynamics. Chaos Interdiscip. J. Nonlinear Sci. 2018, 28, 073108. [Google Scholar] [CrossRef] [Green Version]
- Wilson, D.; Moehlis, J. Isostable reduction of periodic orbits. Phys. Rev. E 2016, 94, 052213. [Google Scholar] [CrossRef] [Green Version]
- Monga, B.; Wilson, D.; Matchen, T.; Moehlis, J. Phase reduction and phase-based optimal control for biological systems: A tutorial. Biol. Cybern. 2019, 113, 11–46. [Google Scholar] [CrossRef]
- Monga, B.; Moehlis, J. Optimal phase control of biological oscillators using augmented phase reduction. Biol. Cybern. 2019, 113, 161–178. [Google Scholar] [CrossRef]
- Zlotnik, A.; Chen, Y.; Kiss, I.Z.; Tanaka, H.A.; Li, J.S. Optimal waveform for fast entrainment of weakly forced nonlinear oscillators. Phys. Rev. Lett. 2013, 111, 024102. [Google Scholar] [CrossRef] [PubMed]
- Kato, Y.; Zlotnik, A.; Li, J.S.; Nakao, H. Optimization of periodic input waveforms for global entrainment of weakly forced limit-cycle oscillators. arXiv 2021, arXiv:2103.02880. [Google Scholar]
- Takata, S.; Kato, Y.; Nakao, H. Fast optimal entrainment of limit-cycle oscillators by strong periodic inputs via phase-amplitude reduction and Floquet theory. arXiv 2021, arXiv:2104.09944. [Google Scholar]
- Kotani, K.; Ogawa, Y.; Shirasaka, S.; Akao, A.; Jimbo, Y.; Nakao, H. Nonlinear phase-amplitude reduction of delay-induced oscillations. Phys. Rev. Res. 2020, 2, 033106. [Google Scholar] [CrossRef]
- Nakao, H. Phase and amplitude description of complex oscillatory patterns in reaction-diffusion systems. In Physics of Biological Oscillators; Springer: Berlin/Heidelberg, Germany, 2021; pp. 11–27. [Google Scholar]
- Teramae, J.; Nakao, H.; Ermentrout, G.B. Stochastic phase reduction for a general class of noisy limit cycle oscillators. Phys. Rev. Lett. 2009, 102, 194102. [Google Scholar] [CrossRef] [Green Version]
- Goldobin, D.S.; Teramae, J.n.; Nakao, H.; Ermentrout, G.B. Dynamics of limit-cycle oscillators subject to general noise. Phys. Rev. Lett. 2010, 105, 154101. [Google Scholar] [CrossRef] [Green Version]
- Nakao, H.; Teramae, J.N.; Goldobin, D.S.; Kuramoto, Y. Effective long-time phase dynamics of limit-cycle oscillators driven by weak colored noise. Chaos Interdiscip. J. Nonlinear Sci. 2010, 20, 033126. [Google Scholar] [CrossRef] [Green Version]
- Bonnin, M. Phase oscillator model for noisy oscillators. Eur. Phys. J. Spec. Top. 2017, 226, 3227–3237. [Google Scholar] [CrossRef]
- Bonnin, M. Amplitude and phase dynamics of noisy oscillators. Int. J. Circuit Theory Appl. 2017, 45, 636–659. [Google Scholar] [CrossRef] [Green Version]
- Aminzare, Z.; Holmes, P.; Srivastava, V. On Phase Reduction and Time Period of Noisy Oscillators. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019; pp. 4717–4722. [Google Scholar]
- Kato, Y.; Yamamoto, N.; Nakao, H. Semiclassical phase reduction theory for quantum synchronization. Phys. Rev. Res. 2019, 1, 033012. [Google Scholar] [CrossRef] [Green Version]
- Schwabedal, J.T.; Pikovsky, A. Phase description of stochastic oscillations. Phys. Rev. Lett. 2013, 110, 204102. [Google Scholar] [CrossRef] [Green Version]
- Thomas, P.J.; Lindner, B. Asymptotic phase for stochastic oscillators. Phys. Rev. Lett. 2014, 113, 254101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, A.; Lindner, B.; Thomas, P.J. A Partial Differential Equation for the Mean–Return-Time Phase of Planar Stochastic Oscillators. SIAM J. Appl. Math. 2020, 80, 422–447. [Google Scholar] [CrossRef] [Green Version]
- Kato, Y.; Nakao, H. Semiclassical optimization of entrainment stability and phase coherence in weakly forced quantum limit-cycle oscillators. Phys. Rev. E 2020, 101, 012210. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kato, Y.; Nakao, H. Quantum asymptotic phase reveals signatures of quantum synchronization. arXiv 2020, arXiv:2006.00760. [Google Scholar]
- Engel, M.; Kuehn, C. A Random Dynamical Systems Perspective on Isochronicity for Stochastic Oscillations. Commun. Math. Phys. 2021, 386, 1–39. [Google Scholar] [CrossRef]
- FitzHugh, R. Impulses and physiological states in theoretical models of nerve membrane. Biophys. J. 1961, 1, 445. [Google Scholar] [CrossRef] [Green Version]
- Nagumo, J.; Arimoto, S.; Yoshizawa, S. An active pulse transmission line simulating nerve axon. Proc. IRE 1962, 50, 2061–2070. [Google Scholar] [CrossRef]
- Guckenheimer, J.; Holmes, P. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields; Springer: Berlin/Heidelberg, Germany, 1982. [Google Scholar]
- Mauroy, A.; Mezić, I. On the use of Fourier averages to compute the global isochrons of (quasi) periodic dynamics. Chaos Interdiscip. J. Nonlinear Sci. 2012, 22, 033112. [Google Scholar] [CrossRef] [Green Version]
- Arnold, L. Stochastic Differential Equations; John Wiley & Sons: Hoboken, NJ, USA, 1974. [Google Scholar]
- Gardiner, C. Stochastic Methods; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Pavliotis, G.A. Stochastic Processes and Applications: Diffusion Processes, the Fokker-Planck and Langevin Equations; Springer: Berlin/Heidelberg, Germany, 2014; Volume 60. [Google Scholar]
- Lasota, A.; Mackey, M.C. Probabilistic Properties of Deterministic Systems; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Lasota, A.; Mackey, M.C. Chaos, Fractals, and Noise: Stochastic Aspects of Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Risken, H. Fokker-planck equation. In The Fokker-Planck Equation; Springer: Berlin/Heidelberg, Germany, 1996; pp. 63–95. [Google Scholar]
- Mezić, I. Spectral properties of dynamical systems, model reduction and decompositions. Nonlinear Dyn. 2005, 41, 309–325. [Google Scholar] [CrossRef]
- Øksendal, B. Stochastic Differential Equations: An Introduction with Applications; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Fisher, N.I. Statistical Analysis of Circular Data; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Gaspard, P. Chaos, Scattering and Statistical Mechanics; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Gang, H.; Ditzinger, T.; Ning, C.Z.; Haken, H. Stochastic resonance without external periodic force. Phys. Rev. Lett. 1993, 71, 807. [Google Scholar] [CrossRef]
- Pikovsky, A.S.; Kurths, J. Coherence resonance in a noise-driven excitable system. Phys. Rev. Lett. 1997, 78, 775. [Google Scholar] [CrossRef] [Green Version]
- Lindner, B.; Schimansky-Geier, L. Coherence and stochastic resonance in a two-state system. Phys. Rev. E 2000, 61, 6103. [Google Scholar] [CrossRef] [Green Version]
- Chia, A.; Kwek, L.; Noh, C. Relaxation oscillations and frequency entrainment in quantum mechanics. Phys. Rev. E 2020, 102, 042213. [Google Scholar] [CrossRef] [PubMed]
- Arosh, L.B.; Cross, M.; Lifshitz, R. Quantum limit cycles and the Rayleigh and van der Pol oscillators. Phys. Rev. Res. 2021, 3, 013130. [Google Scholar] [CrossRef]
- Lee, T.E.; Sadeghpour, H. Quantum synchronization of quantum van der Pol oscillators with trapped ions. Phys. Rev. Lett. 2013, 111, 234101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lörch, N.; Amitai, E.; Nunnenkamp, A.; Bruder, C. Genuine quantum signatures in synchronization of anharmonic self-oscillators. Phys. Rev. Lett. 2016, 117, 073601. [Google Scholar] [CrossRef] [Green Version]
- Gardiner, C.W. Quantum Noise; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Carmichael, H.J. Statistical Methods in Quantum Optics 1, 2; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Zhu, J. Phase sensitivity for coherence resonance oscillators. Nonlinear Dyn. 2020, 102, 2281–2293. [Google Scholar] [CrossRef]
- Zhu, J.; Nakao, H. Stochastic periodic orbits in fast-slow systems with self-induced stochastic resonance. Phys. Rev. Res. 2021, 3, 033070. [Google Scholar] [CrossRef]
- Pérez-Cervera, A.; Lindner, B.; Thomas, P.J. Isostables for stochastic oscillators. arXiv 2021, arXiv:2105.11048. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kato, Y.; Zhu, J.; Kurebayashi, W.; Nakao, H. Asymptotic Phase and Amplitude for Classical and Semiclassical Stochastic Oscillators via Koopman Operator Theory. Mathematics 2021, 9, 2188. https://doi.org/10.3390/math9182188
Kato Y, Zhu J, Kurebayashi W, Nakao H. Asymptotic Phase and Amplitude for Classical and Semiclassical Stochastic Oscillators via Koopman Operator Theory. Mathematics. 2021; 9(18):2188. https://doi.org/10.3390/math9182188
Chicago/Turabian StyleKato, Yuzuru, Jinjie Zhu, Wataru Kurebayashi, and Hiroya Nakao. 2021. "Asymptotic Phase and Amplitude for Classical and Semiclassical Stochastic Oscillators via Koopman Operator Theory" Mathematics 9, no. 18: 2188. https://doi.org/10.3390/math9182188