
A Convex Data-Driven Approach for Nonlinear Control Synthesis


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background
2.1. Density Function Approach for Control Synthesis
2.2. Sum of Squares
2.3. Linear Koopman and Perron–Frobenius Operators
3. Stabilization with Stronger Notion of Stability
4. Data-Driven Numerical Algorithm for Control Synthesis
4.1. Density Function Approach Reformulation
4.2. Data-Driven Approximation of Linear Operators
4.3. Convex Control Synthesis: Combining SOS with Koopman
5. Numerical Case Studies
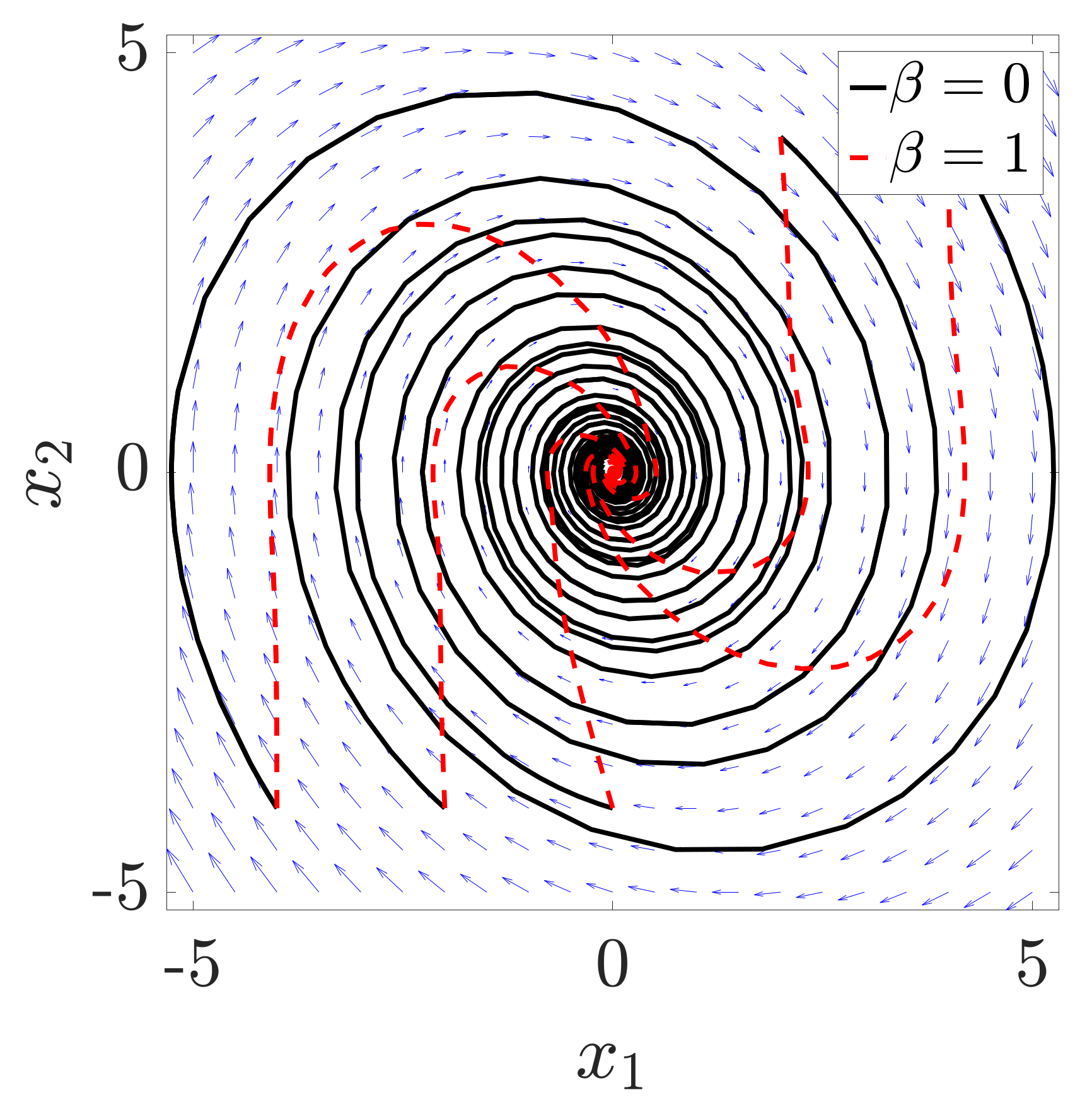
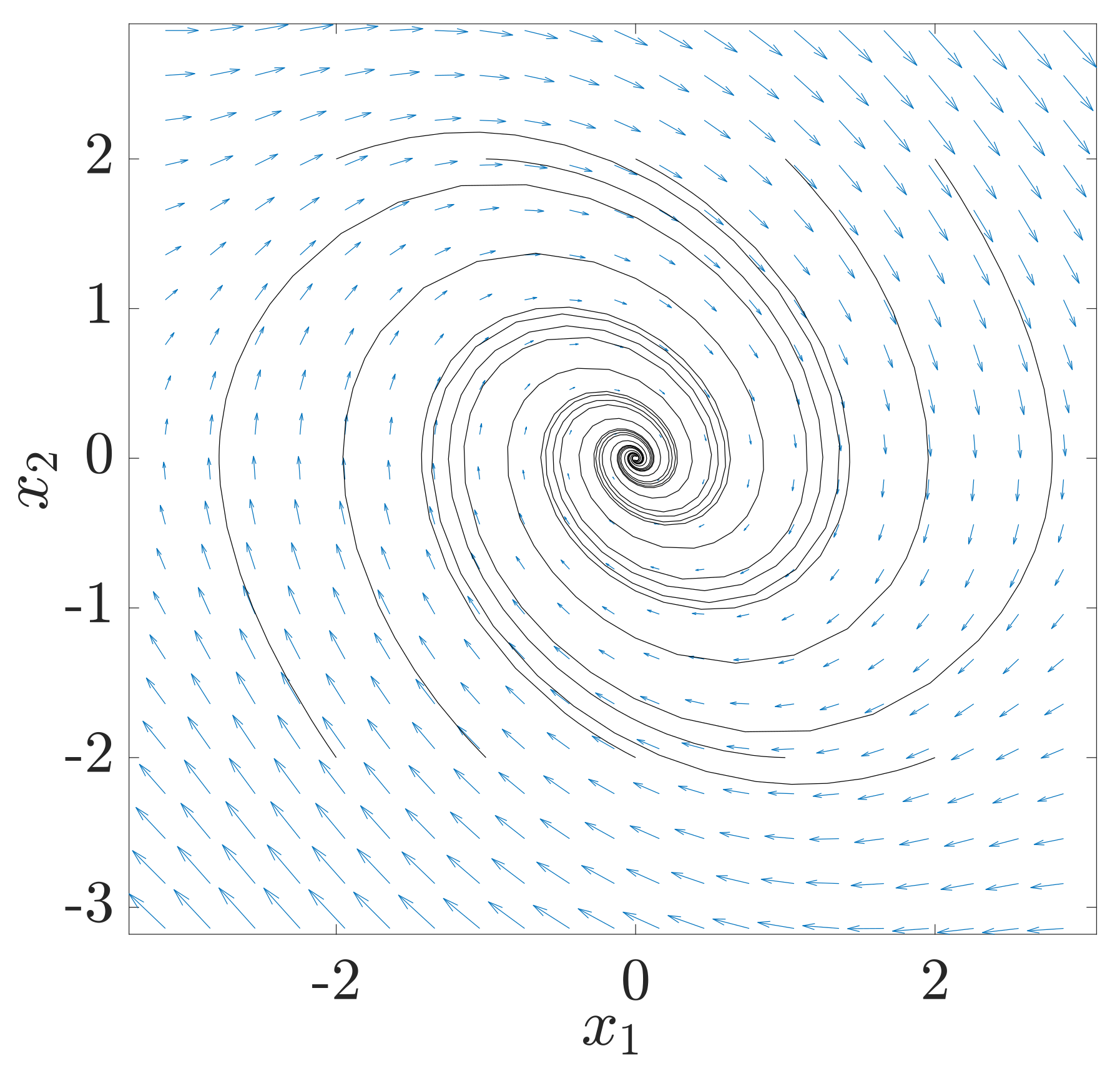
5.1. Van der Pol Oscillator
5.2. Non-Polynomial System Example: Inverted Pendulum
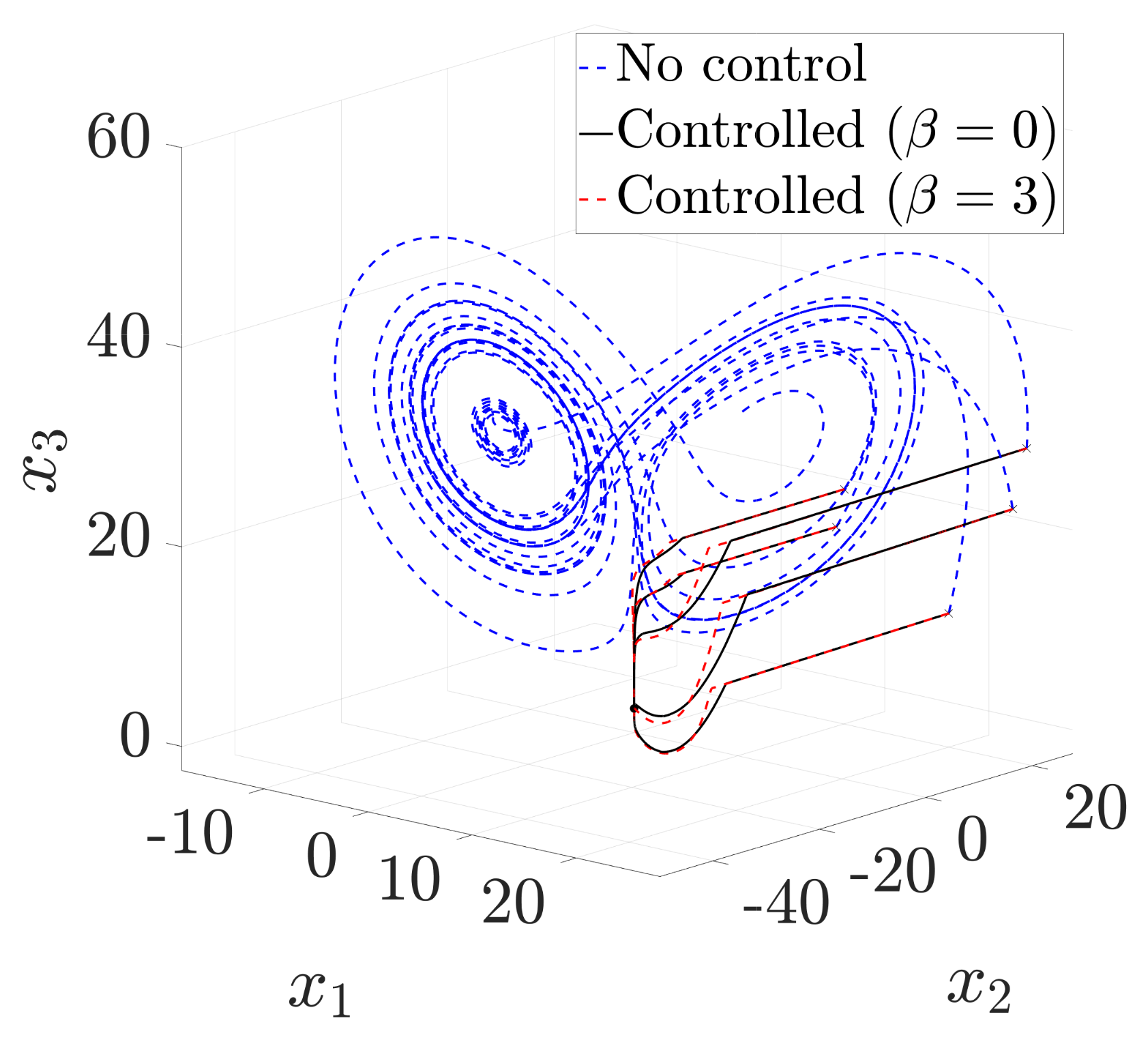
5.3. Lorenz System Dynamics
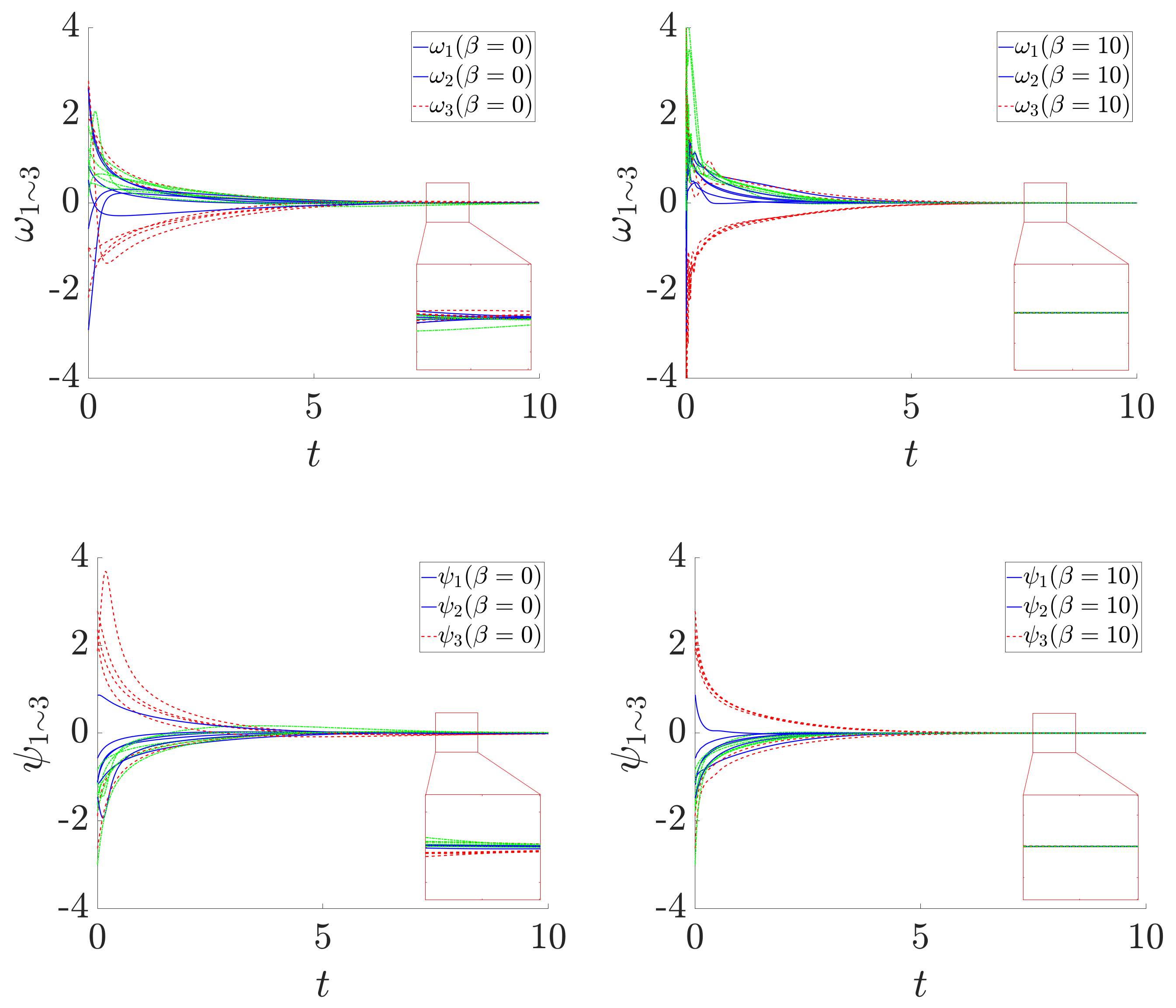
5.4. Rigid Body Control
6. Concluding Remark
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Rantzer, A. A dual to Lyapunov’s stability theorem. Syst. Control Lett. 2001, 42, 161–168. [Google Scholar] [CrossRef]
- Vaidya, U.; Mehta, P.G. Lyapunov measure for almost everywhere stability. IEEE Trans. Autom. Control 2008, 53, 307–323. [Google Scholar] [CrossRef]
- Rajaram, R.; Vaidya, U.; Fardad, M.; Ganapathysubramanian, B. Stability in the almost everywhere sense: A linear transfer operator approach. J. Math. Anal. Appl. 2010, 368, 144–156. [Google Scholar] [CrossRef] [Green Version]
- Das, A.K.; Huang, B.; Vaidya, U. Data-Driven Optimal Control Using Transfer Operators. In Proceedings of the IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; pp. 3223–3228. [Google Scholar]
- Raghunathan, A.; Vaidya, U. Optimal stabilization using Lyapunov measures. IEEE Trans. Autom. Control 2013, 59, 1316–1321. [Google Scholar] [CrossRef] [Green Version]
- Williams, M.O.; Kevrekidis, I.G.; Rowley, C.W. A Data-Driven Approximation of the Koopman Operator: Extending Dynamic Mode Decomposition. J. Nonlinear Sci. 2015, 25, 1307–1346. [Google Scholar] [CrossRef] [Green Version]
- Mezić, I. Analysis of Fluid Flows via Spectral Properties of the Koopman Operator. Annu. Rev. Fluid Mech. 2013, 45, 357–378. [Google Scholar] [CrossRef] [Green Version]
- Susuki, Y.; Mezic, I.; Raak, F.; Hikihara, T. Applied Koopman operator theory for power systems technology. Nonlinear Theory Its Appl. IEICE 2016, 7, 430–459. [Google Scholar] [CrossRef] [Green Version]
- Sharma, P.; Huang, B.; Ajjarapu, V.; Vaidya, U. Data-driven Identification and Prediction of Power System Dynamics Using Linear Operators. In Proceedings of the 2019 IEEE Power Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Mauroy, A.; Mezić, I. Global stability analysis using the eigenfunctions of the Koopman operator. IEEE Trans. Autom. Control 2016, 61, 3356–3369. [Google Scholar] [CrossRef] [Green Version]
- Korda, M.; Mezić, I. Linear predictors for nonlinear dynamical systems: Koopman operator meets model predictive control. Automatica 2018, 93, 149–160. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Ma, X.; Vaidya, U. Data-driven nonlinear stabilization using koopman operator. In The Koopman Operator in Systems and Control; Springer: Berlin/Heidelberg, Germany, 2020; pp. 313–334. [Google Scholar]
- Kaiser, E.; Kutz, J.N.; Brunton, S.L. Data-driven discovery of Koopman eigenfunctions for control. arXiv 2017, arXiv:1707.01146. [Google Scholar]
- Kaiser, E.; Kutz, J.N.; Brunton, S.L. Data-Driven Approximations of Dynamical Systems Operators for Control; Springer: Heidelberg, Germany, 2020. [Google Scholar]
- Guo, M.; De Persis, C.; Tesi, P. Learning control for polynomial systems using sum of squares relaxations. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, Korea, 14–18 December 2020; pp. 2436–2441. [Google Scholar]
- Dai, T.; Sznaier, M. A semi-algebraic optimization approach to data-driven control of continuous-time nonlinear systems. IEEE Control Syst. Lett. 2020, 5, 487–492. [Google Scholar] [CrossRef]
- Zhao, P.; Mohan, S.; Vasudevan, R. Control synthesis for nonlinear optimal control via convex relaxations. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 2654–2661. [Google Scholar]
- Topcu, U.; Packard, A.; Seiler, P.; Balas, G. Help on SOS [Ask the Experts]. IEEE Control Syst. Mag. 2010, 30, 18–23. [Google Scholar]
- Parrilo, P.A. Semidefinite programming relaxations for semialgebraic problems. Math. Program. 2003, 96, 293–320. [Google Scholar] [CrossRef]
- Parrilo, P.A.; Sturmfels, B. Minimizing Polynomial Functions. Algorithmic Quantit. Real Algeb. Geom. 2003, 60, 83–99. [Google Scholar]
- Parrilo, P.A. Structured Semidefinite Programs and Semialgebraic Geometry Methods in Robustness and Optimization. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2000. [Google Scholar]
- Laurent, M. Sums of Squares, Moment Matrices and Optimization Over Polynomials. In Emerging Applications of Algebraic Geometry; Putinar, M., Sullivant, S., Eds.; Springer: New York, NY, USA, 2009; pp. 157–270. [Google Scholar]
- Papachristodoulou, A.; Anderson, J.; Valmorbida, G.; Prajna, S.; Seiler, P.; Parrilo, P.A. SOSTOOLS: Sum of Squares Optimization Toolbox for MATLAB. arXiv 2013, arXiv:1310.4716. [Google Scholar]
- Seiler, P. SOSOPT: A Toolbox for Polynomial Optimization. arXiv 2013, arXiv:1308.1889. [Google Scholar]
- Prajna, S.; Parrilo, P.A.; Rantzer, A. Nonlinear control synthesis by convex optimization. IEEE Trans. Autom. Control 2004, 49, 310–314. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Ma, X.; Vaidya, U. Feedback Stabilization Using Koopman Operator. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; pp. 6434–6439. [Google Scholar]
- Klus, S.; Nüske, F.; Peitz, S.; Niemann, J.H.; Clementi, C.; Schütte, C. Data-Driven Approximation of the Koopman Generator: Model Reduction, System Identification, and Control. Phys. D Nonlinear Phenom. 2020, 406, 132416. [Google Scholar] [CrossRef] [Green Version]
- Chartrand, R. Numerical Differentiation of Noisy, Nonsmooth Data. ISRN Appl. Math. 2011, 149–165. [Google Scholar] [CrossRef] [Green Version]
- Na, T. Computational Methods in Engineering Boundary Value Problems; Mathematics in Science and Engineering: A Series of Monographs and Textbooks; Academic Press: Cambridge, MA, USA, 1979. [Google Scholar]
- Ma, X.; Huang, B.; Vaidya, U. Optimal Quadratic Regulation of Nonlinear System Using Koopman Operator. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4911–4916. [Google Scholar] [CrossRef]
- Chen, Y.; Vaidya, U. Sample Complexity for Nonlinear Stochastic Dynamics. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 3526–3531. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, H.; Vaidya, U.; Chen, Y. A Convex Data-Driven Approach for Nonlinear Control Synthesis. Mathematics 2021, 9, 2445. https://doi.org/10.3390/math9192445
Choi H, Vaidya U, Chen Y. A Convex Data-Driven Approach for Nonlinear Control Synthesis. Mathematics. 2021; 9(19):2445. https://doi.org/10.3390/math9192445
Chicago/Turabian StyleChoi, Hyungjin, Umesh Vaidya, and Yongxin Chen. 2021. "A Convex Data-Driven Approach for Nonlinear Control Synthesis" Mathematics 9, no. 19: 2445. https://doi.org/10.3390/math9192445