
A New Self-Tuning Deep Neuro-Sliding Mode Control for Multi-Machine Power System Stabilizer


Abstract
:1. Introduction
- Introducing a new delayed deep neural network.
- Designing a sliding mode control system with six adjustable parameters (in previous works, there were usually two or three adjustable parameters).
- The development of the proposed control system for synchronizing a power system.
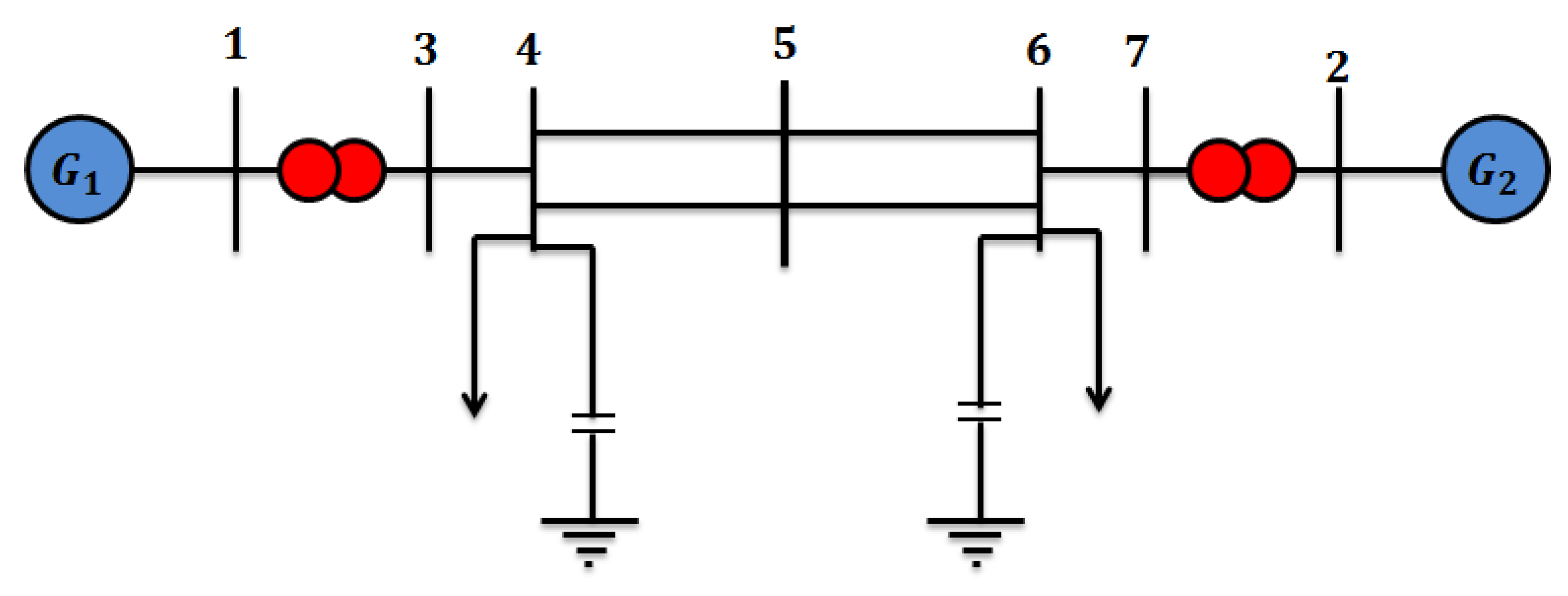
2. Dynamic Model of Synchronous Generator
3. Sliding Mode Control
3.1. Converting the System to Normal Form
3.2. Designing Sliding Surfaces:
3.3. Design of Control Functions
4. Sliding Controller Design
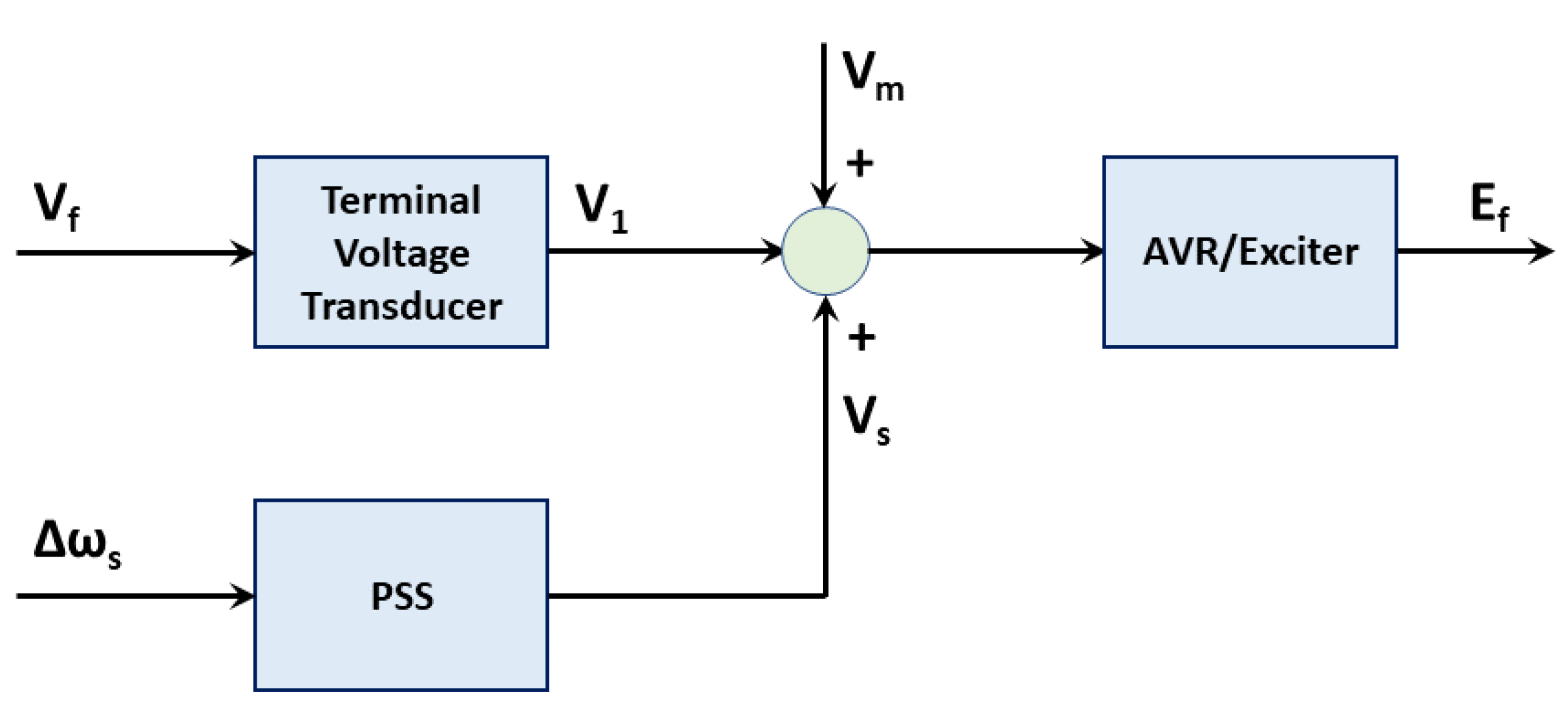
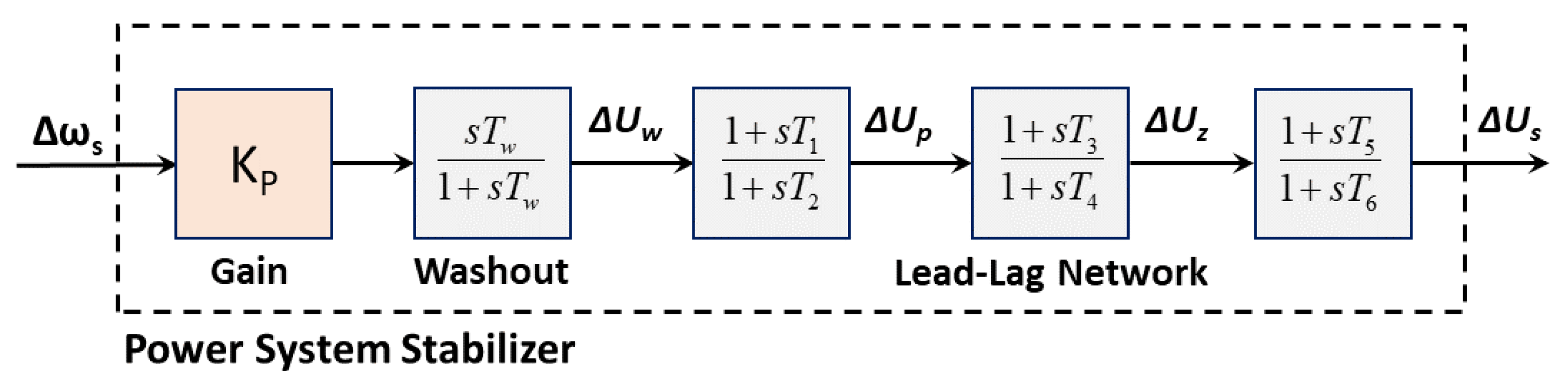
5. Comparison of Proposed and Classical Power System Stabilizer
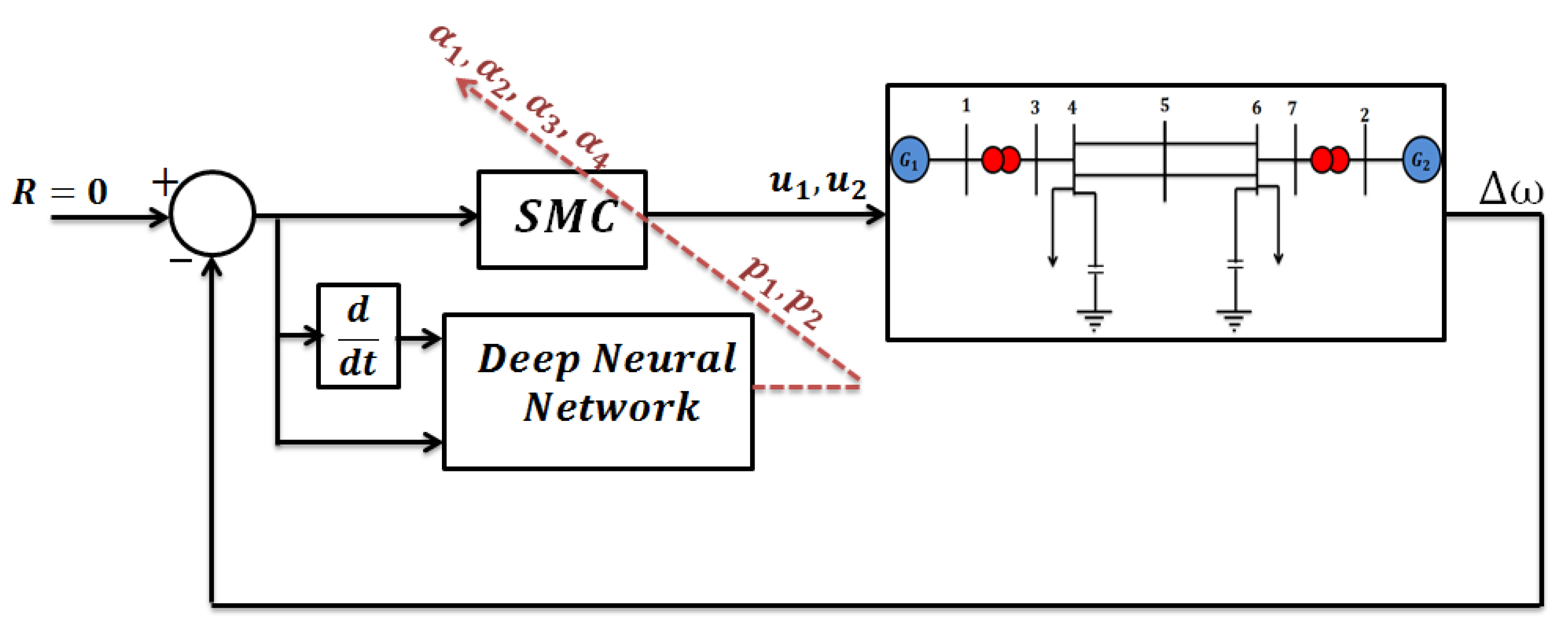
Calculation of SMS Parameters with DNN
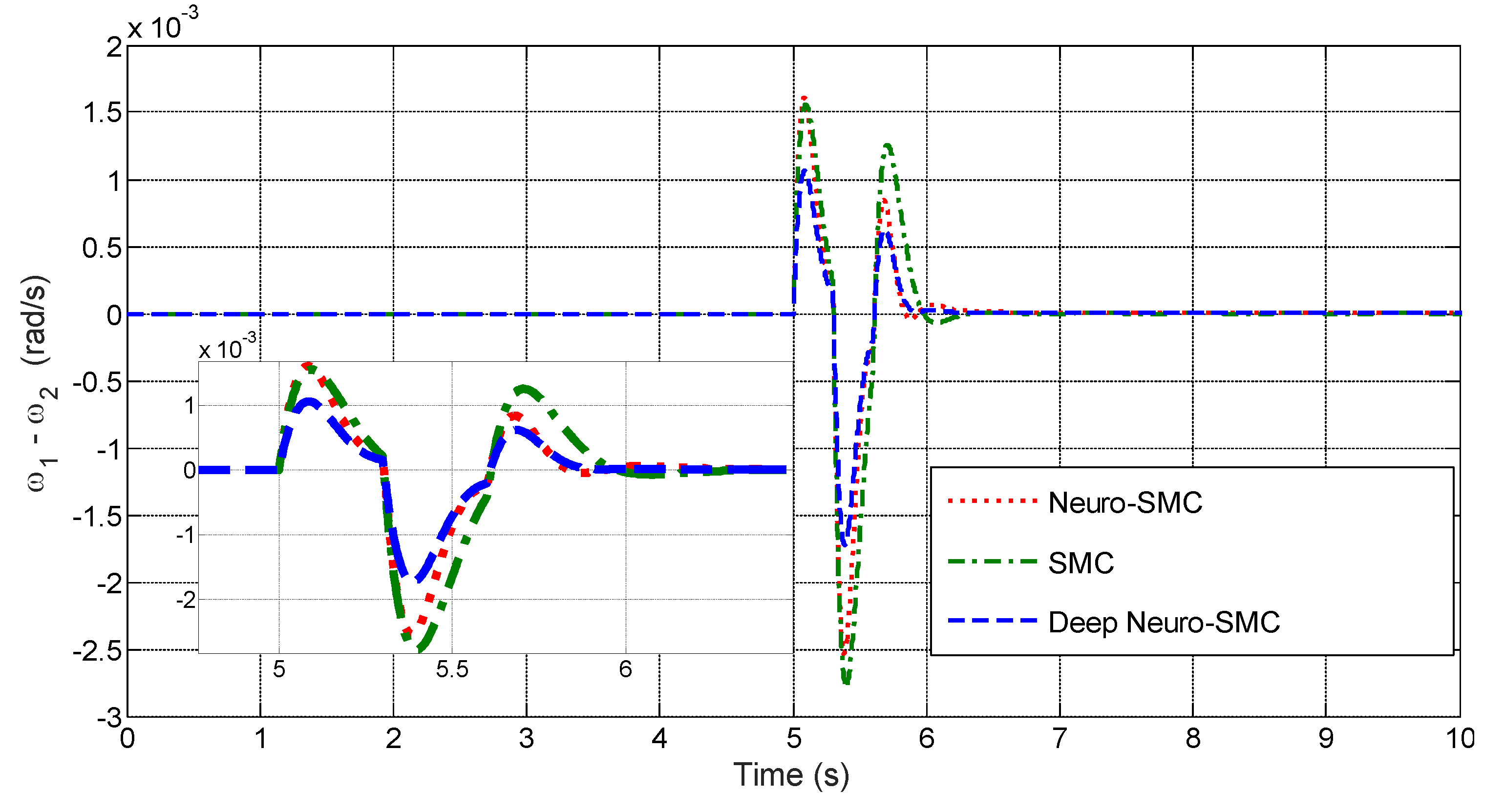
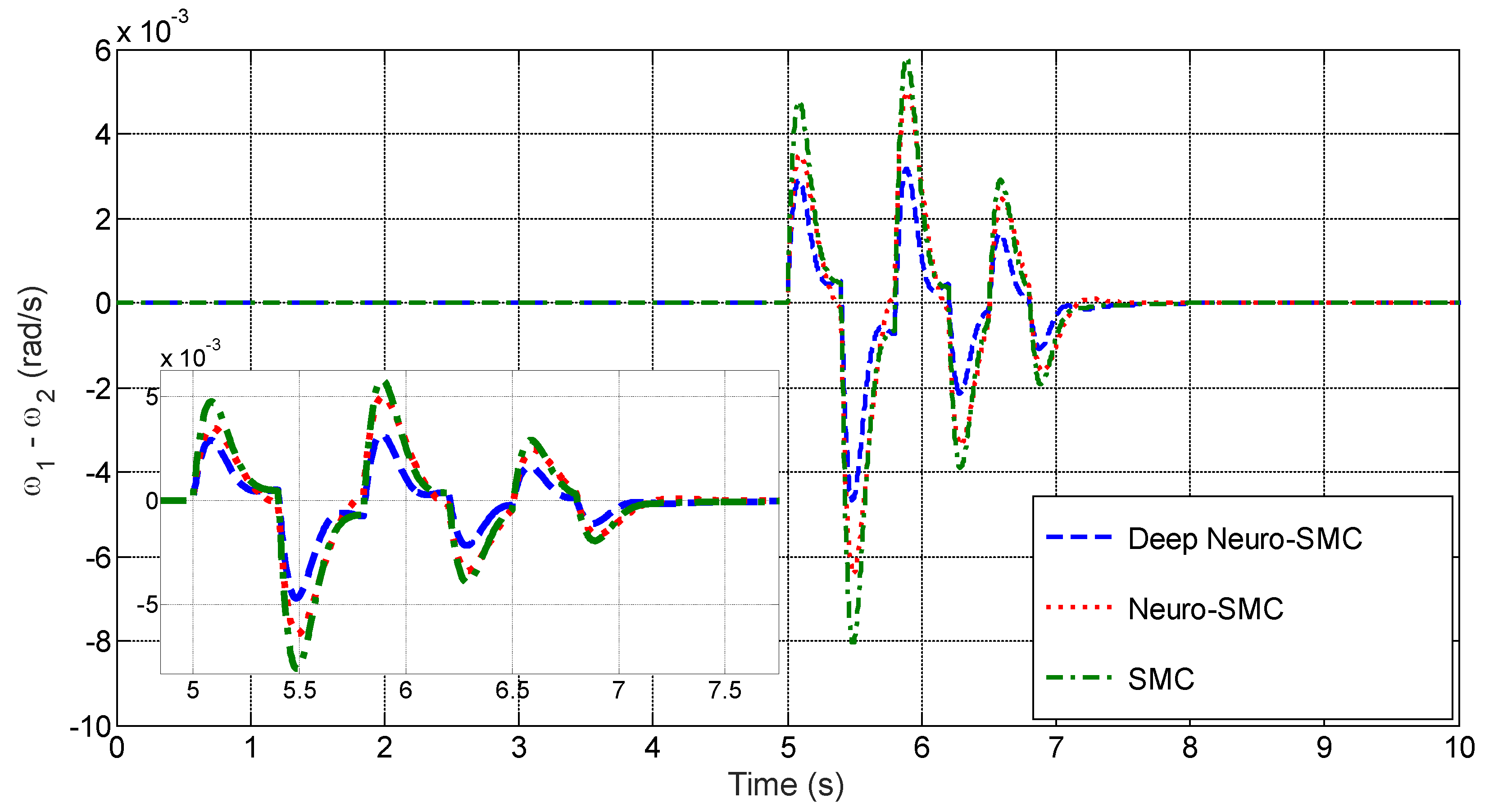
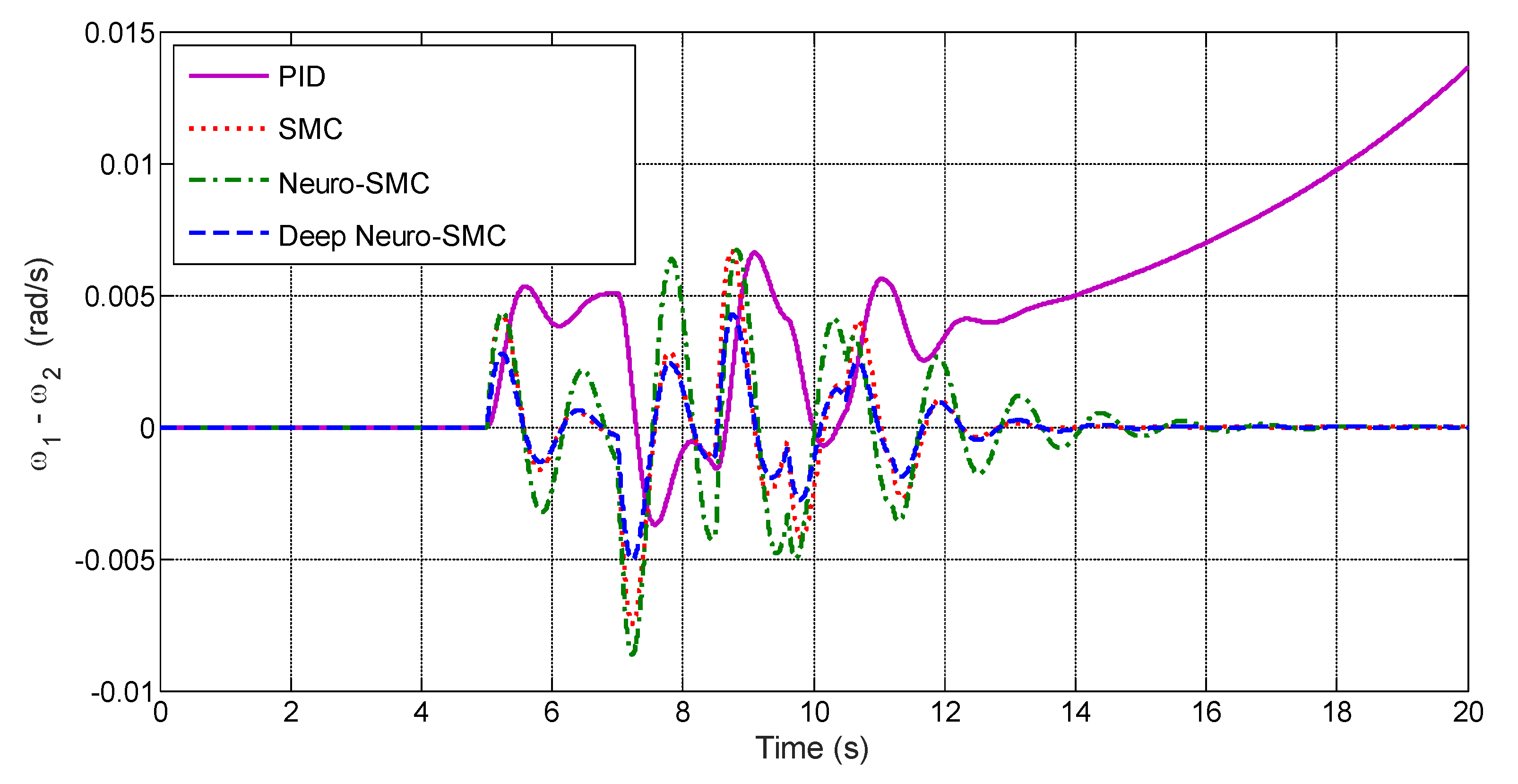
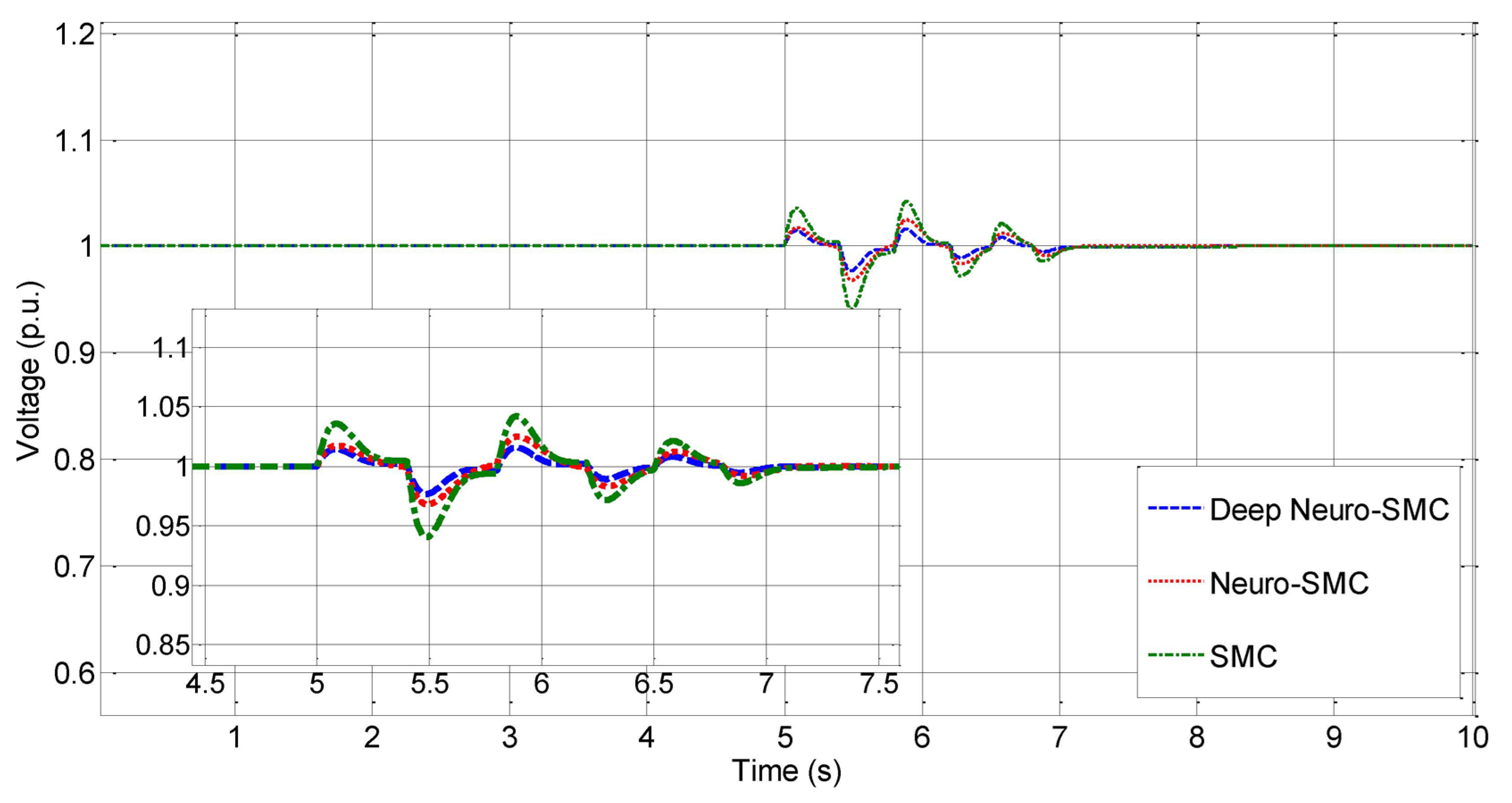
6. Simulation Results
Creating a Symmetric Three-Phase Error
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Symbol | Definition |
|---|---|---|---|
| rotor angle | rotor angular speed | ||
| mechanical power of generator input | generator reactance in d direction | ||
| transient generator reactance in d direction | total generator reactance in d direction | ||
| system with gain | short circuit transient time | ||
| infinite bus voltage | synchronous velocity of the generator | ||
| inertia constant of the generator | damping constant of the generator | ||
| state of neurons | time varying bias | ||
| the controller input of the system | input of the system controller | ||
| combining the data signal | time-delayed feedback signals modulated by the functions | ||
| desired value of state |
| Gen | p.u. | p.u. | p.u. | p.u. | p.u. | p.u. |
|---|---|---|---|---|---|---|
| 1 | 0.0025 | 1.8 | 0.3 | 1.7 | 0.55 | 0.2 |
| 2 | 0.0025 | 1.8 | 0.3 | 1.7 | 0.55 | 0.2 |
| 3 | 0.0025 | 1.8 | 0.3 | 1.7 | 0.55 | 0.2 |
| 4 | 0.0025 | 1.8 | 0.3 | 1.7 | 0.55 | 0.2 |
| Gen | s | s | H s | s | s | s |
|---|---|---|---|---|---|---|
| 1 | 8 | 0.4 | 6.5 | 0 | - | 0.02 |
| 2 | 8 | 0.4 | 6.5 | 0 | 200 | 0.02 |
| 3 | 8 | 0.4 | 6.175 | 0 | 200 | 0.02 |
| 4 | 8 | 0.4 | 6.175 | 0 | 200 | 0.02 |
References
- Senyuk, M.; Safaraliev, M.; Gulakhmadov, A.; Ahyoev, J. Application of the Conditional Optimization Method for the Synthesis of the Law of Emergency Control of a Synchronous Generator Steam Turbine Operating in a Complex-Closed Configuration Power System. Mathematics 2022, 10, 3979. [Google Scholar] [CrossRef]
- Guesmi, T.; Alshammari, B.M.; Welhazi, Y.; Hadj Abdallah, H.; Toumi, A. Robust Fuzzy Control for Uncertain Nonlinear Power Systems. Mathematics 2022, 10, 1463. [Google Scholar] [CrossRef]
- Mohammadi, F.; Mohammadi-Ivatloo, B.; Gharehpetian, G.B.; Ali, M.H.; Wei, W.; Erdinç, O.; Shirkhani, M. Robust Control Strategies for Microgrids: A Review. IEEE Syst. J. 2022, 16, 2401–2412. [Google Scholar] [CrossRef]
- Chitara, D.; Niazi, K.R.; Swarnkar, A.; Gupta, N. Cuckoo Search Optimization Algorithm for Designing of a Multimachine Power System Stabilizer. IEEE Trans. Ind. Appl. 2018, 54, 3056–3065. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Azizi, A.; Din, S.U.; Mohammadzadeh, A.; Mobayen, S. A hybrid approach for fault location in power distributed networks: Impedance-based and machine learning technique. Electr. Power Syst. Res. 2022, 210, 108073. [Google Scholar] [CrossRef]
- Danyali, S.; Aghaei, O.; Shirkhani, M.; Aazami, R.; Tavoosi, J.; Mohammadzadeh, A.; Mosavi, A. A New Model Predictive Control Method for Buck-Boost Inverter-Based Photovoltaic Systems. Sustainability 2022, 14, 11731. [Google Scholar] [CrossRef]
- Hatziargyriou, N.; Milanovic, J.; Rahmann, C.; Ajjarapu, V.; Canizares, C.; Erlich, I.; Hill, D.; Hiskens, I.; Kamwa, I.; Pal, B.; et al. Definition and Classification of Power System Stability—Revisited & Extended. IEEE Trans. Power Syst. 2021, 36, 3271–3281. [Google Scholar] [CrossRef]
- Peng, Q.; Jiang, Q.; Yang, Y.; Liu, T.; Wang, H.; Blaabjerg, F. On the Stability of Power Electronics-Dominated Systems: Challenges and Potential Solutions. IEEE Trans. Ind. Appl. 2019, 55, 7657–7670. [Google Scholar] [CrossRef]
- Aazami, R.; Heydari, O.; Tavoosi, J.; Shirkhani, M.; Mohammadzadeh, A.; Mosavi, A. Optimal Control of an Energy-Storage System in a Microgrid for Reducing Wind-Power Fluctuations. Sustainability 2022, 14, 6183. [Google Scholar] [CrossRef]
- Izci, D. A novel improved atom search optimization algorithm for designing power system stabilizer. Evol. Intell. 2022, 15, 2089–2103. [Google Scholar] [CrossRef]
- Huang, H.; Shirkhani, M.; Tavoosi, J.; Mahmoud, O. A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems. Mathematics 2022, 10, 1406. [Google Scholar] [CrossRef]
- Ray, P.K.; Paital, S.; Mohanty, A.; Eddy, F.S.; Gooi, H.B. A robust power system stabilizer for enhancement of stability in power system using adaptive fuzzy sliding mode control. Appl. Soft Comput. 2018, 73, 471–481. [Google Scholar] [CrossRef]
- Devarapalli, R.; Bhattacharyya, B. A hybrid modified grey wolf optimization-sine cosine algorithm-based power system stabilizer parameter tuning in a multimachine power system. Optim. Control Appl. Methods 2020, 41, 1143–1159. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Abdali, A.; Mohammadzadeh, A.; Nazari, M.; Mobayen, S.; Asad, J.H.; Bartoszewicz, A. A New General Type-2 Fuzzy Predictive Scheme for PID Tuning. Appl. Sci. 2021, 11, 10392. [Google Scholar] [CrossRef]
- Guo, X.; Shirkhani, M.; Ahmed, E.M. Machine-Learning-Based Improved Smith Predictive Control for MIMO Processes. Mathematics 2022, 10, 3696. [Google Scholar] [CrossRef]
- Abd Elazim, S.M.; Ali, E.S. Optimal power system stabilizers design via cuckoo search algorithm. Int. J. Electr. Power Energy Syst. 2016, 75, 99–107. [Google Scholar] [CrossRef]
- Kumar, J.; Kumar, P.P.; Mahesh, A.; Shrivastava, A. Power system stabilizer based on artificial neural network. In Proceedings of the 2011 International Conference on Power and Energy Systems, Chennai, India, 22–24 December 2011. [Google Scholar]
- Zhang, H.; Zhao, X.; Zhang, L.; Niu, B.; Zong, G.; Xu, N. Observer-based adaptive fuzzy hierarchical sliding mode control of uncertain under-actuated switched nonlinear systems with input quantization. Int. J. Robust Nonlinear Control 2022, 32, 8163–8185. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Zhao, X.; Xu, N. Event-triggered adaptive tracking control for uncertain fractional-order nonstrict-feedback nonlinear systems via command filtering. Int. J. Robust Nonlinear Control 2022, 32, 7987–8011. [Google Scholar] [CrossRef]
- Tang, F.; Niu, B.; Zong, G.; Zhao, X.; Xu, N. Periodic event-triggered adaptive tracking control design for nonlinear discrete-time systems via reinforcement learning. Neural Netw. 2022, 154, 43–55. [Google Scholar] [CrossRef]
- Zhang, H.; Zou, Q.; Ju, Y.; Song, C.; Chen, D. Distance-based support vector machine to predict DNA N6-methyladenine modification. Curr. Bioinform. 2022, 17, 473–482. [Google Scholar]
- Bernal, E.; Lagunes, M.L.; Castillo, O.; Soria, J.; Valdez, F. Optimization of type-2 fuzzy logic controller design using the GSO and FA algorithms. Int. J. Fuzzy Syst. 2021, 23, 42–57. [Google Scholar] [CrossRef]
- Wang, M.; Yang, M.; Fang, Z.; Wang, M.; Wu, Q. A Practical Feeder Planning Model for Urban Distribution System. IEEE Trans. Power Syst. 2022, 38, 1297–1308. [Google Scholar] [CrossRef]
- Sharma, S.; Obaid, A.J. Mathematical modelling, analysis and design of fuzzy logic controller for the control of ventilation systems using MATLAB fuzzy logic toolbox. J. Interdiscip. Math. 2020, 23, 843–849. [Google Scholar] [CrossRef]
- Si, Z.; Yang, M.; Yu, Y.; Ding, T. Photovoltaic power forecast based on satellite images considering effects of solar position. Appl. Energy 2021, 302, 117514. [Google Scholar] [CrossRef]
- Sreedivya, K.M.; Jeyanthy, P.A.; Devaraj, D. Improved design of interval type-2 fuzzy based wide area power system stabilizer for inter-area oscillation damping. Microprocess. Microsyst. 2021, 83, 103957. [Google Scholar] [CrossRef]
- Rokni Nakhi, P.; Ahmadi Kamarposhti, M. Multi objective design of type II fuzzy based power system stabilizer for power system with wind farm turbine considering uncertainty. Int. Trans. Electr. Energy Syst. 2020, 30, e12285. [Google Scholar] [CrossRef]
- Chang, Y.; Niu, B.; Wang, H.; Zhang, L.; Ahmad, A.M.; Alassafi, M.O. Adaptive tracking control for nonlinear system in pure-feedback form with prescribed performance and unknown hysteresis. IMA J. Math. Control Inf. 2022, 39, 892–911. [Google Scholar] [CrossRef]
- Abido, M. Simulated annealing based approach to PSS and FACTS based stabilizer tuning. Int. J. Electr. Power Energy Syst. 2000, 22, 247–258. [Google Scholar] [CrossRef]
- Guesmi, T.; Farah, A.; Abdallah, H.; Ouali, A. Robust design of multimachine power system stabilizers based on improved non-dominated sorting genetic algorithms. Electr. Eng. 2018, 100, 1351–1363. [Google Scholar] [CrossRef]
- Dasu, B.; Sivakumar, M.; Srinivasarao, R. Interconnected multi-machine power system stabilizer design using whale optimization algorithm. Prot. Control Mod. Power Syst. 2019, 4, 2. [Google Scholar] [CrossRef]
- Mustapha, H.; Buhari, M.; Ahmad, A.S. An improved genetic algorithm based power system stabilizer for power system stabilization. In Proceedings of the 2019 IEEE AFRICON, Accra, Ghana, 25–27 September 2019. [Google Scholar]
- Majidabad, S.S.; Shandiz, H.; Hajizadeh, A. Nonlinear fractional-order power system stabilizer for multi-machine power systems based on sliding mode technique. Int. J. Robust Nonlinear Control 2015, 25, 1548–1568. [Google Scholar] [CrossRef]
- Liu, S.; Niu, B.; Zong, G.; Zhao, X.; Xu, N. Adaptive fixed-time hierarchical sliding mode control for switched under-actuated systems with dead-zone constraints via event-triggered strategy. Appl. Math. Comput. 2022, 435, 127441. [Google Scholar] [CrossRef]
- Farahani, M.; Ganjefar, S. Intelligent power system stabilizer design using adaptive fuzzy sliding mode controller. Neurocomputing 2017, 226, 135–144. [Google Scholar] [CrossRef]
- Al-Duwaish, H.N.; Al-Hamouz, Z.M. A neural network based adaptive sliding mode controller: Application to a power system stabilizer. Energy Convers. Manag. 2011, 52, 1533–1538. [Google Scholar] [CrossRef]
- Bingöl, Ö.; Güzey, H.M. Finite-Time Neuro-Sliding-Mode Controller Design for Quadrotor UAVs Carrying Suspended Payload. Drones 2022, 6, 311. [Google Scholar] [CrossRef]
- Zhao, Y.; Tang, F.; Zong, G.; Zhao, X.; Xu, N. Event-Based Adaptive Containment Control for Nonlinear Multiagent Systems With Periodic Disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 5049–5053. [Google Scholar] [CrossRef]
- Bingöl, Ö.; Güzey, H.M. Neuro sliding mode control of quadrotor UAVs carrying suspended payload. Adv. Robot. 2021, 35, 255–266. [Google Scholar] [CrossRef]
- Tan, J.; Liu, L.; Li, F.; Chen, Z.; Chen, G.Y.; Fang, F.; Guo, J.; He, M.; Zhou, X. Screening of endocrine disrupting potential of surface waters via an affinity-based biosensor in a rural community in the Yellow River Basin, China. Environ. Sci. Technol. 2022, 56, 14350–14360. [Google Scholar] [CrossRef]
- Lin, X.; Shi, X.; Li, S.; Nguang, S.K.; Zhang, L. Nonsingular fast terminal adaptive neuro-sliding mode control for spacecraft formation flying systems. Complexity 2020, 2020, 1–5. [Google Scholar] [CrossRef]
- Raja, B.M.; Houda, R.; Khadija, D.; Said, N.A. A discrete adaptive second order neuro sliding mode control for uncertain nonlinear system. In Proceedings of the 2019 19th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sousse, Tunisia, 24–26 March 2019; pp. 518–523. [Google Scholar]
- Ben Mohamed, R.; Dehri, K.; Elhajji, Z.; Nouri, A.S. A discrete terminal neuro-sliding mode control with adaptive switching gain for an uncertain nonlinear system. Iran. J. Sci. Technol. Trans. Electr. Eng. 2021, 8, 1–4. [Google Scholar] [CrossRef]
- Iranmehr, H.; Aazami, R.; Tavoosi, J.; Shirkhani, M.; Azizi, A.R.; Mohammadzadeh, A.; Mosavi, A.H.; Guo, W. Modeling the price of emergency power transmission lines in the reserve market due to the influence of renewable energies. Front. Energy Res. 2022, 9, 944. [Google Scholar] [CrossRef]
- Kenné, G.; Fotso, A.S.; Lamnabhi-Lagarrigue, F. A new adaptive control strategy for a class of nonlinear system using RBF neuro-sliding-mode technique: Application to SEIG wind turbine control system. Int. J. Control 2017, 90, 855–872. [Google Scholar] [CrossRef]
- Fang, Q.; Liu, X.; Zeng, K.; Zhang, X.; Zhou, M.; Du, J. Centrifuge modelling of tunnelling below existing twin tunnels with different types of support. Undergr. Space 2022, 7, 1125–1138. [Google Scholar] [CrossRef]
- Hiremath, R.; Moger, T. LVRT enhancement of DFIG-driven wind system using feed-forward neuro-sliding mode control. Open Eng. 2021, 11, 1000–1014. [Google Scholar] [CrossRef]
- Habib, B. Comparison Study between FPWM and NSVM Inverter in Neuro-Sliding Mode Control of Reactive and Active Power Control of a DFIG-based Wind Energy. Majlesi J. Energy Manag. 2017, 6. [Google Scholar]
- Ghanamijaber, M. A hybrid fuzzy-PID controller based on gray wolf optimization algorithm in power system. Evol. Syst. 2019, 10, 273–284. [Google Scholar] [CrossRef]
- Sokólski, P.; Rutkowski, T.; Ceran, B.; Horla, D. Złotecka, Power System Stabilizer as a Part of a Generator MPC Adaptive Predictive Control System. Energies 2021, 14, 6631. [Google Scholar] [CrossRef]
- Sreedivya, K.M.; Jeyanthy, P.A.; Devaraj, D. An effective AVR-PSS design for electromechanical oscillations damping in power system. In Proceedings of the 2019 IEEE International Conference on Clean Energy and Energy Efficient Electronics Circuit for Sustainable Development (INCCES), Krishnankoil, India, 18–20 December 2019; pp. 1–5. [Google Scholar]
- Liu, Z.; Zheng, Z.; Sudhoff, S.D.; Gu, C.; Li, Y. Reduction of common-mode voltage in multiphase two-level inverters using SPWM with phase-shifted carriers. IEEE Trans. Power Electron. 2015, 31, 6631–6645. [Google Scholar] [CrossRef]
- Cao, C.; Wang, J.; Kwok, D.; Cui, F.; Zhang, Z.; Zhao, D.; Li, M.J.; Zou, Q. webTWAS: A resource for disease candidate susceptibility genes identified by transcriptome-wide association study. Nucleic Acids Res. 2022, 50, 1123–1130. [Google Scholar] [CrossRef]
- Salgado, I.; Yañez, C.; Camacho, O.; Chairez, I. Adaptive control of discrete-time nonlinear systems by recurrent neural networks in quasi-sliding mode like regime. Int. J. Adapt. Control Signal Process. 2017, 31, 83–96. [Google Scholar] [CrossRef]
- Yuan, Z.; Li, X.; Wu, D.; Ban, X.; Wu, N.-Q.; Dai, H.-N.; Wang, H. Continuous-time prediction of industrial paste thickener system with differential ODE-net. IEEE/CAA J. Autom. Sin. 2022, 9, 686–698. [Google Scholar] [CrossRef]
- Li, P.; Yang, M.; Wu, Q. Confidence interval based distributionally robust real-time economic dispatch approach considering wind power accommodation risk. IEEE Trans. Sustain. Energy 2020, 12, 58–69. [Google Scholar] [CrossRef]
- Chaib, L.; Choucha, A.; Arif, S. Optimal design and tuning of novel fractional order PID power system stabilizer using a new metaheuristic Bat algorithm. Ain Shams Eng. J. 2017, 8, 113–125. [Google Scholar] [CrossRef] [Green Version]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, C.; Chi, E.; Guo, C.; Salah, M.M.; Shaker, A. A New Self-Tuning Deep Neuro-Sliding Mode Control for Multi-Machine Power System Stabilizer. Mathematics 2023, 11, 1616. https://doi.org/10.3390/math11071616
Gu C, Chi E, Guo C, Salah MM, Shaker A. A New Self-Tuning Deep Neuro-Sliding Mode Control for Multi-Machine Power System Stabilizer. Mathematics. 2023; 11(7):1616. https://doi.org/10.3390/math11071616
Chicago/Turabian StyleGu, Chan, Encheng Chi, Chujia Guo, Mostafa M. Salah, and Ahmed Shaker. 2023. "A New Self-Tuning Deep Neuro-Sliding Mode Control for Multi-Machine Power System Stabilizer" Mathematics 11, no. 7: 1616. https://doi.org/10.3390/math11071616