
Non-Fragile Fuzzy Tracking Control for Nonlinear Networked Systems with Dynamic Quantization and Randomly Occurring Gain Variations
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
2.1. T–S Fuzzy Model
2.2. Reference Model
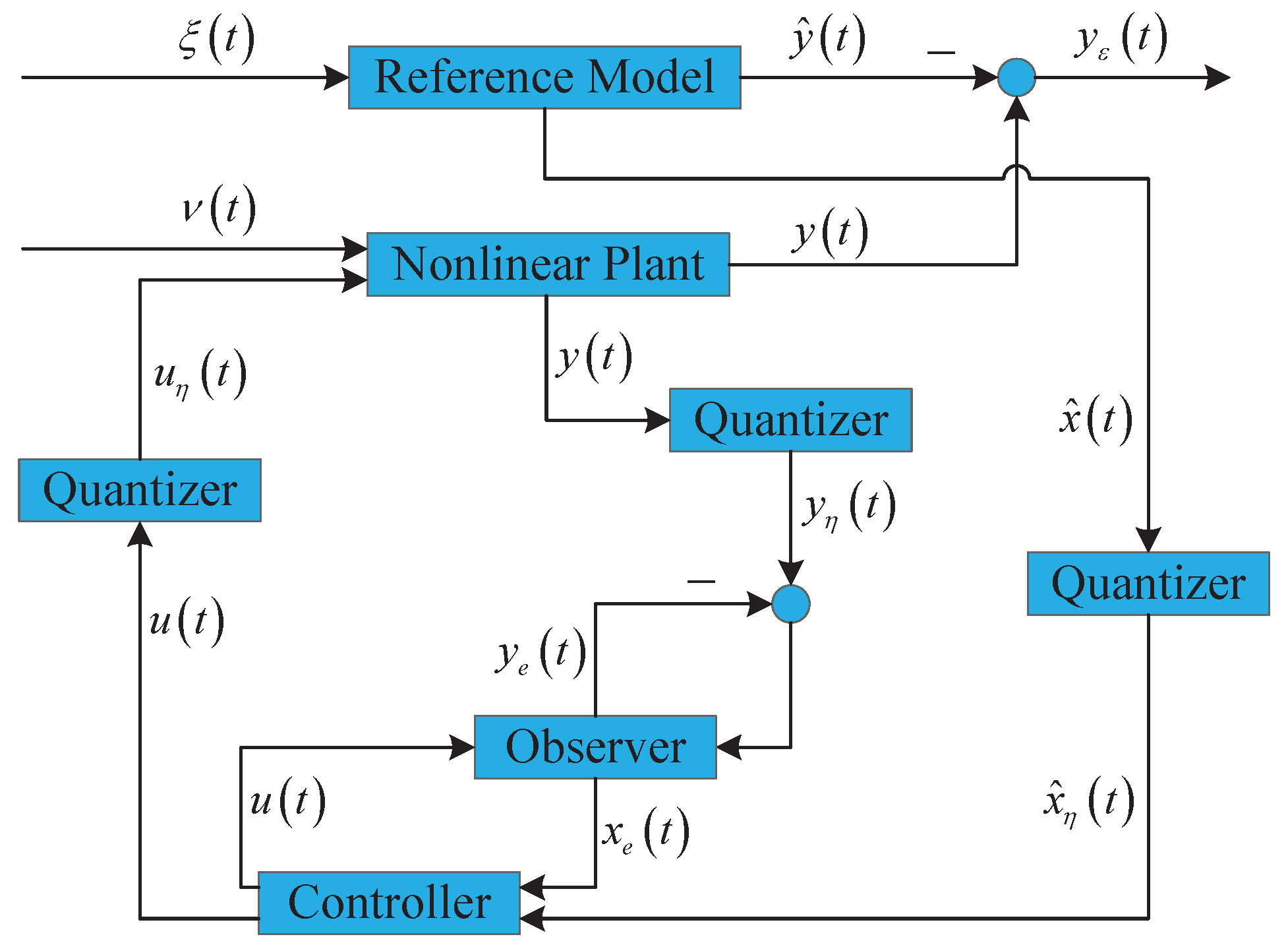
2.3. Observer-Based Output Feedback Tracking Controller
2.4. Dynamic Quantizers
2.5. Resulting System
3. Main Results
3.1. Tracking Performance Analysis
3.2. Non-Fragile Tracking Controller Design
4. Illustrative Example
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, L.; Gao, H.; Kaynak, O. Network-induced constraints in networked control systems—A survey. IEEE Trans. Ind. Inf. 2013, 9, 142–149. [Google Scholar] [CrossRef]
- Su, L.; Chesi, G. Robust stability of uncertain linear systems with input and output quantization and packet loss. Automatica 2018, 87, 267–273. [Google Scholar] [CrossRef]
- Gao, H.; Chen, T. A new approach to quantized feedback control systems. Automatica 2008, 44, 534–542. [Google Scholar] [CrossRef]
- Coutinho, D.F.; Fu, M.; de Souza, C.E. Input and output quantized feedback linear systems. IEEE Trans. Autom. Control 2010, 55, 761–766. [Google Scholar] [CrossRef]
- Liberzon, D. Hybrid feedback stabilization of systems with quantized signals. Automatica 2003, 39, 1543–1554. [Google Scholar] [CrossRef]
- Che, W.W.; Yang, G.H. State feedback H∞ control for quantized discrete-time systems. Asian J. Contr. 2008, 10, 718–723. [Google Scholar] [CrossRef]
- Zheng, B.C.; Yu, X.; Xue, Y. Quantized feedback sliding-mode control: An event-triggered approach. Automatica 2018, 91, 126–135. [Google Scholar] [CrossRef]
- Niu, Y.; Ho, D.W.C. Control strategy with adaptive quantizer’s parameters under digital communication channels. Automatica 2014, 50, 2665–2671. [Google Scholar] [CrossRef]
- Chang, X.H.; Xiong, J.; Li, Z.M.; Park, J.H. Quantized static output feedback control for discrete-time systems. IEEE Trans. Ind. Inf. 2018, 14, 3426–3435. [Google Scholar] [CrossRef]
- Tanaka, K.; Wang, H.O. Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, 15, 116–132. [Google Scholar] [CrossRef]
- Zhang, J.; Shi, P.; Qiu, J.; Nguang, S.K. A novel observer-based output feedback controller design for discrete-time fuzzy systems. IEEE Trans. Fuzzy Syst. 2015, 23, 223–229. [Google Scholar] [CrossRef]
- Chang, X.H.; Yang, G.H. Nonfragile H∞ filter design for T–S fuzzy systems in standard form. IEEE Trans. Ind. Electron. 2014, 61, 3448–3458. [Google Scholar] [CrossRef]
- Dong, J.; Yang, G.H. Observer-based output feedback control for discrete-time T–S fuzzy systems with partly immeasurable premise variables. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 98–110. [Google Scholar] [CrossRef]
- Chang, X.H.; Yang, G.H. A descriptor representation approach to observer-based H∞ control synthesis for discrete-time fuzzy systems. Fuzzy Sets Syst. 2011, 185, 38–51. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, B.Z.; Park, J.H. Non-fragile H∞ filtering for delayed Takagi-Sugeno fuzzy systems with randomly occurring gain variations. Fuzzy Sets Syst. 2017, 316, 99–116. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, D.; Chai, T. Guaranteed cost networked control for T–S fuzzy systems with time delays. IEEE Trans. Syst. Man Cybern. C 2007, 37, 160–172. [Google Scholar] [CrossRef]
- Yao, H.; Gao, F. Design of observer and dynamic output feedback control for fuzzy networked systems. Mathematics 2022, 11, 148. [Google Scholar] [CrossRef]
- Peng, C.; Yang, T.C. Communication-delay-distribution-dependent networked control for a class of T–S fuzzy systems. IEEE Trans. Fuzzy Syst. 2010, 18, 326–335. [Google Scholar] [CrossRef]
- Zheng, Q.; Xu, S.; Zhang, Z. Nonfragile H∞ control for uncertain Takagi-Sugeno fuzzy systems under digital communication channels and its application. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 3638–3647. [Google Scholar] [CrossRef]
- Shen, H.; Men, Y.; Wu, Z.G.; Cao, J.; Lu, G. Network-based quantized control for fuzzy singularly perturbed semi-Markov jump systems and its application. IEEE Trans. Circuits Syst. I Reg. Papers 2019, 66, 1130–1140. [Google Scholar] [CrossRef]
- Qiu, J.; Feng, G.; Gao, H. Observer-based piecewise affine output feedback controller synthesis of continuous-time T–S fuzzy affine dynamic systems using quantized measurements. IEEE Trans. Fuzzy Syst. 2012, 20, 1046–1062. [Google Scholar]
- Chang, X.H.; Yang, C.; Xiong, J. Quantized fuzzy output feedback H∞ control for nonlinear systems with adjustment of dynamic parameters. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2005–2015. [Google Scholar] [CrossRef]
- Zheng, Q.; Xu, S.; Du, B. Quantized guaranteed cost output feedback control for nonlinear networked control systems and its applications. IEEE Trans. Fuzzy Syst. 2022, 30, 2402–2411. [Google Scholar] [CrossRef]
- Pan, T.T.; Chang, X.H.; Liu, Y. Robust fuzzy feedback control for nonlinear systems with input quantization. IEEE Trans. Fuzzy Syst. 2022, 30, 4905–4914. [Google Scholar] [CrossRef]
- Chang, X.H.; Jin, X. Observer-based fuzzy feedback control for nonlinear systems subject to transmission signal quantization. Appl. Math. Comput. 2022, 414, 126657. [Google Scholar] [CrossRef]
- Chang, X.H.; Li, Z.M.; Park, J.H. Fuzzy generalized H2 filtering for nonlinear discrete-time systems with measurement quantization. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 2419–2430. [Google Scholar] [CrossRef]
- Li, Z.M.; Xiong, J. Event-triggered fuzzy filtering for nonlinear networked systems with dynamic quantization and stochastic cyber attacks. ISA Trans. 2022, 121, 53–62. [Google Scholar] [CrossRef]
- Gao, H.; Chen, T. Network-based H∞ output tracking control. IEEE Trans. Autom. Control 2008, 53, 655–667. [Google Scholar] [CrossRef]
- Peng, C.; Song, Y.; Xie, X.P.; Zhao, M.; Fei, M.R. Event-triggered output tracking control for wireless networked control systems with communication delays and data dropouts. IET Control Theory Appl. 2016, 10, 2195–2203. [Google Scholar] [CrossRef]
- Yan, H.; Hu, C.; Zhang, H.; Karimi, H.R.; Jiang, X.; Liu, M. H∞ output tracking control for networked systems with adaptively adjusted event-triggered scheme. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2050–2058. [Google Scholar] [CrossRef]
- Lian, K.Y.; Liou, J.J. Output tracking control for fuzzy systems via output feedback design. IEEE Trans. Fuzzy Syst. 2006, 14, 628–639. [Google Scholar] [CrossRef]
- Lin, C.; Wang, Q.G.; Lee, T.H. H∞ output tracking control for nonlinear systems via T–S fuzzy model approach. IEEE Trans. Syst. Man Cybern. B Cybern. 2006, 36, 450–457. [Google Scholar]
- Tseng, C.S.; Chen, B.S.; Uang, H.J. Fuzzy tracking control design for nonlinear dynamic systems via T–S fuzzy model. IEEE Trans. Fuzzy Syst. 2001, 9, 381–392. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Wu, C.; Jing, X.; Wu, L. Fuzzy tracking control for nonlinear networked systems. IEEE Trans. Cybern. 2017, 47, 2020–2031. [Google Scholar] [CrossRef]
- Zhang, D.; Han, Q.L.; Jia, X. Network-based output tracking control for a class of T–S fuzzy systems that can not be stabilized by nondelayed output feedback controllers. IEEE Trans. Cybern. 2015, 45, 1511–1524. [Google Scholar] [CrossRef]
- Zhang, D.; Han, Q.L.; Jia, X. Network-based output tracking control for T–S fuzzy systems using an event-triggered communication scheme. Fuzzy Sets Syst. 2015, 273, 26–48. [Google Scholar] [CrossRef]
- Li, Z.M.; Park, J.H. Dissipative fuzzy tracking control for nonlinear networked systems with quantization. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 5130–5141. [Google Scholar] [CrossRef]
- Li, Z.M.; Chang, X.H.; Park, J.H. Quantized static output feedback fuzzy tracking control for discrete-time nonlinear networked systems with asynchronous event-triggered constraints. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3820–3831. [Google Scholar] [CrossRef]
- Li, Z.M.; Chang, X.H.; Xiong, J. Event-based fuzzy tracking control for nonlinear networked systems subject to dynamic quantization. IEEE Trans. Fuzzy Syst. 2022. in press. Available online: https://ieeexplore.ieee.org/abstract/document/9839441 (accessed on 25 July 2022).
- Wu, L.; Yang, X.; Li, F. Nonfragile output tracking control of hypersonic air-breathing vehicles with an LPV model. IEEE/ASME Trans. Mechatron. 2013, 18, 1280–1288. [Google Scholar] [CrossRef]
- Keel, L.H.; Bhattacharyya, S.P. Robust, fragile, or optimal? IEEE Trans. Autom. Control 1997, 42, 1098–1105. [Google Scholar] [CrossRef]
- Wang, J.; Wu, J.; Cao, J.; Chadli, M.; Shen, H. Nonfragile output feedback tracking control for Markov jump fuzzy systems based on integral reinforcement learning scheme. IEEE Trans. Cybern. 2022. in press. Available online: https://ieeexplore.ieee.org/abstract/document/9911218 (accessed on 4 October 2022).
- Han, T.J.; Kim, H.S. Disturbance observer-based nonfragile fuzzy tracking control of a spacecraft. Adv. Space Res. 2022. in press. Available online: https://www.sciencedirect.com/science/article/abs/pii/S0273117722010754 (accessed on 25 November 2022).
- Ghorbel, C.; Benhadj Braiek, N. Nonfragile H∞ tracking control strategies for classes of linear and bilinear uncertain Takagi-Sugeno fuzzy systems. Trans. Inst. Meas. Control 2022, 44, 2166–2176. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y.; Zhang, Z. Global fixed-time stabilization of switched nonlinear systems: A time-varying scaling transformation approach. IEEE Trans. Circuits Syst. II Exp. Briefs 2019, 66, 1890–1894. [Google Scholar] [CrossRef]
- Gao, F.; Chen, C.C.; Huang, J.; Wu, Y. Prescribed-time stabilization of uncertain planar nonlinear systems with output constraints. IEEE Trans. Circuits Syst. II Exp. Briefs 2022, 69, 2887–2891. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Lu, C.; Wang, H. Non-Fragile Fuzzy Tracking Control for Nonlinear Networked Systems with Dynamic Quantization and Randomly Occurring Gain Variations. Mathematics 2023, 11, 1116. https://doi.org/10.3390/math11051116
Li Z, Lu C, Wang H. Non-Fragile Fuzzy Tracking Control for Nonlinear Networked Systems with Dynamic Quantization and Randomly Occurring Gain Variations. Mathematics. 2023; 11(5):1116. https://doi.org/10.3390/math11051116
Chicago/Turabian StyleLi, Zhimin, Chengming Lu, and Hongyu Wang. 2023. "Non-Fragile Fuzzy Tracking Control for Nonlinear Networked Systems with Dynamic Quantization and Randomly Occurring Gain Variations" Mathematics 11, no. 5: 1116. https://doi.org/10.3390/math11051116