1. Introduction
Modern numerical continuous global optimization problems deal with high dimensionality and the number of decision variables is still increasing because of the need to take into account more internal and external factors when designing and analyzing complex systems. This is also facilitated by the development of high-performance hardware and algorithms. “Black-box” large-scale global optimization (LSGO) is one of the most important and hardest types of optimization problems. The search space of LSGO problems exponentially grows and many state-of-the-art optimization algorithms, including evolutionary algorithms, lose their efficiency. However, the issue cannot be solved by straightforward increasing the number of objective function evaluations.
Many researchers note that the definition of a LSGO problem depends on the nature of the problem and changes over time and with the development of optimization approaches. For example, the global optimization of Morse clusters is known as a hard real-world optimization problem. The best-found solutions for Morse clusters are collected in the Cambridge Energy Landscape Database [
1]. At the moment, the database contains the highest value equal to 147 atoms, which corresponds to 441 continuous decision variables only. The most popular LSGO benchmark was proposed within the IEEE Congress on Evolutionary Computation and is used for the estimation and comparison of new LSGO approaches. The benchmark contains 1000-dimensional LSGO problems. There exist solutions for real-world problems with many thousands of decision variables.
The general LSGO optimization problem is defined as (
1):
here
f is an objective function,
are box-constrained decision variables. We do not impose any restrictions on the type of the objective function, such as linearity, continuity, convexity, and the need to be defined at all points requested by the search algorithm. In the general case, the objective function is defined algorithmically, there is no information about the properties of its landscape, thus the objective function is a “black-box” model.
As previously mentioned, the performance of many black-box global optimization algorithms cannot be improved by only increasing the budget of function evaluations when solving LSGO problems. One of challenges for researchers in the LSGO field is the development of new approaches, which can deal with the high dimensionality. Various LSGO algorithms that use fundamentally different ideas and demonstrate different performances for different classes of LSGO problems have been proposed. When solving a specific LSGO problem, a researcher must choose an appropriate LSGO algorithm and fine-tune its parameters. Moreover, the algorithm can require different settings at different states of the optimization process (for example, at exploration and exploitation stages). Thus, the development of self-adaptive approaches for solving hard LSGO problem is an actual research task.
In this study, an adaptive hybrid approach that combines three general conceptions, such as problem decomposition using cooperative co-evolution (CC), global search based on differential evolution (DE), and local search is proposed. This approach demonstrates performance comparable with LSGO competition winners and outperforms most of them. At the same time, it demonstrates the same high efficiency for different classes of LSGO problems, which makes the proposed approach preferable for “black-box” LSGO problems when it is not possible to prove the choice of an appropriate search algorithm.
The rest of the paper is organized as follows.
Section 2 presents the related works for reviewing state-of-the-art in the field of LSGO and motivates designing a hybrid approach.
Section 3 and
Section 4 describe the proposed approach, experimental setups, some general top-level settings, and implementation. In
Section 5, the experimental results, analysis, and discussion of the algorithm dynamics and convergence, and the comparison of the results with state-of-the-art and competition-winner approaches are presented. In conclusion, the proposed methods and the obtained results are summarized and some further ideas are suggested.
2. Related Work
The complexity of real-world optimization problems has grown in recent years and is still growing. The class of global “black-box” optimization problems for which the high dimensionally causes the loss in the performance of a search algorithm is known as Large Scale Global Optimization or LSGO. Well-known experts in the field of LSGO, Mohammad Nabi Omidvar and Xiaodong Li, note that the term “large scale” is not definitively determined because the dimensionality of problems in LSGO grows over time, and it can also be different in different application areas. Many modern metaheuristics, including EAs, consider LSGO problems with 1000 real variables.
One of the first discussions on LSGO have been proposed within the special session of the IEEE CEC conference in 2008 [
2,
3]. Since 2008, the LSGO scientific community has proposed the LSGO benchmark for evaluating and comparing LSGO algorithms. The first benchmark in 2008 had only 7 test problems, including 2 unimodal and 5 multimodal optimization problems [
2]. The CEC LSGO 2010 benchmark was extended with test problems grouped by the separability property and contained 20 optimization problems, including 3 fully separable, 15 partially non-separable, and 2 fully non-separable functions [
4]. Finally, within the IEEE CEC 2013 special session and completion, a new benchmark has been proposed, and it is still used today and is known as a hard benchmark set for many state-of-the-art LSGO techniques [
5]. The CEC LSGO 2013 benchmark contains 3 fully separable, 8 partially additive non-separable functions, 3 functions with overlapping components, and 1 fully non-separable function. In 2018, a new online Toolkit for Automatic Comparison of Optimizers (TACO) has been proposed for a fair independent comparison of LSGO algorithms [
6]. In 2021, the TACO database includes the results of 25 leading and competition-winner LSGO algorithms.
Some extensive studies with surveys of the current state of LSGO and systematizations of LSGO techniques have been proposed in [
7,
8]. In [
9], LSGO is highlighted as one of the urgent domains of bio-inspired computation. The recent work on the LSGO review proposes a large summary of the state of affairs and accumulated experience [
10,
11]. Within the proposed systematizations, the following main approaches are developing:
Random (static or dynamic) problem decomposition using cooperative co-evolution,
Learning-based decomposition using cooperative co-evolution,
Modifications of the standard evolutionary algorithms without problem decomposition, including hybrid memetic approaches.
The first group of approaches is the largest one. Decomposition divides the search space into a set of lower-dimensional subspaces by grouping decision variables (or subcomponents), which are expected to be easier to explore independently by an optimization algorithm. For aggregating the whole candidate-solution from subcomponents, the cooperative co-evolution framework is used. Therefore, a decomposition-based approach involves three general components, namely, a decomposition algorithm, a subcomponent optimizer, and a cooperative co-evolution technique. The number of subcomponents and appropriate decomposition depend on the properties of the objective function and are unknown beforehand. Thus, decomposition mechanisms are also a part of the search approach and must be adaptive. Despite the fact that we optimize lower-dimensional subproblems, each decomposition can generate a complex landscape, and the subcomponent optimizer should be also adaptive for demonstrating the high performance for any decomposition. The standard co-evolution framework is also a subject for modification. Nevertheless, the decomposition-based approaches demonstrate high performance for a wide range of LSGO problems.
Learning-based techniques are aimed to identify the interaction of variables and to group them into separable subcomponents. The approaches usually perform well with fully separable and partially non-separable problems only. At the same time, some recent algorithms can also efficiently deal with overlapping components, but still demonstrate poor performance with fully non-separable problems (for example, CC-RDG3, who is the 2019 LSGO competition winner [
12]).
Hybrid memetic approaches usually demonstrate high performance for all types of LSGO problems (for example, SHADE-ILS, the 2018 LSGO competition winner [
13]). It is worth noting the Multiple Offspring Sampling (MOS) algorithm [
14], which was the LSGO competition winner for 5 years (2013–2018). MOS proposes a high-level relay hybrid approach for adaptive switching between global and local search algorithms (one of the modifications uses switching only between multiple local search algorithms).
We will briefly review some state-of-the-art and competition-winner LSGO algorithms for analyzing the general approaches implemented in the algorithms.
2.1. Approaches without Problem Decomposition
Dynamic Multi-Swarm Particle Swarm Optimizer (DMS-PSO) [
15] is one of the early approaches investigated using the CEC LSGO 2008 benchmark. DMS-PSO uses a multi-population scheme and combines PSO with a modified neighborhood topology [
16] and the BFGS Quasi-Newton method for local search. Canonical Differential Evolutionary Particle Swarm Optimization (C-DEEPSO) [
17] is based on a combination of DE and PSO algorithms. Variable Mesh Optimization Differential Evolution (VMODE) [
18] uses the standard DE as the core optimizer and the population distributed in nodes of a mesh. The mesh nodes can be redistributed for maintaining diversity and for guiding the optimizer to the best-found solutions.
Multi-trajectory Search (MTS) [
19] uses a combination of coordinate-wise random searches titled MTS-LS1, MTS-LS2, and MTS-LS3. On each iteration, coordinates are ranked based on the objective improvements, the next step starts with the coordinate that has provided the highest increment of the objective function. Despite the simple idea, MTS demonstrates high performance with LSGO problems and is used as the main local search algorithm in many hybrid memetic approaches.
Iterative Hybridization of Differential Evolution with Local Search (IHDELS) [
20] is one of the first competition-winner memetic evolutionary algorithms (the 2nd place in the 2015 IEEE CEC LSGO competition). IHDELS uses self-adaptive DE (SaDE) [
21] and two local search algorithms: L-BFGSB [
22] and MTS-LS1 [
19].
Multiple Offspring Sampling (MOS) in the original paper used a combination of Restart Covariance Matrix Adaptation Evolution Strategy With Increasing Population Size (IPOPCMA-ES) [
23] with a restart and variable population size and the standard DE [
24]. The 2013 version of MOS [
25] uses a hybridization of 3 algorithms: MTS LS1, Solis and Wets, and GA.
Success-History Based Parameter Adaptation for Differential Evolution with Iterative Local Search (SHADE-ILS) [
13] is the winner of the 2018 competition. SHADE-ILS combines SHADE [
26] for global search, MTS LS1 and L-BFGS-B for local search, and restart strategies.
Hybrid of Minimum Population Search and Covariance Matrix Adaptation Evolution Strategy (MPS-CMA-ES) [
27,
28] has taken second place in the 2019 competition.
The most recent algorithm selection wizard, titled as automated black-box optimization (ABBO), can select one or several optimization algorithms from a very large number of base algorithms based on some input information about the considered optimization problem [
29]. ABBO uses three types of selection techniques: passive algorithm selection, active algorithm selection, and chaining (several algorithms run in turn). ABBO outperforms many state-of-the-art algorithms on LSGO benchmarks.
2.2. Decomposition-Based Approaches with Static Grouping
A Cooperative Co-evolutionary approach for Genetic Algorithm (CCGA-1 and CCGA-2) [
30] is the first attempt for improving the standard EA (namely, a binary GA) using the coordinate-wise decomposition. In [
31,
32], CC was implemented for improving evolution programming (Fast Evolutionary Programming with Cooperative Co-evolution, FEPCC). In Cooperative Co-evolutionary Differential Evolution (CCDE) [
33], the approach was modified for using subcomponents with many variables. There were proposed two modifications: CCDE-H with 2 subcomponents and CCDE-O with the number of subcomponents equal to the number of variables.
Some more complicated decompositions have been proposed for PSO algorithms. Cooperative Approach to Particle Swarm Optimization (CPSO) [
34] performed grouping into k subcomponents (CPSO-Sk) or combined CPSO-Sk with the standard PSO (CPSO-Hk). A similar idea was used in Cooperative Bacterial Foraging Optimization (CBFO) [
35] and Cooperative Artificial Bee Colony (CABC) [
36]. Both approaches had two modifications: CBFO-S, CBFO-H, CABC-H, and CABC-S.
2.3. Decomposition-Based Approaches with Random Grouping
In random grouping approaches, subcomponents vary during the search process. One of the first approaches DECC-G [
37] has proposed a combination of random grouping and Self-adaptive Differential Evolution with Neighborhood Search (SaNSDE) [
38] that demonstrates high performance for LSGO benchmarks and is still used as a base-line for evaluating and comparing new LSGO approaches.
In Multilevel Cooperative Co-evolution (MLCC) [
39], SaNSDE is combined with modified random grouping, which uses a distribution of probabilities for choosing subcomponents from a decomposition pool based on the success of the previous choices. In DECC-ML, a modification of MLCC with a better optimizer for the more frequent random grouping was proposed [
40]. Cooperatively Co-evolving Particle Swarms algorithms (CCPSO and CCPSO2) [
41,
42] use random grouping with PSO. CCPSO2 applies a random search for dynamic regrouping variables. In Cooperative Co-evolution Orthogonal Artificial Bee Colony (CCOABC) [
43], random grouping is combined with the ABC algorithm.
Memetic Framework for Solving Large-scale Optimization Problems (MLSHADE-SPA) [
44] is a multi-algorithms approach, which iteratively applies Success History-based Differential Evolution with Linear Population Size Reduction (L-SHADE) [
45], two self-adaptive DE algorithms, and a modified version of MTS. All algorithms are applied for the whole optimization problem and for subcomponents. MLSHADE-SPA has taken second place in the 2018 IEEE CEC LSGO competition.
2.4. Learning-Based Grouping Approaches
The idea behind algorithms of this type is to identify the interaction of decision variables and group them into the same subcomponent. For some separable test problems, the algorithms can identify true subcomponents.
Correlation-based Adaptive Variable Partitioning (CCEA-AVP) [
46] evaluates the correlation matrix for the best solutions (in the original algorithm, half of the population is used). Variables for which values of the correlation coefficient are greater than a threshold are placed in one group. In [
47], CCEA-AVP uses NSGA-2 as the core optimizer. Contribution Based Cooperative Co-evolution (CBCC) applies SaNSDE with Delta Grouping and Ideal Grouping algorithms [
48]. Each subcomponent is optimized using the number of function evaluations based on the improvement of the objective function obtained by this component. The delta grouping approach is also applied in Cooperative Co-evolution with Delta Grouping (DECC-DML) [
49]. In Cooperative Co-evolution with Variable Interaction Learning (CCVIL) [
50], groups are formed iteratively starting with one-dimensional subcomponents, which are combined if the interaction between them is detected. CCVIL uses JADE [
51] for optimizing subcomponents. Dependency Identification with Memetic Algorithm (DIMA) [
52] applies the local search algorithm proposed in [
53] for detecting the interaction of variables.
Differential grouping is based on the mathematical definition of a partially additively separable function that is used for the identification of the interaction of variables. Cooperative Co-Evolution with Differential Grouping (DECC-DG) [
54], Extended Differential Grouping (DECC-XDG) [
55], and modified DECC-DG2 [
56] use the SaNSDE algorithm for evolving subcomponents. A competitive divide and-conquer algorithm (CC-GDG-CMAES) [
57] combines differential grouping with the CMA-ES optimizer. In Differential Grouping with Spectral Clustering (DGSC) [
58], SaNSDE is applied for subcomponents discovered using clustering of the identified interactions in variables.
Some original approaches are proposed in Scaling Up Covariance Matrix Adaptation Evolution Strategy (CC-CMA-ES) [
59], Cooperative co-evolution with Sensitivity Analysis-based Budget Assignment Strategy (SACC) [
60], Bi-space Interactive Cooperative Co-evolutionary Algorithm (BICCA) [
61], and Cooperative Co-evolution with Soft Grouping (SGCC) [
62]. All approaches, except CC-CMA-ES, use self-adaptive DE algorithms.
A recursive decomposition method (RDG) [
63] proposes a new approach for better differential grouping. CC-RDG3 [
12] combines CMA-ES with RDG for the efficient identification of overlapping subcomponents. Authors have shown that CC-RDG3 can greatly improve LSGO algorithms. CC-RDG3 has taken first place in the 2019 IEEE CEC LSGO competition and it is still the leading LSGO approach. An Incremental Recursive Ranking Grouping (IRRG) is one of the recent approaches that uses monotonicity checking for more accurate identification of variable linkages [
64]. IRRG requires more fitness function evaluations than RDG3, but never reports false linkages.
2.5. LSGO State-of-the-Art Algorithms
We have summarized all approaches mentioned above in
Table 1 to highlight their main features, such as the type of decomposition, and the global and local search algorithms used. As we can see from the proposed review, many state-of-the-art LSGO algorithms contain, in different combinations, three main components: problem decomposition with cooperative co-evolution, a global optimizer, and a local search algorithm. The majority of the algorithms apply a self-adaptive DE as the global search technique. In
Table 2, all participants of the IEEE CEC LSGO competitions of different years are collected. In the table, one can find out the winners of the competitions and what components (CC, DE, and LS) are implemented in the algorithms (a “plus” sign indicates that the corresponding components are used).
As we can see from
Table 2, 10 of 14 participants use DE as a core global optimizer, 7 algorithms apply problem decomposition with CC, and 5 algorithms are memetic. All winners use DE and all winners, except CC-RDG3, use local search. The current leader, CC-RDG3, applies problem decomposition with CC. From a historical perspective, we can notice that leading approaches improve global and local algorithms and develop more advanced frameworks for problem decomposition and adaptive control of the interaction of global and local search. This fact motivates us to design new approaches that combine all 3 components.
3. The Proposed Approach
As we can see from the review in the previous section, the majority of state-of-the-art approaches use CC. At the same time, many CC approaches apply an additional learning stage before the main subcomponents’ optimization stage. The learning stage is used for identifying interconnected and independent variables. The identification of non-separable groups of variables usually takes a sufficiently large number of function evaluations (FEVs), which could be utilized for the main optimization process. However, the finding of all non-separable groups does not guarantee the high efficiency of solving the obtained optimization sub-problems.
The proposed approach uses an adaptive change of the number of subcomponents, which leads to a dynamic redistribution of the use of computational resources. The set of values of the number of subcomponents is predefined and it is a parameter of the algorithm, which can be set based on the limitations of FEVs. As it was shown in [
65,
66], it is better to use different decompositions for different stages of the optimization process while exploring different regions of the search space instead of using the only decomposition even it is correct. We have discovered that, in general, an optimizer better operates small subcomponents at the early stages and the whole solution vector at the final stage, when a basin of a global optimum is discovered. Additionally, the way of adaptive changing the number of subcomponents can vary for different types of LSGO problems.
We will use the following algorithm for adaptive change of the number of subcomponents. We will run many optimizers, which use decompositions with subcomponents of different sizes. Each algorithm uses its number of FEVs based on its success in the previous generations. Thus, we dynamically redistribute resources in favor of a more preferable decomposition variant.
A set of M values of the number of subcomponents is defined as , where all elements should be different, i.e., . At the initialization stage, for each of M algorithms, we assign equal resources defined as the number of generations (). After all resources are exhausted by algorithms, we start a new cycle by redistributing the resources. In each cycle, algorithms are applied consequently in random order.
At the end of the run of each algorithm, we evaluate the improvement rate (
2):
here
is the best-found solution before the run, and
is the best-found solution after the run, and
.
After each cycle, all algorithms are ranked by their improvement rates. The best algorithm increases its resource by generations, which is a sum of generations subtracted from resources of all the rest algorithms. For all algorithms, we define for preventing the situation when the current-winner algorithm takes all resources and eliminates all other participants.
In the proposed approach, we will run the MTS-LS1 algorithm after CC-based SHADE. Usually, MTS-LS1 can find a new best-found solution that becomes far from other individuals in the population. In this case, SHADE cannot improve the best-found solution for a long time but improves the average fitness in the population. Criterion (
2) becomes insensitive to differences in the behavior of algorithms if the improving rate is calculated using the best-found solution. To overcome this difficulty, we will calculate the improving rate using the median fitness before and after an algorithm run using (
3) instead of (
2).
here
is the median fitness of individuals in the population, and
.
We will use the following approach for changing the number of generations assigned for each algorithm in the cooperation (
4)–(
8):
here
is a set of indexes of algorithms with the best improving rate,
is the number of algorithms with the best improving rate,
is a pool of resources for redistribution, and
.
We will use SHADE as a core optimizer for subcomponents in CC-based algorithms. In our review, we have shown that almost all competition winners and state-of-the-art algorithms use one of the modifications of DE. The main benefit of the SHADE algorithm in solving “black-box” optimization problems is that it has only two control parameters, which can be automatically tuned during the optimization process [
67].
The main parameters of DE (scale factor F and crossover rate ) in SHADE are self-configuring. SHADE uses a historical memory, which contains H pairs of the parameters from the previous generations. A mutant vector is created using a random pair of the parameters from the historical memory. When applying SHADE with CC, we will use specific parameters and F for each subcomponent.
SHADE, like many other DE algorithms, uses an external archive for saving some promising solutions from the previous generations. SHADE records the parameter values and the corresponding function increments when a better solution is found. After each generation, SHADE calculates new values of the control parameters using the weighted Lehmer mean [
67]. New calculated values of
and
F are placed in the historical memory.
SHADE uses the current-to-pbest/1 mutation scheme. The archived solutions can be chosen and reused at the mutation stage for maintaining the population diversity.
Our experimental results have shown that the use of independent populations and archives for each of the algorithms does not increase the overall performance of the proposed approach. In this work, all algorithms in the cooperation use the same population and archive.
One of the important control parameters of EA-based algorithms is the population size. A large population is more preferable at the exploration stage, when the algorithm converges, it loses the population diversity and the population size can be increased. If the variance of coordinates is high (individuals are well distributed in the search space), we reduce the population size and drop out randomly chosen solutions except the best one. We will use an adaptive size of the population based on the analysis of the diversity. The following diversity measure (
9) is used [
68]:
here
is the population size,
n is the dimensionality of the objective function,
is the average value of the
j-th variable of all individuals in the population.
After each cycle, we define a new population size for each algorithm using (
10)–(
13).
here
is relative diversity,
is a relative spend of the FEV budget (
),
is the required value of
,
, and
are low and upper bounds for the population size.
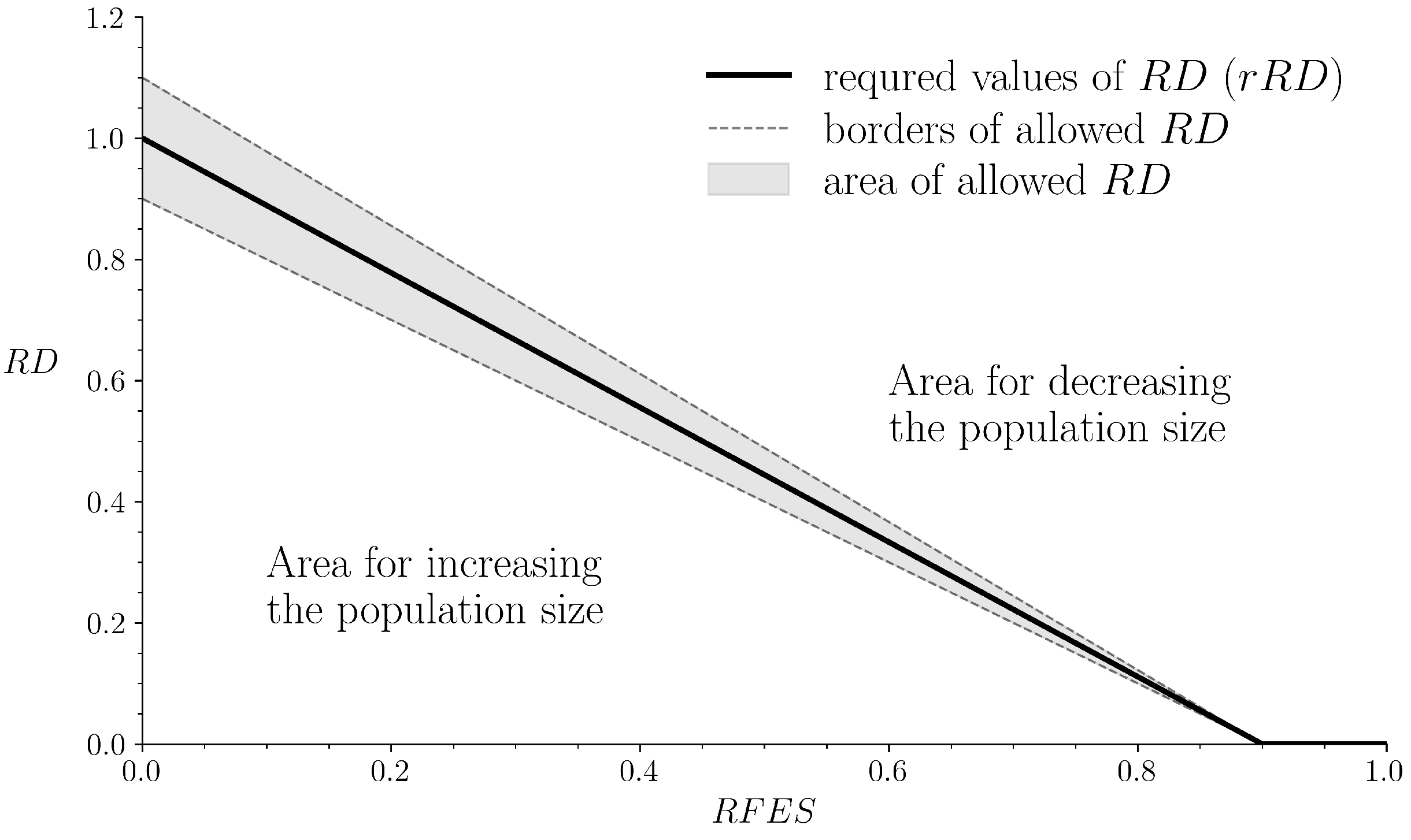
The relationship between
and
is presented in
Figure 1.
If the variance of coordinates is high (individuals are well distributed in the search space), we reduce the population size and drop out randomly chosen solutions except the best one. If the variance is low (individuals are concentrated in some region of the search space), we increase the population size by adding new random solutions. The approach tries to keep relative diversity close to , which linearly decreases with spending FEVs.
The proposed above ideas are implemented in our new algorithm titled COSACC-LS1. One of the hyper-parameters of COSACC-LS1 is the number of algorithms with different subcomponents (M). Because of the high computational cost of LSGO experiments, in this research we have tried and the following combinations of the number of subcomponents: , , , , , , , and . Thereafter, we will use the notation “COSACC-LS1 ”, where x, y, and z stands for the number of subcomponents, which are used in three DE algorithms: CC-SHADE(x), CC-SHADE(y), and CC-SHADE(z).
We have tried different mutation schemes and have obtained that the best performance of COSACC-LS1 is reached using the following scheme (
14):
here,
is a mutant vector,
is the scale factor,
is a random solution chosen from the
p best solutions,
is an individual chosen using the tournament selection from the population (the tournament size is 2),
is a random solution chosen from the union of the current population and the archive, and all solutions chosen for performing mutation must be different, i.e.,
.
The size of the archive is set two times larger than the initial population size. The size of historical memory in SHADE is set to 6 (the value is defined using grid search).
We have chosen MTS-LS1 for implementing local search in COSACC, because it demonstrates high performance in solving LSGO problems both alone and when applied with a global search algorithm [
19]. We use the following settings for MTS-LS1. The maximum number of FEVs is 25000 (the value is defined by numerical experiments). MTS-LS1 searches along each
i-th coordinate using the search range
. The initialization of
is the same as in the original MTS:
, where
is low and high bounds for the i-th variable. If a better solution is not found using the current value of
, it is reduced
. If
becomes less than 1E-18 (the original threshold was 1E-15), the value is reinitialized.
MTS-LS1 is applied after each main cycle starting with the current best-found solution until maximum FEVs are reached.
The initial number of generations for all algorithms is 15, the minimum value is 5, respectively. After a cycle, we will add
generation to
G for the algorithm with the highest improving rate. All other algorithms will reduce the number of generations by one. The initial population size is 100, minimum and maximum values are 25 and 200, respectively. After the algorithm spends 90% of its computational resource, the population size is set to its minimum value as proposed in [
68] (in this work the value is 25).
The whole implementation scheme for the proposed approach is presented using pseudocode in Algorithm 1.
| Algorithm 1 The general scheme of COSACC-LS1 |
Require: The number of algorithms M in CC, the number of subcomponents for each algorithm, n, , , , , , , . Ensure: ▹ Using Equation ( 9) for all do end for while do for all do for do ▹ Equation ( 10) ▹ Equation ( 13) end for end for for all do ▹ Equation ( 8) end for end while
|
6. Discussion
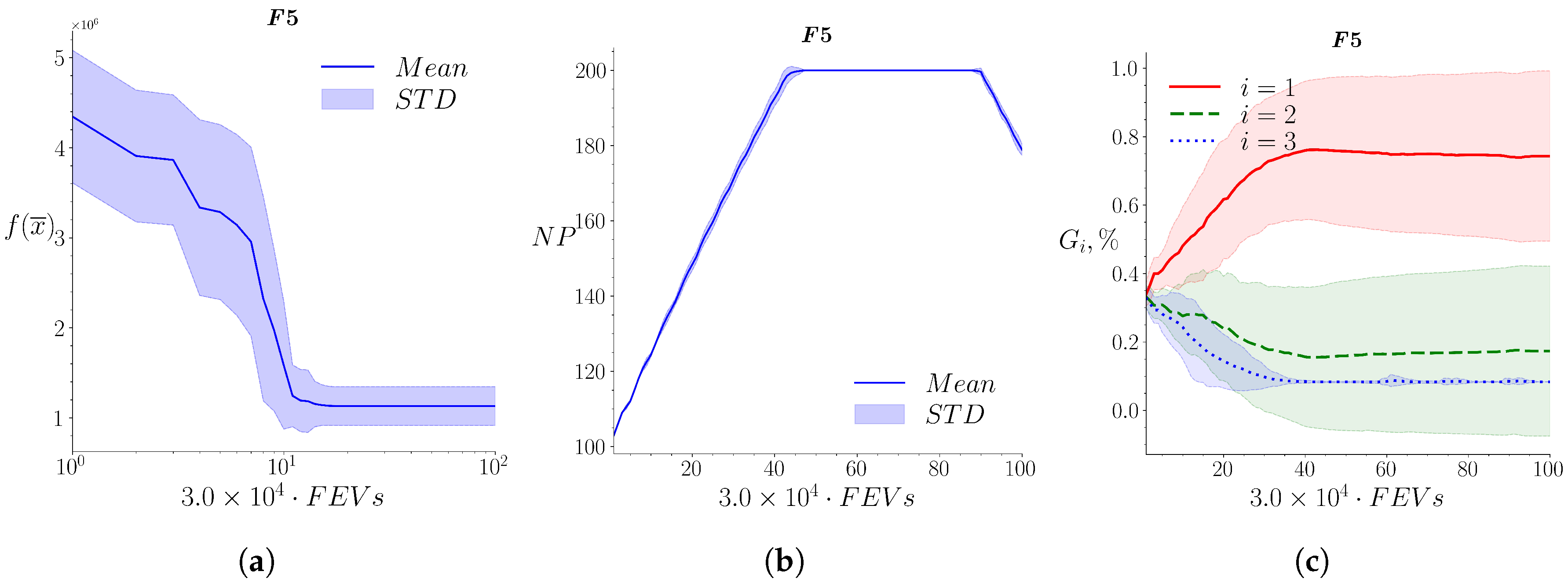
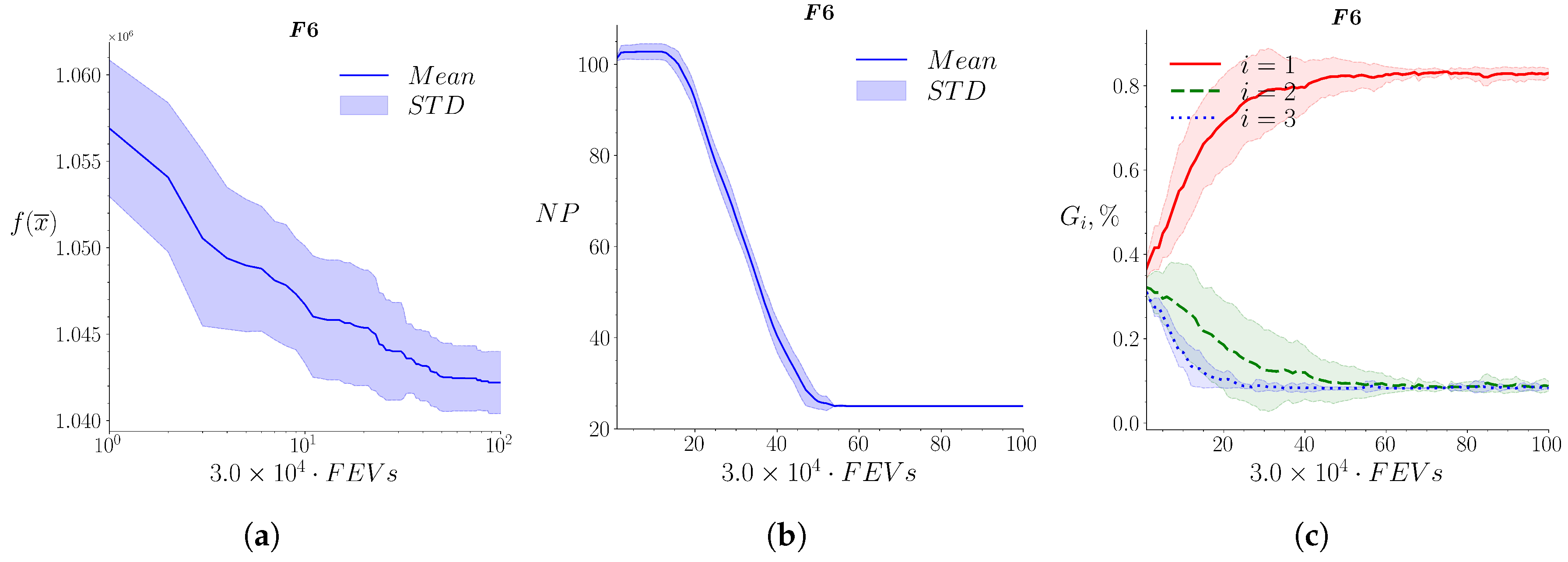
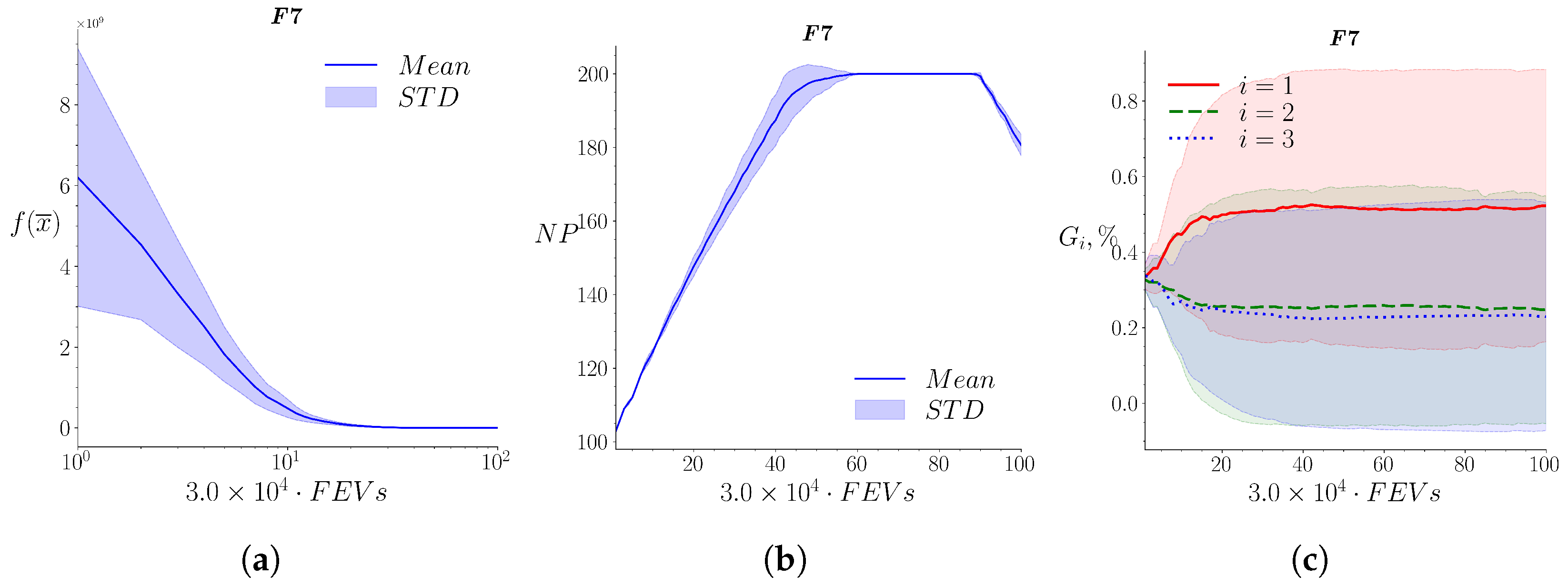
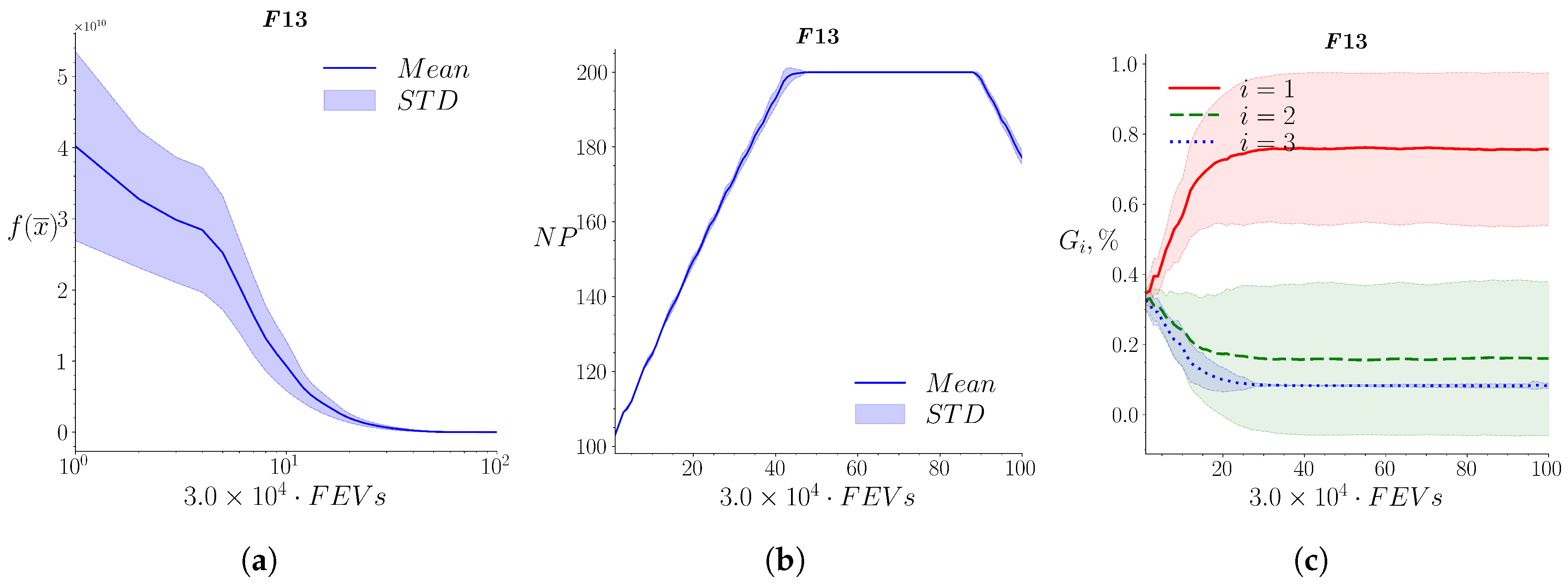
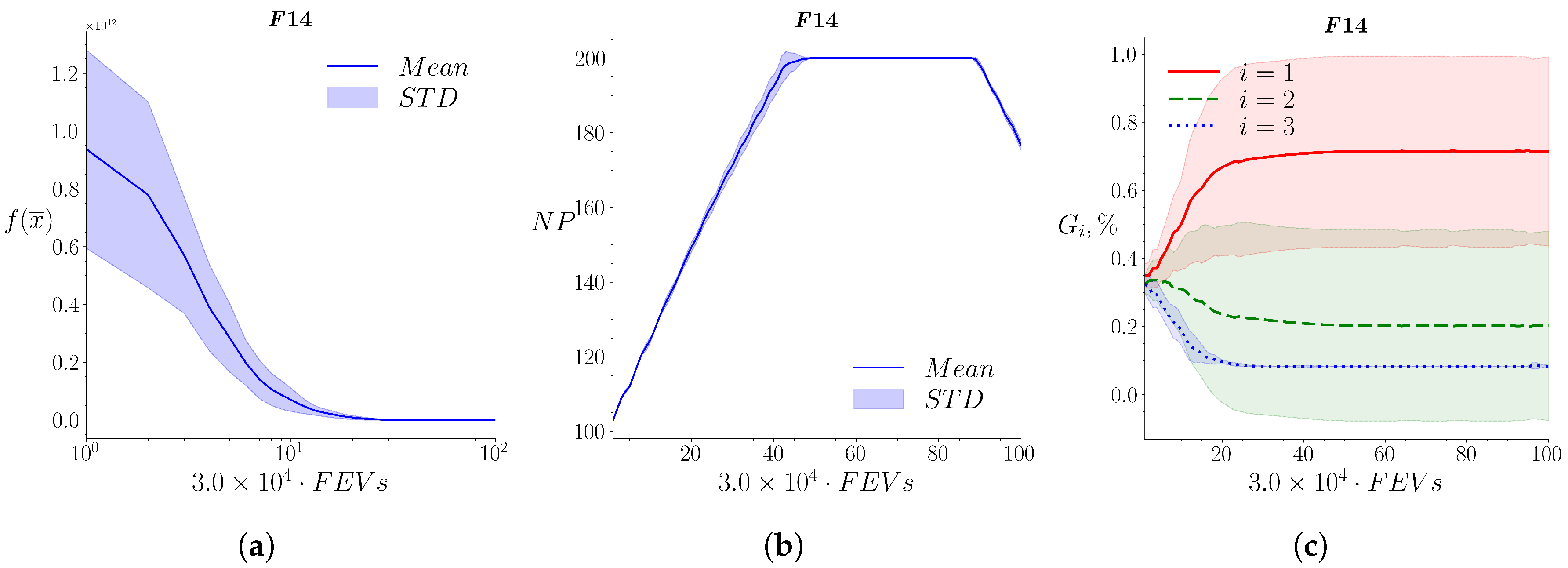
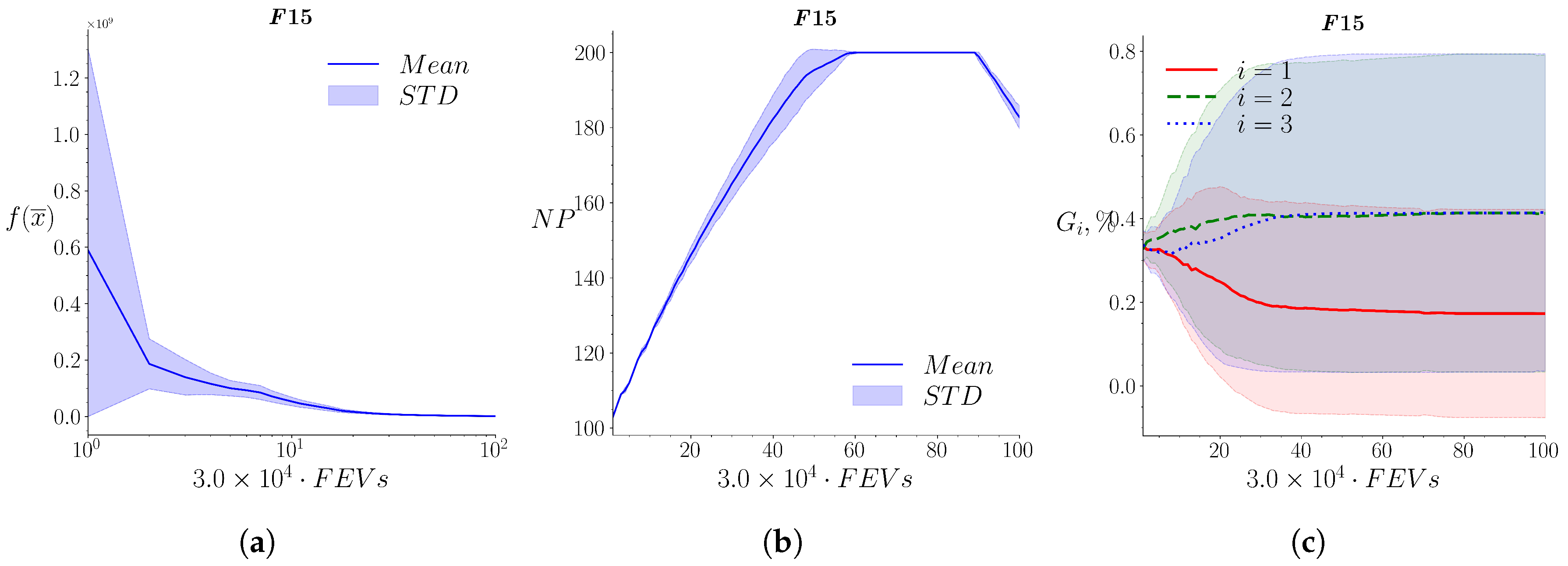
In this section, we have analyzed 3 general situations in the algorithm behavior based on plots for F3, F8, and F10 problems.
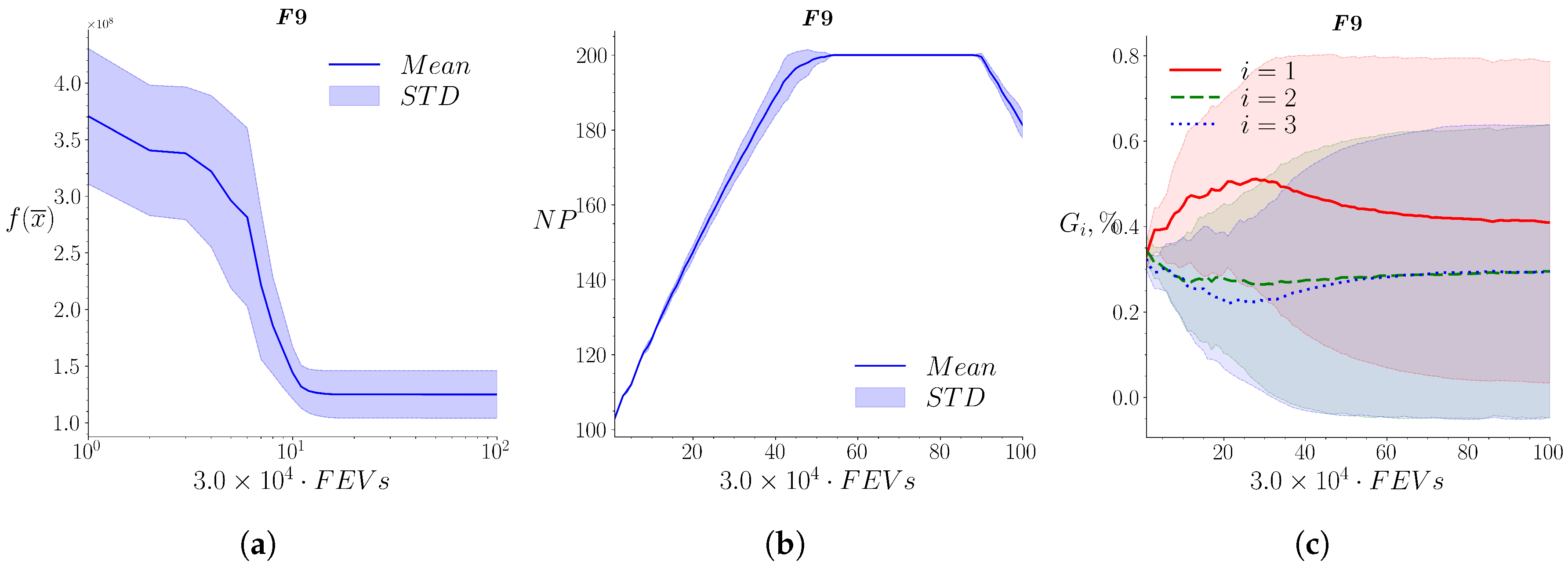
LSGO problems are hard for many search techniques when they optimize the complete solution vector, and the problem decomposition can ease this issue. In our previous studies, we have discovered that the cooperation of multiple algorithms with a different number of subcomponents usually demonstrates the following usage of decompositions. At the initial generations, the best performance is obtained using many subcomponents of small sizes. Such component-wise search performs the exploration strategy. After that, the approach usually chooses algorithms with a smaller number of subcomponents and at the final generations, it optimizes the complete solution vector. Optimization without decomposition tries to improve the final solution and performs the exploitation strategy [
65]. A similar behavior we can see for COSACC-LS1.
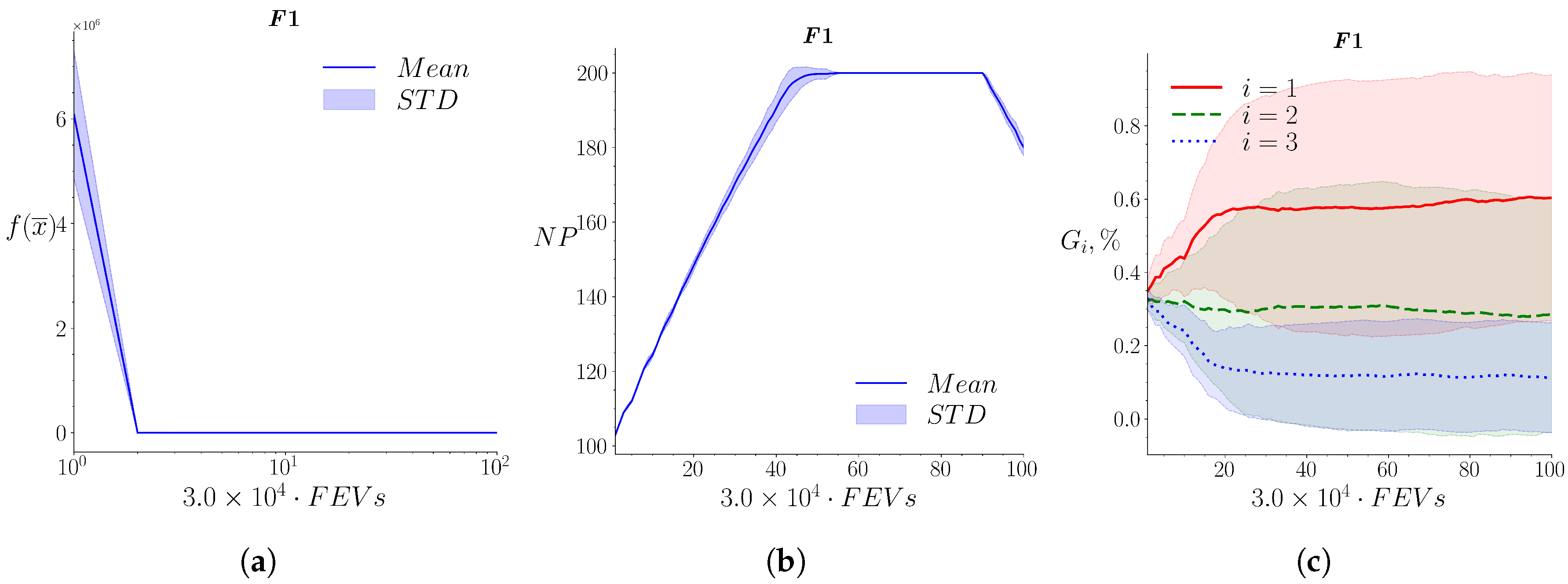
Figure A3 (see
Appendix A) shows the dynamics of the algorithms on the F3 problem. F3 is a fully separable problem based on the Ackley function. At the same time, the problem is one of the hardest in the benchmark. The basin of global optimum is narrow. F3 has a huge number of local optima with almost the same values, which cover most of the search space.
As we can see in
Figure A3a, the algorithm demonstrates fast convergence at the initial generations and after that, there are no significant improvements in the best-found value. The population size at the initial generations is big because the population diversity (
) becomes less than the required relative diversity (
). This is the result of the fast convergence, and the algorithm tries to increase the population size up to the threshold value (
Figure A3b). When the algorithm falls into stagnation, individuals save their positions, and the diversity becomes greater than
, thus the population size decreases. As we can see from low STD values, the situation is repeated in every run. The resource redistribution plots (
Figure A3c) show that at the initial generations the algorithm prefers to use many subcomponents, but when it falls into stagnation, the algorithm takes this as the end of the exploration and gives resources for optimizing the complete solution vector.
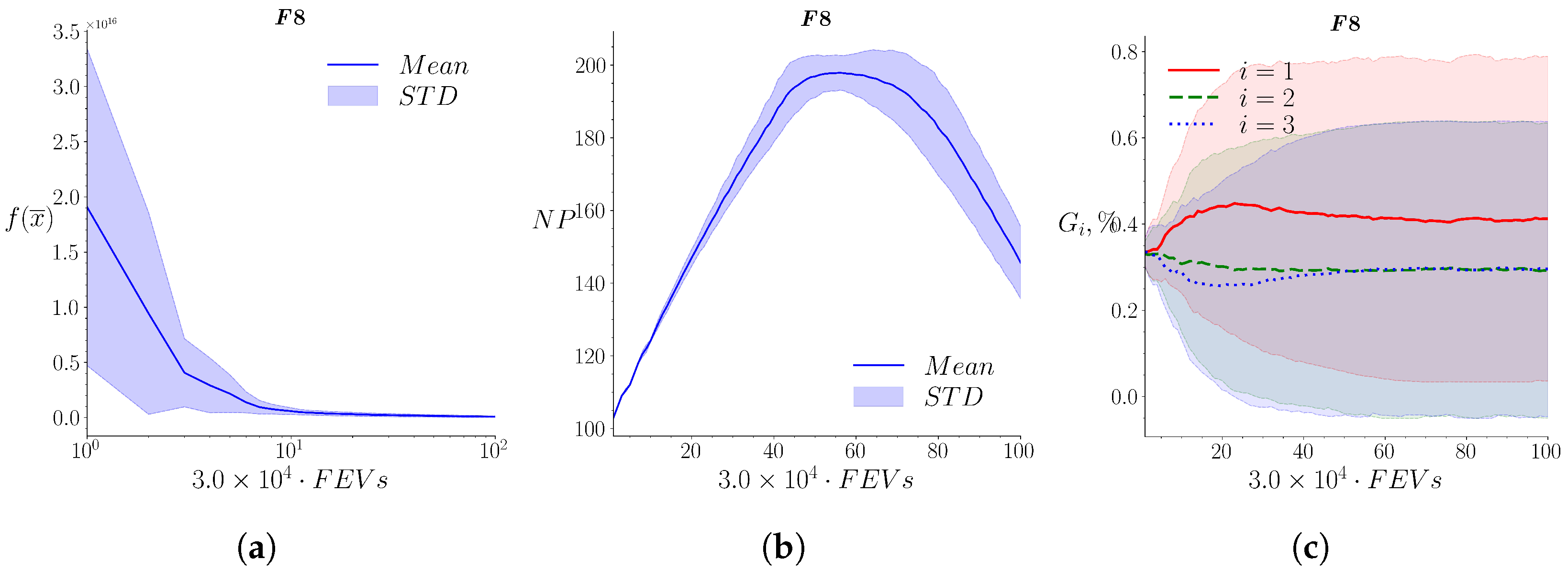
Figure A8 shows the dynamics of the algorithms on the F8 problem, which is a combination of 20 non-separable shifted and rotated elliptic functions. The problem is assumed to be a good test function for decomposition-based approaches, but each subcomponent is a hard optimization problem, which is non-separable and has local irregularities.
As we can see in
Figure A8a, the proposed approach demonstrates good convergence at the beginning of the optimization process and then stagnates.
Figure A8b shows that the fast convergence leads to a loss in diversity (
) and the algorithm increases the population size until 50% of FEVs is reached. In the middle of the budget spend, individuals have almost the same fitness values and do not improve the best-found value (plateau area in
Figure A8b). Finally, the diversity (
) becomes less than the required relative diversity (
) and the population size decreases. In contrast with the results on F3, before the algorithm falls into stagnation, the fast improvements in the objective lead to an increase in the population size for preventing local convergence.
Figure A8c shows that the algorithm distributes computational resources almost in equal portions on average. We can see an example of the true cooperative search when all component algorithms support each other. The standard deviation of the redistribution is high because the algorithm permanently adapts
values in the run.
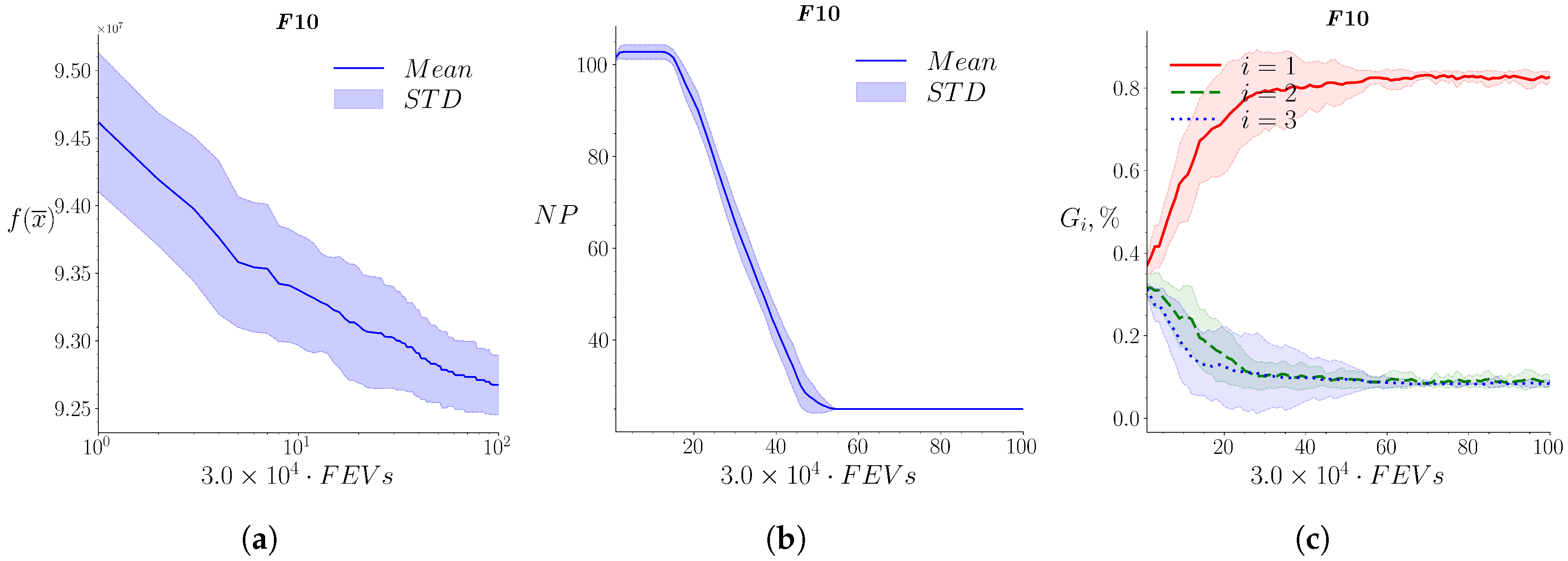
Figure A10 presents the convergence on the F10 problem. F10 is a combination of 20 non-separable shifted and rotated Ackey’s functions. As it was said previously, the Ackley function is one of the hardest in the benchmark and all Ackley-based problems are also very challenging tasks for LSGO approaches.
As we can in
Figure A10a, the algorithm improves the fitness value permanently during the run. At the same time, the relative value of the improvements is low, and coordinates of individuals remain almost the same. The
value becomes less than
at the early generations and the algorithm decreases the population size (
Figure A10b). As we have mentioned previously, slow convergence and stagnation usually are the result of the end of the exploration stage and the algorithm prefers to optimize the complete solution vector instead of decomposition-based subcomponents. As we can see in
Figure A10c, COSACC-LS1 gives all resources to the component algorithm with no decomposition.
Here it should be noted that in all experiments all component algorithms have a minimum guarantee amount of the computational resource. Even when one of the algorithms is leading, this can still be the result of the cooperation of multiple decompositions, and their small contribution essentially increases the performance of the leading algorithm.
As we can see from the presented convergence plots, COSACC-LS1 demonstrates the self-configuration capability. The approach can adaptively select the best decomposition option using redistribution of the computational resource. Different behavior for different LSGO problems ensures that COSACC-LS1 adapts to the topology of the given objective function. Another feature of the proposed approach is the adaptive control of the population size that maintains the population diversity and prevents the premature convergence.
Finally, the results of COSACC-LS1 have been compared with state-of-the-art approaches using the TACO online database. For the comparison, we have selected all algorithms, which were winners and prize-winners of all previous IEEE CEC LSGO competitions: CC-CMA-ES, CC-RDG3, IHDELS, MLSHADE-SPA, MOS, MPS, SGCC, and SHADEILS (see
Table 2). Additionally, we have added DECC-G as it is used as a baseline in the majority of studies and experimental comparisons.
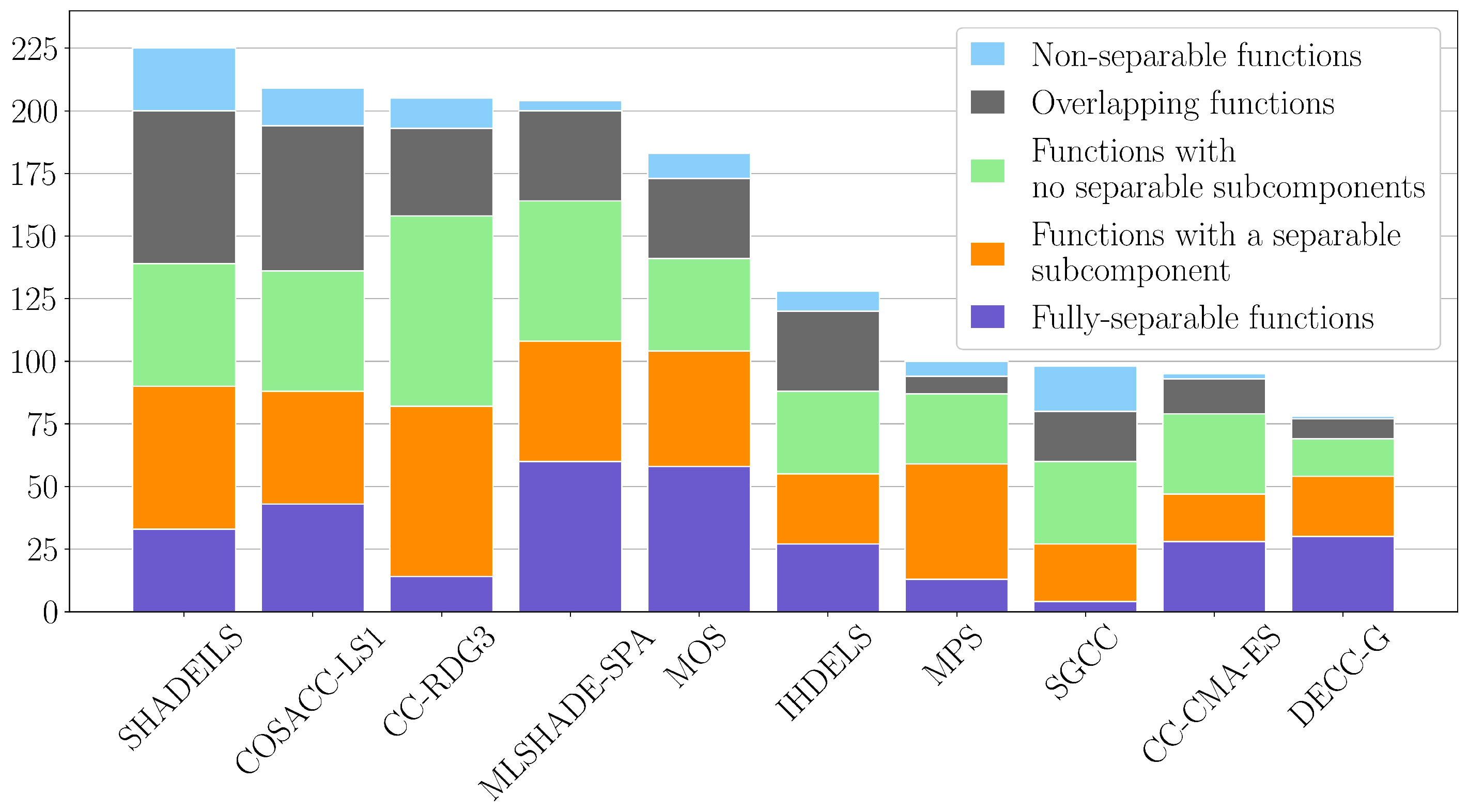
Table 5 and
Figure 3 show the results of the comparison. For all algorithms, we can see the sum of scores obtained on all benchmark problems and the sum of scores for each type of LSGO problems. The following notation for classes of LSGO problems is used: non-separable functions (Class 1), overlapping functions (Class 2), functions with no separable subcomponents (Class 3), functions with a separable subcomponent (Class 4), and fully-separable functions (Class 5).
The LSGO benchmark contains only one fully non-separable problem and three problems with overlapping components, which are the hardest problems. At the same time, an algorithm can obtain high summary scores if it has high scores for the type of LSGO problem, which contains many problems.
As we can see from the comparison, CC-RDG3, SHADE-SPA, and MOS have average scores for non-separable and overlapping problems but perform well for other types of LSGO problems. SGCC is the second-best in solving non-separable problems and yields in solving all the rest. SHADEILS is still the competition winner, but it demonstrates low performance when solving fully separable problems because it does not use any decomposition approach that can improve the results for this type.
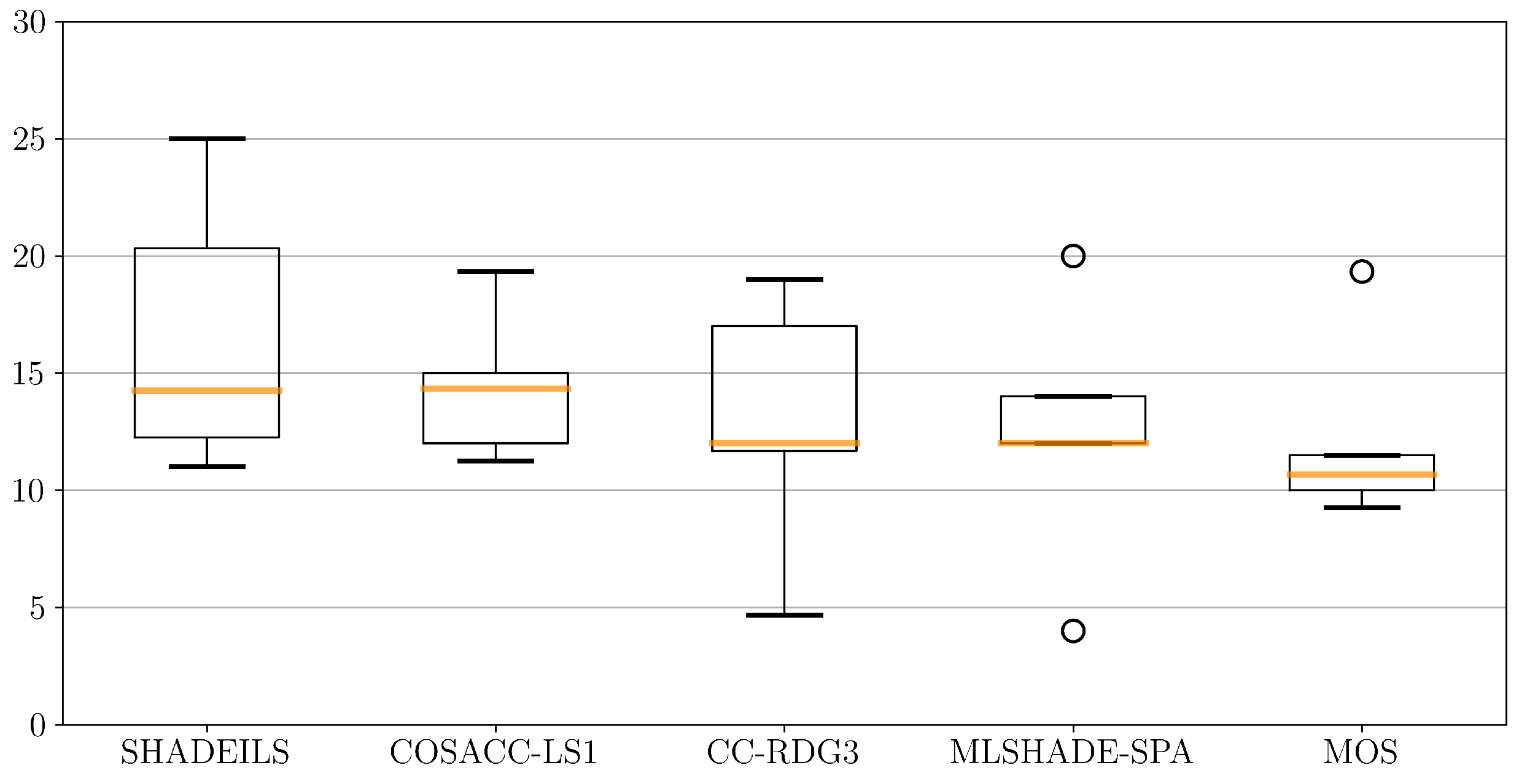
To better investigate the results for each class of LSGO problems, we have adjusted the given scores by the number of problems of each class.
Table 6 shows the results adjusted for the number of problems in each class.
Figure 4 demonstrates the variance of scores for the 5 best algorithms. MLSHADE-SPA and MOS obtain high scores for fully-separable functions (outliers in
Figure 4), although the results for all other classes have low variance, they are below median values of leading approaches. Median values of SHADEILS and COSACC-LS1 are close, but, as we can see, COSACC-LS1 has less variance thus the results are more stable. We can see that the variance in SHADEILS is towards larger ranks, at the same time this is true only with this benchmark set, because the approach is fine-tuned for the benchmark.
Taking into account the number of problems of each type, we can conclude that the proposed algorithm performs well with all types of LSGO problems. This fact makes COSACC-LS1 preferable in solving “black-box” LSGO problems when information on the problem type is not available. At the same time, COSACC-LS1 proposes a general framework for hybridization of multiple problem decomposition schemes, a global optimizer, and a local search algorithm, thus it has great potential for further improving its performance by applying other component approaches.
7. Conclusions
In this paper, a framework for solving LSGO problems has been proposed and a new optimization algorithm COSACC-LS1 based on the framework has been designed and investigated. The performance of COSACC-LS1 has been evaluated and compared with state-of-the-art approaches using the IEEE CEC LSGO 2013 benchmark and the TACO database. The proposed approach outperforms all LSGO competition winners except for one approach—SHADEILS. At the same time, COSACC-LS1 performs well with all types of LSGO problems, while SHADEILS shows poor results on fully-separable problems.
COSACC-LS1 proposed an original hybridization of three main LSGO techniques: CC, DE, and LS. In this work, we have applied SHADE as a DE component, MTS LS1 as LS, and a new approach for the adaptive selection of problem decomposition (several variants with different sizes of subcomponents). The proposed framework does not specify the exact choice of component algorithms, and the user may apply any global and local search algorithm. In that sense, the proposed approach has potential for improvement. In our further research we will examine the proposed framework with other stochastic population-based metaheuristics.
Interaction of three CC-based algorithms demonstrates high performance due to adaptive redistribution of computational resources. We have visualized the redistribution and have found that the approach can adapt to a new environment (new landscape of a LSGO problem). Instead of selecting one variant of decomposition, the interaction allows the component algorithm with the least amount of resources to still participate in the optimization process, and we can see that the algorithm contributes to the optimization process in some regions of the search space.
The well-known “No free lunch” theorem says that it is not possible to choose one optimization algorithm that performs well for all types and instances of optimization problems. At the same time, we can relax the theorem by introducing self-adaptive control of multiple approaches. The approach can adaptively design an effective algorithm (by giving more computations to the best component algorithm) for a specific optimization problem, as well as for a specific region of the search space within the optimization process.
Even though the LSGO benchmark contains many types of LSGO problems, many real-world optimization problems are not well studied and can require fine adjustment of some COSACC-LS1 parameters. In further work, we will address the issue of developing an approach for online adaptation of the internal parameters of the subcomponent optimizers.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}