

Optimal Location and Sizing of PV Generation Units in Electrical Networks to Reduce the Total Annual Operating Costs: An Application of the Crow Search Algorithm

 , ,
, ,  , and
, and
Abstract
:1. Introduction
1.1. General Context
1.2. State of the Art
1.3. Motivations, Contributions, and Scope
- A thorough description of the mathematical model that represents the problem of optimally locating and sizing PV generation units in electrical systems. This model has, as the objective function, the reduction in the total annual operating costs and observes the set of constraints that represent the behavior of electrical networks in a DG scenario.
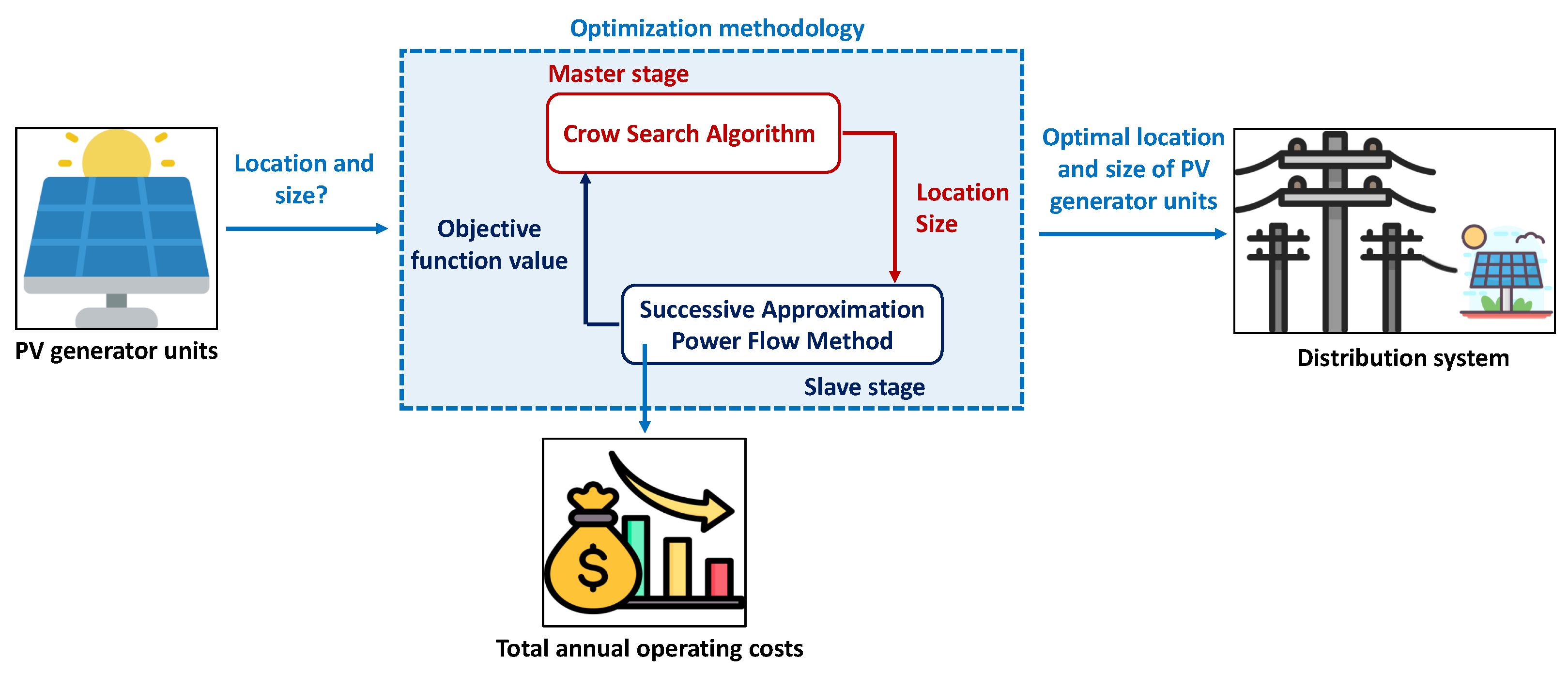
- A new master–slave methodology to solve the MINLP model that represents the problem under study. In this methodology, the master stage uses a Discrete–Continuous version of the Crow Search algorithm (DCCSA) to define the set of nodes where the PV generation units will be installed (location), as well as their corresponding nominal power (sizing). Meanwhile, the slave stage employs the successive approximation power flow method to evaluate the total annual operating costs of the network.
- A new master–slave methodology that finds a global optimal solution to the problem of optimally locating and sizing PV generation units in electrical systems and produces the best results in terms of solution quality and repeatability.
1.4. Structure of the Paper
2. Mathematical Formulation
2.1. Formulation of the Objective Function
2.2. Set of Constraints
2.3. Model Interpretation
3. Proposed Solution Methodology
3.1. Proposed Codification
3.2. Master Stage: The Discrete–Continuous Version of the Crow Search Algorithm (DCCSA)
- ✓
- Crows live in flocks.
- ✓
- Crows remember where they hide their food.
- ✓
- Crows follow other crows to steal their food.
- ✓
- Crows protect their hiding places from theft via stochastic processes.
3.2.1. Initial Population
3.2.2. Crows’ Movement
- 1
- Scenario 1: SearchIn this scenario, crow j is unaware that crow i is following it. Hence, i can get close to the cache of crow j and updates its position in the solution space. This new position can be modeled mathematically as follows:where is a random number between 0 and 1, generated with a uniform distribution, and is the flight length of crow i. As per [23], small values of allow for a local exploration of the solution space (close to ), whereas large values of allow for a global exploration of the solution space (far from ).
- 2
- Scenario 2: EvasionIn this scenario, crow j is aware that crow i is following it. Hence, to prevent its hidden food from being stolen, it tries to fool crow i by moving to a random position in the solution space.
3.2.3. Memory Updating
3.2.4. General Implementation of the DCCSA
| Algorithm 1: Crow search algorithm used to solve optimization problems |
| 1. Define parameters , , , , , , and |
| 2. Generate the initial population using Equation (16) |
| 3. Calculate the fitness function value (see Equation (24)) of each individual |
| 4. Initialize the memory () of each crow (i) |
| 5. fordo |
 |
| 14. Result: The best solution is found for , and its fitness function is . |
3.3. Slave Stage: Successive Approximation Power Flow Method
4. Test Systems
4.1. First Test Feeder: 33-Node Test System
4.2. Second Test Feeder: 69-Node Test System
4.3. Calculation of the Objective Function
5. Numerical Results and Discussion
5.1. DCCSA Parameters
5.2. Results Obtained in the First Test System under Analysis
5.2.1. Numerical Results
5.2.2. Statistical Analysis
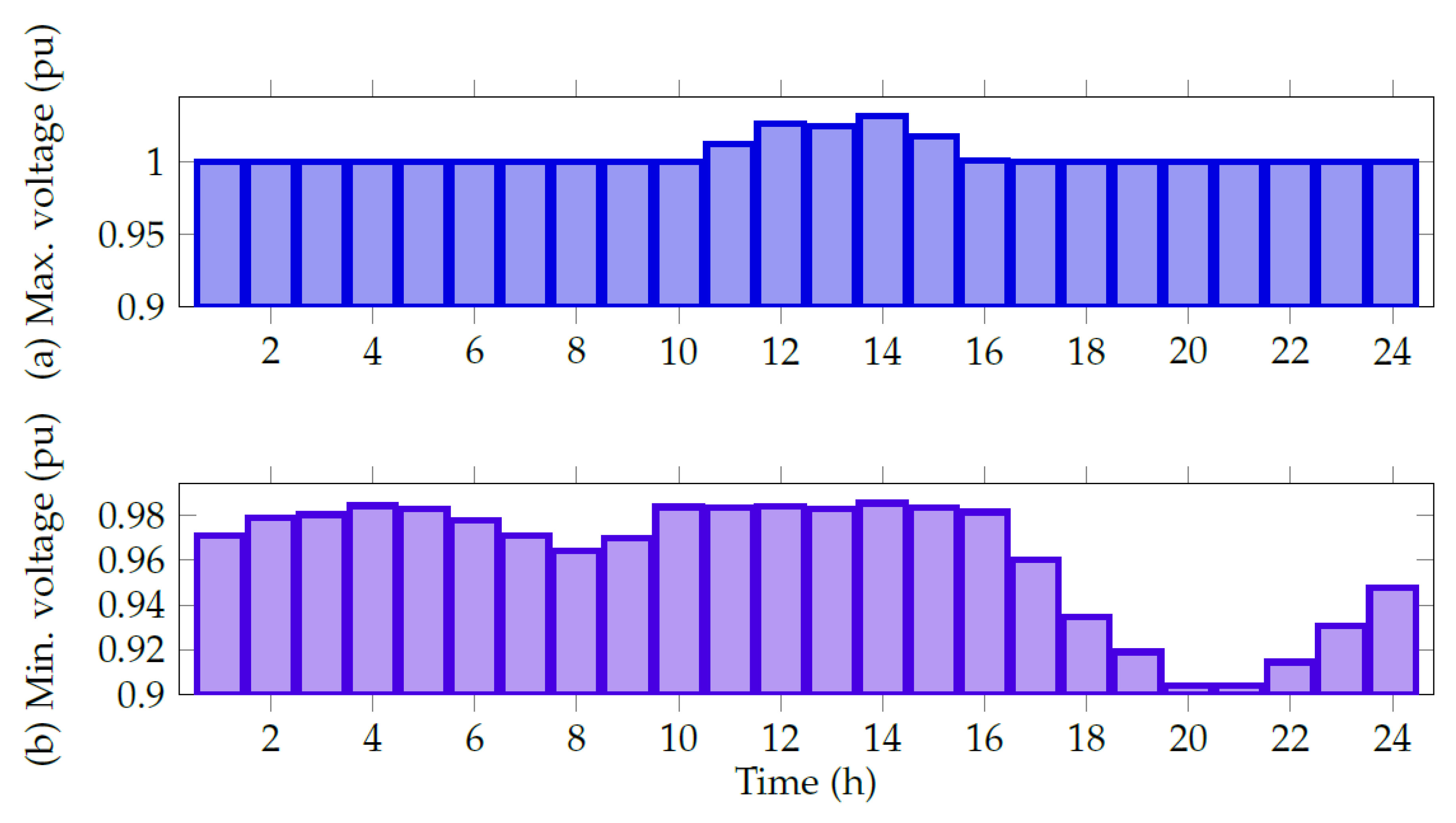
5.2.3. Feasibility Check
5.3. Results Obtained in the Second Test System under Analysis
5.3.1. Numerical Results
5.3.2. Statistical Analysis
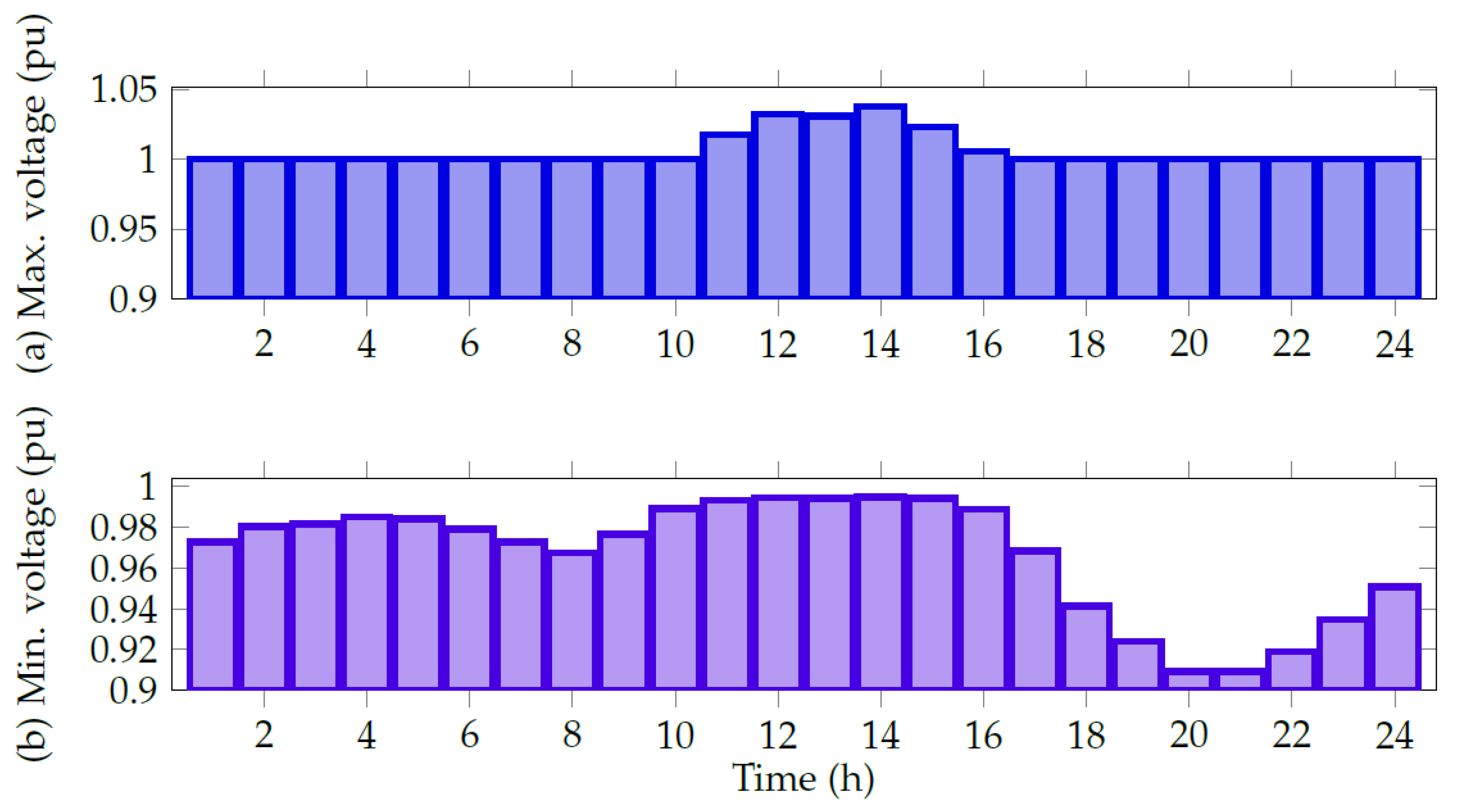
5.3.3. Feasibility Check
6. Conclusions and Future Work
- ✓
- The DCCSA managed to reduce the total annual operating costs by approximately 1,000,783.62 USD/year and 1,053,276.87 USD/year in the 33- and 69-node test systems, respectively. These values represent reductions of 27.0449% and 27.1589%. These are the largest reductions found for the problem of locating and sizing PV generation units, which indicates that the overall optimal solutions to this problem for both test systems are 2,699,671.76 USD/year and 2,824,923.05 USD/year, respectively.
- ✓
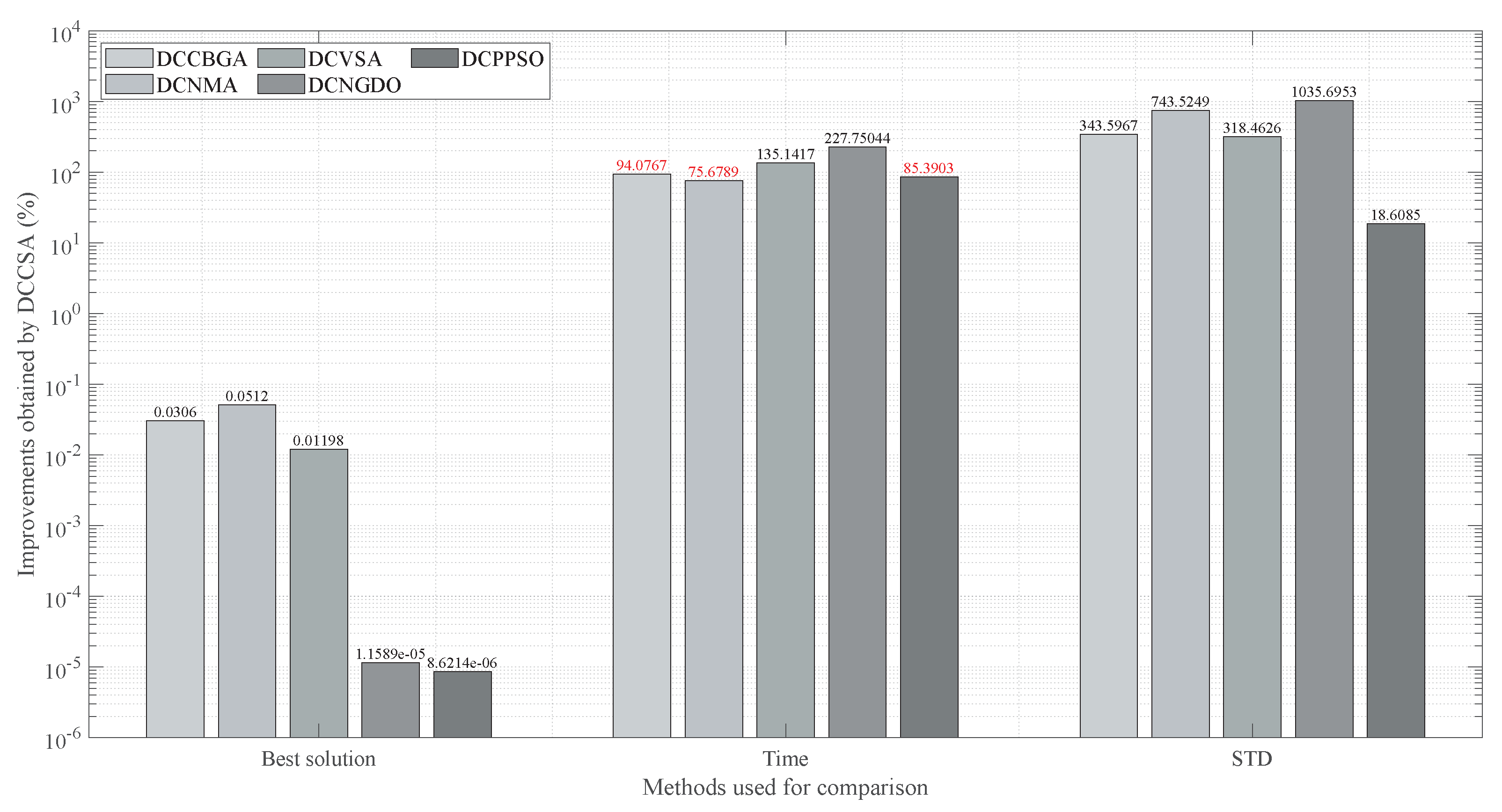
- After 100 consecutive evaluations, the proposed DCCSA showed the lowest standard deviation values in both test systems, with improvements of 559.0663% and 18.6085% with respect to the DCPPSO (the second method with the best results) in the 33- and 69-node test systems, respectively. These results confirm the repeatability and robustness of the DCCSA in solving the problem under study, which makes the methodology used in this study the best option (i.e., over the other methodologies used in this topic) to solve the problem regarding the location and sizing of PV generation units. Moreover, this guarantees that in each evaluation, the solutions will be close to 80 USD/year and 637 USD/year for the 33- and 69-node test systems, respectively.
- ✓
- The processing times required by the proposed technique to find an optimal and feasible solution was 76.9990 s in the 33-node test system and 377.4915 s in the 69-node test system. These are good values, considering that at each iteration, the DCCSA evaluated 1848 power flows more than the other methods. Additionally, processing times are not critical in power system planning because the quality of the solution provided by the methodology is what really matters.
- ✓
- Due to the nonlinearities and nonconvexities of the mathematical model used to express the problem of optimally locating and sizing PV generation units in electrical systems, the complexity of the problem rises as the number of nodes increases. As a result, the BONMIN solver of the GAMS was unable to find an optimal solution in the 69-node test system. The proposed DCCSA, on the contrary, was found to be independent of the number of nodes in the electrical system because it produced the best results in terms of reductions in the total annual operating costs and standard deviation, even as the complexity of the problem increased. This allows concluding that the proposed DCCSA is the best option to solve the problem under analysis. Yet, as the number of system nodes increases, so does the size of the solution space, which implies that the time required to find an optimal solution will increase as well.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Acronyms
| PV | Photovoltaic |
| MINLP | Mixed-Integer Nonlinear Programming |
| GAMS | General Algebraic Modeling System |
| DCCBGA | Discrete–Continuous Chu and Beasley Genetic Algorithm |
| DCNMA | Discrete–Continuous Newton Metaheuristic Algorithm |
| DCVSA | Discrete–Continuous Vortex Search Algorithm |
| DCGNDO | Discrete–Continuous Generalized Normal Distribution Optimizer |
| DCPPSO | Discrete–Continuous Parallel Particle Swarm Optimization |
References
- Saeed, M.H.; Fangzong, W.; Kalwar, B.A.; Iqbal, S. A Review on Microgrids’ Challenges & Perspectives. IEEE Access 2021, 9, 166502–166517. [Google Scholar]
- Pimm, A.J.; Palczewski, J.; Barbour, E.R.; Cockerill, T.T. Using electricity storage to reduce greenhouse gas emissions. Appl. Energy 2021, 282, 116199. [Google Scholar] [CrossRef]
- González, D.M.L.; Rendon, J.G. Opportunities and challenges of mainstreaming distributed energy resources towards the transition to more efficient and resilient energy markets. Renew. Sustain. Energy Rev. 2022, 157, 112018. [Google Scholar] [CrossRef]
- Valencia, A.; Hincapie, R.A.; Gallego, R.A. Optimal location, selection, and operation of battery energy storage systems and renewable distributed generation in medium–low voltage distribution networks. J. Energy Storage 2021, 34, 102158. [Google Scholar] [CrossRef]
- IPSE. Boletín Datos IPSE Mayo 2022; IPSE: Bogotá, Colombia, 2021. [Google Scholar]
- López, A.R.; Krumm, A.; Schattenhofer, L.; Burandt, T.; Montoya, F.C.; Oberländer, N.; Oei, P.Y. Solar PV generation in Colombia-A qualitative and quantitative approach to analyze the potential of solar energy market. Renew. Energy 2020, 148, 1266–1279. [Google Scholar] [CrossRef]
- Eltawil, M.A.; Zhao, Z. Grid-connected photovoltaic power systems: Technical and potential problems—A review. Renew. Sustain. Energy Rev. 2010, 14, 112–129. [Google Scholar] [CrossRef]
- Cabrera, J.B.; Veiga, M.F.; Morales, D.X.; Medina, R. Reducing power losses in smart grids with cooperative game theory. In Advanced Communication and Control Methods for Future Smartgrids; Intechopen: London, UK, 2019; p. 49. [Google Scholar]
- Almadhor, A.; Rauf, H.T.; Khan, M.A.; Kadry, S.; Nam, Y. A hybrid algorithm (BAPSO) for capacity configuration optimization in a distributed solar PV based microgrid. Energy Rep. 2021, 7, 7906–7912. [Google Scholar] [CrossRef]
- Ngamprasert, P.; Rugthaicharoencheep, N.; Woothipatanapan, S. Application Improvement of Voltage Profile by Photovoltaic Farm on Distribution System. In Proceedings of the 2019 IEEE International Conference on Power, Energy and Innovations (ICPEI), Pattaya, Thailand, 16–18 October 2019; pp. 98–101. [Google Scholar]
- Al Abri, R.; El-Saadany, E.F.; Atwa, Y.M. Optimal placement and sizing method to improve the voltage stability margin in a distribution system using distributed generation. IEEE Trans. Power Syst. 2012, 28, 326–334. [Google Scholar] [CrossRef]
- Cortés-Caicedo, B.; Molina-Martin, F.; Grisales-Noreña, L.F.; Montoya, O.D.; Hernández, J.C. Optimal Design of PV Systems in Electrical Distribution Networks by Minimizing the Annual Equivalent Operative Costs through the Discrete-Continuous Vortex Search Algorithm. Sensors 2022, 22, 851. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Wan, C.; Chen, C.; Cao, E.; Song, Y. Distributed photovoltaic generation in the electricity market: Status, mode and strategy. CSEE J. Power Energy Syst. 2018, 4, 263–272. [Google Scholar] [CrossRef]
- Montoya, O.D.; Grisales-Noreña, L.F.; Perea-Moreno, A.J. Optimal Investments in PV Sources for Grid-Connected Distribution Networks: An Application of the Discrete–Continuous Genetic Algorithm. Sustainability 2021, 13, 13633. [Google Scholar] [CrossRef]
- Montoya, O.D.; Grisales-Noreña, L.F.; Alvarado-Barrios, L.; Arias-Londoño, A.; Álvarez-Arroyo, C. Efficient reduction in the annual investment costs in AC distribution networks via optimal integration of solar PV sources using the newton metaheuristic algorithm. Appl. Sci. 2021, 11, 11525. [Google Scholar] [CrossRef]
- Montoya, O.D.; Grisales-Noreña, L.F.; Ramos-Paja, C.A. Optimal Allocation and Sizing of PV Generation Units in Distribution Networks via the Generalized Normal Distribution Optimization Approach. Computers 2022, 11, 53. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.F.; Montoya, O.D.; Hernández, J.C.; Ramos-Paja, C.A.; Perea-Moreno, A.J. A Discrete-Continuous PSO for the Optimal Integration of D-STATCOMs into Electrical Distribution Systems by Considering Annual Power Loss and Investment Costs. Mathematics 2022, 10, 2453. [Google Scholar] [CrossRef]
- Duong, M.Q.; Pham, T.D.; Nguyen, T.T.; Doan, A.T.; Tran, H.V. Determination of optimal location and sizing of solar photovoltaic distribution generation units in radial distribution systems. Energies 2019, 12, 174. [Google Scholar] [CrossRef] [Green Version]
- Khoso, A.H.; Shaikh, M.M.; Hashmani, A.A. A New and Efficient Nonlinear Solver for Load Flow Problems. Eng. Technol. Appl. Sci. Res. 2020, 10, 5851–5856. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, K. Accelerated Computation and Tracking of AC Optimal Power Flow Solutions using GPUs. arXiv 2021, arXiv:2110.06879. [Google Scholar]
- Mahmoud, M.S.; Fouad, M. Control and Optimization of Distributed Generation Systems; Springer: New York, NY, USA, 2015. [Google Scholar]
- Devikanniga, D.; Vetrivel, K.; Badrinath, N. Review of meta-heuristic optimization based artificial neural networks and its applications. Proc. J. Phys. Conf. Ser. 2019, 1362, 012074. [Google Scholar] [CrossRef]
- Askarzadeh, A. A novel metaheuristic method for solving constrained engineering optimization problems: Crow search algorithm. Comput. Struct. 2016, 169, 1–12. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W. On the numerical analysis based on successive approximations for power flow problems in AC distribution systems. Electr. Power Syst. Res. 2020, 187, 106454. [Google Scholar] [CrossRef]
- Jain, M.; Rani, A.; Singh, V. An improved crow search algorithm for high-dimensional problems. J. Intell. Fuzzy Syst. 2017, 33, 3597–3614. [Google Scholar] [CrossRef]
- Hussien, A.G.; Amin, M.; Wang, M.; Liang, G.; Alsanad, A.; Gumaei, A.; Chen, H. Crow Search Algorithm: Theory, Recent Advances, and Applications. IEEE Access 2020, 8, 173548–173565. [Google Scholar] [CrossRef]
- Sahoo, R.R.; Ray, M. PSO based test case generation for critical path using improved combined fitness function. J. King Saud Univ.-Comput. Inf. Sci. 2020, 32, 479–490. [Google Scholar] [CrossRef]
- Zhang, X.; Beram, S.M.; Haq, M.A.; Wawale, S.G.; Buttar, A.M. Research on algorithms for control design of human–machine interface system using ML. Int. J. Syst. Assur. Eng. Manag. 2021, 13, 462–469. [Google Scholar] [CrossRef]
- Harman, M.; Jia, Y.; Zhang, Y. Achievements, open problems and challenges for search based software testing. In Proceedings of the 2015 IEEE 8th International Conference on Software Testing, Verification and Validation (ICST), Graz, Austria, 13–17 April 2015; pp. 1–12. [Google Scholar]
- Kaur, S.; Kumbhar, G.; Sharma, J. A MINLP technique for optimal placement of multiple DG units in distribution systems. Int. J. Electr. Power Energy Syst. 2014, 63, 609–617. [Google Scholar] [CrossRef]
- Sahoo, N.; Prasad, K. A fuzzy genetic approach for network reconfiguration to enhance voltage stability in radial distribution systems. Energy Convers. Manag. 2006, 47, 3288–3306. [Google Scholar] [CrossRef]
- Castiblanco-Pérez, C.M.; Toro-Rodríguez, D.E.; Montoya, O.D.; Giral-Ramírez, D.A. Optimal Placement and Sizing of D-STATCOM in Radial and Meshed Distribution Networks Using a Discrete-Continuous Version of the Genetic Algorithm. Electronics 2021, 10, 1452. [Google Scholar] [CrossRef]
- Wang, P.; Wang, W.; Xu, D. Optimal sizing of distributed generations in DC microgrids with comprehensive consideration of system operation modes and operation targets. IEEE Access 2018, 6, 31129–31140. [Google Scholar] [CrossRef]
- Beasley, J.E.; Chu, P.C. A genetic algorithm for the set covering problem. Eur. J. Oper. Res. 1996, 94, 392–404. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| 0.1390 | USD/kWh | T | 365 | days | |
| 10 | % | 20 | years | ||
| 1 | h | 2 | % | ||
| 1036.49 | USD/kWp | 0.0019 | USD/kWh | ||
| 3 | - | % | |||
| 0 | kW | 2400 | kW | ||
| USD/V | USD/V | ||||
| USD/W | - | - | - |
| Parameter | DCCSA |
|---|---|
| Number of individuals () | 87 |
| Maximum iterations () | 816 |
| Flight length () | 2.8741 |
| Awareness probability () | 0.0046 |
| Method | Location (Node)/Power (MW) | (USD/Year) | Reduction (%) | Time (s) | STD (%) |
|---|---|---|---|---|---|
| Base case | - | 3,700,455.38 | 0 | - | - |
| - | |||||
| - | |||||
| BONMIN | 17/1.3539 | 2,701,824.14 | 26.9867 | 3.64 | 0 |
| 18/0.2105 | |||||
| 33/2.1452 | |||||
| DCNMA | 8/2.0961 | 2,700,227.33 | 27.0298 | 20.21 | 0.0812 |
| 16/1.2688 | |||||
| 30/0.2770 | |||||
| DCCBGA | 11/0.7605 | 2,699,932.29 | 27.0378 | 5.30 | 0.0452 |
| 15/0.9690 | |||||
| 30/1.9060 | |||||
| DCVSA | 11/0.7606 | 2,699,761.71 | 27.0424 | 170.23 | 0.0427 |
| 14/1.0852 | |||||
| 31/1.8030 | |||||
| DCGNDO | 10/1.0083 | 2,699,671.76 | 27.0436 | 268.69 | 0.0700 |
| 16/0.9137 | |||||
| 31/1.7257 | |||||
| DCPPSO | 10/1.0092 | 2,699,671.76 | 27.0436 | 8.32 | 0.0246 |
| 16/0.9137 | |||||
| 31/1.7245 | |||||
| DCCSA | 10/1.0093 | 2,699,671.76 | 27.0449 | 77.00 | 0.0037 |
| 16/0.9138 | |||||
| 31/1.7246 |
| Method | Location (Node)/Power (MW) | (USD/Year) | Reduction (%) | Time (s) | STD (%) |
|---|---|---|---|---|---|
| Base case | - | 3,878,199.93 | 0 | - | - |
| - | |||||
| - | |||||
| DCNMA | 12/0.0794 | 2,826,368.60 | 27.1216 | 91.81 | 0.1900 |
| 60/1.3805 | |||||
| 61/2.3776 | |||||
| DCCBGA | 24/0.5326 | 2,825,783.33 | 27.1397 | 22.36 | 0.0999 |
| 61/1.8954 | |||||
| 64/1.3772 | |||||
| DCVSA | 16/0.2632 | 2,825,264.56 | 27.1502 | 887.64 | 0.0942 |
| 61/2.2719 | |||||
| 63/2.2934 | |||||
| DCGNDO | 21/0.4812 | 2,824,923.38 | 27.1589 | 1237.23 | 0.2558 |
| 61/2.4 | |||||
| 64/0.9259 | |||||
| DCPPSO | 21/0.4890 | 2,824,923.29 | 27.1589 | 55.15 | 0.0267 |
| 61/2.4 | |||||
| 64/0.9169 | |||||
| DCCSA | 21/0.4816 | 2,824,923.05 | 27.1589 | 377.49 | 0.0225 |
| 61/2.4 | |||||
| 64/0.9254 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cortés-Caicedo, B.; Grisales-Noreña, L.F.; Montoya, O.D.; Perea-Moreno, M.-A.; Perea-Moreno, A.-J. Optimal Location and Sizing of PV Generation Units in Electrical Networks to Reduce the Total Annual Operating Costs: An Application of the Crow Search Algorithm. Mathematics 2022, 10, 3774. https://doi.org/10.3390/math10203774
Cortés-Caicedo B, Grisales-Noreña LF, Montoya OD, Perea-Moreno M-A, Perea-Moreno A-J. Optimal Location and Sizing of PV Generation Units in Electrical Networks to Reduce the Total Annual Operating Costs: An Application of the Crow Search Algorithm. Mathematics. 2022; 10(20):3774. https://doi.org/10.3390/math10203774
Chicago/Turabian StyleCortés-Caicedo, Brandon, Luis Fernando Grisales-Noreña, Oscar Danilo Montoya, Miguel-Angel Perea-Moreno, and Alberto-Jesus Perea-Moreno. 2022. "Optimal Location and Sizing of PV Generation Units in Electrical Networks to Reduce the Total Annual Operating Costs: An Application of the Crow Search Algorithm" Mathematics 10, no. 20: 3774. https://doi.org/10.3390/math10203774