

Robust Flatness-Based Tracking Control for a “Full-Bridge Buck Inverter–DC Motor” System
 , , , , , , , and
, , , , , , , and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
1.1. Unidirectional “DC/DC Buck Converter–DC Motor” System
1.2. Bidirectional “DC/DC Buck Converter–DC Motor” Systems
1.3. Other “DC/DC Power Converters–DC Motor” Systems
1.4. Discussion of Related Work, Motivation, and Contribution
2. “Full-Bridge Buck Inverter–DC Motor” System
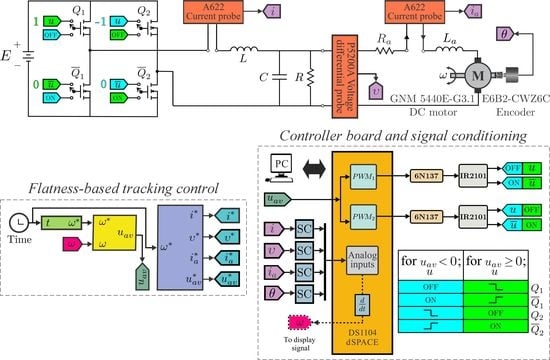
- The subsystem full-bridge Buck inverter, which modulates and feeds with bipolar voltage the DC motor through the input u. It is composed of a power supply E and an array of four transistors, denoted as , , , and , which operate in accordance with the clock cycles shown in Figure 2. This subsystem is made up of an filter, where i is the circulating current over the inductor L, and is the voltage appearing across the terminals of the parallel connection between the capacitor C and the load R.
- The subsystem DC motor, which relates to the actuator system and comprises the armature resistance , armature inductance , and armature current . corresponds to the angular velocity associated with the motor shaft. Additional parameters are the moment of inertia of the rotor and motor load J, the viscous friction coefficient of the motor b, the counterelectromotive force constant , and the motor torque constant .
3. Robust Flatness-Based Tracking Control
4. Description of the Built Experimental Platform
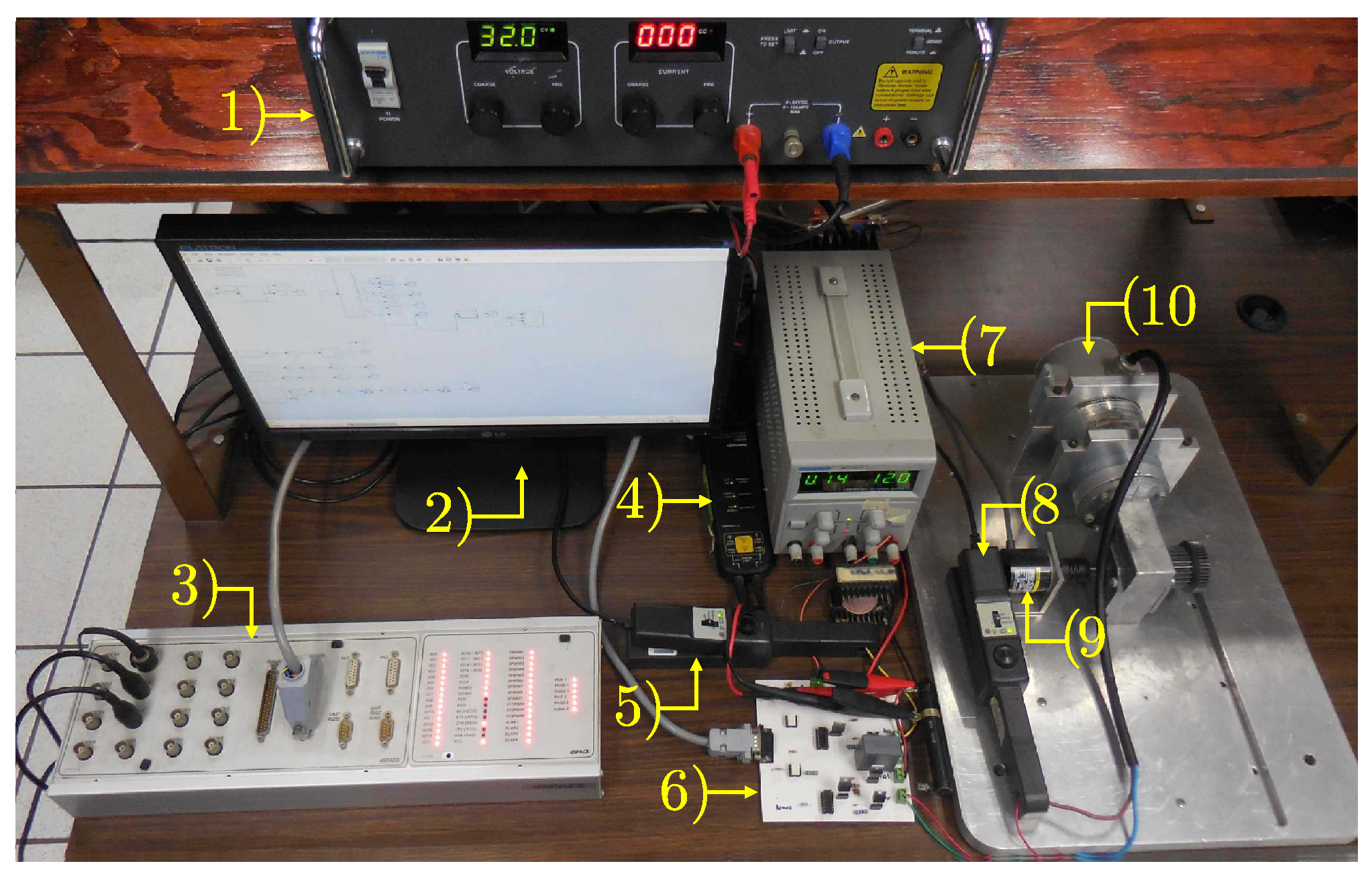
- System. This block corresponds to the built full-bridge Buck inverter–DC motor system. Here, the variables i, , , and were measured via a Tektronix A622 current probe, a Tektronix P5200A voltage probe, a Tektronix A622 current probe, and an Omron E6B2-CWZ6C encoder, respectively. On the other hand, the values of the parameters associated with the Buck converter and the Engel GNM 5440E-G3.1 DC motor wereandrespectively.
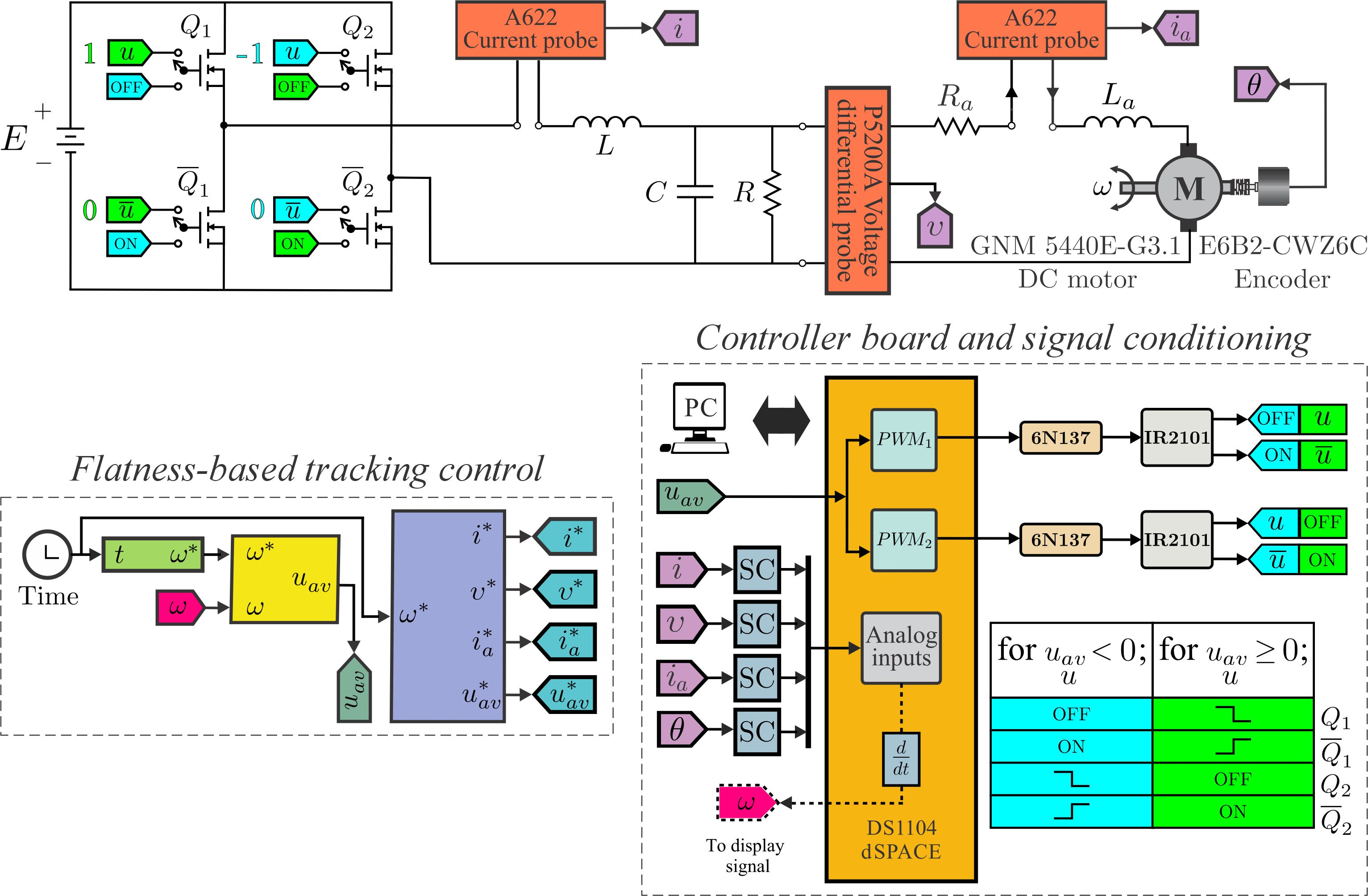
- Flatness-based tracking control. The flatness-based control (3) was implemented in this block with Simulink. On the one hand, the determination of the angular velocity , required by the control, was carried out via an E6B2-CWZ6C encoder. On the other hand, the desired angular velocity profile , also required by the control, was produced from the desired trajectory subblock. Meanwhile, the control gains were obtained after the parameters , and were introduced in (5). Lastly, the reference variables , , , and were generated when was replaced into (8)–(10), and (11), respectively.
- Controller board and signal conditioning. In this block, the implementation of the switched control, u, corresponding to the obtained flatness-based tracking control (3), was carried out via the PWM subblocks of the dSPACE DS1104 controller board. Thus, after obtaining u, the correct on/off activation of the transistors , , , and of the full-bridge inverter circuit was achieved. Such a circuit was built with four IRF640N MOSFET transistors, two IR2101 drivers, and two 6N137 optocouplers. Finally, the signals i, , , and were correctly adjusted through signal conditioning (SC) blocks.
5. Experimental and Simulation Tests in Closed-Loop and Discussion of the Results
5.1. Results of the System in Closed-Loop
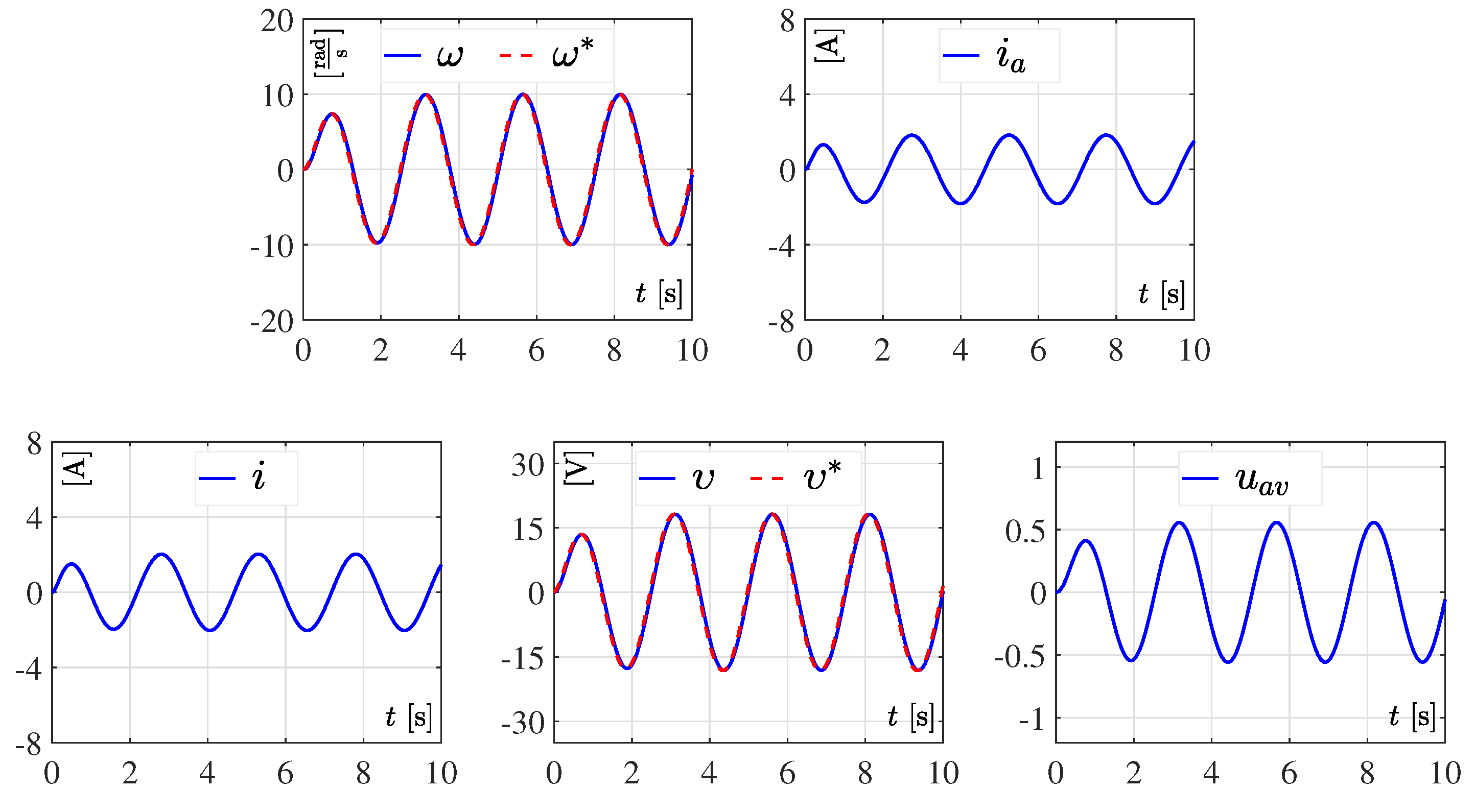
5.1.1. Experimental and Simulation Test 1
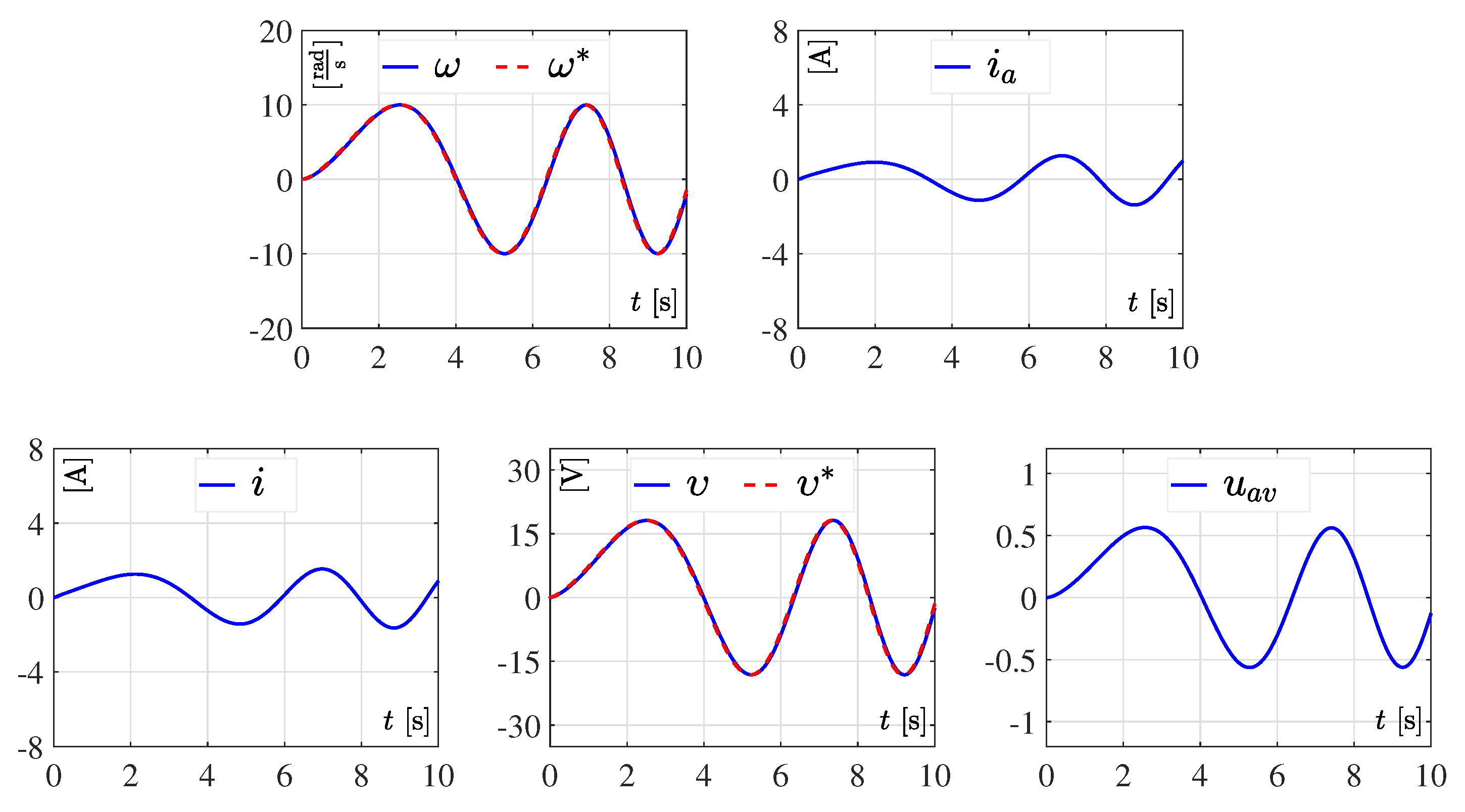
5.1.2. Experimental and Simulation Test 2
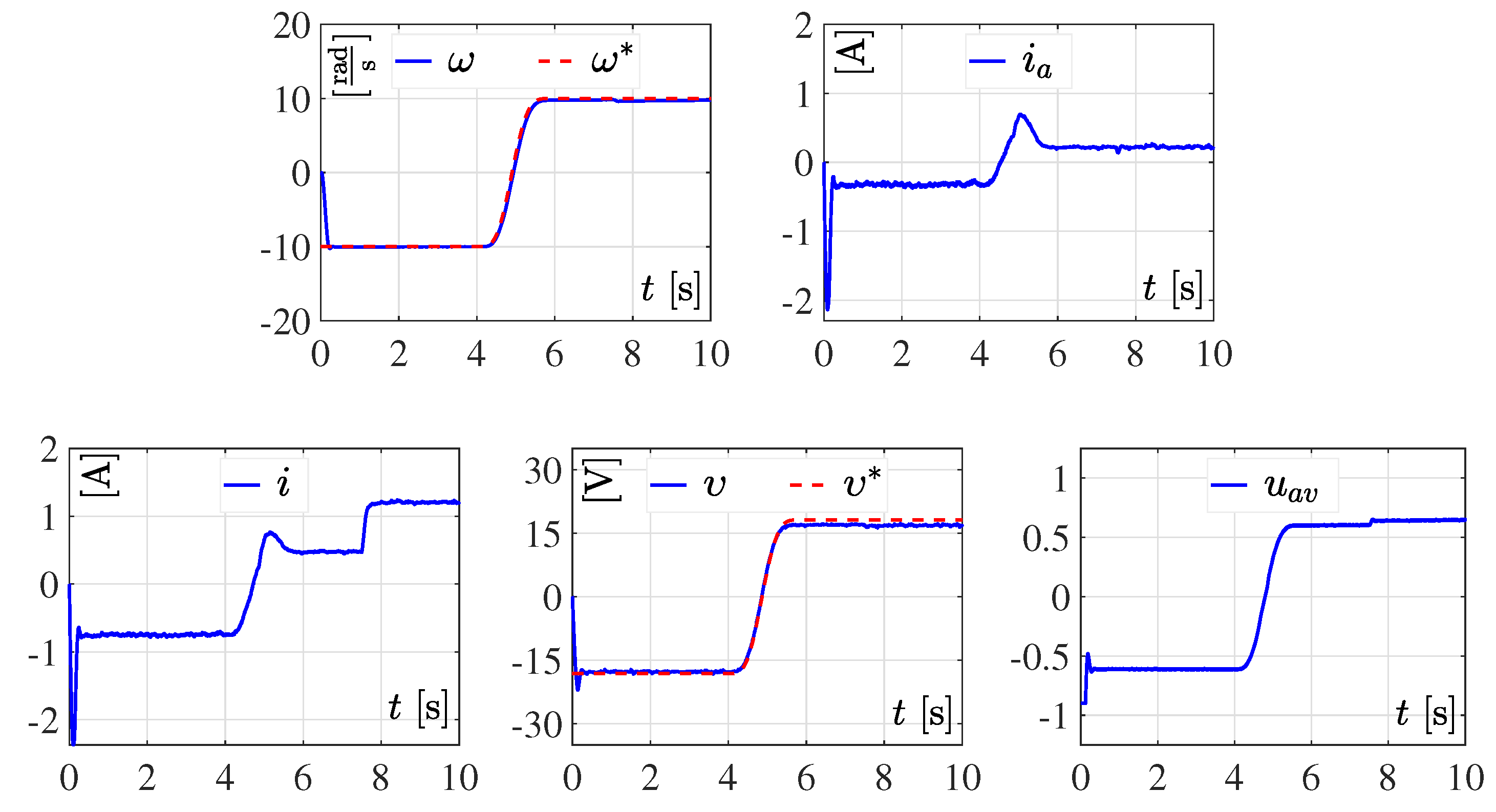
5.1.3. Experimental and Simulation Test 3
5.1.4. Experimental and Simulation Test 4
5.1.5. Experimental and Simulation Test 5
5.2. Discussion of the Experimental and Simulation Results
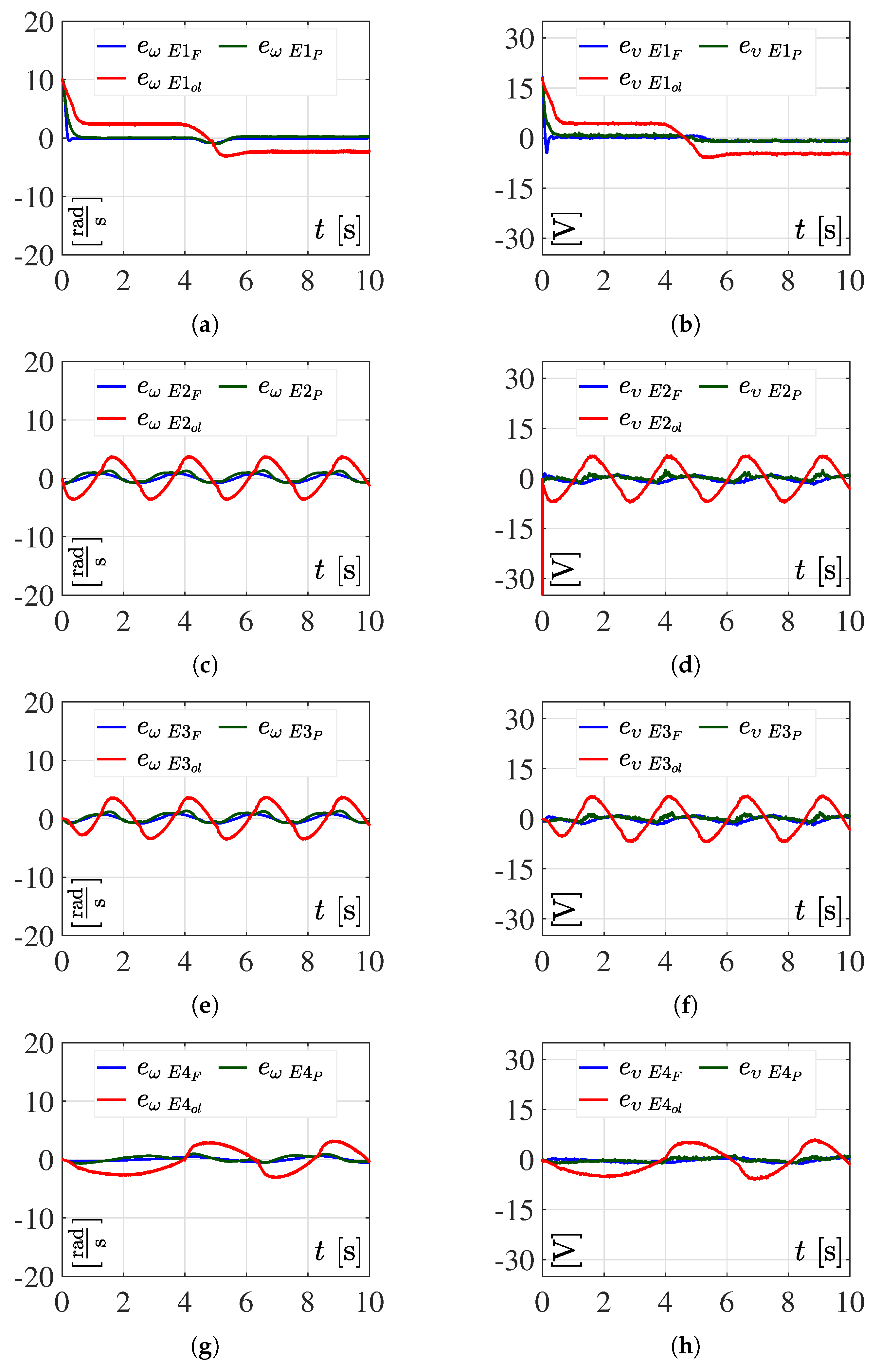
- 1
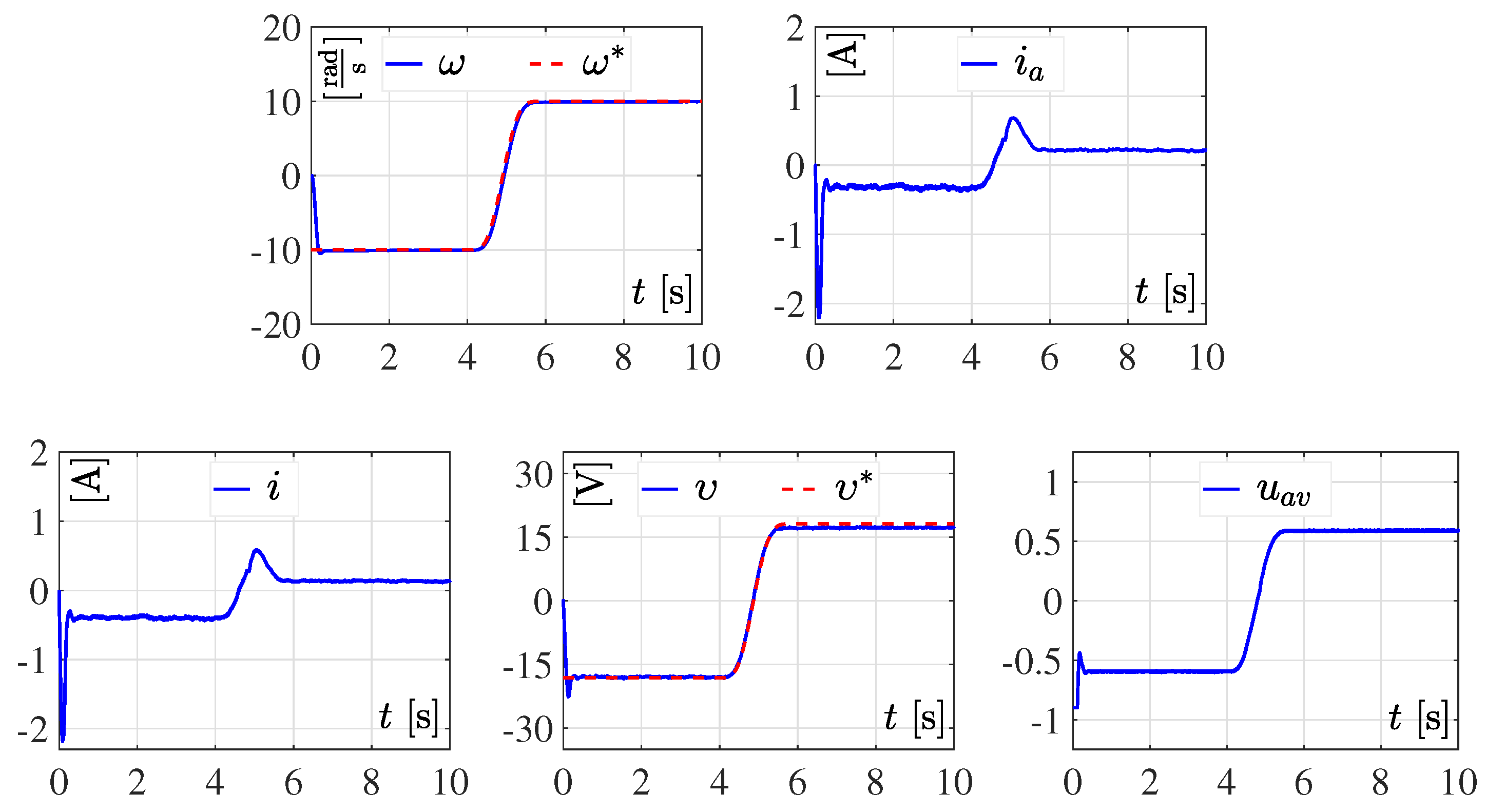
- The associated experimental tests of the system in closed-loop with the flatness-based control (studied in this paper). Here, the closed-loop tracking errors for the angular velocity () and voltage () were determined bywhere subscript , for , associates the experimental test from which the tracking error was obtained. That is, for , , , and , the desired trajectories correspond to (22)–(25), respectively.
- 2
- The experimental dynamic responses of the system in closed-loop with the passive control based on the ETEDPOF strategy, developed in [41]. Here, the closed-loop tracking errors of the angular velocity and voltage denoted by and , respectively, were declared aswhere subscript , for , represents the experimental response from which the tracking error was obtained.
- 3
- The obtained experimental results for the system in open-loop, analyzed in [40]. Here, the open-loop tracking errors of the angular velocity () and voltage () were defined bywhere subscript , for , indicates the experimental result in open-loop from which the tracking error was obtained.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gieras, J.F. Permanent Magnet Motor Technology: Design and Applications, 3rd ed.; CRC Press: New York, NY, USA, 2010. [Google Scholar]
- Lyshevski, S.E. Electromechanical Systems, Electric Machines, and Applied Mechatronics; CRC Press: Boca Raton, FL, USA, 2000; ISBN 0-8493-2275-8. [Google Scholar]
- Ahmad, M.A.; Ismail, R.M.T.R.; Ramli, M.S. Control strategy of Buck converter driven DC motor: A comparative assessment. Austral. J. Basic Appl. Sci. 2010, 4, 4893–4903. [Google Scholar]
- Bingöl, O.; Paçaci, S. A virtual laboratory for neural network controlled DC motors based on a DC-DC Buck converter. Int. J. Eng. Educ. 2012, 28, 713–723. [Google Scholar]
- Sira-Ramírez, H.; Oliver-Salazar, M.A. On the robust control of Buck-converter DC-motor combinations. IEEE Trans. Power Electron. 2013, 28, 3912–3922. [Google Scholar] [CrossRef]
- Yang, J.; Wu, H.; Hu, L.; Li, S. Robust predictive speed regulation of converter-driven DC motors via a discrete-time reduced-order GPIO. IEEE Trans. Ind. Electron. 2019, 66, 7893–7903. [Google Scholar] [CrossRef] [Green Version]
- Stanković, M.R.; Madonski, R.; Shao, S.; Mikluc, D. On dealing with harmonic uncertainties in the class of active disturbance rejection controllers. Int. J. Control 2021, 94, 2795–2810. [Google Scholar] [CrossRef]
- Madonski, R.; Łakomy, K.; Stankovic, M.; Shao, S.; Yang, J.; Li, S. Robust converter-fed motor control based on active rejection of multiple disturbances. Control Eng. Pract. 2021, 107, 104696. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, J.; Li, S. A model-based unmatched disturbance rejection control approach for speed regulation of a converter-driven DC motor using output-feedback. IEEE-CAA J. Autom. Sin. 2022, 9, 365–376. [Google Scholar] [CrossRef]
- Guerrero-Ramírez, E.; Martínez-Barbosa, A.; Guzmán-Ramírez, E.; Barahona-Ávalos, J.L. Design methodology for digital active disturbance rejection control of the DC motor drive. e-Prime—Adv. Electr. Eng. Electron. Energy 2022, 2, 100050. [Google Scholar] [CrossRef]
- Guerrero-Ramírez, E.; Martínez-Barbosa, A.; Contreras-Ordaz, M.A.; Guerrero-Ramírez, G.; Guzman-Ramirez, E.; Barahona-Ávalos, J.L.; Adam-Medina, M. DC motor drive powered by solar photovoltaic energy: An FPGA-based active disturbance rejection control approach. Energies 2022, 15, 6595. [Google Scholar] [CrossRef]
- Rigatos, G.; Siano, P.; Wira, P.; Sayed-Mouchaweh, M. Control of DC–DC converter and DC motor dynamics using differential flatness theory. Intell. Ind. Syst. 2016, 2, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Rigatos, G.; Siano, P.; Ademi, S.; Wira, P. Flatness-based control of DC-DC converters implemented in successive loops. Electr. Power Compon. Syst. 2018, 46, 673–687. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Roldán-Caballero, A.; Hernández-Márquez, E.; García-Sánchez, J.R.; Marciano-Melchor, M.; Hernández-Guzmán, V.M.; Silva-Ortigoza, G. Robust flatness tracking control for the “DC/DC Buck converter-DC motor” system: Renewable energy-based power supply. Complexity 2021, 2021, 2158782. [Google Scholar] [CrossRef]
- Hoyos, F.E.; Rincón, A.; Taborda, J.A.; Toro, N.; Angulo, F. Adaptive quasi-sliding mode control for permanent magnet DC motor. Math. Probl. Eng. 2013, 2013, 693685. [Google Scholar] [CrossRef] [Green Version]
- Hoyos Velasco, F.E.; Candelo-Becerra, J.E.; Rincón Santamaria, A. Dynamic analysis of a permanent magnet DC motor using a Buck converter controlled by ZAD-FPIC. Energies 2018, 11, 3388. [Google Scholar] [CrossRef] [Green Version]
- Hoyos, F.E.; Candelo-Becerra, J.E.; Hoyos Velasco, C.I. Application of zero average dynamics and fixed point induction control techniques to control the speed of a DC motor with a Buck converter. Appl. Sci. 2020, 10, 1807. [Google Scholar] [CrossRef] [Green Version]
- Hoyos, F.E.; Candelo-Becerra, J.E.; Rincón, A. Zero average dynamic controller for speed control of DC motor. Appl. Sci. 2021, 11, 5608. [Google Scholar] [CrossRef]
- Wei, F.; Yang, P.; Li, W. Robust adaptive control of DC motor system fed by Buck converter. Int. J. Control Autom. 2014, 7, 179–190. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Hernández-Guzmán, V.M.; Antonio-Cruz, M.; Muñoz-Carrillo, D. DC/DC Buck power converter as a smooth starter for a DC motor based on a hierarchical control. IEEE Trans. Power Electron. 2015, 30, 1076–1084. [Google Scholar] [CrossRef]
- Hernández-Guzmán, V.M.; Silva-Ortigoza, R.; Muñoz-Carrillo, D. Velocity control of a brushed DC-motor driven by a DC to DC Buck power converter. Int. J. Innov. Comp. Inf. Control 2015, 11, 509–521. [Google Scholar] [CrossRef]
- Rauf, A.; Li, S.; Madonski, R.; Yang, J. Continuous dynamic sliding mode control of converter-fed DC motor system with high order mismatched disturbance compensation. Trans. Inst. Meas. Control 2020, 42, 2812–2821. [Google Scholar] [CrossRef]
- Rauf, A.; Zafran, M.; Khan, A.; Tariq, A.R. Finite-time nonsingular terminal sliding mode control of converter-driven DC motor system subject to unmatched disturbances. Int. Trans. Elect. Energy Syst. 2021, 31, e13070. [Google Scholar] [CrossRef]
- Ravikumar, D.; Srinivasan, G.K. Implementation of higher order sliding mode control of DC–DC Buck converter fed permanent magnet DC motor with improved performance. Automatika 2022. [Google Scholar] [CrossRef]
- Khubalkar, S.; Chopade, A.; Junghare, A.; Aware, M.; Das, S. Design and realization of stand-alone digital fractional order PID controller for Buck converter fed DC motor. Circuits Syst. Signal Process. 2016, 35, 2189–2211. [Google Scholar] [CrossRef]
- Khubalkar, S.W.; Junghare, A.S.; Aware, M.V.; Chopade, A.S.; Das, S. Demonstrative fractional order—PID controller based DC motor drive on digital platform. ISA Trans. 2018, 82, 79–93. [Google Scholar] [CrossRef] [PubMed]
- Patil, M.D.; Vadirajacharya, K.; Khubalkar, S.W. Design and tuning of digital fractional-order PID controller for permanent magnet DC motor. IETE J. Res. 2021. [Google Scholar] [CrossRef]
- Kumar, S.G.; Thilagar, S.H. Sensorless load torque estimation and passivity based control of Buck converter fed DC motor. Sci. World J. 2015, 2015, 132843. [Google Scholar] [CrossRef] [Green Version]
- Srinivasan, G.K.; Srinivasan, H.T.; Rivera, M. Sensitivity Analysis of Exact Tracking Error Dynamics Passive Output Control for a Flat/Partially Flat Converter Systems. Electronics 2020, 9, 1942. [Google Scholar] [CrossRef]
- Nizami, T.K.; Chakravarty, A.; Mahanta, C. Design and implementation of a neuro-adaptive backstepping controller for Buck converter fed PMDC-motor. Control Eng. Pract. 2017, 58, 78–87. [Google Scholar] [CrossRef]
- Nizami, T.K.; Chakravarty, A.; Mahanta, C.; Iqbal, A.; Hosseinpour, A. Enhanced dynamic performance in DC–DC converter-PMDC motor combination through an intelligent non-linear adaptive control scheme. IET Power Electron. 2022. [Google Scholar] [CrossRef]
- Nizami, T.K.; Gangula, S.D.; Reddy, R.; Dhiman, H.S. Legendre neural network based intelligent control of DC-DC step down converter-PMDC motor combination. IFAC 2022, 55, 162–167. [Google Scholar] [CrossRef]
- Hanif, M.I.F.M.; Suid, M.H.; Ahmad, M.A. A piecewise affine PI controller for Buck converter generated DC motor. Int. J. Power Electron. Drive Syst. 2019, 10, 1419–1426. [Google Scholar] [CrossRef]
- Rigatos, G.; Siano, P.; Sayed-Mouchaweh, M. Adaptive neurofuzzy H-infinity control of DC-DC voltage converters. Neural Comput. Appl. 2020, 33, 2507–2520. [Google Scholar] [CrossRef]
- Kazemi, M.G.; Montazeri, M. Fault detection of continuous time linear switched systems using combination of bond graph method and switching observer. ISA Trans. 2019, 94, 338–351. [Google Scholar] [CrossRef] [PubMed]
- Silva-Ortigoza, R.; Alba-Juárez, J.N.; García-Sánchez, J.R.; Antonio-Cruz, M.; Hernández-Guzmán, V.M.; Taud, H. Modeling and experimental validation of a bidirectional DC/DC Buck power electronic converter–DC motor system. IEEE Latin Am. Trans. 2017, 15, 1043–1051. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Alba-Juárez, J.N.; García-Sánchez, J.R.; Hernández-Guzmán, V.M.; Sosa-Cervantes, C.Y.; Taud, H. A sensorless passivity-based control for the DC/DC Buck converter–Inverter–DC motor system. IEEE Latin Am. Trans. 2016, 14, 4227–4234. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Antonio-Cruz, M.; Hernández-Guzmán, V.M.; Taud, H.; Marcelino-Aranda, M. Bidirectional tracking robust controls for a DC/DC Buck converter-DC motor system. Complexity 2018, 2018, 1260743. [Google Scholar] [CrossRef]
- Chi, X.; Quan, S.; Chen, J.; Wang, Y.-X.; He, H. Proton exchange membrane fuel cell-powered bidirectional DC motor control based on adaptive sliding-mode technique with neural network estimation. Int. J. Hydrog. Energy 2020, 45, 20282–20292. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; Avila-Rea, C.A.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Marciano-Melchor, M.; Marcelino-Aranda, M.; Roldán-Caballero, A.; Márquez-Sánchez, C. New “full-bridge Buck inverter—DC motor” system: Steady-state and dynamic analysis and experimental validation. Electronics 2019, 8, 1216. [Google Scholar] [CrossRef] [Green Version]
- Silva-Ortigoza, R.; Hernandez-Marquez, E.; Roldan-Caballero, A.; Tavera-Mosqueda, S.; Marciano-Melchor, M.; Garcia-Sanchez, J.R.; Hernandez-Guzman, V.M.; Silvia-Ortigoza, R. Sensorless tracking control for a “full-bridge Buck inverter—DC motor” system: Passivity and flatness-based design. IEEE Access 2021, 9, 132191–132204. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Reger, J.; Sira-Ramírez, H. Load torque estimation and passivity-based control of a Boost-converter/DC-motor combination. IEEE Trans. Control Syst. Technol. 2010, 18, 1398–1405. [Google Scholar] [CrossRef]
- Alexandridis, A.T.; Konstantopoulos, G.C. Modified PI speed controllers for series-excited DC motors fed by DC/DC Boost converters. Control Eng. Pract. 2014, 23, 14–21. [Google Scholar] [CrossRef]
- Malek, S. A new nonlinear controller for DC-DC Boost converter fed DC motor. Int. J. Power Electron. 2015, 7, 54–71. [Google Scholar] [CrossRef]
- Konstantopoulos, G.C.; Alexandridis, A.T. Enhanced control design of simple DC-DC Boost converter-driven DC motors: Analysis and implementation. Electr. Power Compon. Syst. 2015, 43, 1946–1957. [Google Scholar] [CrossRef]
- Mishra, P.; Banerjee, A.; Ghosh, M.; Baladhandautham, C.B. Digital pulse width modulation sampling effect embodied steady-state time-domain modeling of a Boost converter driven permanent magnet DC brushed motor. Int. Trans. Elect. Energy Syst. 2021, 31, e12970. [Google Scholar] [CrossRef]
- Govindharaj, A.; Mariappan, A. Design and analysis of novel Chebyshev neural adaptive backstepping controller for Boost converter fed PMDC motor. Int. J. Autom. Control 2020, 14, 694–712. [Google Scholar] [CrossRef]
- Alajmi, B.; Ahmed, N.A.; Al-Othman, A.K. Small-signal analysis and hardware implementation of Boost converter fed PMDC motor for electric vehicle applications. J. Eng. Res. 2021, 9, 189–208. [Google Scholar] [CrossRef]
- Manikandan, C.T.; Sundarrajan, G.T.; Krishnan, V.G.; Ofori, I. Performance analysis of two-loop interleaved Boost converter fed PMDC-motor system using FLC. Math. Probl. Eng. 2022, 2022, 1639262. [Google Scholar] [CrossRef]
- García-Sánchez, J.R.; Hernández-Márquez, E.; Ramírez-Morales, J.; Marciano-Melchor, M.; Marcelino-Aranda, M.; Taud, H.; Silva-Ortigoza, R. A robust differential flatness-based tracking control for the “MIMO DC/DC Boost converter—Inverter—DC motor” system: Experimental results. IEEE Access 2019, 7, 84497–84505. [Google Scholar] [CrossRef]
- Egidio, L.N.; Deacto, G.S.; Jungers, R.M. Stabilization of rank-deficient continuous-time switched affine systems. Automatica 2022, 143, 110426. [Google Scholar] [CrossRef]
- Sönmez, Y.; Dursun, M.; Güvenç, U.; Yilmaz, C. Start up current control of Buck-Boost convertor-fed serial DC motor. Pamukkale Univ. J. Eng. Sci. 2009, 15, 278–283. [Google Scholar]
- Linares-Flores, J.; Barahona-Avalos, J.L.; Sira-Ramírez, H.; Contreras-Ordaz, M.A. Robust passivity-based control of a Buck–Boost-converter/DC-motor system: An active disturbance rejection approach. IEEE Trans. Ind. Appl. 2012, 48, 2362–2371. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; Avila-Rea, C.A.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Silva-Ortigoza, G.; Taud, H.; Marcelino-Aranda, M. Robust tracking controller for a DC/DC Buck-Boost converter–Inverter–DC motor system. Energies 2018, 11, 2500. [Google Scholar] [CrossRef] [Green Version]
- Ghazali, M.R.; Ahmad, M.A.; Ismail, R.M.T.R. Adaptive safe experimentation dynamics for data-driven neuroendocrine-PID control of MIMO systems. IETE J. Res. 2022, 68, 1611–1624. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Sira-Ramírez, H.; Cuevas-López, E.F.; Contreras-Ordaz, M.A. Sensorless passivity based control of a DC motor via a solar powered Sepic converter-full bridge combination. J. Power Electron. 2011, 11, 743–750. [Google Scholar] [CrossRef] [Green Version]
- Srinivasan, G.K.; Srinivasan, H.T.; Rivera, M. Low-cost implementation of passivity-based control and estimation of load torque for a Luo converter with dynamic load. Electronics 2020, 9, 1914. [Google Scholar] [CrossRef]
- Arshad, M.H.; Abido, M.A. Hierarchical control of DC motor coupled with Cuk converter combining differential flatness and sliding mode control. Arab. J. Sci. Eng. 2021, 46, 9413–9422. [Google Scholar] [CrossRef]
- Ismail, A.A.A.; Elnady, A. Advanced drive system for DC motor using multilevel DC/DC Buck converter circuit. IEEE Access 2019, 7, 54167–54178. [Google Scholar] [CrossRef]
- Guerrero, E.; Guzmán, E.; Linares, J.; Martínez, A.; Guerrero, G. FPGA-based active disturbance rejection velocity control for a parallel DC/DC Buck converter-DC motor system. IET Power Electron. 2020, 13, 356–367. [Google Scholar] [CrossRef]
- Erenturk, K. Hybrid control of a mechatronic system: Fuzzy logic and grey system modeling approach. IEEE/ASME Trans. Mechatron 2007, 12, 703–710. [Google Scholar] [CrossRef]
- Swathi, K.V.R.; Nagesh-Kumar, G.V. Design of intelligent controller for reduction of chattering phenomenon in robotic arm: A rapid prototyping. Comput. Electr. Eng. 2019, 74, 483–497. [Google Scholar] [CrossRef]
- García-Sánchez, J.R.; Tavera-Mosqueda, S.; Silva-Ortigoza, R.; Hernández-Guzmán, V.M.; Marciano-Melchor, M.; Rubio, J.J.; Ponce-Silva, M.; Hernández-Bolaños, M.; Martínez-Martínez, J. A novel dynamic three-level tracking controller for mobile robots considering actuators and power stage subsystems: Experimental assessment. Sensors 2020, 20, 4959. [Google Scholar] [CrossRef] [PubMed]
- Hernández-Guzmán, V.M.; Silva-Ortigoza, R.; Tavera-Mosqueda, S.; Marcelino-Aranda, M.; Marciano-Melchor, M. Path-tracking of a WMR fed by inverter-DC/DC Buck power electronic converter systems. Sensors 2020, 20, 6522. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Yang, J.; Li, S.; Yu, X.; Wang, Z. Continuous output feedback TSM control for uncertain systems with a DC-AC inverter example. IEEE Trans. Circuit Syst. II Express Briefs 2018, 65, 71–75. [Google Scholar] [CrossRef]
- Chang, E.-C.; Cheng, C.-A.; Wu, R.-C. Robust optimal tracking control of a full-bridge DC-AC converter. Appl. Sci. 2021, 11, 1211. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silva-Ortigoza, R.; Marciano-Melchor, M.; García-Chávez, R.E.; Roldán-Caballero, A.; Hernández-Guzmán, V.M.; Hernández-Márquez, E.; García-Sánchez, J.R.; García-Cortés, R.; Silva-Ortigoza, G. Robust Flatness-Based Tracking Control for a “Full-Bridge Buck Inverter–DC Motor” System. Mathematics 2022, 10, 4110. https://doi.org/10.3390/math10214110
Silva-Ortigoza R, Marciano-Melchor M, García-Chávez RE, Roldán-Caballero A, Hernández-Guzmán VM, Hernández-Márquez E, García-Sánchez JR, García-Cortés R, Silva-Ortigoza G. Robust Flatness-Based Tracking Control for a “Full-Bridge Buck Inverter–DC Motor” System. Mathematics. 2022; 10(21):4110. https://doi.org/10.3390/math10214110
Chicago/Turabian StyleSilva-Ortigoza, Ramón, Magdalena Marciano-Melchor, Rogelio Ernesto García-Chávez, Alfredo Roldán-Caballero, Victor Manuel Hernández-Guzmán, Eduardo Hernández-Márquez, José Rafael García-Sánchez, Rocío García-Cortés, and Gilberto Silva-Ortigoza. 2022. "Robust Flatness-Based Tracking Control for a “Full-Bridge Buck Inverter–DC Motor” System" Mathematics 10, no. 21: 4110. https://doi.org/10.3390/math10214110