
Global Prescribed-Time Stabilization of High-Order Nonlinear Systems with Asymmetric Actuator Dead-Zone


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (i)
- (ii)
- To effectively overcome the computationally singular problem of the conventional scaling function-based design in [30], a novel switched scaling function with the switching rule involving both state and time is introduced.
- (iii)
- Under some weaker restricted conditions on characterizing system nonlinearities, a systematic design method is proposed by delicately utilizing the API technique to ensure the achievement of the performance requirements.
2. Problem Formulation and Preliminaries
2.1. Problem Formulation
2.2. Preliminaries
3. Main Results
3.1. Scaling Function
3.2. Controller Design
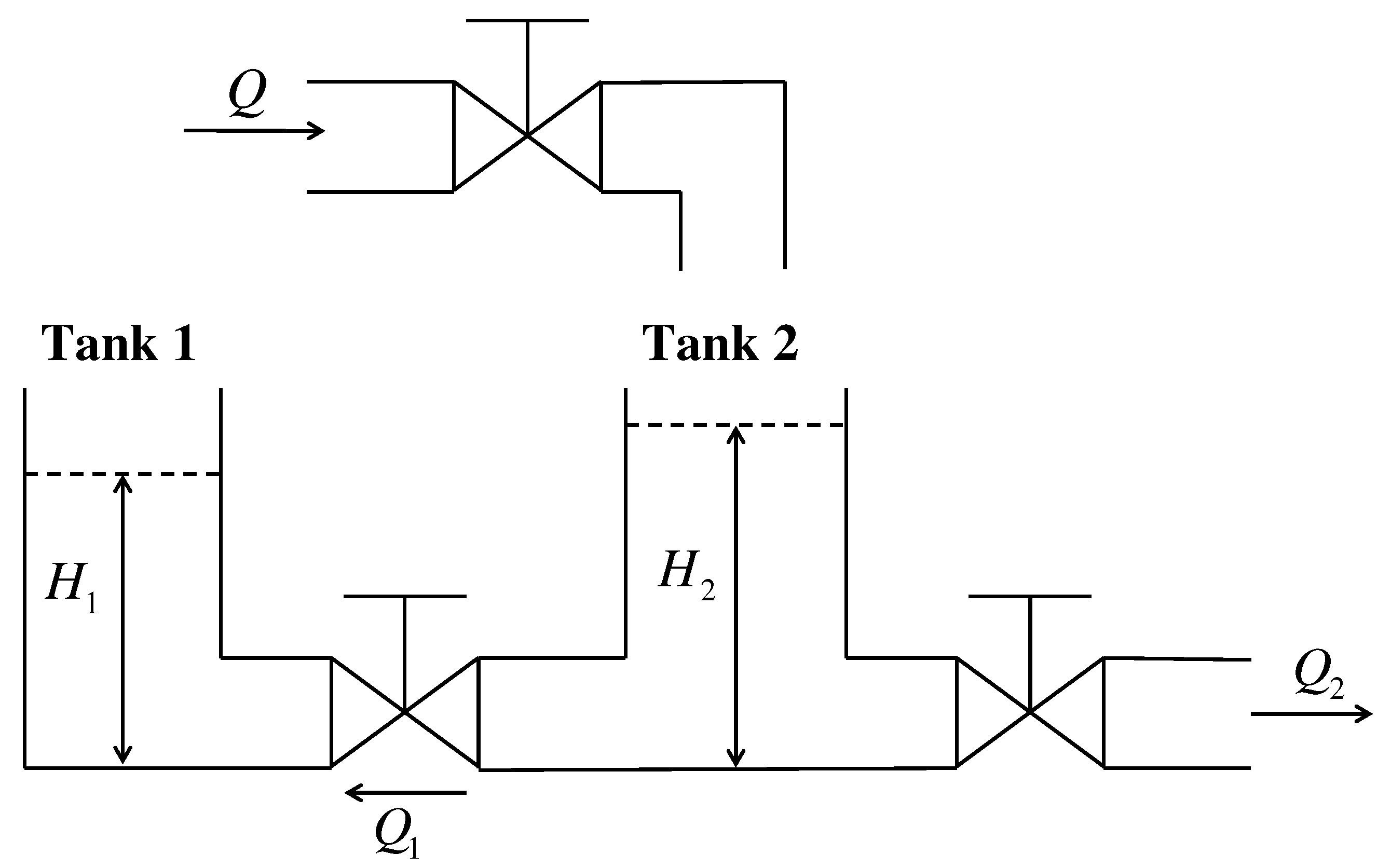
4. An Application Example
| liquid levels of tank i; | |
| H | steady-state liquid levels of two tanks; |
| cross sections of tank i; | |
| cross sections of the inlet manual valves of tanks 1 and 2; | |
| cross sections of the right outlet manual valves of tank 2; | |
| Q | inflow rate of this system; |
| inflow rate from tank 2 to tank 1; | |
| outflow rate of this system; | |
| g | gravitational acceleration. |
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rui, C.; Reyhanoglu, M.; Kolmanovsky, I.; Cho, S.; McClamroch, N.H. Nonsmooth stabilization of an underactuated unstable two degrees of freedom mechanical system. Proc. IEEE Conf. Decis. Control 1997, 4, 3998–4003. [Google Scholar]
- Cheng, D.; Lin, W. On p-normal forms of nonlinear systems. IEEE Trans. Autom. Control 2003, 48, 1242–1248. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.; Qian, C. Adding one power integrator: A tool for global stabilization of high order lower-triangular systems. Syst. Control Lett. 2000, 39, 339–351. [Google Scholar] [CrossRef]
- Ding, S.; Li, S.; Zheng, W.X. Nonsmooth stabilization of a class of nonlinear cascaded systems. Automatica 2012, 48, 2597–2606. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y. Global state feedback stabilisation for a class of more general high-order non-linear systems. IET Control Theory Appl. 2014, 8, 1648–1655. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Zhang, C.H.; Wang, Z. Adaptive disturbance attenuation for generalized high-order uncertain nonlinear systems. Automatica 2017, 80, 102–109. [Google Scholar] [CrossRef]
- Chen, C.C.; Chen, G.S. A new approach to stabilization of high-order nonlinear systems with an asymmetric output constraint. Int. J. Robust Nonlinear Control 2020, 30, 756–775. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Huang, X.; Lin, W.; Yang, B. Global finite-time stabilization of a class of uncertain nonlinear systems. Automatica 2005, 41, 881–888. [Google Scholar] [CrossRef]
- Liu, Y. Global finite-time stabilization via time-varying feedback for uncertain nonlinear systems. SIAM J. Control Optim. 2014, 52, 1886–1913. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Xue, L.R.; Zhang, K. A new approach to finite-time adaptive stabilization of high-order uncertain nonlinear system. Automatica 2015, 58, 60–66. [Google Scholar] [CrossRef]
- Fu, J.; Ma, R.; Chai, T. Global finite-time stabilization of a class of switched nonlinear systems with the powers of positive odd rational numbers. Automatica 2015, 54, 360–373. [Google Scholar] [CrossRef]
- Fu, J.; Ma, R.; Chai, T. Adaptive finite-time stabilization of a class of uncertain nonlinear systems via logic-based switchings. IEEE Trans. Autom. Control 2017, 62, 5998–6003. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Shao, Y.; Chen, C.C. Fast finite-time stability and its application in adaptive control of high-order nonlinear system. Automatica 2019, 106, 339–348. [Google Scholar] [CrossRef]
- Picó, J.; Picó-Marco, E.; Vignoni, A.; De Battista, H. Stability preserving maps for finite-time convergence: Super-twisting sliding-mode algorithm. Automatica 2013, 49, 534–539. [Google Scholar] [CrossRef]
- Chen, C.C.; Sun, Z.Y. A unified approach to finite-time stabilization of high-order nonlinear systems with an asymmetric output constraint. Automatica 2020, 111, 108581. [Google Scholar] [CrossRef]
- Chen, C.C.; Sun, Z.Y. Output feedback finite-time stabilization for high-order planar systems with an output constraint. Automatica 2020, 114, 108843. [Google Scholar] [CrossRef]
- Andrieu, V.; Praly, L.; Astolfi, A. Homogeneous approximation, recursive observer design, and output feedback. SIAM J. Control Optim. 2008, 47, 1814–1850. [Google Scholar] [CrossRef] [Green Version]
- Tian, B.; Zuo, Z.; Yan, X.; Wang, H. A fixed-time output feedback control scheme for double integrator systems. Automatica 2017, 80, 17–24. [Google Scholar] [CrossRef] [Green Version]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef] [Green Version]
- Zuo, Z. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Defoort, M.; Demesure, G.; Zuo, Z.; Polyakov, A.; Djemai, M. Fixed-time stabilisation and consensus of non-holonomic systems. IET Control Theory Appl. 2016, 10, 2497–2505. [Google Scholar] [CrossRef]
- Basin, M.; Rodríguez-Ramírez, P.; Avellaneda, F.G. Continuous fixed-time controller design for mechatronic systems with incomplete measurements. IEEE/ASME Trans. Mechatronics 2016, 23, 57–67. [Google Scholar] [CrossRef]
- Chen, C.C.; Sun, Z.Y. Fixed-time stabilisation for a class of high-order non-linear systems. IET Control Theory Appl. 2018, 12, 2578–2587. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y.; Zhang, Z.; Liu, Y. Global fixed-time stabilization for a class of switched nonlinear systems with general powers and its application. Nonlinear Anal. Hybrid Syst. 2019, 31, 56–68. [Google Scholar] [CrossRef]
- Wang, G.; Wang, B.; Zhang, C. Fixed-time third-order super-twisting-like sliding mode motion control for piezoelectric nanopositioning stage. Mathematics 2021, 9, 1770. [Google Scholar] [CrossRef]
- Ning, B.; Han, Q.L. Prescribed finite-time consensus tracking for multi-agent systems with nonholonomic chained-form dynamics. IEEE Trans. Autom. Control 2019, 64, 1686–1693. [Google Scholar] [CrossRef]
- Zuo, Z.; Defoort, M.; Tian, B.; Ding, Z. Distributed consensus observer for multi-agent systems with high-order integrator dynamics. IEEE Trans. Autom. Control 2019, 65, 1771–1778. [Google Scholar] [CrossRef] [Green Version]
- Zarchan, P. Tactical and Strategic Missile Guidance; American Institute of Aeronautics and Astronautics (AIAA): Reston, VA, USA, 2007. [Google Scholar]
- Song, Y.; Wang, Y.; Holloway, J.; Krstic, M. Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite time. Automatica 2017, 83, 243–251. [Google Scholar] [CrossRef]
- Sánchez-Torres, J.D.; Defoort, M.; Munoz-Vázquez, A.J. Predefined-time stabilisation of a class of nonholonomic systems. Int. J. Control 2020, 93, 2941–2948. [Google Scholar] [CrossRef]
- Cao, Y.; Wen, C.; Tan, S.; Song, Y. Prespecifiable fixed-time control for a class of uncertain nonlinear systems in strict-feedback form. Int. J. Robust Nonlinear Control 2020, 30, 1203–1222. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y.; Zhang, Z. Global fixed-time stabilization of switched nonlinear systems: A time-varying scaling transformation approach. IEEE Trans. Circuits Syst. II Exp. Briefs 2019, 66, 1890–1894. [Google Scholar] [CrossRef]
- Seeber, R.; Haimovich, H.; Horn, M.; Fridman, L.M.; De Battista, H. Robust exact differentiators with predefined convergence time. Automatica 2021, 134, 109858. [Google Scholar] [CrossRef]
- Kairuz, R.I.V.; Orlov, Y.; Aguilar, L.T. Prescribed-time stabilization of controllable planar systems using switched state feedback. IEEE Control Syst. Lett. 2021, 5, 2048–2053. [Google Scholar] [CrossRef]
- Tao, G.; Kokotovic, P.V. Adaptive control of plants with unknown dead-zones. IEEE Trans. Autom. Control 1994, 39, 59–68. [Google Scholar]
- Zhao, X.; Shi, P.; Zheng, X.; Zhang, L. Adaptive tracking control for switched stochastic nonlinear systems with unknown actuator dead-zone. Automatica 2015, 60, 193–200. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, S.; Zhang, B. Exact tracking control of nonlinear systems with time delays and dead-zone input. Automatica 2015, 52, 272–276. [Google Scholar] [CrossRef]
- Zhang, Z.; Park, J.H.; Zhang, K.; Lu, J. Adaptive control for a class of nonlinear time-delay systems with dead-zone input. J. Frankl. Inst. 2016, 353, 4400–4421. [Google Scholar] [CrossRef]
- Hua, C.; Li, Y.; Guan, X. Finite/fixed-time stabilization for nonlinear interconnected systems with dead-zone input. IEEE Trans. Autom. Control 2017, 62, 2554–2560. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y.; Liu, Y. Finite-time stabilization for a class of switched stochastic nonlinear systems with dead-zone input nonlinearities. Int. J. Robust Nonlinear Control 2018, 28, 3239–3257. [Google Scholar] [CrossRef]
- Gao, F.; Shang, Y.; Wu, Y.; Liu, Y. Global fixed-time stabilization for a class of uncertain high-order nonlinear systems with dead-zone input nonlinearity. Trans. Inst. Meas. Control 2019, 41, 1888–1895. [Google Scholar] [CrossRef]
- Ding, S.; Chen, W.H.; Mei, K.; Murray-Smith, D. Disturbance observer design for nonlinear systems represented by input-output models. IEEE Trans. Ind. Electron. 2019, 67, 1222–1232. [Google Scholar] [CrossRef] [Green Version]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Golestani, M.; Mobayen, S.; Din, S.U.; El-Sousy, F.F.; Vu, M.T.; Assawinchaichote, W. Prescribed performance attitude stabilization of a rigid body under physical limitations. IEEE Trans. Aerosp. Electron. Syst. 2022. [Google Scholar] [CrossRef]
- Mobayen, S.; Pouzesh, M. Event-triggered fractional-order sliding mode control technique for stabilization of disturbed quadrotor unmanned aerial vehicles. Aerosp. Sci. Technol. 2022, 121, 107337. [Google Scholar]
- Sabzalian, M.H.; Alattas, K.A.; El-Sousy, F.F.M.; Mohammadzadeh, A.; Mobayen, S.; Vu, M.T.; Aredes, M. A neural controller for induction motors: Fractional-order stability analysis and online learning algorithm. Mathematics 2022, 10, 1003. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, X.; Yao, H.; Gao, F. Global Prescribed-Time Stabilization of High-Order Nonlinear Systems with Asymmetric Actuator Dead-Zone. Mathematics 2022, 10, 2147. https://doi.org/10.3390/math10122147
Guo X, Yao H, Gao F. Global Prescribed-Time Stabilization of High-Order Nonlinear Systems with Asymmetric Actuator Dead-Zone. Mathematics. 2022; 10(12):2147. https://doi.org/10.3390/math10122147
Chicago/Turabian StyleGuo, Xin, Hejun Yao, and Fangzheng Gao. 2022. "Global Prescribed-Time Stabilization of High-Order Nonlinear Systems with Asymmetric Actuator Dead-Zone" Mathematics 10, no. 12: 2147. https://doi.org/10.3390/math10122147