
Implicit Extended Kalman Filter for Optical Terrain Relative Navigation Using Delayed Measurements

 , , , , and
, , , , and
Abstract
:1. Introduction and Background
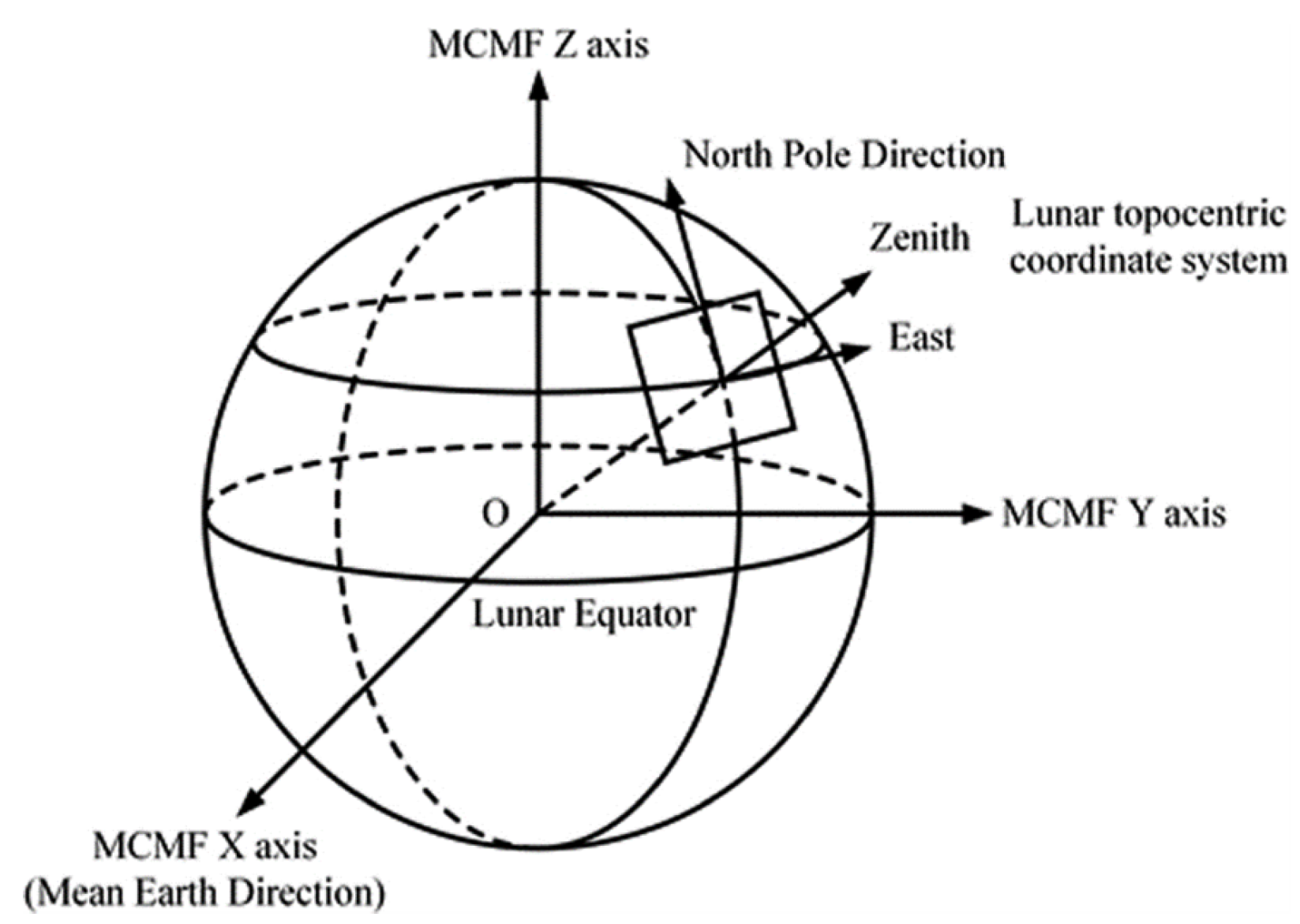
- Available database: we refer to a database when a set of known landmarks or features of the viewed terrain is cataloged, reporting their absolute location with respect to a planetocentric reference frame, e.g., ME lunar frame. The easiest example is the crater matching approach, in which known lunar craters are cataloged with their latitude and longitude with respect to a Lunar fixed frame. The detection and matching of one of the cataloged landmarks (or computer-based database features) yield a bearing measurement that can be processed to establish the global position of the spacecraft. This approach is robust and accurate but it requires at least a partial knowledge of the terrain before the spacecraft sees it.
- Unavailable database: whenever the spacecraft is flying across unknown terrains, it is impossible to establish its global position from images only. Nevertheless, local (or relative) position, is still possible using frame-to-frame methods, which generally falls into the visual odometry domain in terrestrial robotics. Methods that fall within this classification differ between each other for increasing complexity level, along with increasing computational effort. In particular, the retrieval of a three dimensional description of the scene, e.g., the creation of a map in structure-from-motion-like methods, represent one of the major trade-off to be performed when assessing the feasibility of on-board implementation. These methods solve the motion estimation task by generating a 3D sparse map. A set of 2D-to-2D correspondences is obtained, relative pose between the frames is calculated and a sparse map of 3D points is initialized exploiting triangulation. The 2D features are then tracked for each subsequent frame and correlated to the 3D map: this way a set of 3D to 2D correspondences is obtained and used to solve the perspective-n-point problem, which along with a RANSAC routine set to delete incoming outliers (wrong match between target image and map), gives as a result a first estimate of the relative position of the camera.
1.1. Normalized 8-Point Algorithm
1.2. 5-Point Algorithm
2. Navigation Algorithm Description
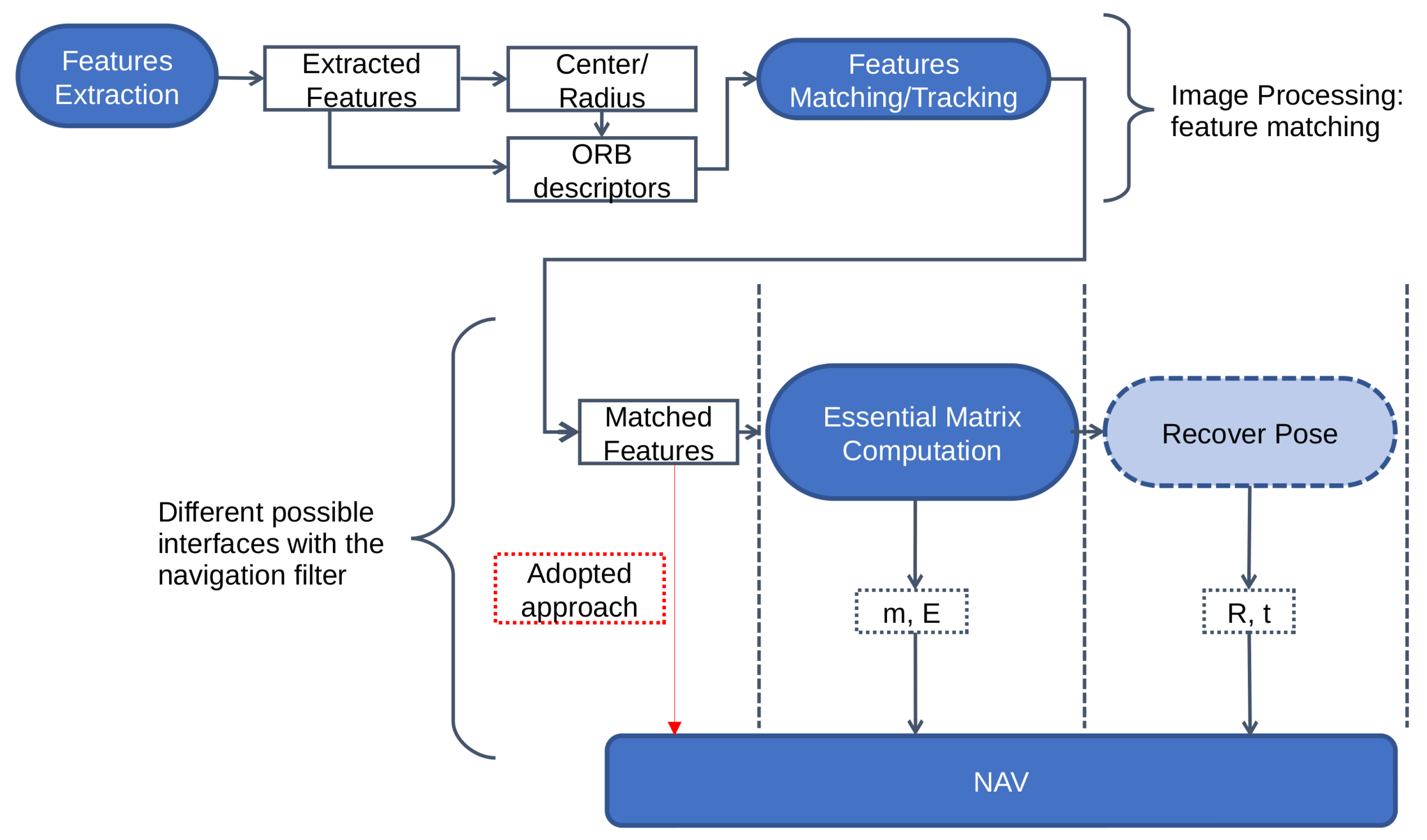
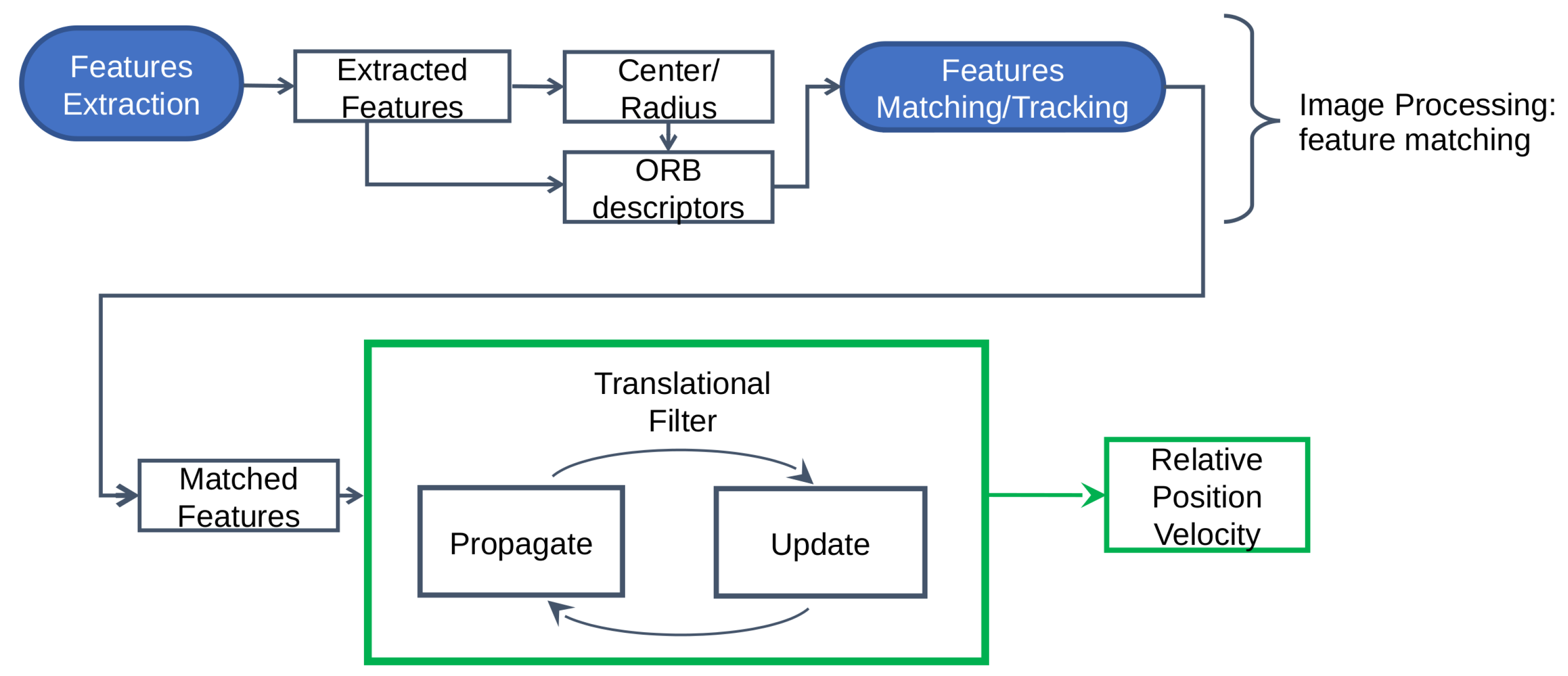
3. Feature Detection & Matching
4. Relative Navigation Filter
| Algorithm 1 Extended Kalman Filter |
|
4.1. Prediction Step
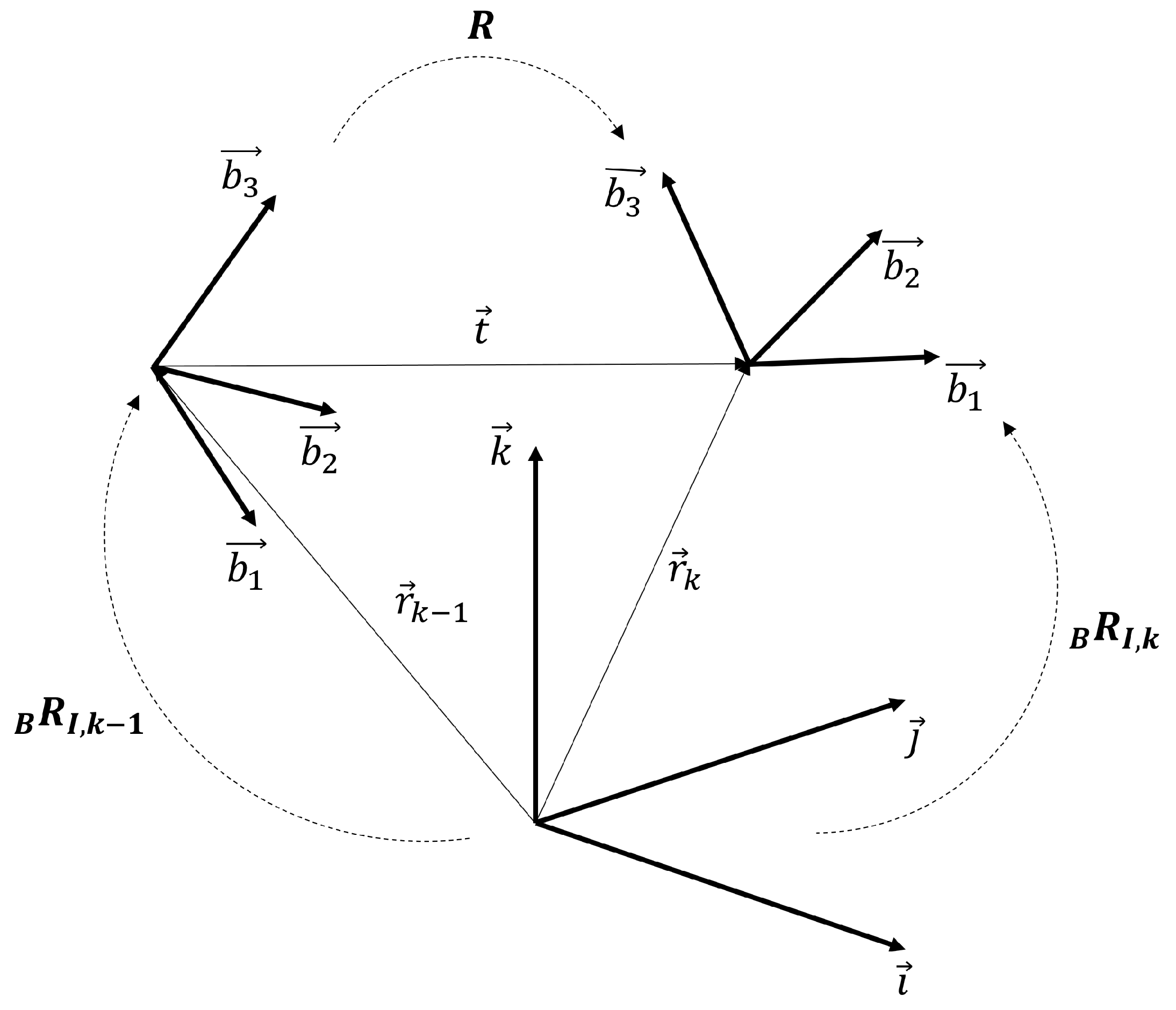
4.2. Implicit Measurement Function: The Epipolar Constraint
- : location of the matched feature i in camera frame at time instant ;
- : location of the matched feature i in camera frame at time instant k.
4.3. Correction Step
4.4. Delayed Measurements Integration
- Filter recalculation method: it consists of coupling two filters running at fast and slow rate [20]. The former incorporates the high-frequency measurements, whereas the latter is activated every time a delayed (e.g., slow and less frequent) measurement arrives. The method computes the entire trajectory of the state until the current step. Using this method, optimality is guaranteed at the cost of computational burden.
- Alexander method: it consists of updating the covariance matrices at time s as if the delayed measurement arrived. Then, once measurements are inserted at time k, the update is simply the standard Kalman filter one with a correction matrix term [21].
- Larsen extrapolation method: The method described in [21] requires the measurement matrix and the noise distribution matrix at time s. In the presented scenario, this is not valid: the measurement matrix depends on the relative positioning of the camera and craters. Larsen developed a measurement extrapolation method that does not require knowledge about the two matrices until time k [22]. This method is taken as a reference to implement a modified version suitable for the analyzed scenario.
5. Numerical Results
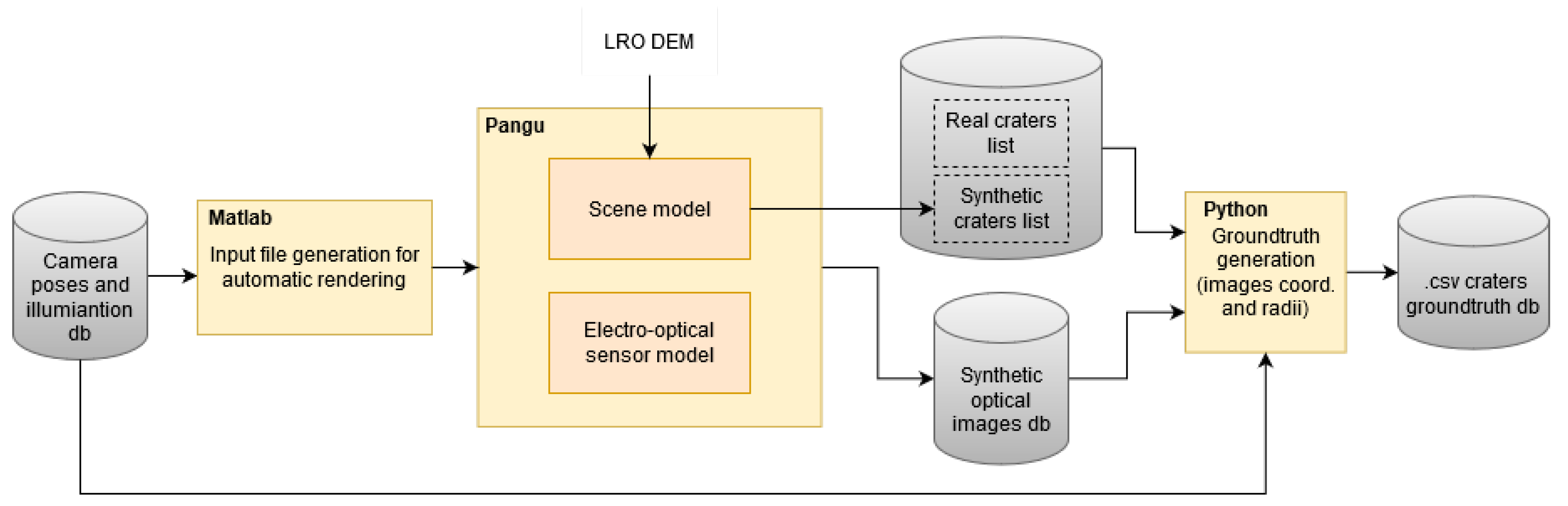
5.1. Scenario Description
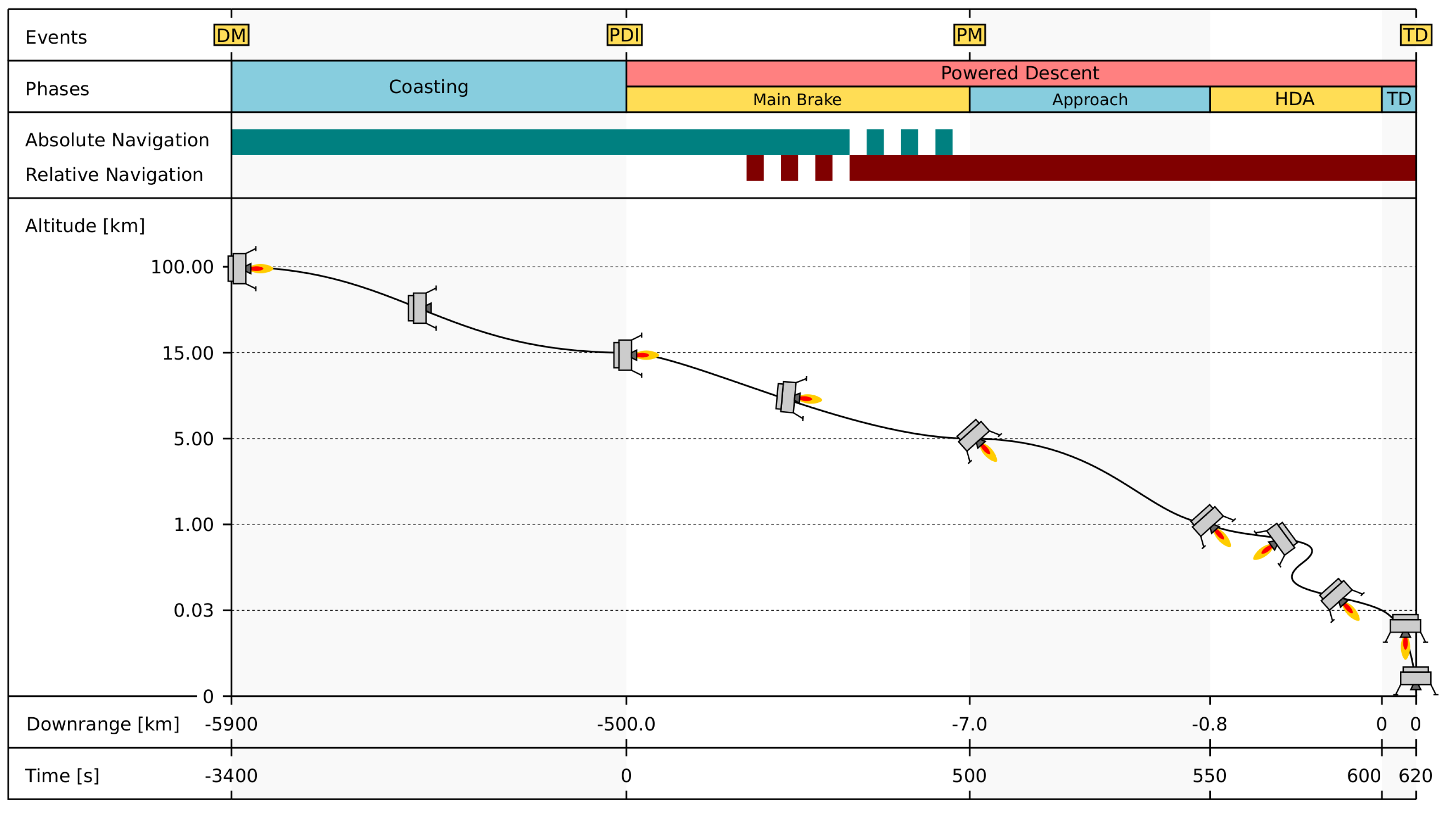
- Parking orbit (PO): the spacecraft is in its orbital motion around the Moon and performs absolute navigation with respect to the lunar fixed frame. The parking orbit is assumed to be a circular orbit with constant altitude between 250 and 100 km. The altitude 100 km is the value assumed in the paper for the lunar pinpoint landing scenario. Absolute navigation is performed. In traditional algorithms, lunar maps and craters catalog are used to determine position and velocity.
- Maneuver (DM): the spacecraft performs a tangential burn to lower the orbit perigee, inserting itself into an elliptical orbit. The lower the perigee, the lower the overall amount of fuel required for the landing maneuver. At the same time, the terrain topography pose a safety requirement on the minimum altitude of the perigee. Moreover, 15 km is a generally accepted value and is adopted as nominal value in this study.
- Coasting phase: the spacecraft follows the km elliptical transfer orbit in ballistic flight. This phase ends after half orbit at the perigee. The spacecraft performs absolute navigation.
- Powered descent initiation (PDI): the coasting phase terminates at the transfer orbit perigee, nominally at 15 km altitude. At this point, the main thrusters are turned on and the powered descent starts. In the following, the main states of the spacecraft at PDI are listed:
- -
- Downrange: [–550, –450] km
- -
- Altitude: 15 km
- -
- Velocity: ∼1700 m/s
- -
- Time to touchdown: [–600, –500] s
- Main brake phase: in this phase, the spacecraft drops most of its horizontal velocity. The thrust magnitude is constant and close to the maximum. The thrust vector pointing profile is optimized and remains close to the local horizon. During most of this phase the navigation is absolute, while in the last part relative navigation is initialized, for it is required to be running as the landing site comes into the camera field of view. At the end of the maneuver, the spacecraft is in the following state:
- -
- Downrange: [–15,000, –1500] m
- -
- Altitude: [7000, 2000] m
- -
- Velocity: [100, 60] m/s
- -
- Time to touchdown: [–100, –70] s
- Final approach phase: at the end of the main brake, the nominal landing site comes into the field of view of the navigation system. The constant thrust constraint is released and the spacecraft performs a pitch maneuver (PM) to point the thrust vector mainly toward ground. In this phase relative navigation is performed; the landing area is scanned and large diversions to the landing trajectory can be commanded to cope with errors. The state of the spacecraft at the end of the final approach is in the following ranges:
- -
- Downrange: [–800, –450] m
- -
- Altitude: [1500, 500] m
- -
- Velocity: [50, 20] m/s
- -
- Time to touchdown: [–40, –20] s
- Fine trajectory correction and hazard avoidance: below 1500 m of altitude, fine trajectory corrections (in the maximum order of magnitude of hundreds of meters) can be ordered to perform the hazard avoidance task. This phase ends on the vertical of the selected landing site at a certain altitude (tens of meters), with null horizontal velocity to ensure a vertical touch down.
- Terminal descent: powered vertical descent at constant velocity till the touchdown.
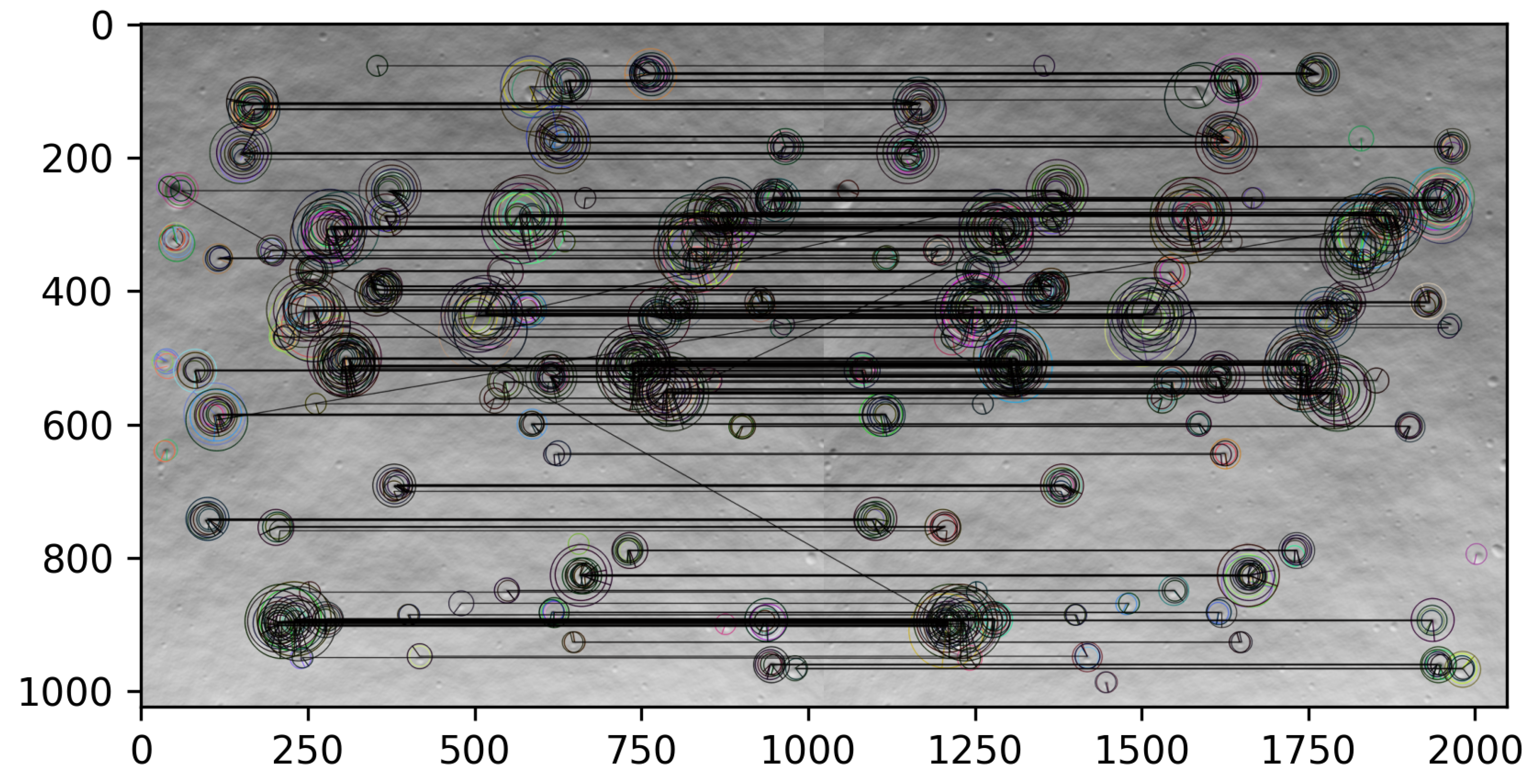
5.2. Feature Detection and Matching
## Feature extraction #-------------------- kpkm1 = orb.detect(imgOrbkm1, None) kpk = orb.detect(imgOrbk, None) # compute descriptors kpkm1, deskm1 = orb.compute(imgOrbkm1, kpkm1) kpk, desk = orb.compute(imgOrbk, kpk)
## Feature matching #------------------ # create BFMatcher object bf = cv.BFMatcher(cv.NORM_HAMMING, crossCheck=True) # match descriptors. matches = bf.match(deskm1, desk) # sort them in the order of their distance. matches = sorted(matches, key=lambda x: x.distance) ## extract the matched keypoints src_pts = np.float32([kpkm1[m.queryIdx].pt for m in matches]).reshape (-1, 1, 2) dst_pts = np.float32([kpk[m.trainIdx].pt for m in matches]).reshape (-1, 1, 2) if src_pts.shape[0] > N_FEAT : # store matched craters mkm1[frame_index-1, : N_FEAT, :] = np.squeeze(src_pts[:N_FEAT]) mk[frame_index-1, : N_FEAT, :] = np.squeeze(dst_pts[:N_FEAT])
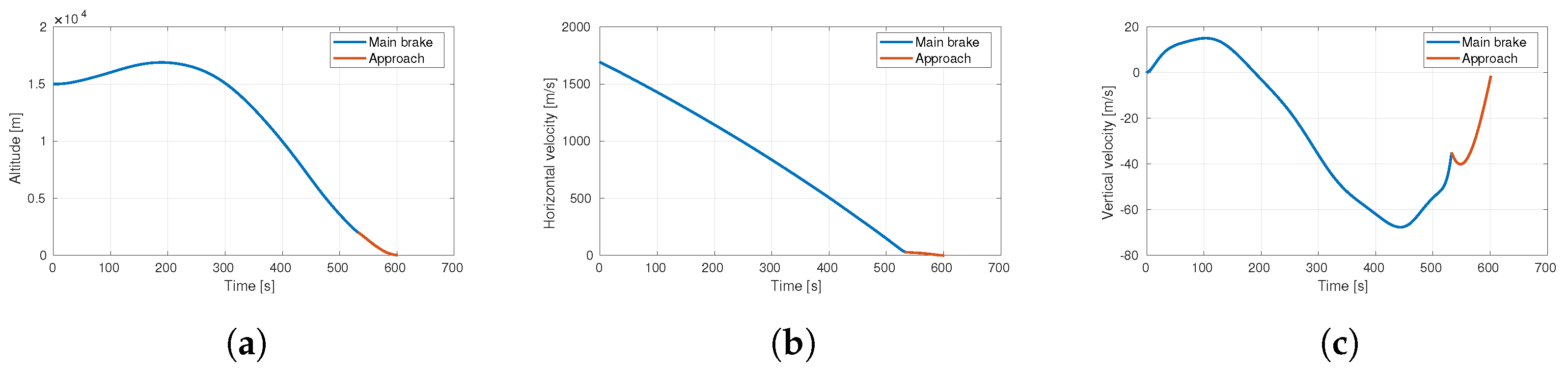
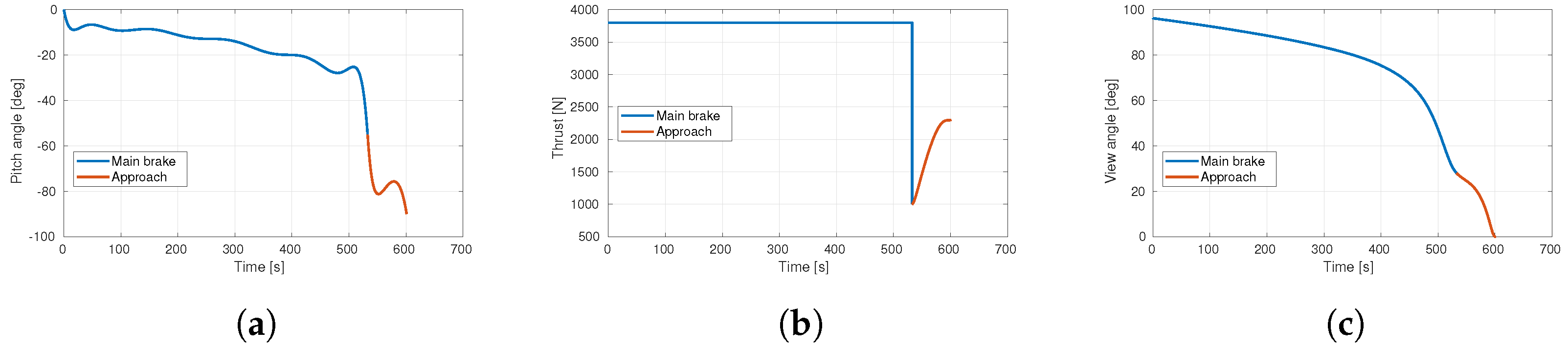
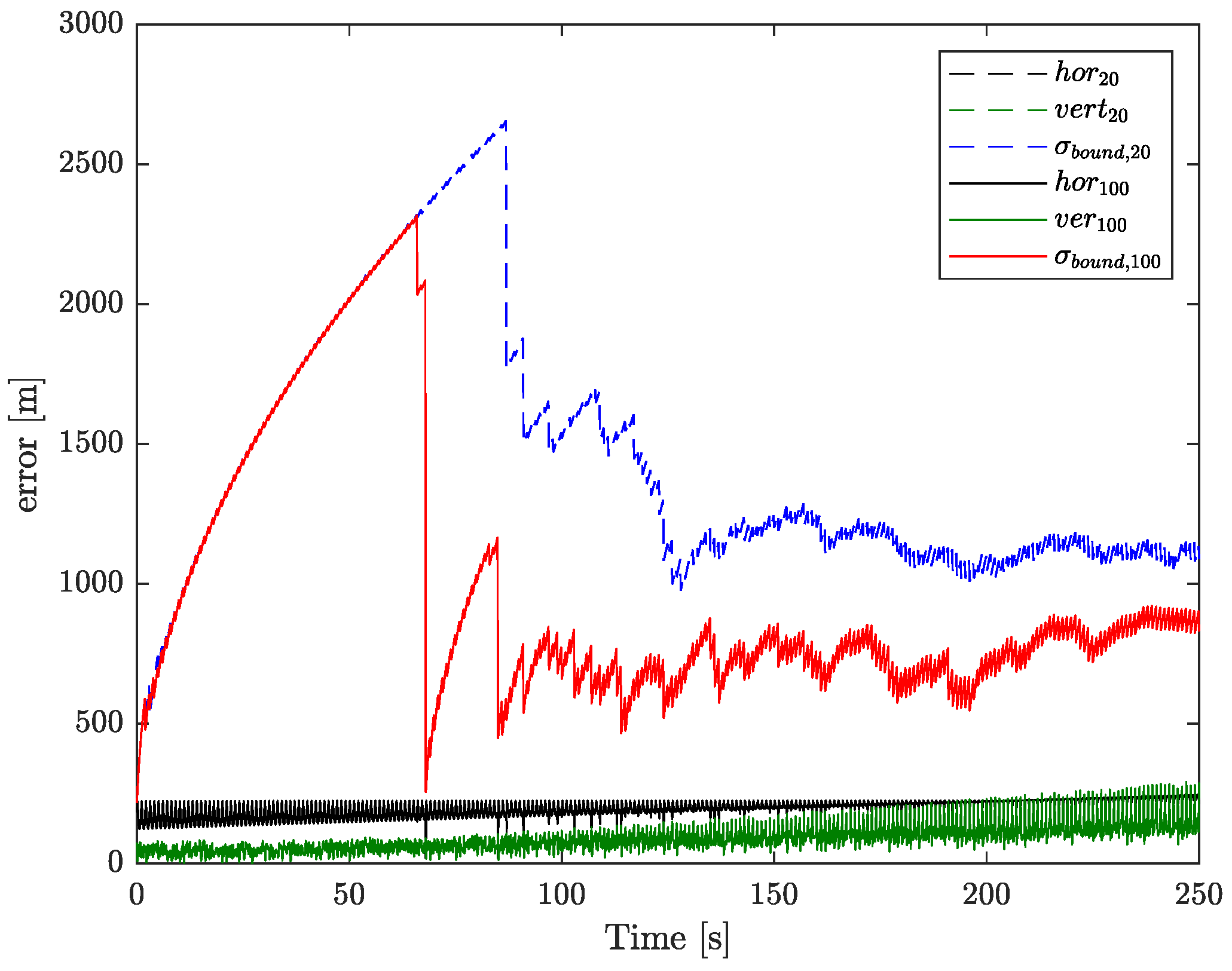
5.3. Trajectory Estimation
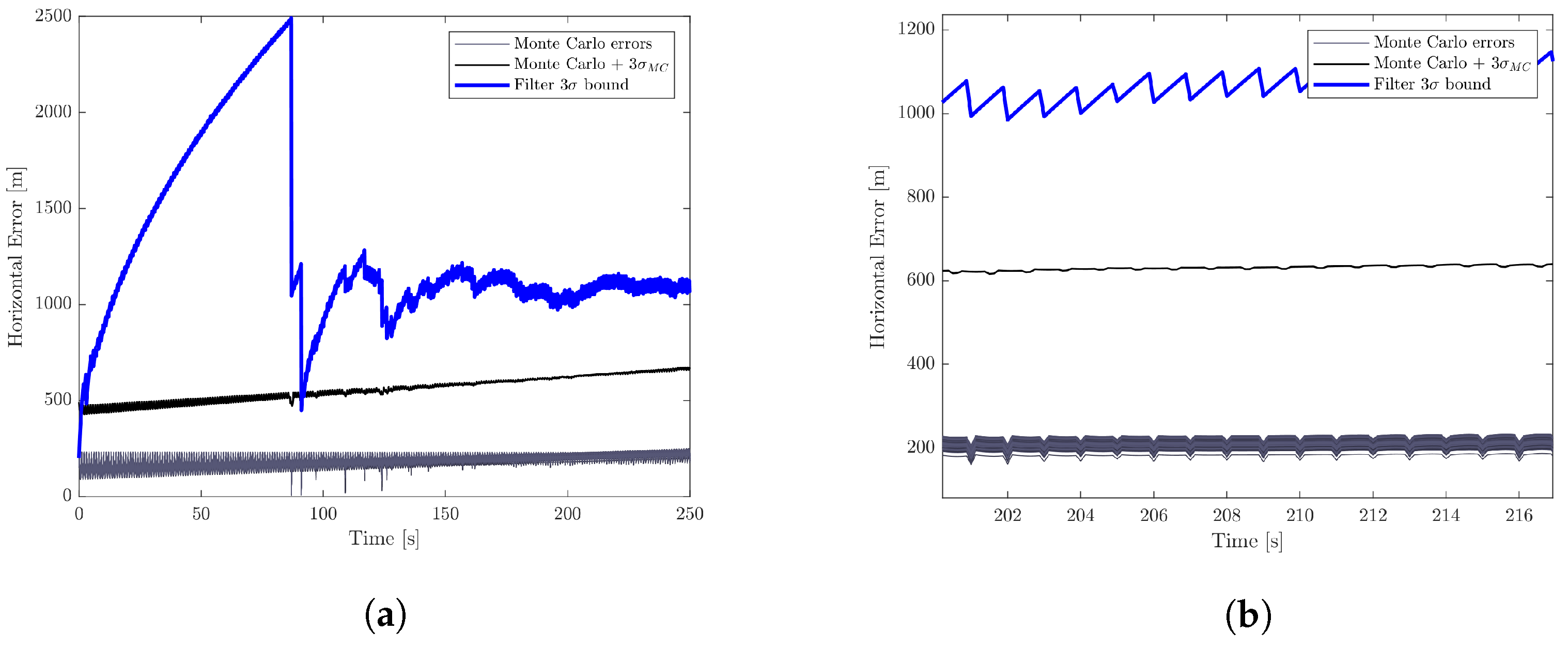
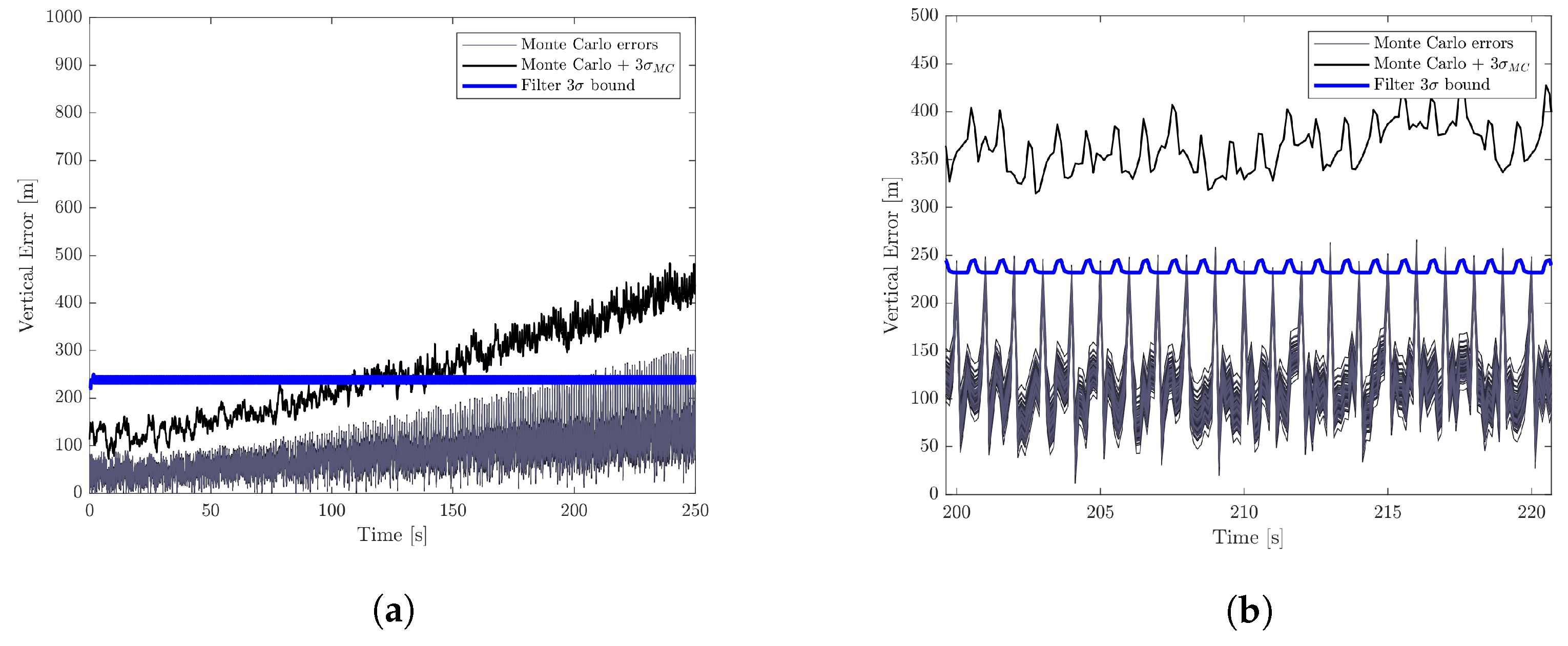
5.4. Monte Carlo Analysis
- 1
- Objective 1: to analyze global results in terms of the landing trajectory mean error to estimate product confidence levels.
- 2
- Objective 2: to analyze the estimation error throughout the trajectory to evaluate filter robustness and convergence.
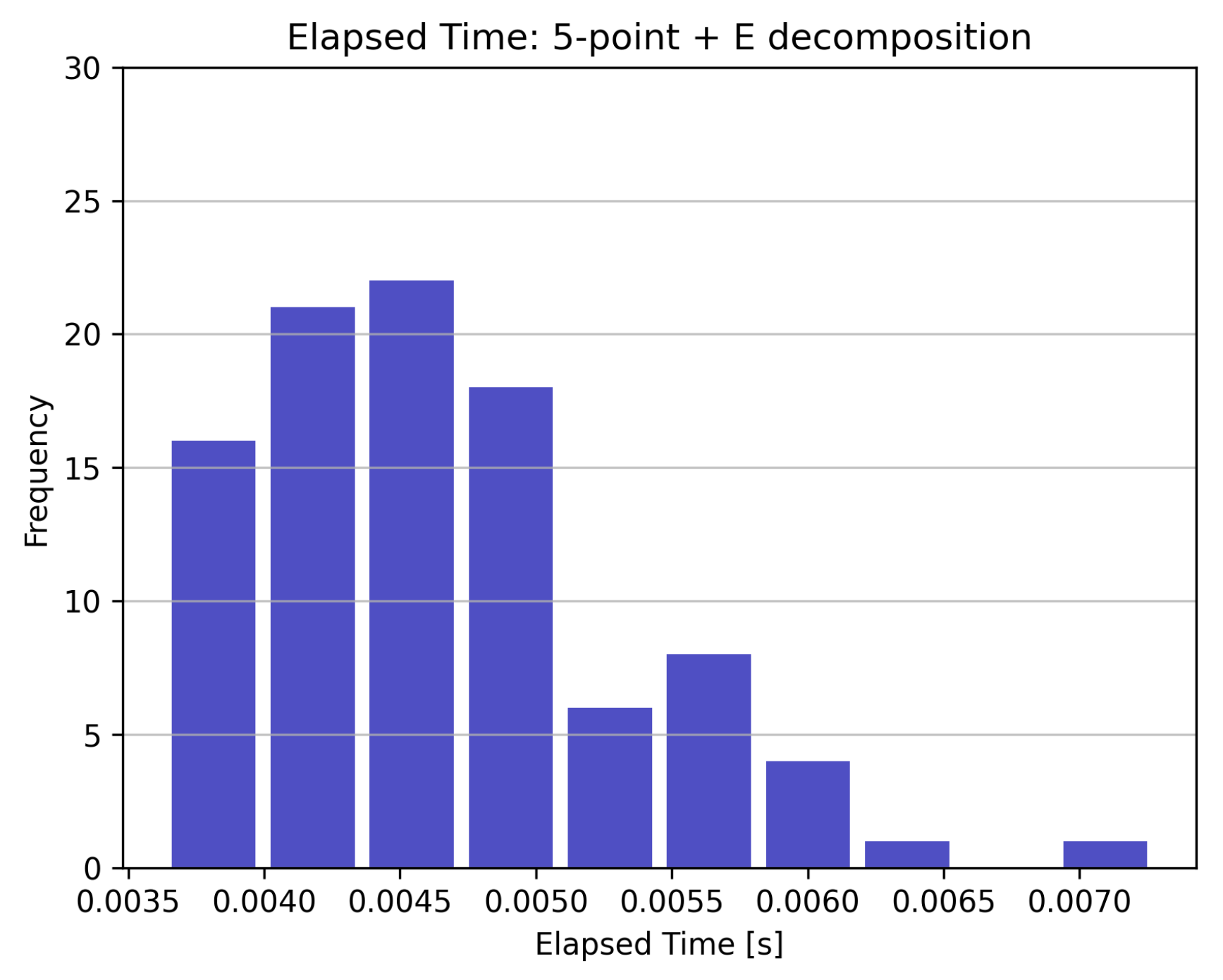
5.5. Computational Time: Comparison with Essential Matrix Pose Recovery
- IEKF:
- -
- Implicit epipolar constraint (Section 4.2);
- -
- Correction step (Section 4.3): this step would be executed in all the presented methods, but its execution time is influenced by the size of the Kalman gain matrix, measurement matrix, and measurement covariance matrix. Hence, it is reasonable to maintain its contribution in the required computational time for the IEKF where the sizes of those matrices are not negligible.
- 5-point + SVD decomposition:
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FOV | Field Of View |
| GRS | Ground Reference system |
| IEKF | Implicit Extended Kalman Filter |
| LS | Landing Site |
| ME | Mean Earth/Polar Axis |
| PD | Power Descent |
| PM | Pitch Maneuver |
| PO | Parking Orbit |
| SVD | Singular Value Decomposition |
References
- Silvestrini, S.; Piccinin, M.; Zanotti, G.; Brandonisio, A.; Bloise, I.; Feruglio, L.; Lunghi, P.; Lavagna, M.; Varile, M. Optical navigation for Lunar landing based on Convolutional Neural Network crater detector. Aerosp. Sci. Technol. 2022, 123, 107503. [Google Scholar] [CrossRef]
- Silvestrini, S.; Capannolo, A.; Piccinin, M.; Lavagna, M.; Fernandez, J.G. Centralized autonomous relative navigation of multiple spacecraft around small bodies. J. Astronaut. Sci. 2021, 68, 750–784. [Google Scholar] [CrossRef]
- Silvestrini, S.; Capannolo, A.; Piccinin, M.; Lavagna, M.; Gil-Fernandez, J. Centralized Autonomous Relative Navigation of Multiple Spacecraft Around Small Bodies. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; pp. 1–20. [Google Scholar] [CrossRef]
- Silvestrini, S.; Lavagna, M. Neural-aided GNC reconfiguration algorithm for distributed space system: Development and PIL test. Adv. Space Res. 2021, 67, 1490–1505. [Google Scholar] [CrossRef]
- Silvestrini, S.; Lavagna, M. Neural-Based Predictive Control for Safe Autonomous Spacecraft Relative Maneuvers. J. Guid. Control. Dyn. 2021, 44, 2303–2310. [Google Scholar] [CrossRef]
- Colagrossi, A.; Lavagna, M. Dynamical analysis of rendezvous and docking with very large space infrastructures in non-Keplerian orbits. CEAS Space J. 2018, 10, 87–99. [Google Scholar] [CrossRef]
- Colagrossi, A.; Pesce, V.; Bucci, L.; Colombi, F.; Lavagna, M. Guidance, navigation and control for 6DOF rendezvous in Cislunar multi-body environment. Aerosp. Sci. Technol. 2021, 114, 106751. [Google Scholar] [CrossRef]
- Colombi, F.; Colagrossi, A.; Lavagna, M. Characterisation of 6DOF natural and controlled relative dynamics in cislunar space. Acta Astronaut. 2021, 196, 369–379. [Google Scholar] [CrossRef]
- Johnson, A.E.; Montgomery, J.F. Overview of Terrain Relative Navigation Approaches for Precise Lunar Landing. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Silvestrini, S.; Lavagna, M. Processor-in-the-Loop Testing of AI-aided Algorithms for Spacecraft GNC. In Proceedings of the 71st International Astronautical Congress, Dubai, United Arab Emirates, 12–16 October 2020; pp. 12–14. [Google Scholar]
- Losi, L. Visual Navigation for Autonomous Planetary Landing. Master’s Thesis, Politecnico di Milano, Milan, Italy, 2016. [Google Scholar]
- Guo, H.; Fu, W.; Liu, G. Frontiers of Moon-Based Earth Observation. In Scientific Satellite and Moon-Based Earth Observation for Global Change; Springer: Singapore, 2019; pp. 541–590. [Google Scholar]
- Silvestrini, S.; Lunghi, P.; Piccinin, M.; Zanotti, G.; Lavagna, M. Artificial Intelligence Techniques in Autonomous Vision-Based Navigation System for Lunar Landing. In Proceedings of the 71st International Astronautical Congress, Dubai, United Arab Emirates, 12–16 October 2020; pp. 12–14. [Google Scholar]
- Lunghi, P.; Ciarambino, M.; Lavagna, M. A multilayer perceptron hazard detector for vision-based autonomous planetary landing. Adv. Space Res. 2016, 58, 131–144. [Google Scholar] [CrossRef]
- Lunghi, P.; Lavagna, M. Autonomous Vision-Based Hazard Map Generator for Planetary Landing Phases. In Proceedings of the 65th International Astronautical Congress (IAC), Toronto, ON, Canada, 3 October 2014; pp. 5103–5114. [Google Scholar]
- Xu, C.; Wang, D.; Huang, X. Autonomous Navigation Based on Sequential Images for Planetary Landing in Unknown Environments. J. Guid. Control. Dyn. 2017, 40, 2587–2602. [Google Scholar] [CrossRef]
- Soatto, S.; Perona, P. Recursive 3-D Visual Motion Estimation Using Subspace Constraints. Int. J. Comput. Vis. 1997, 22, 235–259. [Google Scholar] [CrossRef]
- Webb, T.P.; Prazenica, R.J.; Kurdila, A.J.; Lind, R. Vision-based state estimation for autonomous micro air vehicles. J. Guid. Control. Dyn. 2007, 30, 816–826. [Google Scholar] [CrossRef]
- Comellini, A.; Casu, D.; Zenou, E.; Dubanchet, V.; Espinosa, C. Incorporating delayed and multirate measurements in navigation filter for autonomous space rendezvous. J. Guid. Control. Dyn. 2020, 43, 1164–1172. [Google Scholar] [CrossRef]
- Alexander, H.L. State estimation for distributed systems with sensing delay. SPIE Data Struct. Target Classif. 1991, 1470, 103–111. [Google Scholar]
- Larsen, T.D.; Andersen, N.A.; Ravn, O.; Poulsen, N.K. Incorporation of time delayed measurements in a discrete-time Kalman filter. Proc. IEEE Conf. Decis. Control. 1998, 4, 3972–3977. [Google Scholar] [CrossRef]
- Silvestrini, S.; Lunghi, P.; Piccinin, M.; Zanotti, G.; Lavagna, M. Experimental Validation of Synthetic Training Set for Deep Learning Vision-Based Navigation Systems for Lunar Landing. In Proceedings of the 71st International Astronautical Congress, Dubai, United Arab Emirates, 12–16 October 2020; pp. 12–14. [Google Scholar]
- Piccinin, M.; Silvestrini, S.; Zanotti, G.; Brandonisio, A.; Lunghi, P.; Lavagna, M. ARGOS: Calibrated facility for Image based Relative Navigation technologies on ground verification and testing. In Proceedings of the 72nd International Astronautical Congress (IAC 2021), Dubai, United Arab Emirates, 25–29 October 2021; pp. 1–11. [Google Scholar]
- Bradski, G. The OpenCV Library. Dr. Dobb’s J. Softw. Tools 2000, 25, 120–123. [Google Scholar]
- Hanson, J.M.; Beard, B.B. Applying Monte Carlo Simulation to Launch Vehicle Design and Requirements Analysis; Technical Report NASA TP-2010-216447; NASA—Marshall Space Flight Center: Washington, DC, USA, 2010. [Google Scholar]
- Nister, D. An efficient solution to the five-point relative pose problem. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 756–770. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Description |
|---|---|---|
| =20, 100 | 50 | Maximum number of processed matched features |
| diag() | Initial Covariance Matrix | |
| Elementary crater localization error covariance | ||
| Elementary altimeter error variance |
| Parameter | Distribution | |
|---|---|---|
| 100 m | Gaussian | |
| 0.1 m/s | Gaussian | |
| diag() | Gaussian | |
| Gaussian | ||
| Gaussian |
| Metric | [m] | [m] | |
|---|---|---|---|
| horizontal error | 193.9 | 27.3 | 0.9 |
| vertical error | 97.8 | 23.6 | 0.8 |
| Algorithm | Mean [s] | [s] |
|---|---|---|
| IEKF-correction | 0.0012 | 0.0006 |
| 5-point + SVD | 0.0047 | 0.0015 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silvestrini, S.; Piccinin, M.; Zanotti, G.; Brandonisio, A.; Lunghi, P.; Lavagna, M. Implicit Extended Kalman Filter for Optical Terrain Relative Navigation Using Delayed Measurements. Aerospace 2022, 9, 503. https://doi.org/10.3390/aerospace9090503
Silvestrini S, Piccinin M, Zanotti G, Brandonisio A, Lunghi P, Lavagna M. Implicit Extended Kalman Filter for Optical Terrain Relative Navigation Using Delayed Measurements. Aerospace. 2022; 9(9):503. https://doi.org/10.3390/aerospace9090503
Chicago/Turabian StyleSilvestrini, Stefano, Margherita Piccinin, Giovanni Zanotti, Andrea Brandonisio, Paolo Lunghi, and Michèle Lavagna. 2022. "Implicit Extended Kalman Filter for Optical Terrain Relative Navigation Using Delayed Measurements" Aerospace 9, no. 9: 503. https://doi.org/10.3390/aerospace9090503