1. Introduction
In the field of commercial launchers, nowadays, there are two directions for reducing the costs: achievement of the launcher families with modular launchers like ANGARA [
1] and DELTA [
2], which allow insertion on different orbits of all sorts of payloads and achievement of the reusable launchers, as it is done in the FALCON program [
3,
4], developed by Space X. A problem stemming from these trends is the development of an advanced navigation, control and guidance system that can solve the guidance problem for the entire launcher family or make complex maneuvers for the reusable launchers. A Launcher Testing Vehicle (LTV) can be used as an independent stage to solve these complex problems with a low development cost, with the propulsion and control system to test in flight and the launcher guidance navigation and control system (GNC).
In our vision, the Launch Testing Vehicle (LTV) is similar to the vehicle used for landing on a celestial body (Moon, Mars). Discussing technical solutions, the reference landing vehicle Apollo Lunar Module [
5,
6] uses a descending throttleable engine for landing and an ascent engine for docking. This approach also uses a reaction control system (RCS) having two blocks with four thrusters each for attitude control. An alternative technical solution for a Lunar Lander Demonstrator (LLD) is presented in the paper [
7]. LLD has five large descending thrusters and eight small thrusters for attitude control. Many fixed thrusters allow the use of on/off modulation to control roll pitch and yaw without throttling or gimbaling for thrust vectoring control (TVC).
Among the important projects for reusable launchers, we can mention STARSHIP [
8], developed by SpaceX Company(Hawthorne, USA), whose technical solution is based on the multiple Raptor Engine with gimbal capability and aerodynamic surfaces (flaps) for control. Another is the CALLISTO project [
9], developed in cooperation with Centre National d’Etude Spatiales (CNES), Japan Aerospace Exploration Agency (JAXA), and Deutsches Zentrum fur Luft-und Raumfahrt (DLR), whose technical solution is based on the RV-X engine, developed by JAXA, which will have gimbaling, throttling and re-ignition capability. Moreover, the project supposes the aerodynamic surfaces (fins) and RCS with 6–8 thrusters for control.
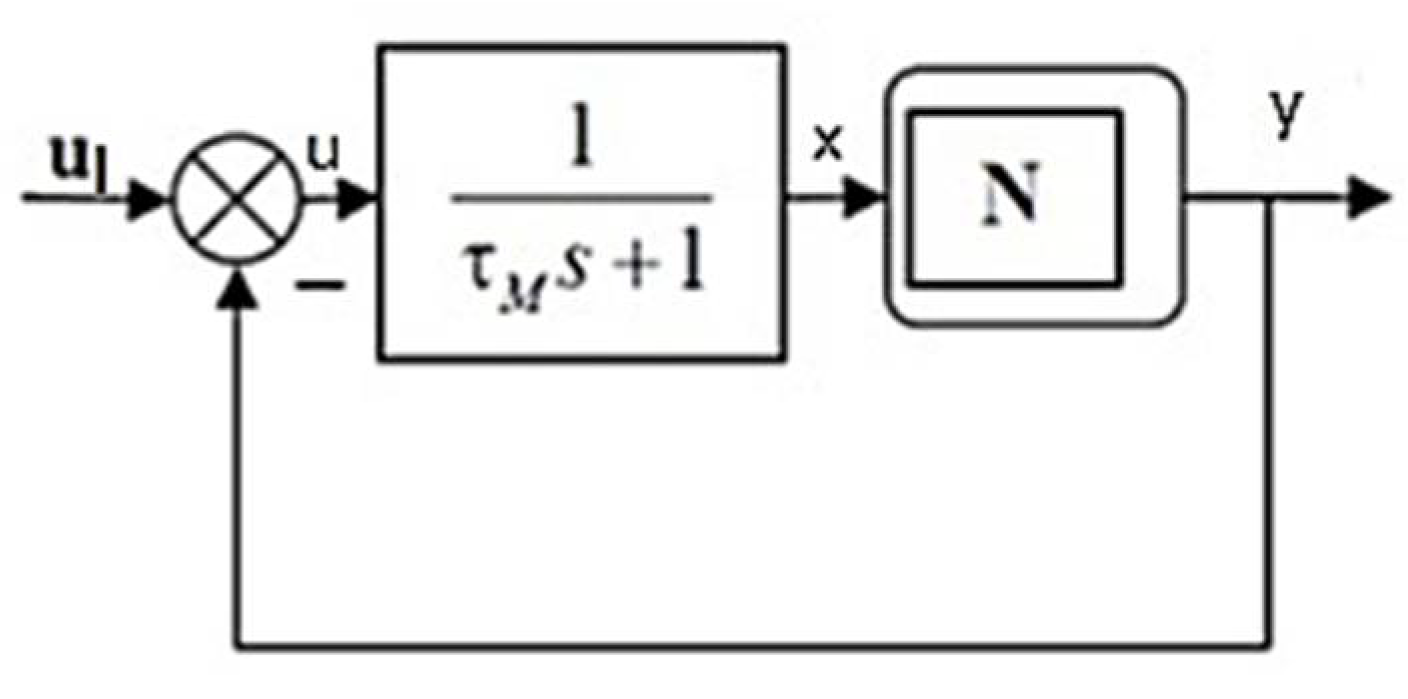
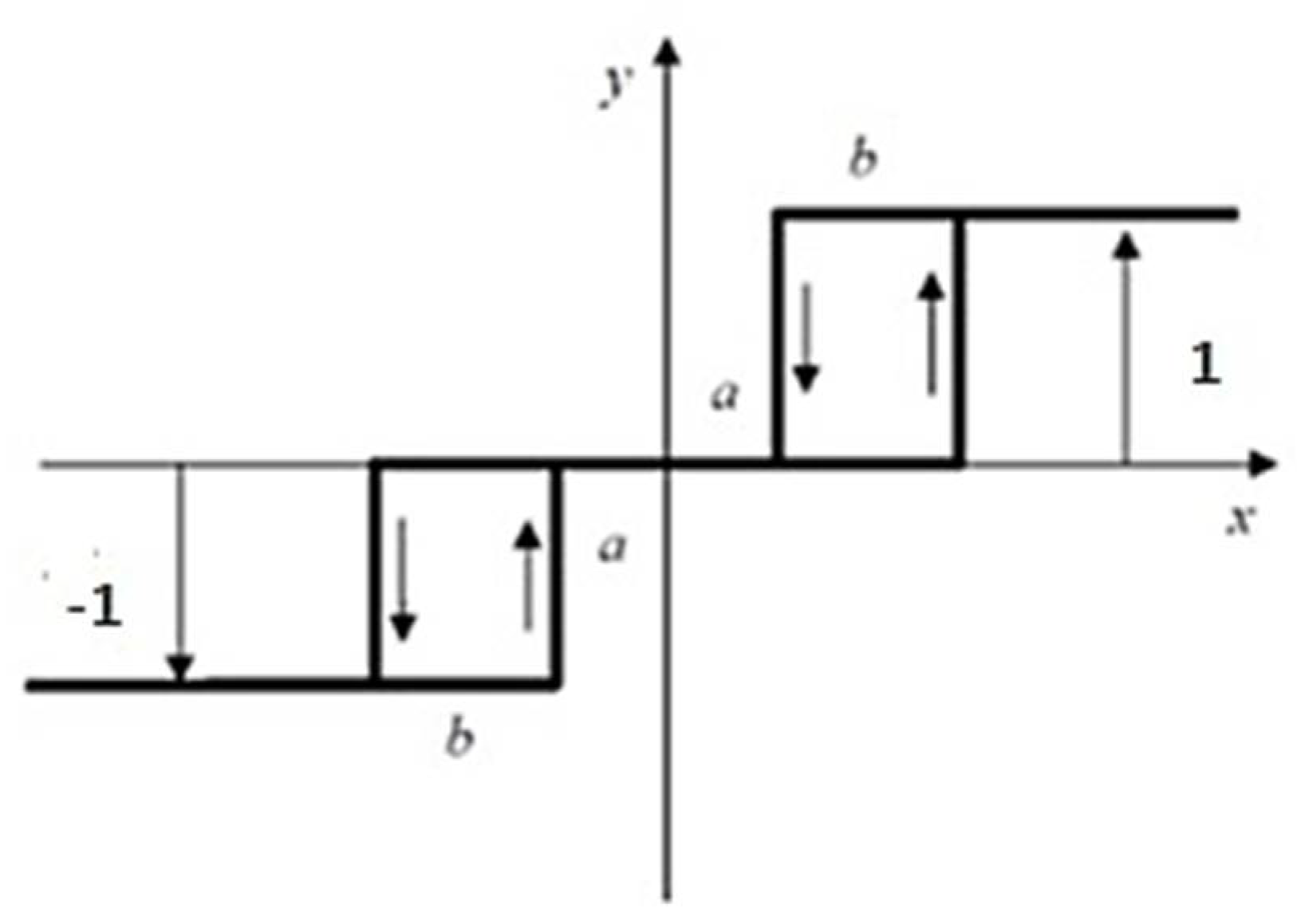
Different from these solutions, specific for landing vehicles, in this paper, we will consider a Launch Testing Vehicle (LTV) based on thrust vectoring control (TVC) using a throttleable engine with gimbal capability for pitch and yaw, and separately, two RCS blocks with two thrusters each with Pulse Width -Pulse Frequency modulation (PWPF) [
10,
11] for roll control. In order to simplify the technical solution, we do not use aerodynamic surfaces, which are inefficient for low velocity.
Currently, a number of current studies [
12,
13] focus on determining an optimal evolution, in terms of low fuel consumption, by applying convex optimization methods on models with three degrees of freedom (3DOF) for complex evolutions.
Unlike these, the current paper proposes developing a calculation model with six degrees of freedom (6DOF), similar to that of the launchers, to underpin the vehicle’s subsequent development and conduct preliminary flight tests. The model will focus on the movement’s control and stability, aiming to evaluate the vehicle’s performance in terms of the flight envelope and guidance accuracy. For the synthesis of the guidance system, linear models for longitudinal and lateral movement in the local frame based on the Hamilton quaternion are developed. Applying Linear Quadratic Regulator (LQR) synthesis, we will obtain an optimal regulator, and the gains used in control signals will be defined.
For performance evaluation, two simple hypothetical scenarios will be considered, one for vertical evolution, which allows the determination of the maximum altitude, and one for horizontal evolution, which allows the determination of the maximum flight distance, both cases for a fixed amount of fuel. Based on these two scenarios, for two test cases, the landing accuracy will be evaluated in the conditions of the parametric uncertainty of the model as well as the noise introduced by the sensors. Additionally, for a test case in the second scenario, the uniform and turbulent wind influence on lateral movement will be evaluated.
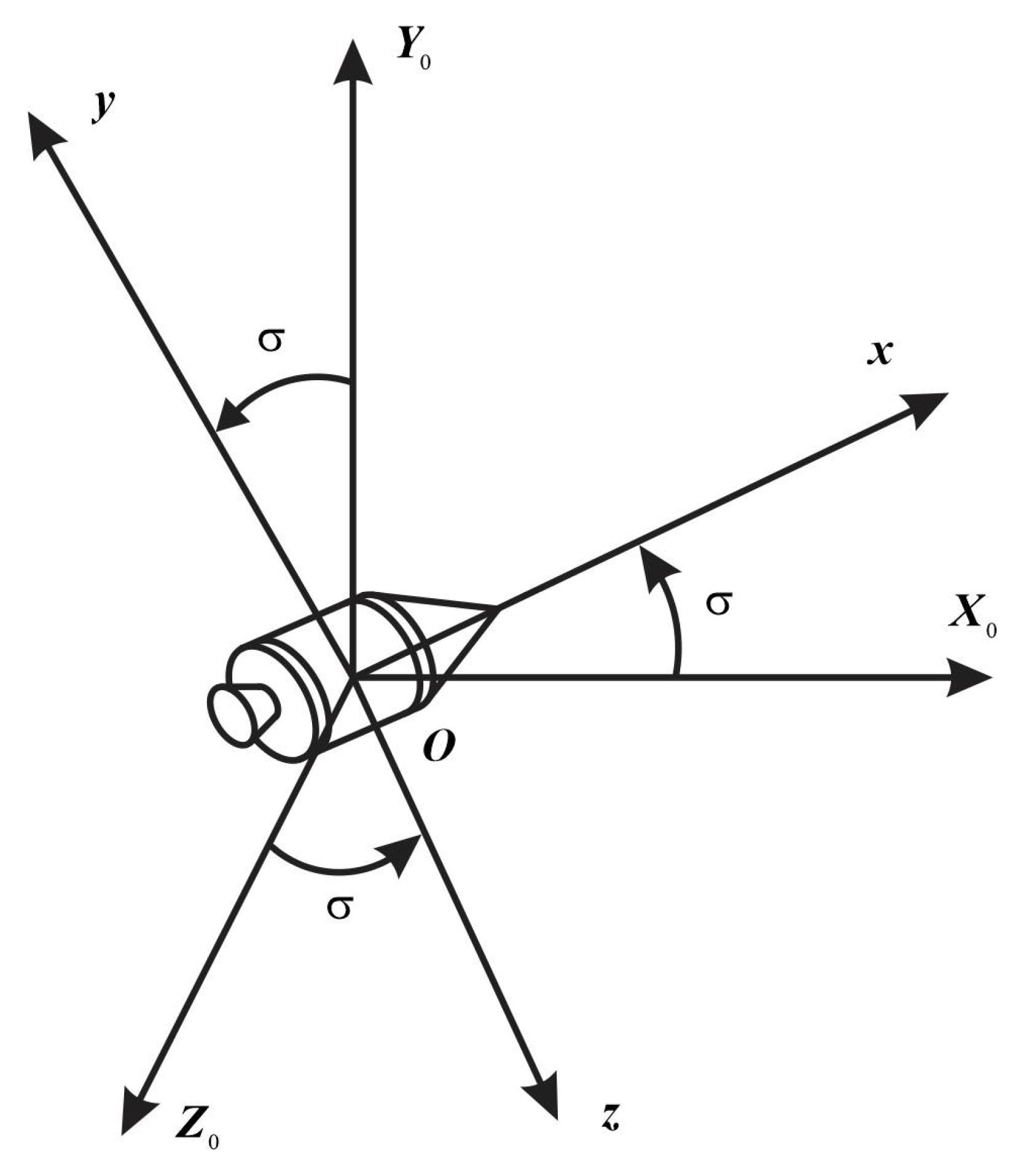
Taking into consideration the work objectives to implement a calculus model for LTV, which will be used to validate GNC for the launcher, the reference frames used are similar to those used for the launcher model described in detail in prior work [
14,
15]. This is characterized by the y-axis of the local frame oriented vertically upwards and, in the case of Euler angles, the order of rotations 3-2-1 from the local frame to the body frame.
Similar to launchers, because of their shape, the LTV has the aerodynamic focus in front of the center of mass, translating into static instability, which leads to a similar approach regarding the control problem. Different from the launcher, for LTV, some simplifying assumptions related to low velocities and distance domains will be made concerning the frames and the movement equations.
In summary, the novelties proposed by the paper, related to other similar approaches, are:
A simplified technical control solution based only on propulsion. The technical solution is similar to lunar landing vehicles. Still, it is customized for the evolution of launchers by considering the aerodynamic terms in the model and the atmospheric, disturbing effects.
Formulation of the control problem based on linear coordinates in the local frame and the quaternion. Unlike our previous paper [
16], we introduced the control of linear coordinates to improve guidance, especially landing accuracy, and we used quaternions to ensure the robustness of the model
Evaluation of system performance in the flight envelope and landing accuracy with a highlight on the influence of uniform wind, turbulent wind, sensor noise, and uncertainty of the model parameters.
The paper’s major contribution, which can be considered a contribution to the state of the art, consists of base movement analysis and linear model, both dedicated for the testing vehicle.
As will be shown during the work, for the technical solution adopted, the basic movement is close to landing on a celestial body despite the presence of the atmosphere.
Regarding the linear form of the motion equations, unlike most works [
17] that use the velocity frame for the linear form of translational equations, the local frame will be used in our work, which will facilitate the control of the linear coordinates.
Appendix A of the paper will present the method of obtaining the coupled linear form of the equations of motion.
In addition, for the avoidance of singularities and the system’s robustness for describing the attitude, including in the linear form, the quaternion was used, which constitutes an additional element regarding the contributions of the work.
For the verification of the model but also for the design of a methodology for evaluating the vehicle’s performance, two flight scenarios will be considered in both situations. The test was performed with the control based on the previously specified linear model, which was included in the 6 DOF nonlinear model.
3. Base Movement, Linear Form of the Equation of Motion, Stability and Command Matrices
To define the base movement, we start from the dynamic equations for translation (4) and rotation (9). Due to the initial hypothesis for the equation of motion, the Earth is considered a flat surface that does not rotate; the gravity acceleration does not depend on the orientation of the local frame, which can be arbitrarily chosen. In this case, we can suppose, without reducing the problem generality, that the base movement takes place in a vertical plane
of a local frame, the lateral motion being null. Simultaneously, we suppose a configuration with two symmetry planes adopted for the inertia matrix in dynamic rotation equations, and we can choose the roll angle null. That means in the base movement; we have only
as an independent parameter, the other quaternions components being:
In this case, the rotation matrix (5) becomes:
From the translation equation, we will consider the relations in the vertical plane:
where we denoted
, and from rotation equations, we hold the pitch equation:
If we cancel the velocity derivatives, it results:
and from the pitch equation, we cancel the angular acceleration, obtaining:
The nonlinear system (40), (41) can be solved with Newton’s iterative algorithm. If we impose as a base movement the horizontal flight at a specified altitude and velocity, from Equations (40) and (41), we obtain the component , and thrust components , , the thrust moment in pitch being linked to the component of the thrust given by Equation (27).
From thrust components, we can obtain the throttling command
and the angular pitch thrust command
, which means the equilibrium commands:
Taking into consideration that the actuators in Equation (25) have unitary gain, the guidance signals equilibrium commands and from the relation (18) can be obtained with the relations (42).
Having base movement defined, considering as commands: throttling command the angular deflections , , and equivalent command the stability matrix and the command matrix can be obtained. For cross-checking, the stability and command matrices were determined both numerically and by analytical relations, obtaining identical results. For clarity, next, we present their analytical expressions.
Because in the base movement, the longitudinal motion is decupled from lateral motion, we will separately analyze these two motions.
Starting from the coupled linear development presented in
Appendix A, for longitudinal motion, having the states
and the commands
the linear form of the equations are:
where
and the drag dependence of the velocity and the altitude is given by:
Denoting:
we obtain for the longitudinal motion the stability matrix in
Table 1Because in longitudinal motion, the controlled states differ from the ascending/descending evolutions to the horizontal evolution, we will define a separate stability matrix and command matrix for each type of longitudinal evolution.
For longitudinal motion in ascending/descending evolution, the states are
and the commands are
Because in this particular case, the basic movement has supplementary conditions:
the stability matrix has the form from
Table 3,
and the command matrix has the form from
Table 4.
For longitudinal motion in horizontal evolution, the states are
and the commands are
Because in this particular case, the basic movement has the supplementary condition:
The stability matrix has the form from
Table 5,
and the command matrix has the form from
Table 6.
Starting from the coupled linear development presented in
Appendix A, for lateral motion, the states are
and the commands are
the linear form of the equations are:
Denoting:
we obtain for the lateral motion the stability matrix shown in
Table 7and the command matrix shown in
Table 8.
For lateral motion in ascending/descending evolution, considering condition (45), the matrix elements become:
For lateral motion in horizontal evolution, considering condition (47), the matrix elements become:
4. Linear Form of the Guidance Signals, the Regulator’s Design
The linearization of guidance signals will be done related to the system’s states:
Velocity in local frame:
Coordinate in local frame:
Angular velocity in body frame:
Attitude (quaternion):
First, we linearized the error quaternion given by relation (17). Considering for the basic movement, the desired quaternion is equal to the basic quaternion, the relation (17) becomes:
Separating the deviation of the desired quaternion as an input signal and considering:
we obtain:
where the input signals are:
Next, we linearized the axial velocity control (19). Considering the basic movement, the linear form of the relation (19) becomes:
where
is an input signal containing desired axial velocities.
On the other hand, for basic movement, the elements of the rotation matrix (3) become:
This means that the relationship (57) becomes:
Having the quaternion-related functions linearized, we will look for the linear form of the guidance signal for linear coordinates in different evolutions.
For ascending/descending evolution, the linear coordinate signal in local frame (20) becomes:
where
is the input signal containing the desired linear coordinates.
Then, for
corresponding base movement for
, we add axial velocity control (59):
For horizontal evolution, the linear coordinate in the local frame (21) became:
Then, for
we add axial velocity control (58), (59):
If we neglected the time delay introduced by actuator Equations (25) and (34), we obtain a direct link between the linear form of the guidance signals and commands:
In this case, starting from the scalar form of the guidance signals (18), we can write the linear form of the command components directly, separately, for the two motions.
The command for longitudinal motion in ascending/descending evolution becomes:
Denoting:
we obtain the regulator matrix indicated in
Table 9.
The command for longitudinal motion in horizontal evolution becomes:
Denoting:
we obtain the regulator matrix shown in
Table 10.
The commands for lateral motion in all evolutions are:
Denoting:
the regulator matrix for lateral motion is shown in
Table 11.
To obtain the matrix terms, as shown in work [
28], we can apply an LQR synthesis to an optimal regulator. The problem implies solving an algebraic Riccati equation.
Finally, the control coefficients introduced in control signals relations (18)–(21) can be obtained from the regulator’s elements:
For longitudinal motion in ascending/descending evolution, are obtained directly, while the others are given by: .
For longitudinal motion in horizontal evolution, is obtained directly, while the others are given by: .
For lateral motion, are obtained directly, while the others are given by: ; .
5. Model Parameters, Flight Scenarios, Results
5.1. Model Parameters
To build a performance evaluation methodology, including the quality of the guidance system, it is necessary to define a realistic LTV model. Since the data for such test vehicles is uncertain, we will refer to the information for classical launcher stages. For this purpose, we consider the Lox-Kerosene pair as fuel for the rocket engine, which is a common solution found in a series of classic (Soyuz) but also current launchers (Atlas V, Antares, Falcon 1, Falcon 9)
If we adopt an initial take-off mass, the ratio between the structural mass and the mass at the start is defined by the structural coefficient [
29]:
where
is the structural mass and
is the propellant mass.
As shown in [
29], this coefficient measures the vehicle designer’s skill and evolved over time for different launchers. Thus, if for the stages of the Soyuz launcher, the structural coefficient is around 9% for Falcon 1, it becomes 6%, and for Falcon 9, it becomes 3%, which shows the technological evolution of the launchers. In order to have a realistic model for LTV, we will consider a structural coefficient of 30%, which is much oversized and will allow the introduction of additional control and testing elements, specific to a test vehicle, into the structural mass.
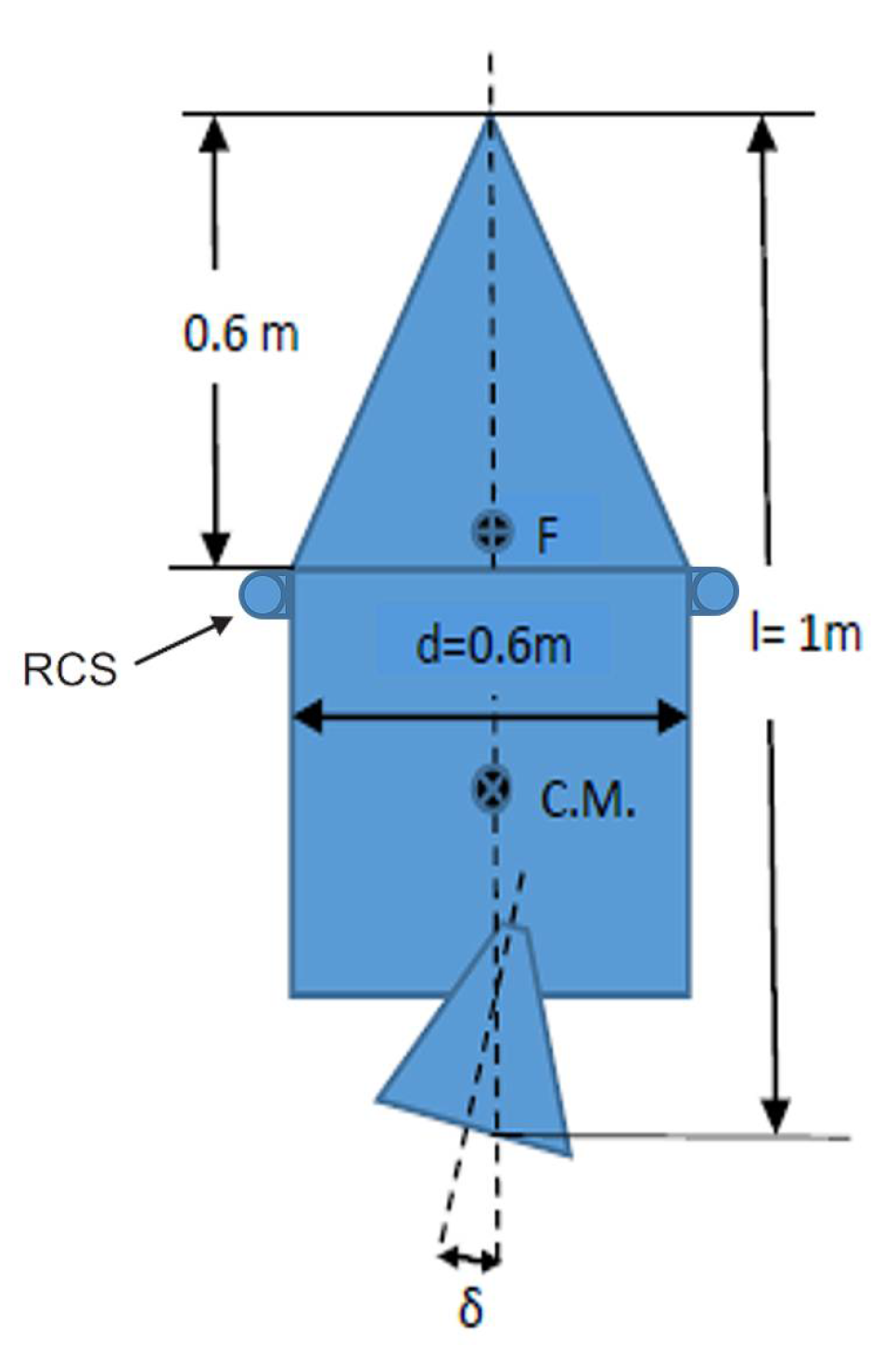
Based on the previous statements, we will consider a hypothetical LTV with an initial mass of 100 kg, from which propellant is 70 kg, equipped with a liquid rocket engine with a specific impulse , specific for the regular liquid engine (Kerosene + LOX), with maximum thrust and reactive force of one RCS element .
The vehicle has the shape and the dimension presented in
Figure 6.
From a dimensional point of view, we can check if the volume of the imposed fuel is compatible with the dimensions indicated in
Figure 6.
For this, we start from the density of LOX of 1141 kg/m
3 and Kerosene of 825 kg/m
3. Considering the LOX/Kerosene mixture ratio = 2.72, we obtain an average propellant density of 1056 kg/m
3, which for a mass of 70 kg leads to a hypothetical spherical tank with a radius of 0.25 m, a size compatible with the geometric dimensions of the vehicle indicated in
Figure 6.
For the considered configuration, the reference length is reference surface and the position of aerodynamic focus is .
- (a)
Mechanical data
For mechanical data, we will consider two cases. The first will be the LTV at the start, with full fuel, and the second at the end of evolution, without fuel. Because the fuel consumption defined through Equation (7) depends on flight conditions, the intermediate values of the other mechanical data will be obtained through interpolation as a function of LTV mass. The mechanical characteristics of LTV are shown in
Table 12.
- (b)
Time constants and controller gains
The time constants for actuators are: ; ; ; and the gains used in control signals are: ;;; ; ;; ; ; Model parameters defined will be used for the development of subsequent applications. For the evaluation of the guidance precision, an uncertainty of these parameters will be considered, which will lead to a dispersion of the evaluated trajectories, including the impact point.
5.2. Flight Scenarios
Although in some papers [
12,
13], the optimal trajectories for reaching a desired final position are analyzed, in the initial phase of LTV testing, it is necessary to define some simple trajectories to verify the vehicle’s controllability as its field of use by defining the flight envelope.
For this purpose, we will further define two flight scenarios, one vertical ascent/descent type, and the second having a horizontal evolution interspersed between the vertical evolutions of ascent/descent.
In the first scenario, LTV starts at an altitude , with an initial velocity and initial pitch angle: . Next, the ascending phase follows, which lasts until LTV achieves the desired altitude evolving at an imposed pitch angle and imposed ascensional velocity . After ascending phase, the descending phase follows with imposed pitch angle , evolution being vertical with descending constant velocity which lasts until it reaches the breaking altitude . After braking occurs, and the speed decreases until ensuring a smooth landing for the LTV.
In the second scenario, LTV starts at an altitude , with an initial velocity and initial pitch angle: . Next, the ascending phase follows, which lasts until LTV achieves the desired altitude evolving at an imposed pitch angle and imposed ascensional velocity . After the ascending phase, the horizontal phase follows at an imposed altitude , with until LTV achieves the desired abscissa , with imposed velocity . After the horizontal phase, the descending phase follows with imposed pitch angle , evolution being vertical with descending constant velocity which lasts until it reaches the breaking altitude . After braking occurs, and the speed decreases until ensuring a smooth landing for the LTV.
To synthesize the flight evaluation, we chose to have the same module of velocity in the entire flight evolution, except for the breaking phase when the value is The value of flight velocity will be particularized for the test case.
5.3. Results
- (a)
First test case
In order to exemplify the first scenario, we will consider an evolution with
, with the desired altitude
.
Figure 7 presents the vertical trajectory obtained by LTV for this first test case. The trajectory contains two flight phases: ascending phase and descending phase.
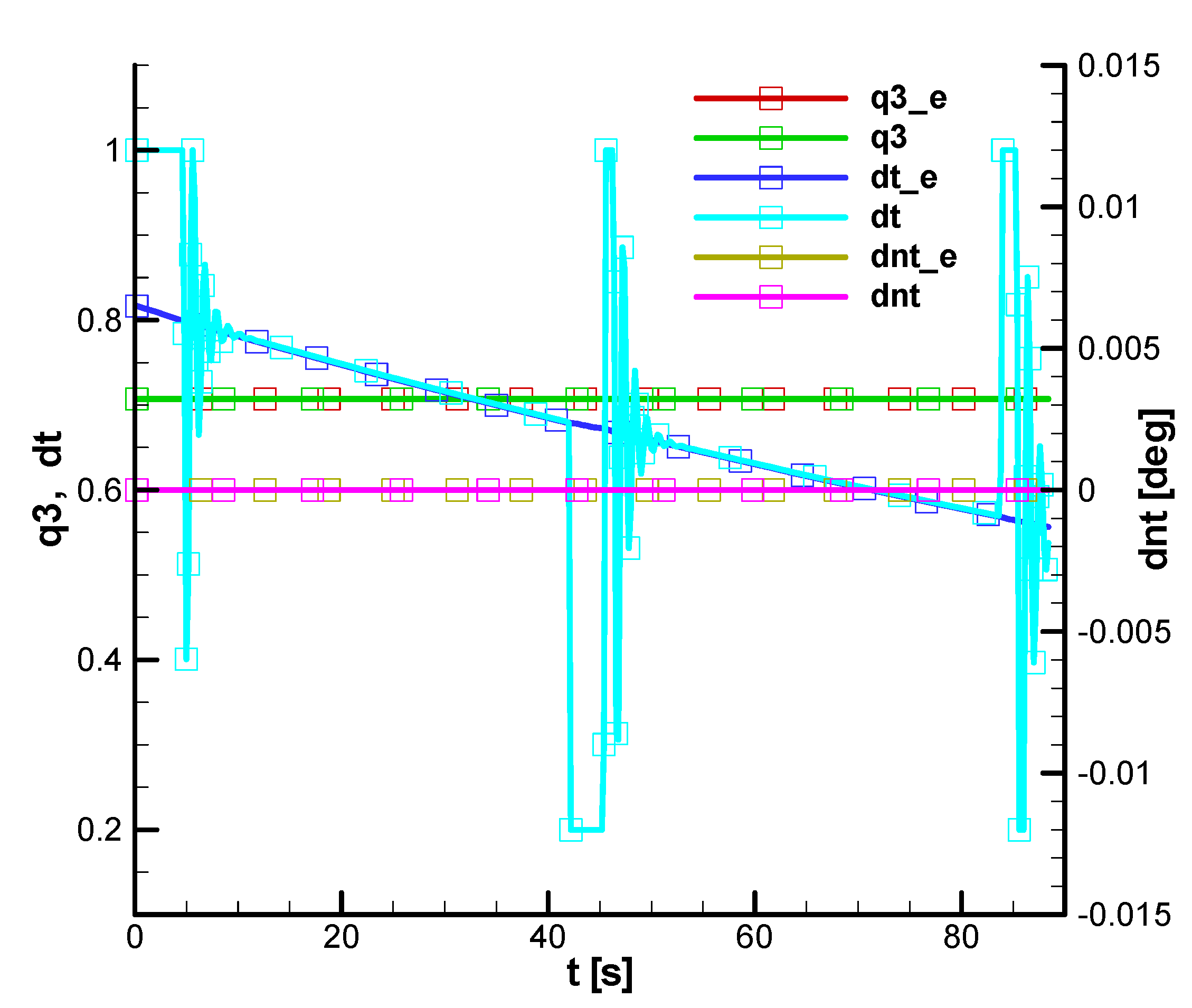
Figure 8 shows the equilibrium solutions of Equations (40) and (41) (
q3_e, dt_e, dnt_e) compared to the solutions obtained through differential equations integration for the 6DOF model in the first scenario (
q3, dt, dnt).
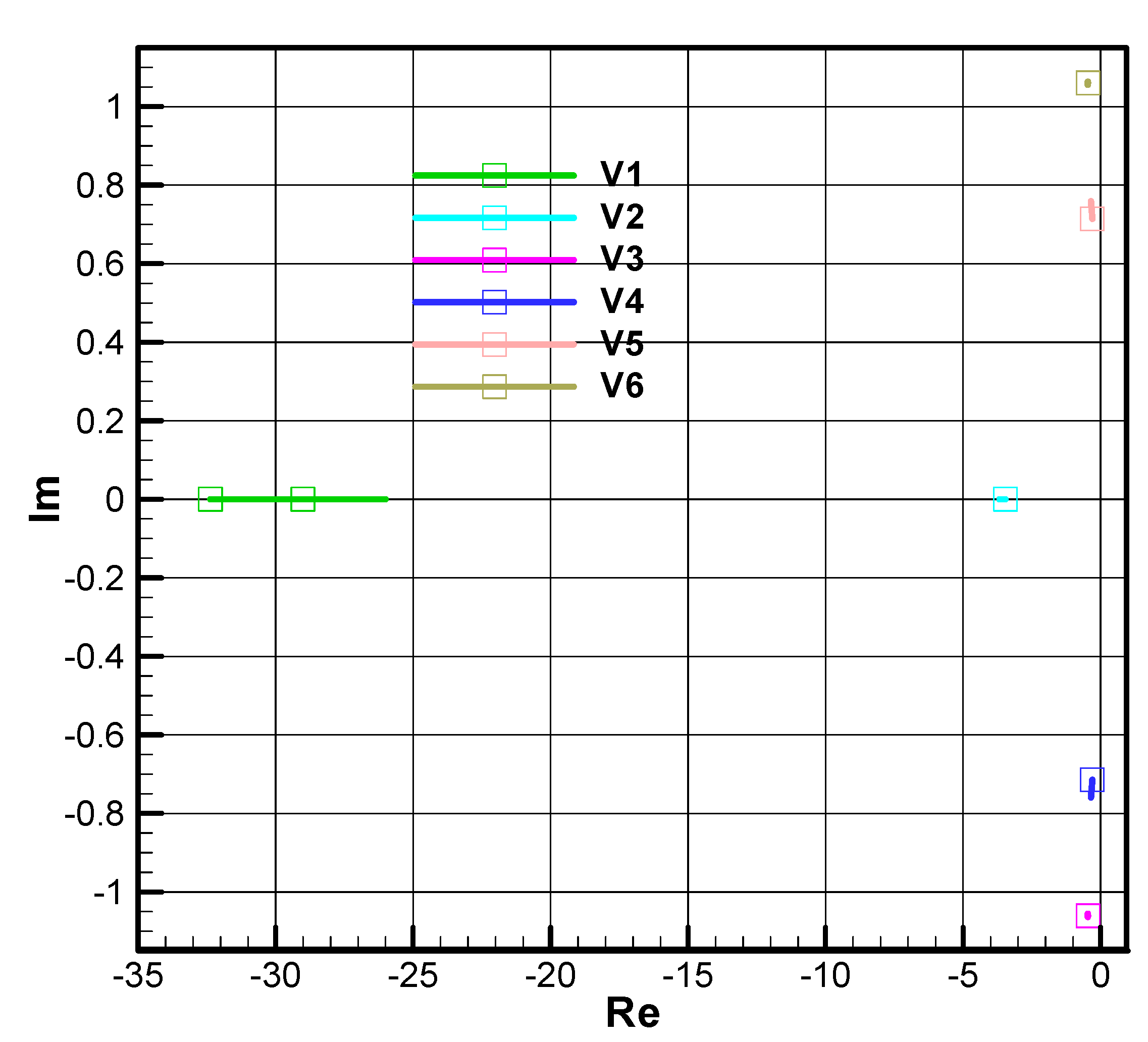
Figure 9 shows eigenvalues of the stability matrix
for longitudinal motion in ascending/descending evolution corresponding to
Table 3. We can observe a pair of complex eigenvalues with real part positive due to static instability (position aerodynamics focus in front of the mass center). The variation of the eigenvalues corresponds with the variation of the flight parameters in the first scenario.
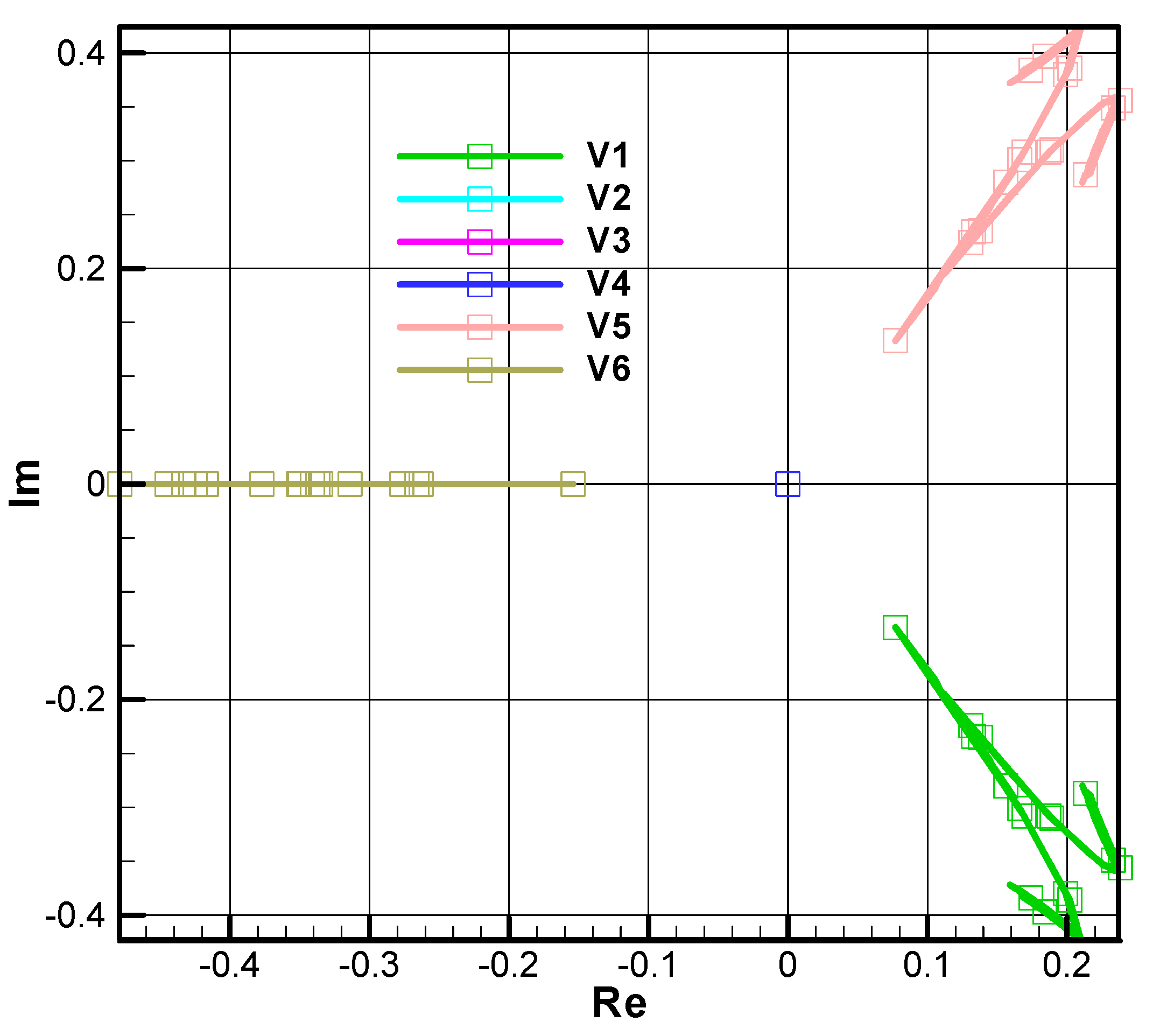
Figure 10 shows the eigenvalues of the regulated matrix
for longitudinal motion in ascending/descending evolution. Considering the variation of the eigenvalues for the open loop system in
Figure 9, one can observe that the real part of all eigenvalues for the closed-loop system is negative, resulting in stability for the first scenario evolution.
Figure 11 shows the eigenvalues of the stability matrix
for the uncontrolled lateral motion corresponding to
Table 7. We can observe a pair of complex eigenvalues with real part positive due to static instability (position aerodynamics focus in front of the mass center). The variation of the eigenvalues corresponds to the variation of the flight parameters in the first scenario. Due to the symmetry of the configuration and evolution, the shown eigenvalues of the stability matrix
for the lateral motion correspond to the eigenvalues of the stability matrix
for longitudinal motion presented in
Figure 9. The difference consists in the number of eigenvalues. For lateral motion, we have six values; for longitudinal, we only have five values.
Figure 12 shows eigenvalues of the regulated matrix
for lateral motion in all evolutions. One can observe that the real part of all eigenvalues has real negative parts, implying the stability of this evolution. Due to the symmetry of the configuration and evolution, the shown eigenvalues of the regulated matrix
for lateral motion correspond to the eigenvalues of the regulated matrix
for longitudinal motion presented in
Figure 10. The difference consists in the number of the eigenvalues. For lateral motion, there are six values, while for longitudinal only five.
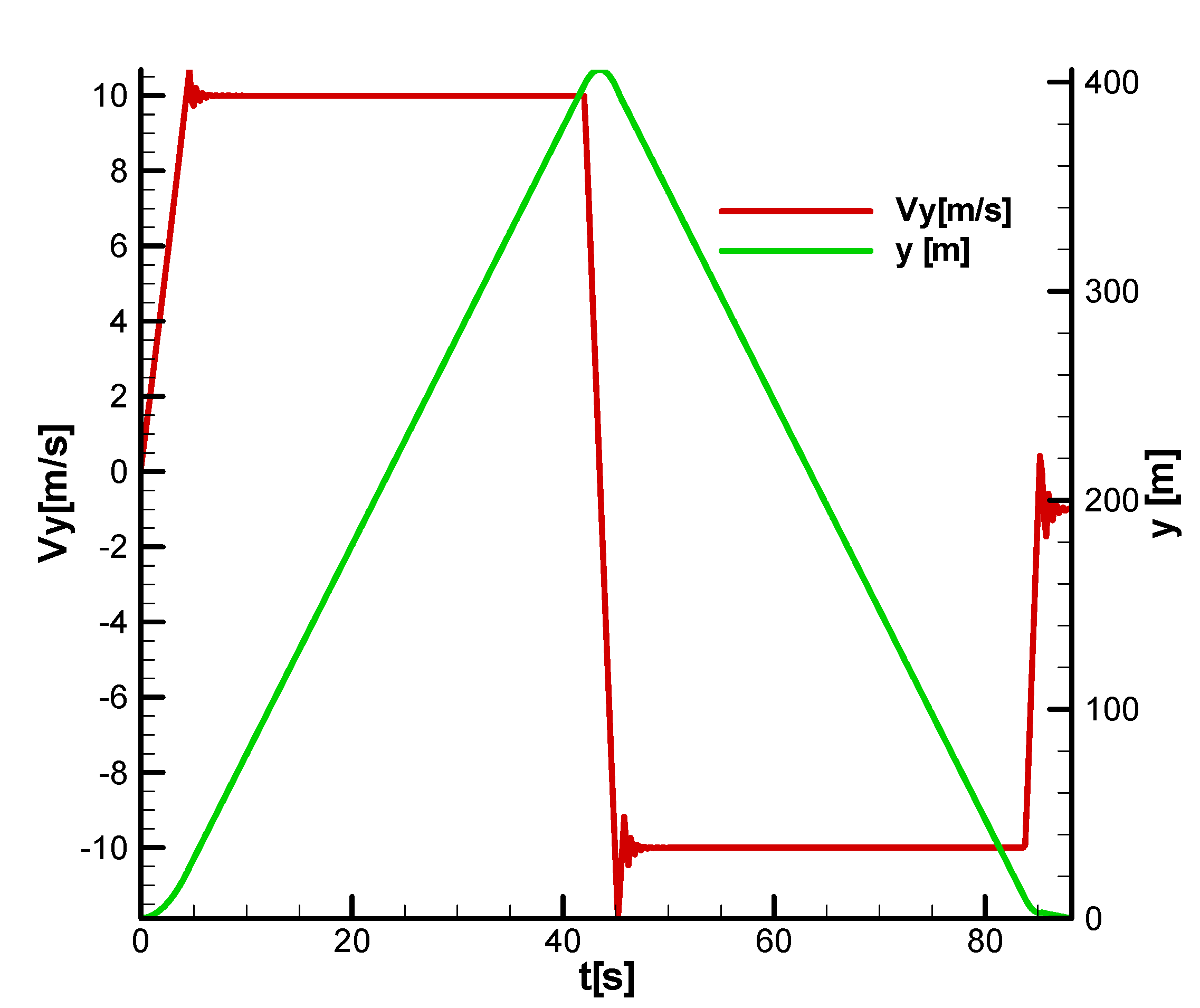
From
Figure 13, we can observe that vertical velocity
increases during ascending phase to 10 m/s and becomes negative (−10 m/s) during the descending phase and finally has the value of −1 m/s during the breaking phase. Moreover, we can observe the vertical coordinate
that increases from 0.1 m to 400 m and then decreases to zero.
From
Figure 14, we observe that the thrust throttling command
dT decreases during ascending and descending phases, following the corresponding decrease in LTV mass. The command reaches peak values during transition phases.
In terms of lateral and rolling movement, the values of states and commands are null during all flight phases.
The lateral and roll channels have no state or command variations (their derivatives remain null) during the first flight scenario.
- (b)
Second test case
In order to exemplify the second scenario, we will consider an evolution with , at altitude with the imposed distance of the horizontal flight .
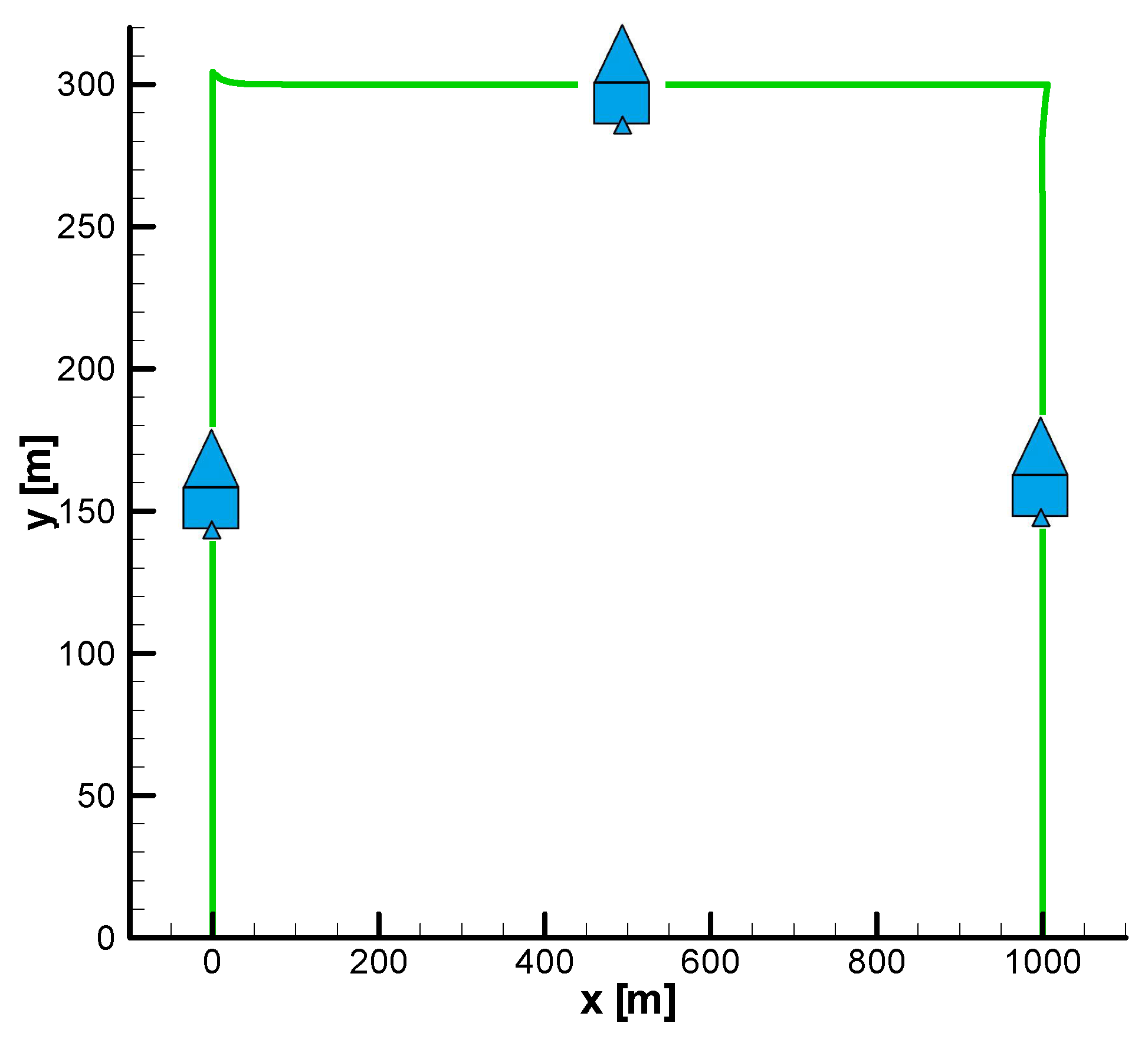
Figure 15 presents the vertical trajectory obtained by LTV. We can observe three flight phases: ascending, horizontal, and descending. We can also observe that the flight attitude for LTV in all three phases is with the pitch angle close to 90 degrees (
) corresponding to the basic movement shown in
Figure 16.
Figure 16 shows the equilibrium solutions of Equations (40) and (41) (
q3_e, dt_e, dnt_e) compared to the solution obtained through the integration of differential equations for the 6 DOF model in the second scenario (
q3, dt, dnt).
Figure 17 shows eigenvalues of the stability matrix
for longitudinal motion in horizontal evolution corresponding to
Table 5. We can observe a pair of complex eigenvalues with real part positive due to static instability (position of the aerodynamics focus in front of the mass center). The variation of the eigenvalues corresponds to the variation of the flight parameters in horizontal evolution in the second scenario.
Figure 18 shows eigenvalues of the regulated matrix
for longitudinal motion during horizontal evolution. Taking into consideration the variation of the eigenvalues for the open loop system in
Figure 17, one can observe that the real part of all eigenvalues for the closed-loop system is negative, resulting in stability for the entire evolution for the second scenario.
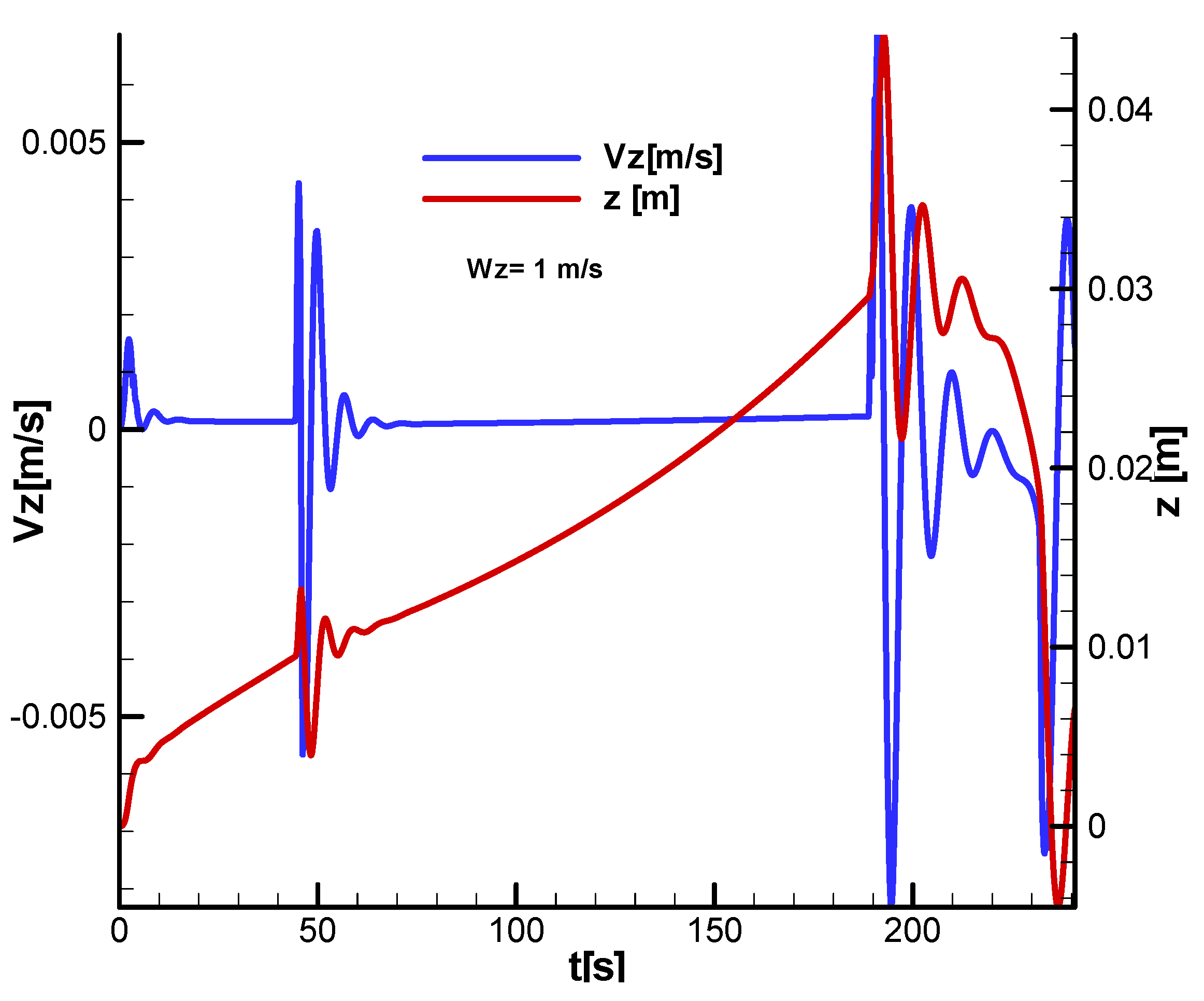
Figure 19 shows vertical velocity and vertical coordinate (altitude). We can observe that vertical velocity
increases during ascending phase until
and is null in horizontal evolution, then becomes negative
during the descending phase and finally has the value
during the breaking phase. Moreover, we can observe the vertical coordinate
that increases from 0.1 [m] to 300 [m] and decreases to zero.
From
Figure 20, we can observe that horizontal velocity
which is zero during the ascending phase, has a value of 7 [m/s] in horizontal evolution and then becomes zero during the descending and breaking phases. Moreover, we can observe the abscissa
that increases from 0 m until 1000 m.
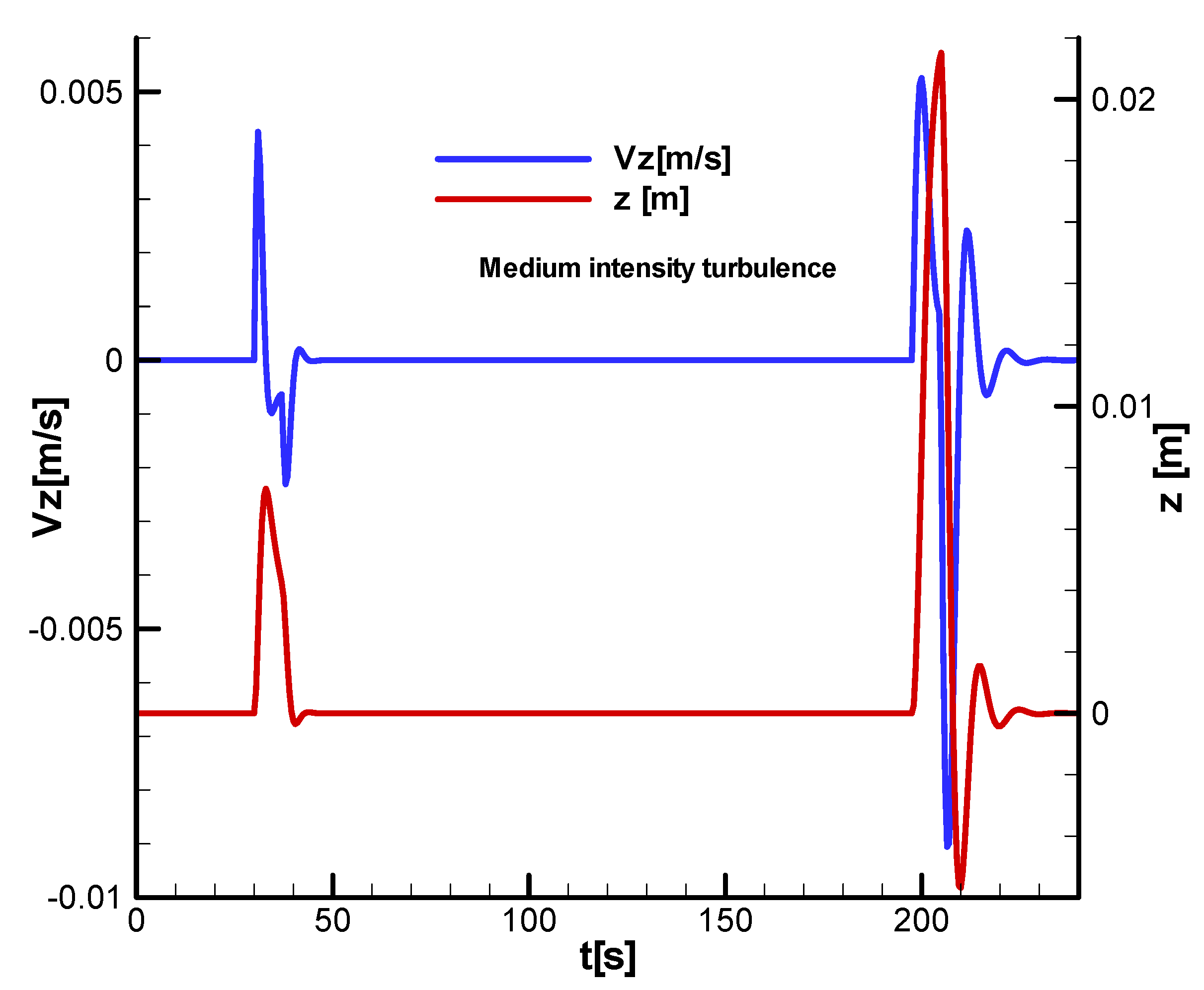
Figure 21 shows the velocity components in the local frame. We can observe that vertical velocity
increases during the ascending phase, null in the horizontal evolution and becomes negative during the descending phase. The horizontal velocity
is null during the ascending phase, becomes constant during the horizontal phase, and null during the descending phase.
Even though a quaternion approach is used in the 6DOF model, we prefer to present the results using Euler angles for a better understanding.
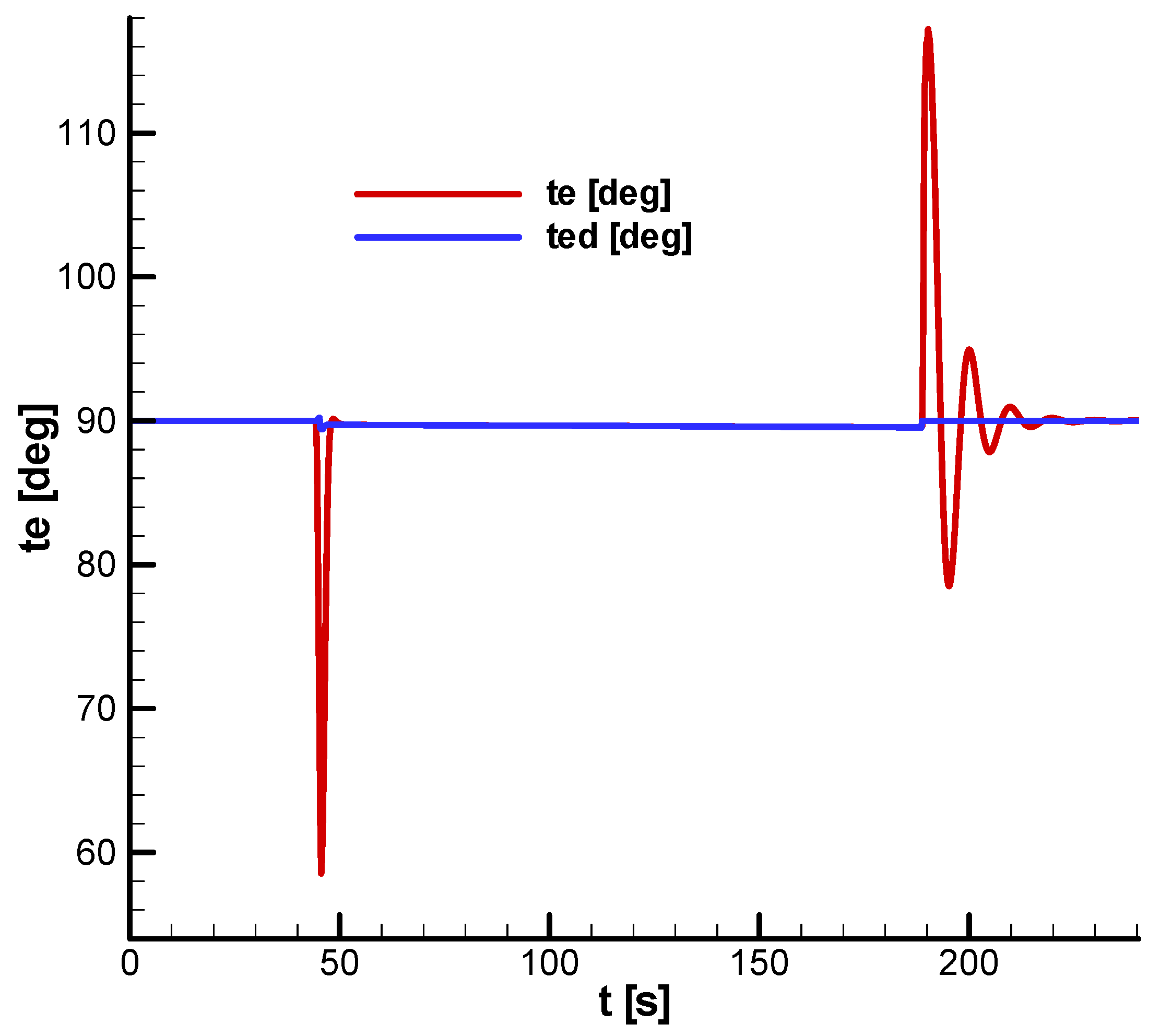
Figure 22 shows the desired pitch angle (
ted) and the achieved pitch angle (
te). We can observe that in ascending phase, the pitch angle has the value
, during horizontal evolution, follows the value of the equilibrium pitch angle, which becomes smaller while the mass decreases, and in descending phase, it takes the value
.
Figure 23 shows a detail of
Figure 22.
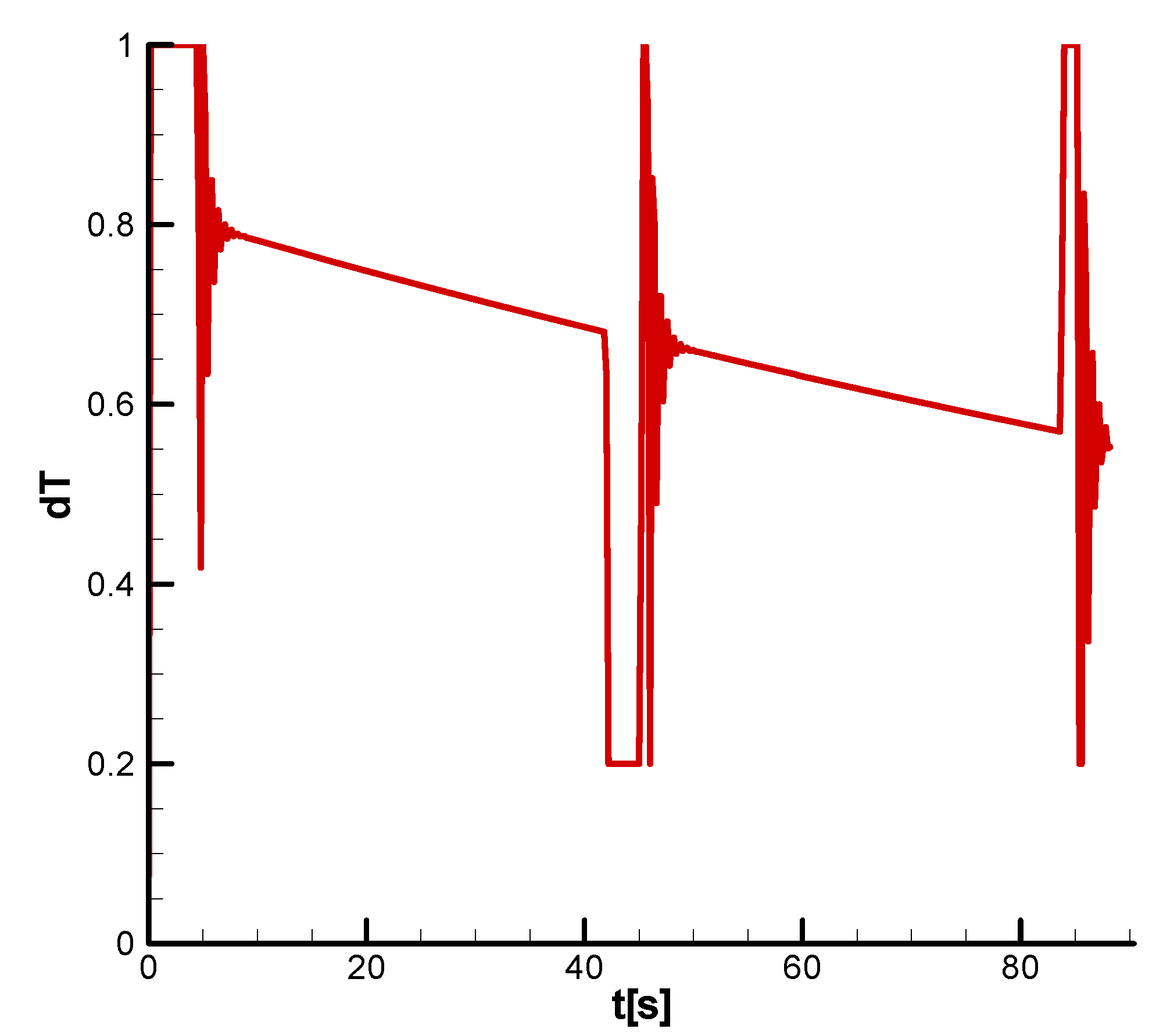
Figure 24 shows the longitudinal commands. We observe that thrust throttling command dT has maximum value during the ascending phase, after which it decreases continuously during horizontal and descending evolutions. Pitch deflection command dn is null during the ascending phase, becomes negative during horizontal evolution, and is null during descending evolution.
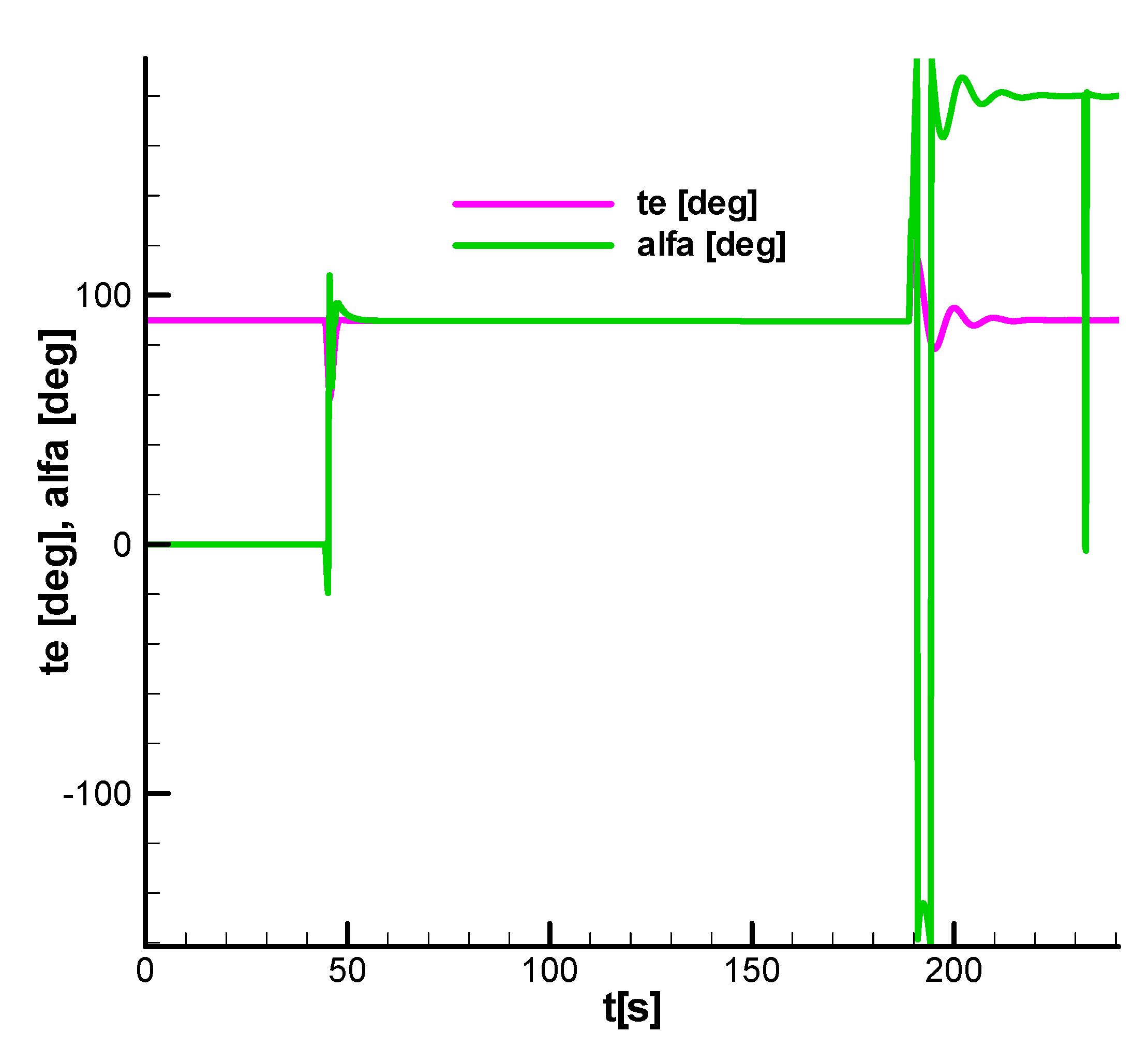
Figure 25 shows the incidence angle
alfa and the pitch angle
te. We can observe that incidence reaches the value of the pitch angle after the ascending phase, then maintains a value equal to the value of the pitch angle during horizontal evolution, and during the descending phase, it gets close to 180 degrees due to vertical descending evolution. The incidence angles and related pitch angle values prove that vehicle maintains a vertical attitude with the tip up in all flight phases.
In terms of lateral and roll motion, the values of states and commands are null during all the flight phases.
During the second flight scenario, the lateral and roll channels have no state or command variations (their derivatives remain null).
7. Conclusions
In order to build the equation of motion for the testing vehicle, we use two frames. The first one is the Local Frame/Start Frame, which allows us to write the translational equations; the second is the Body Frame, which allows us to write rotational dynamic equations. In order to correlate the model and the result of the testing vehicle with the model and results of the launcher, we use the Start Frame with the y-axis up and quaternion Hamilton. Further, we write the relations that describe the guidance command, which allows for building a 6DOF guided model. To complete the definition, aerodynamics, and thrust terms were introduced. Starting from the 6DOF nonlinear model, we obtained the basic movement, the linear form of the motion equation, and the stability and command matrices. From the analysis of the basic movement, it was found that for the technical solution adopted, the flight attitude is always vertical.
Figure 15 shows that it leads to horizontal evolution with a high incidence angle, close to 90 degrees. Using the model, two flight scenarios were evaluated. The first one contains only ascending and descending evolution, and the second contains three phases: ascending, horizontal, and descending. For each scenario, a flight case was defined and analyzed, and the flight envelope of the testing vehicle was defined. Supplementary, the influence of the uncertainty of the model parameters and sensor noise on trajectory dispersion was evaluated. Moreover, the influence of uniform wind and turbulence on lateral trajectory deviation was analyzed. The model developed must be improved by using experimental measurements of the dynamic regime’s aerodynamic terms and thrust characteristics. After completing ground measurements, the 6DOF model can be used for flight experiments design. In order to achieve the control system, it is necessary to use the inertial measurement unit (IMU) combined with GPS measurements to obtain information on the position, as well as the attitude and angular rate of the vehicle. The developed model for LTV, which is similar to the launcher model, can be used to validate the reusable launcher GNC in ascending/descending and horizontal flight phases.
In summary, the novelty element of the paper, and at the same time, the contributions in the field are:
- -
Building a complex computational model dedicated to the autonomous flight of the LTV;
- -
Defining the basic movement for the LTV and checking its concordance with the numerical solution obtained for autonomous flight
Figure 8 and
Figure 16;
- -
Obtaining the linear form of the equations of motion in the local frame with the exclusive use of the quaternion and the cross-check between the analytical and the numerical solution;
- -
Obtaining the linear form of the guidance relations and using them to build the regulator matrix in the required form;
- -
Methodology for evaluation of LTV performances using two flight scenarios.
The proposed model can be improved especially in the guidance part regarding the transition from one flight phase to another, where the state variables are observed in strong oscillations.







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}