
Orbital Stability and Invariant Manifolds on Distant Retrograde Orbits around Ganymede and Nearby Higher-Period Orbits


Abstract
:1. Introduction
2. Dynamical Model, Numerical Methods, and Dynamical Theories
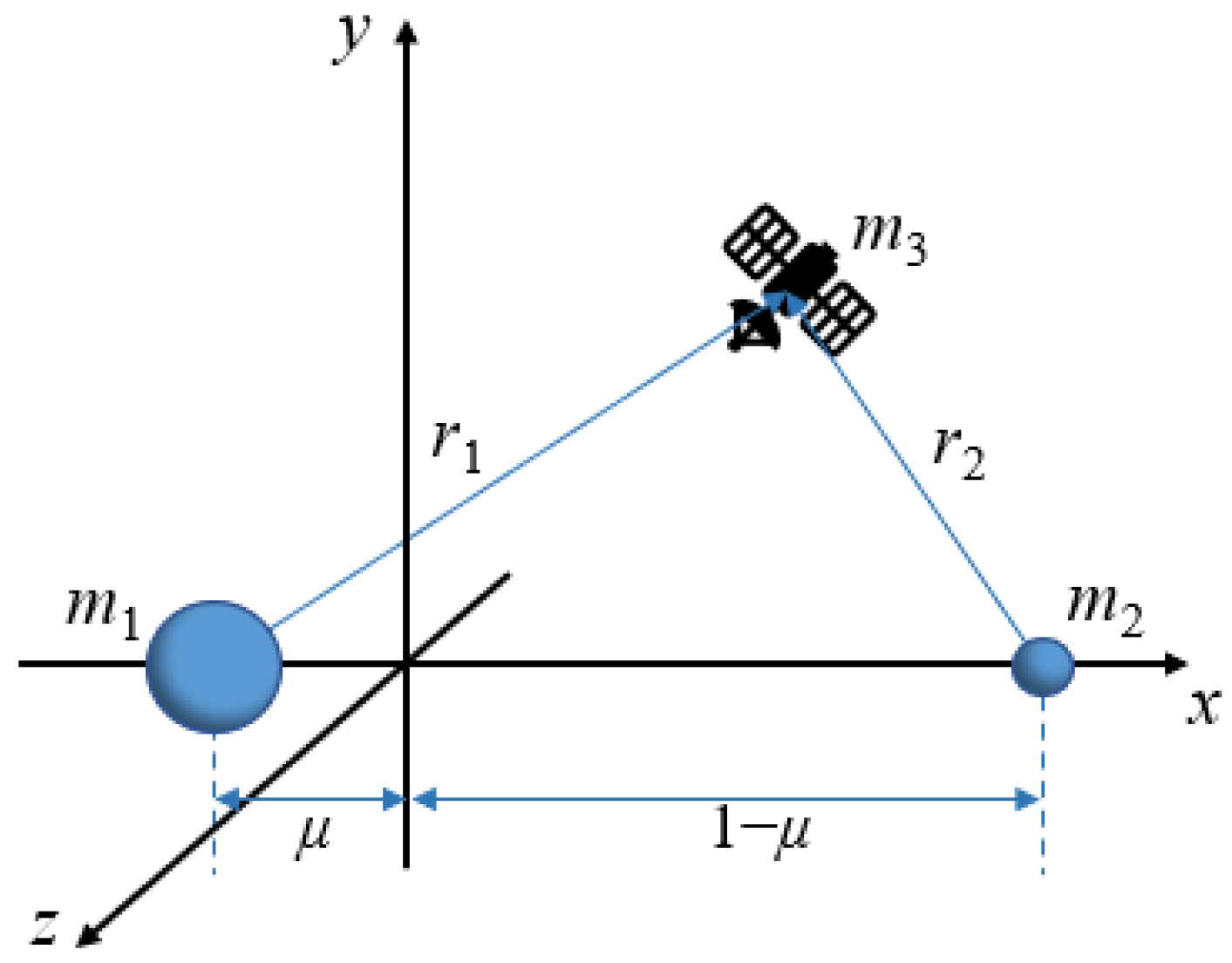
2.1. The Circular Restricted Three-Body Problem
2.2. Numerical Methods
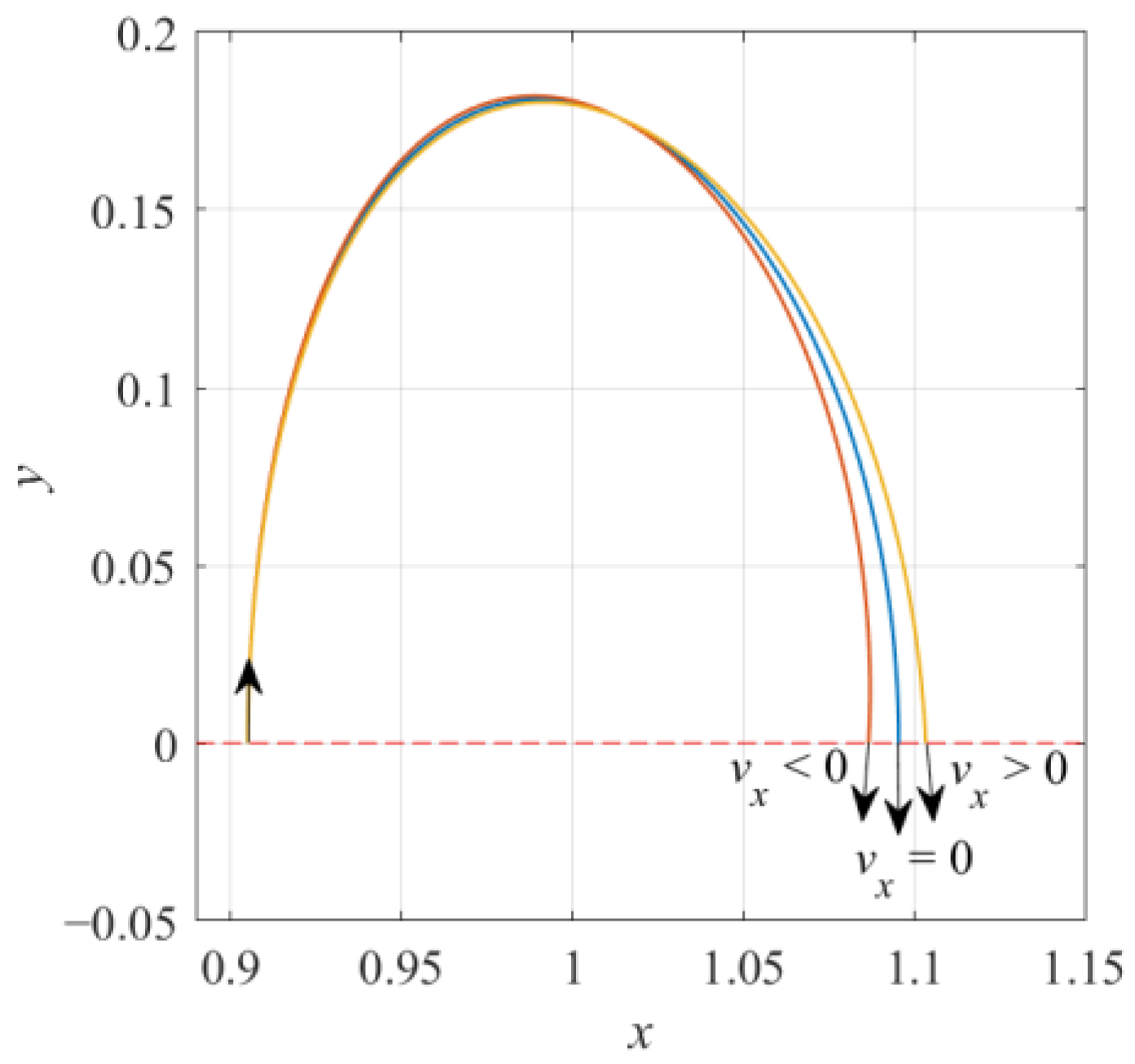
2.2.1. Dichotomy
2.2.2. Differential Correction
2.3. Orbital Stability
2.4. Bifurcations
2.5. Invariant Manifolds
3. The Ganymede DRO Family and Its Bifurcations
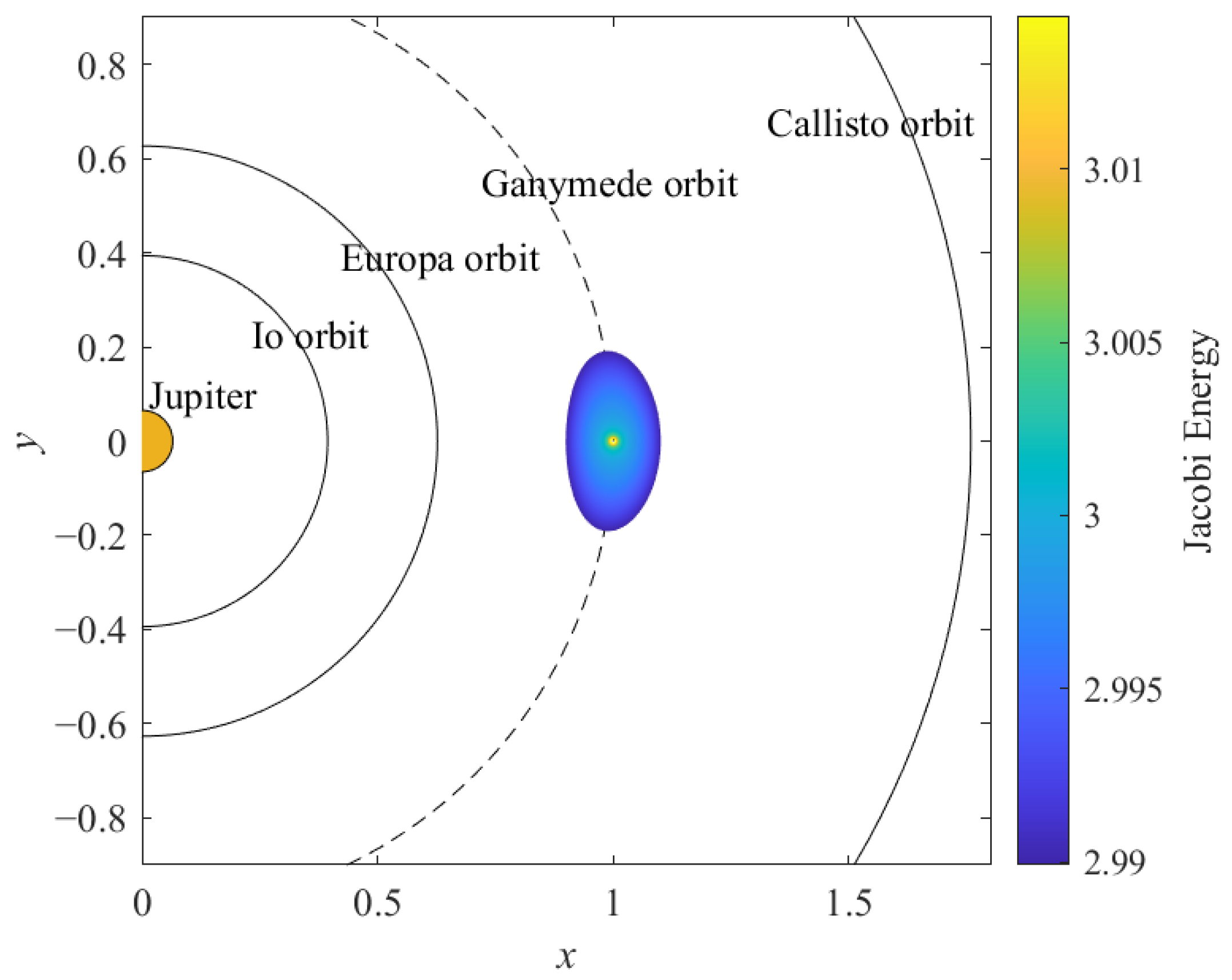
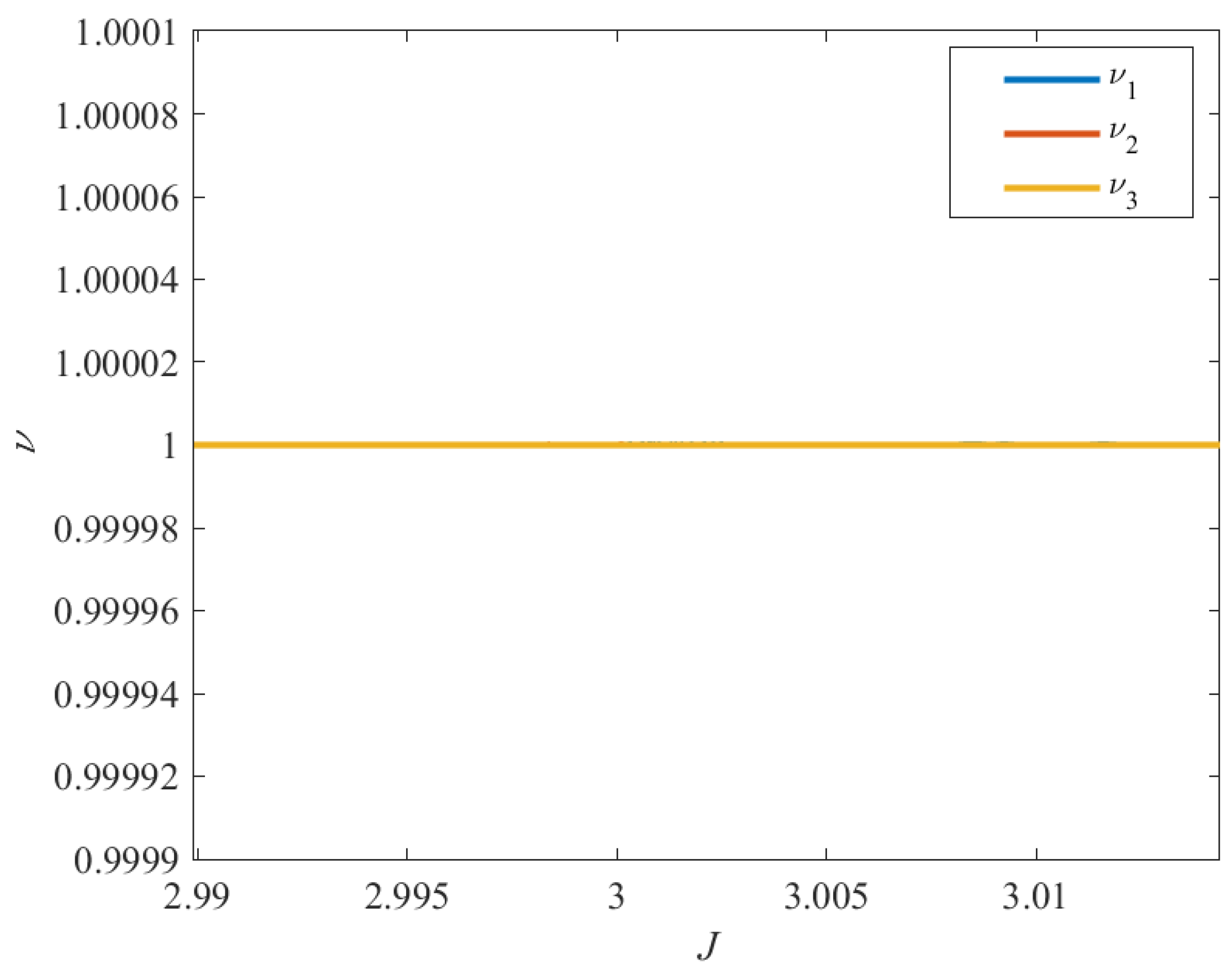
3.1. The DRO Family and Its Linear Stability
3.2. Bifurcations of DROs
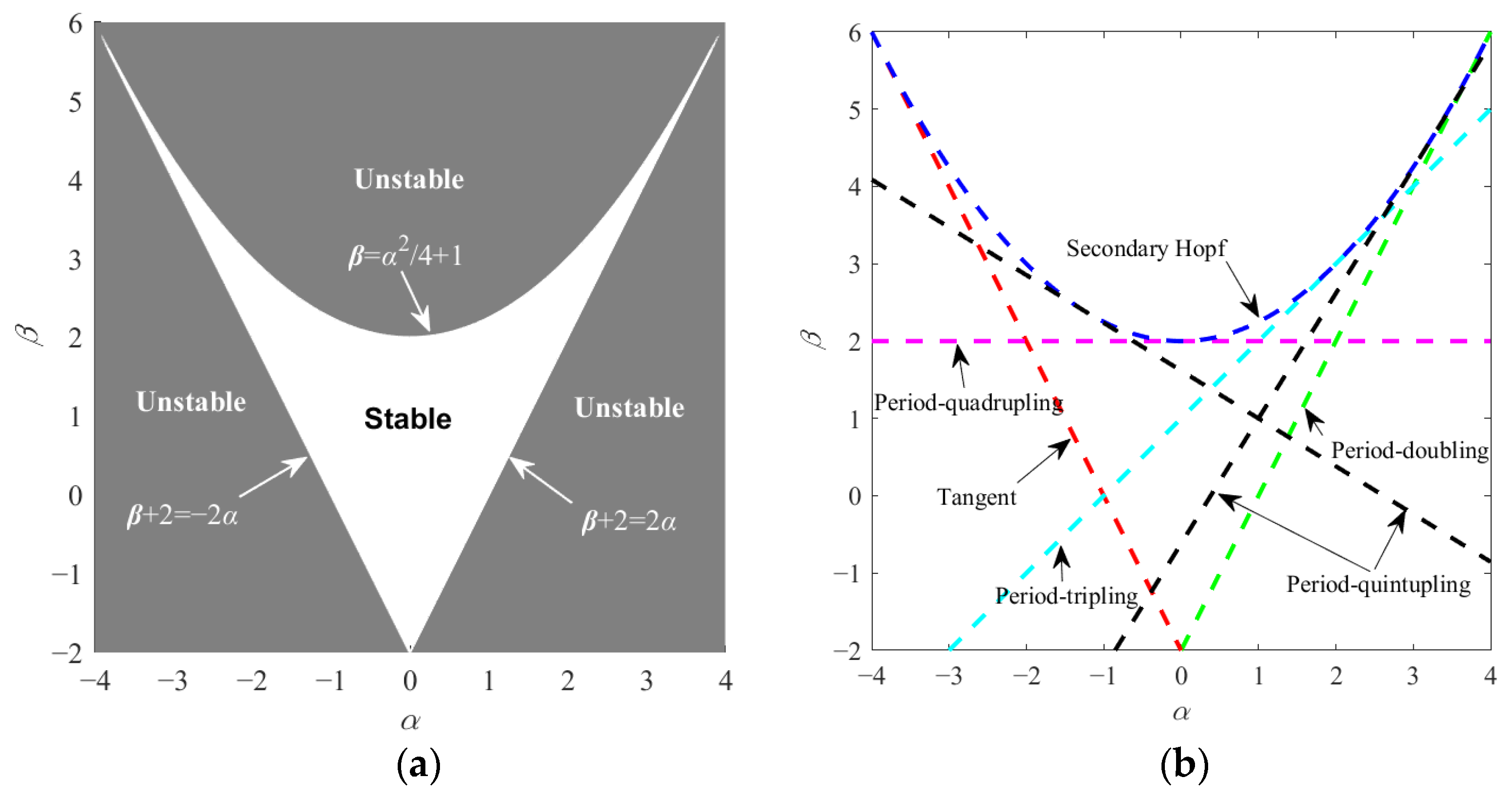
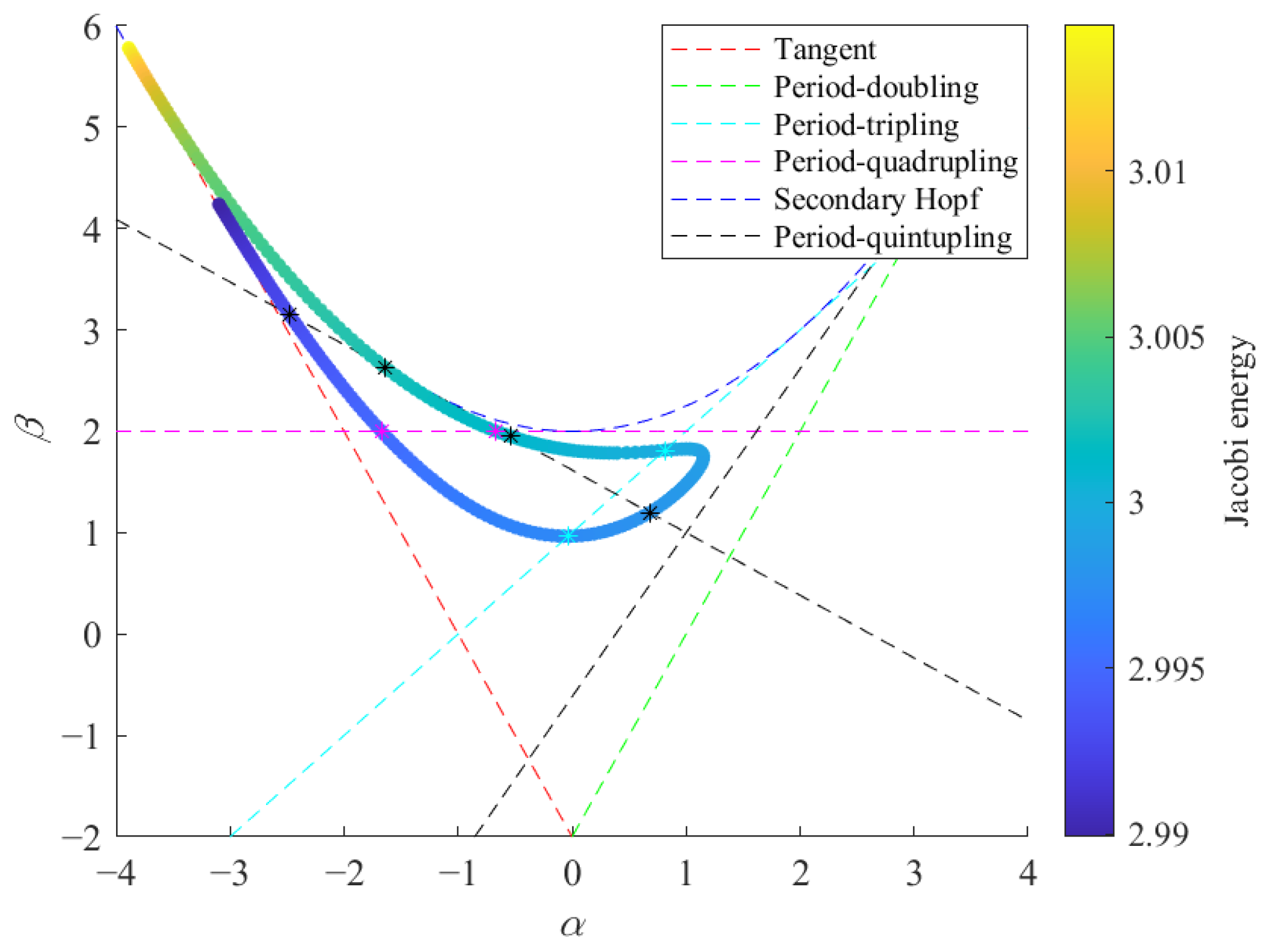
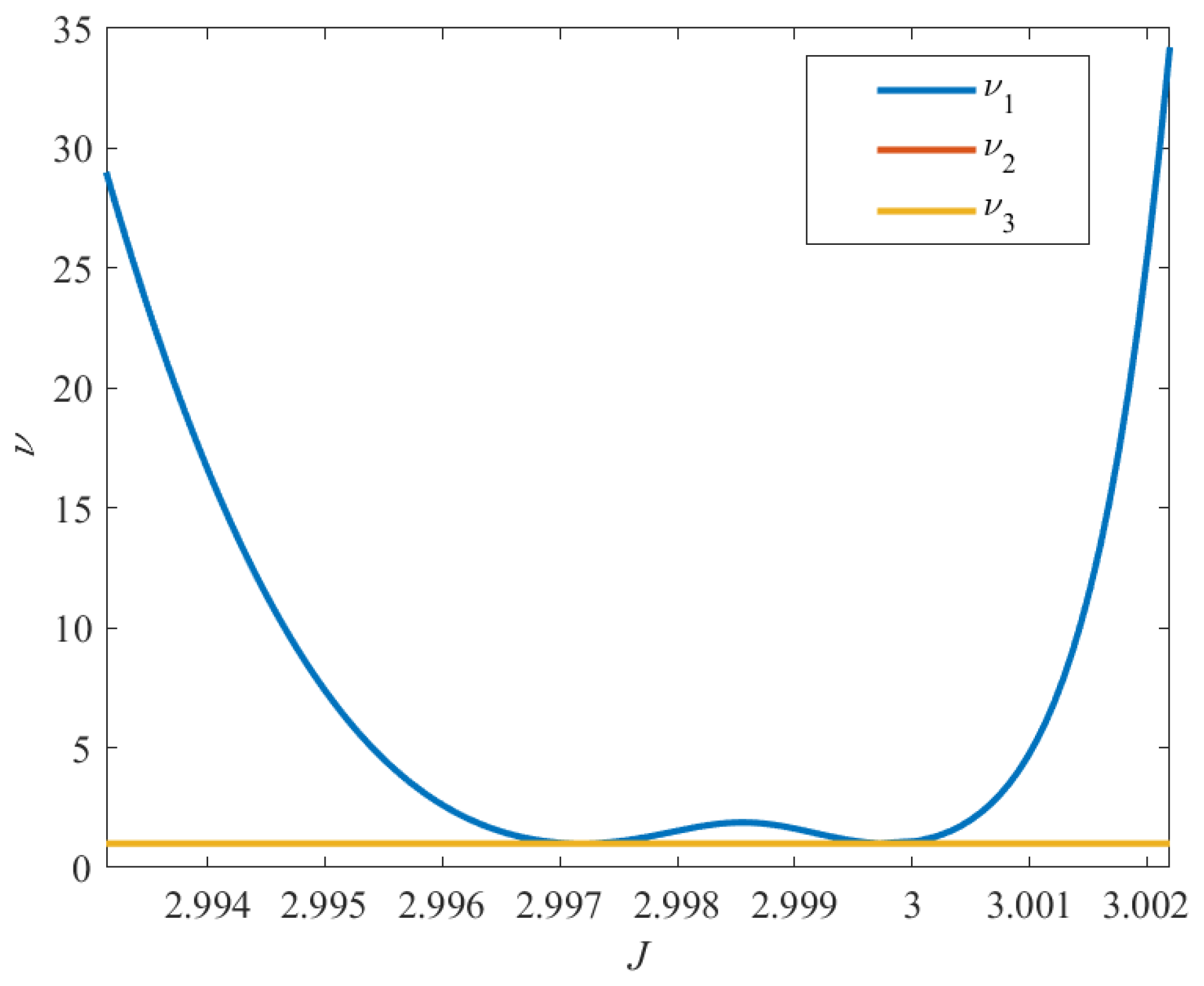
3.2.1. DRO Stability Diagram
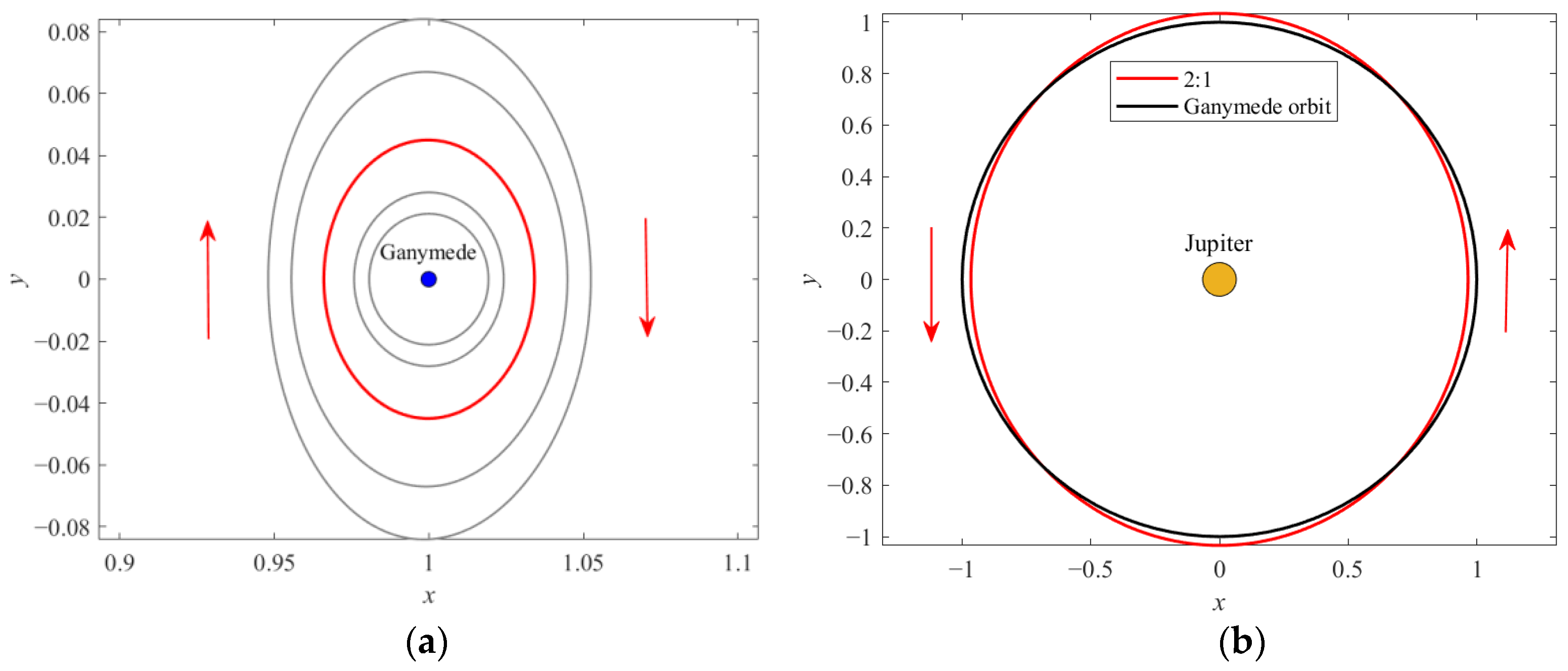
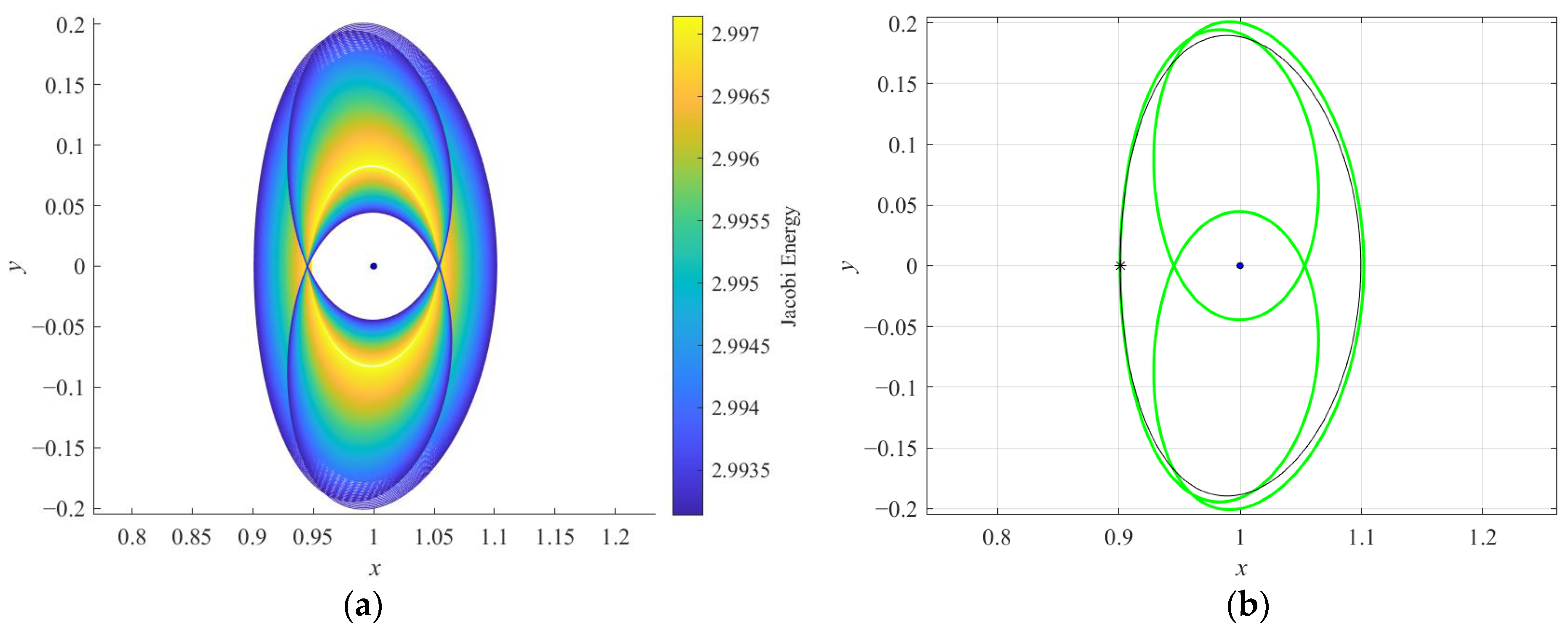
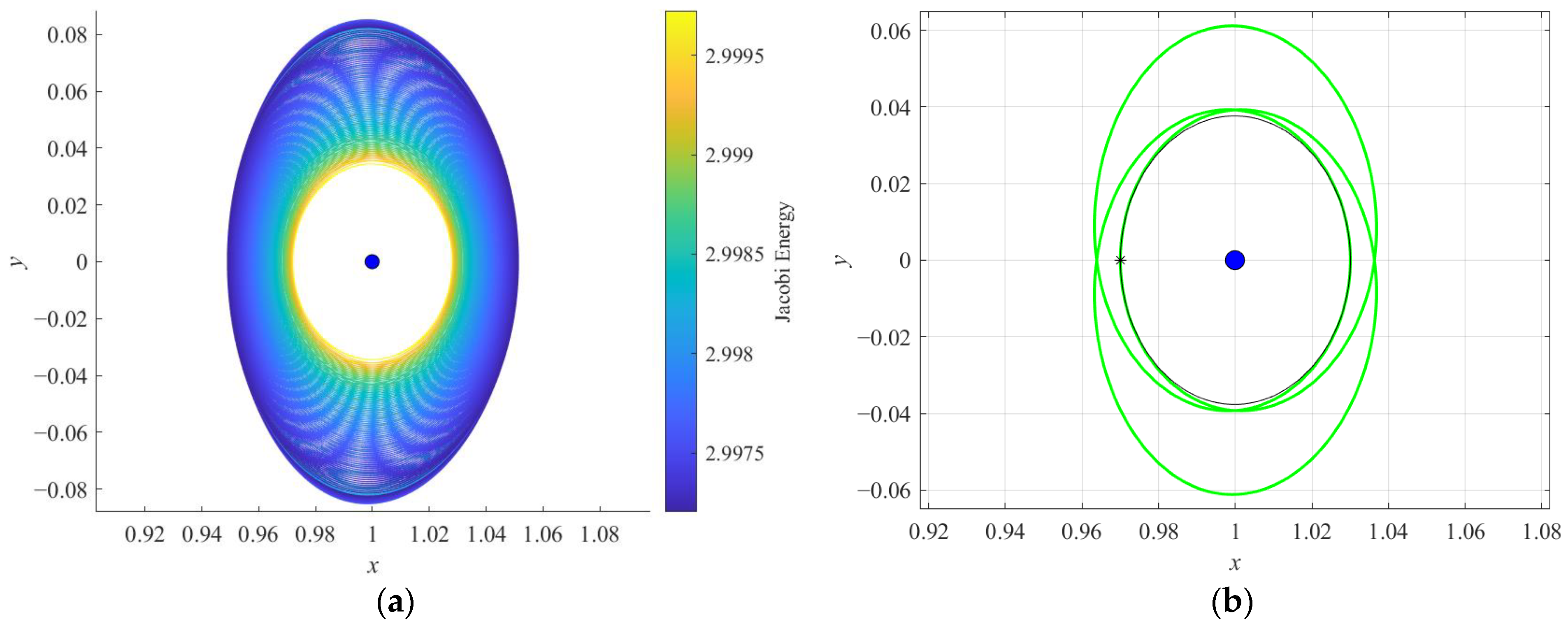
3.2.2. Period-Tripling Bifurcation
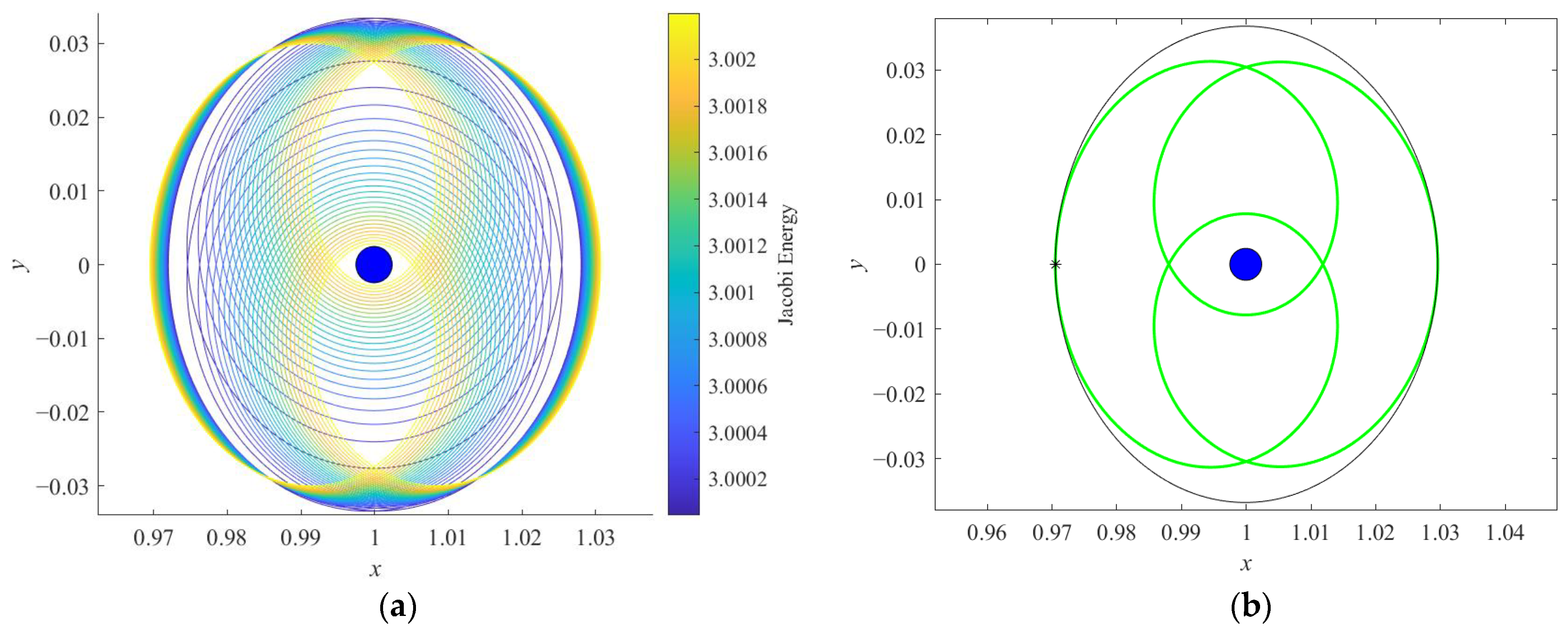
3.2.3. Period-Quadrupling Bifurcation
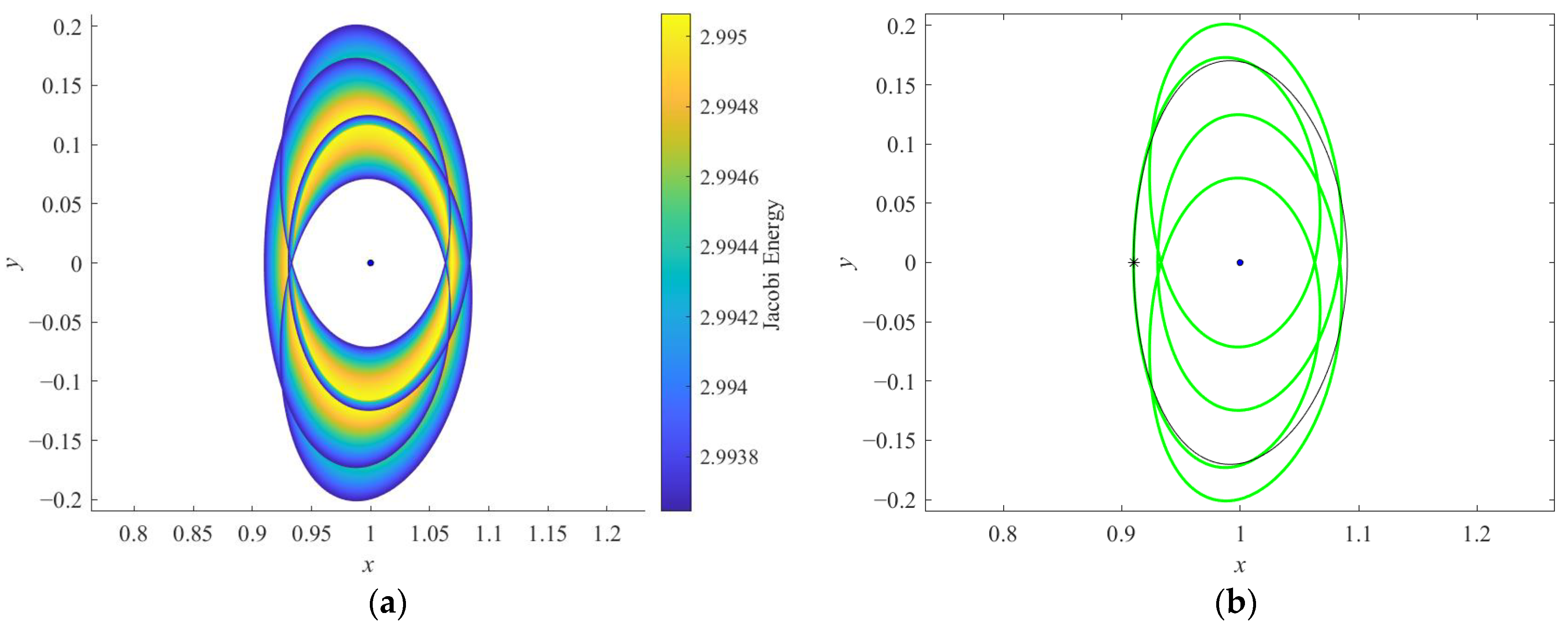
3.2.4. Period-Quintupling Bifurcation
3.3. Analysis of Perturbations
3.4. Manifold Structures
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hénon, M. Numerical Exploration of the Restricted Problem 5, Hill’s Case: Periodic Orbits and Their Stability. Astron. Astrophys. 1969, 1, 223–238. [Google Scholar]
- Brophy, J.R.; Friedman, L.; Culick, F. Asteroid Retrieval Feasibility. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–16. [Google Scholar]
- McGuire, M.L.; Strange, N.J.; Burke, L.M.; McCarty, S.L.; Lantoine, G.B.; Qu, M.; Shen, H.; Smith, D.A.; Vavrina, M.A. Overview of the Mission Design Reference Trajectory for NASA’s Asteroid Redirect Robotic Mission. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Stevenson, WA, USA, 23 October 2017. [Google Scholar]
- Howell, S.M.; Pappalardo, R.T. NASA’s Europa Clipper-a mission to a potentially habitable ocean world. Nat. Commun. 2020, 11, 1–4. [Google Scholar] [CrossRef] [PubMed]
- Grasset, O.; Dougherty, M.K.; Coustenis, A.; Bunce, E.J.; Erd, C.; Titov, D.; Blanc, M.; Coates, A.; Drossart, P.; Fletcher, L.N.; et al. jUpiter iCy moons Explorer (JUICE): An ESA mission to orbit Ganymede and to characterize the Jupiter system. Planet. Space Sci. 2013, 78, 1–21. [Google Scholar] [CrossRef]
- Kawakatsu, Y.; Kuramoto, K.; Ogawa, N.; Ikeda, H.; Mimasu, Y.; Ono, G.; Sawada, H.; Yoshikawa, K.; Imada, T.; Otake, H.; et al. Mission concept of Martian Moons eXploration (MMX). In Proceedings of the 68th International Astronautical Congress, Adelaide, Australia, 25–29 September 2017. [Google Scholar]
- Baresi, N.; Dell’Elce, L.; Cardoso dos Santos, J.; Yasuhiro, K. Orbit Maintenance of Quasi-Satellite Trajectories via Mean Relative Orbit Elements. In Proceedings of the 69th International Astronautical Congress, Bremen, Germany, 1–5 October 2018. [Google Scholar]
- Hénon, M. Numerical exploration of the restricted problem. vi. hill’s case: Non-periodic orbits. Astron. Astrophys. 1970, 9, 24–36. [Google Scholar]
- Broucke, R. Periodic Orbits in the Restricted Three-Body Problem with Earth-Moon Masses; NASA-JPL Technical Report; California Institute of Technology: Pasadena, CA, USA, 15 February 1968. [Google Scholar]
- Benest, D. Effects of the mass ratio on the existence of retrograde satellites in the circular plane restricted problem. Astron. Astrophys. 1974, 32, 39–46. [Google Scholar]
- Benest, D. Effects of the mass ratio on the existence of retrograde satellites in the circular plane restricted problem. II. Astron. Astrophys. 1975, 45, 353–363. [Google Scholar]
- Benest, D. Effects of the mass ratio on the existence of retrograde satellites in the circular plane restricted problem. III. Astron. Astrophys. 1976, 53, 231–236. [Google Scholar]
- Hénon, M. Vertical Stability of Periodic Orbits in the Restricted Problem. I. Equal Masses. Astron. Astrophys. 1973, 28, 415–426. [Google Scholar]
- Hénon, M. Vertical Stability of Periodic Orbits in the Restricted Problem. II. Hill’s Case. Astron. Astrophys. 1974, 30, 317–321. [Google Scholar]
- Bezrouk, C.J.; Parker, J. Long Duration Stability of Distant Retrograde Orbits. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, San Diego, CA, USA, 4–7 August 2014. [Google Scholar]
- Bezrouk, C.J.; Parker, J. Long term evolution of distant retrograde orbits in the Earth-Moon system. Astrophys. Space Sci. 2017, 362, 176–186. [Google Scholar] [CrossRef]
- Lara, M. Nonlinear librations of distant retrograde orbits: A perturbative approach—The Hill problem case. Nonlinear Dyn. 2018, 93, 2019–2038. [Google Scholar] [CrossRef]
- Welch, C.M.; Parker, J.S.; Buxton, C. Mission considerations for direct transfers to a distant retrograde orbit. J. Astronaut. Sci. 2015, 62, 101–124. [Google Scholar] [CrossRef]
- Demeyer, J.; Gurfil, P. Transfer to Distant Retrograde Orbits Using Manifold Theory. J. Guid. Control. Dyn. 2007, 30, 1261–1267. [Google Scholar] [CrossRef]
- Perozzi, E.; Ceccaroni, M.; Valsecchi, G.B.; Rossi, A. Distant retrograde orbits and the asteroid hazard. Eur. Phys. J. Plus 2017, 132, 367–375. [Google Scholar] [CrossRef]
- Tan, M.; Zhang, K.; Wang, J. Strategies to capture asteroids to distant retrograde orbits in the Sun–Earth system. Acta Astronaut. 2021, 189, 181–195. [Google Scholar] [CrossRef]
- Lam, T.; Hirani, A.N.; Kangas, J.A. Characteristics of transfers to and captures at Europa. In Proceedings of the 16th AAS/AIAA Space Flight Mechanics Meeting, Tampa, FL, USA, 1 December 2006. [Google Scholar]
- Lam, T.; Whiffen, G.J. Exploration of distant retrograde orbits around Europa. Am. Astronaut. Soc. Pap. 2005, 120, 135–153. [Google Scholar]
- McCarthy, B.P.; Howell, K.C. Leveraging quasi-periodic orbits for trajectory design in cislunar space. Astrodynamics 2021, 5, 139–165. [Google Scholar] [CrossRef]
- Howell, K.C. Three-Dimensional, Periodic, ‘Halo’ Orbits. Celest. Mech. 1984, 32, 53–71. [Google Scholar] [CrossRef]
- Roy, A.E.; Ovenden, M.W. On the Occurrence of Commensurable Mean Motions in the Solar System: The Mirror Theorem. Mon. Not. R. Astron. Soc. 1955, 115, 296–309. [Google Scholar] [CrossRef]
- Robin, I.A.; Markellos, V.V. Numerical determination of three-dimensional periodic orbits generated from vertical self-resonant satellite orbits. Celest. Mech. 1980, 21, 395–434. [Google Scholar] [CrossRef]
- Markellos, V.V. Bifurcations of planar to three-dimensional periodic orbits in the general three-body problem. Celest. Mech. 1981, 25, 3–31. [Google Scholar] [CrossRef]
- Papadakis, K.E.; Markellos, V.V. On basic families of three-dimensional periodic orbits of three massive bodies and their stability. Astrophys. Space Sci. 1992, 191, 223–229. [Google Scholar] [CrossRef]
- Russell, E.J. Global Search for Planar and Three-Dimensional Periodic Orbits near Europa. J. Astronaut. Sci. 2006, 54, 199–226. [Google Scholar] [CrossRef]
- Zimovan, E.M. Characteristics and Design Strategies for Near Rectilinear Halo Orbits Within the Earth-Moon System. Master’s Thesis, Purdue University, West Lafayette, IN, USA, August 2017; p. 171. [Google Scholar]
- Howell, K.; Campbell, E. Three-dimensional periodic solutions that bifurcate from halo families in the circular restricted three-body problem. Am. Astronaut. Soc. Pap. 1999, 102, 891–910. [Google Scholar]
- Zimovan-Spreen, E.M.; Howell, K.C.; Davis, D.C. Near rectilinear halo orbits and nearby higher-period dynamical structures: Orbital stability and resonance properties. Celest. Mech. Dyn. Astron. 2020, 132, 28–53. [Google Scholar] [CrossRef]
- Thomas, C.E.; Howell, K.C. Bifurcations from Families of Periodic Solutions in the Circular Restricted Problem with Application to Trajectory Design. Master’s Thesis, Purdue University, West Lafayette, IN, USA, 1999; p. 186. [Google Scholar]
- Broucke, R. Stability of periodic orbits in the elliptic, restricted three-body problem. AIAA J. 1969, 7, 1003–1009. [Google Scholar] [CrossRef]
- Capdevila, L.R.; Howell, K.C. A transfer network linking Earth, Moon, and the triangular libration point regions in the Earth-Moon system. Adv. Space Res. 2018, 62, 1826–1852. [Google Scholar] [CrossRef]
- Natasha, B.; Howell, K.C. Leveraging Natural Dynamical Structures to Explore Multi-Body Systems. Master’s Thesis, Purdue University, West Lafayette, IN, USA, 2016; p. 252. [Google Scholar]
- Cardoso dos Santos, J.; Carvalho, J.P.S.; Prado, A.F.B.A.; De Moraes, R.V. Searching for less perturbed elliptical orbits around Europa. J. Phys. Conf. Ser. 2015, 641, 012011. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bifurcation Type | Equation of Curve Representing Bifurcation |
|---|---|
| Tangent | β + 2 = −2α |
| Period-doubling | β + 2 = 2α |
| Period-tripling | β = α + 1 |
| Period-quadrupling | β = 2 |
| Period-quintupling | β = 1/(2cos(4π/5)) α − (cos(8π/5) + 1)/cos(4π/5) β = 1/(2cos(8π/5)) α − (cos(16π/5) + 1)/cos(8π/5) |
| Secondary Hopf | β = α2/4 + 1, −4 < α < 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Tao, Y.; Jiang, F. Orbital Stability and Invariant Manifolds on Distant Retrograde Orbits around Ganymede and Nearby Higher-Period Orbits. Aerospace 2022, 9, 454. https://doi.org/10.3390/aerospace9080454
Li Q, Tao Y, Jiang F. Orbital Stability and Invariant Manifolds on Distant Retrograde Orbits around Ganymede and Nearby Higher-Period Orbits. Aerospace. 2022; 9(8):454. https://doi.org/10.3390/aerospace9080454
Chicago/Turabian StyleLi, Qingqing, Yuming Tao, and Fanghua Jiang. 2022. "Orbital Stability and Invariant Manifolds on Distant Retrograde Orbits around Ganymede and Nearby Higher-Period Orbits" Aerospace 9, no. 8: 454. https://doi.org/10.3390/aerospace9080454