
High-Order CFD Solvers on Three-Dimensional Unstructured Meshes: Parallel Implementation of RKDG Method with WENO Limiter and Momentum Sources


Abstract
:1. Introduction
2. The RKDG Method with WENO Limiters and Momentum Sources
- Variables in the first column are called conservative variables;
- The density , the velocity components and the pressure p are called primitive variables;
- The thermodynamic quantities and are the specific total energy and the specific total enthalpy, respectively; for ideal gases, they can be written as functions of the five primitive variables:in which is the heat capacity ratio of the gas, and we use in this article;
- The body force components are assumed to be 0s, except in Section 3.3.
2.1. The DG Space Discretization
2.2. The RK Time Discretization
- first-order:
- second-order:
- third-order:
2.3. The Compact WENO Limiter
2.4. The Momentum Source Model
- c is the chord length of the piece, and s is the arc length parameter of the axis;
- is the angle of attack, which is related to u and w (velocity components resolved in the airfoil’s local frame) by ;
- and are the lift and drag coefficients of the airfoil, respectively;
- L and D are the lift and drag per unit length, respectively.
3. Results of Model Problems and Engineering Problems
3.1. Lower-Dimensional Model Problems
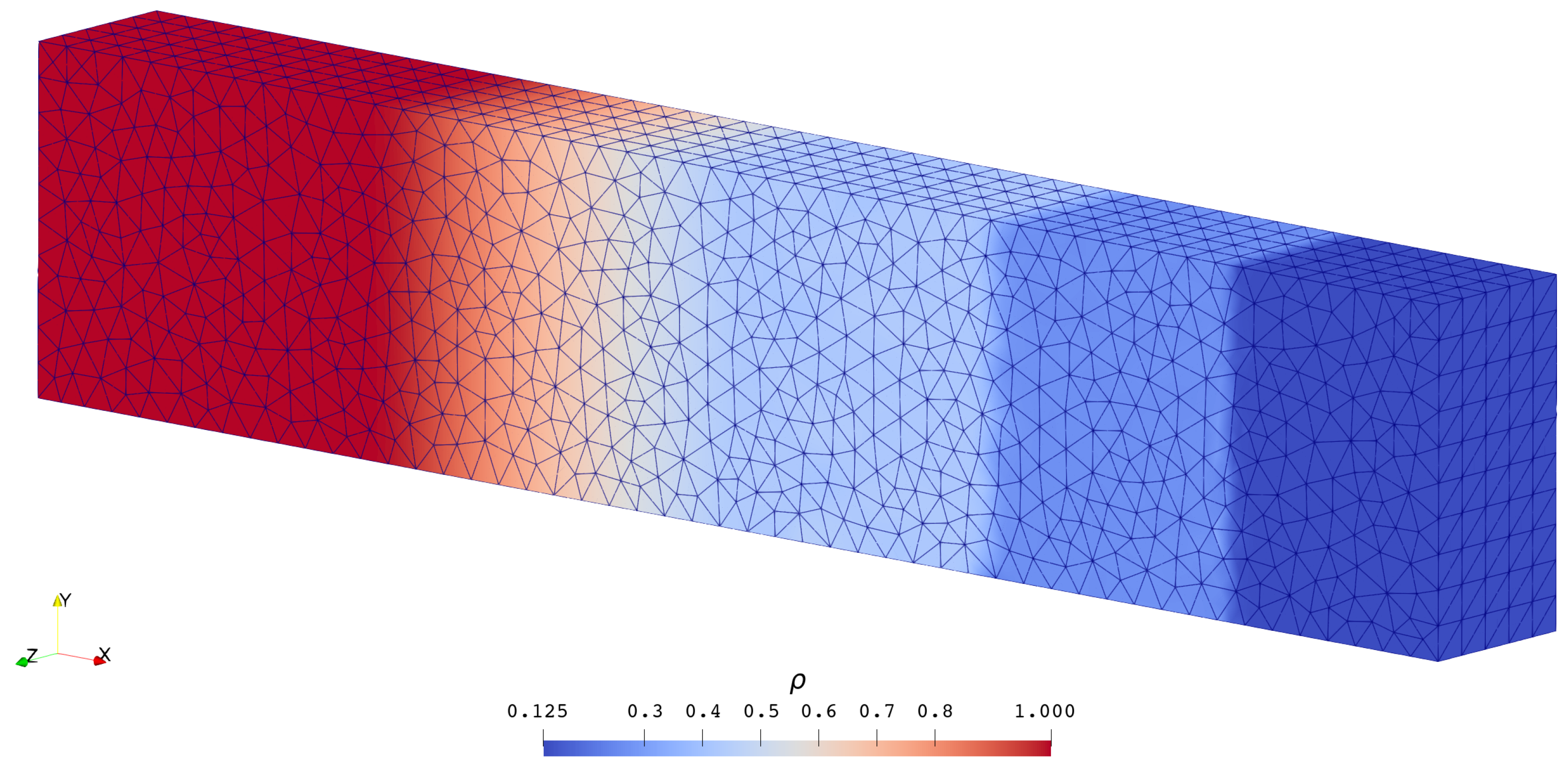
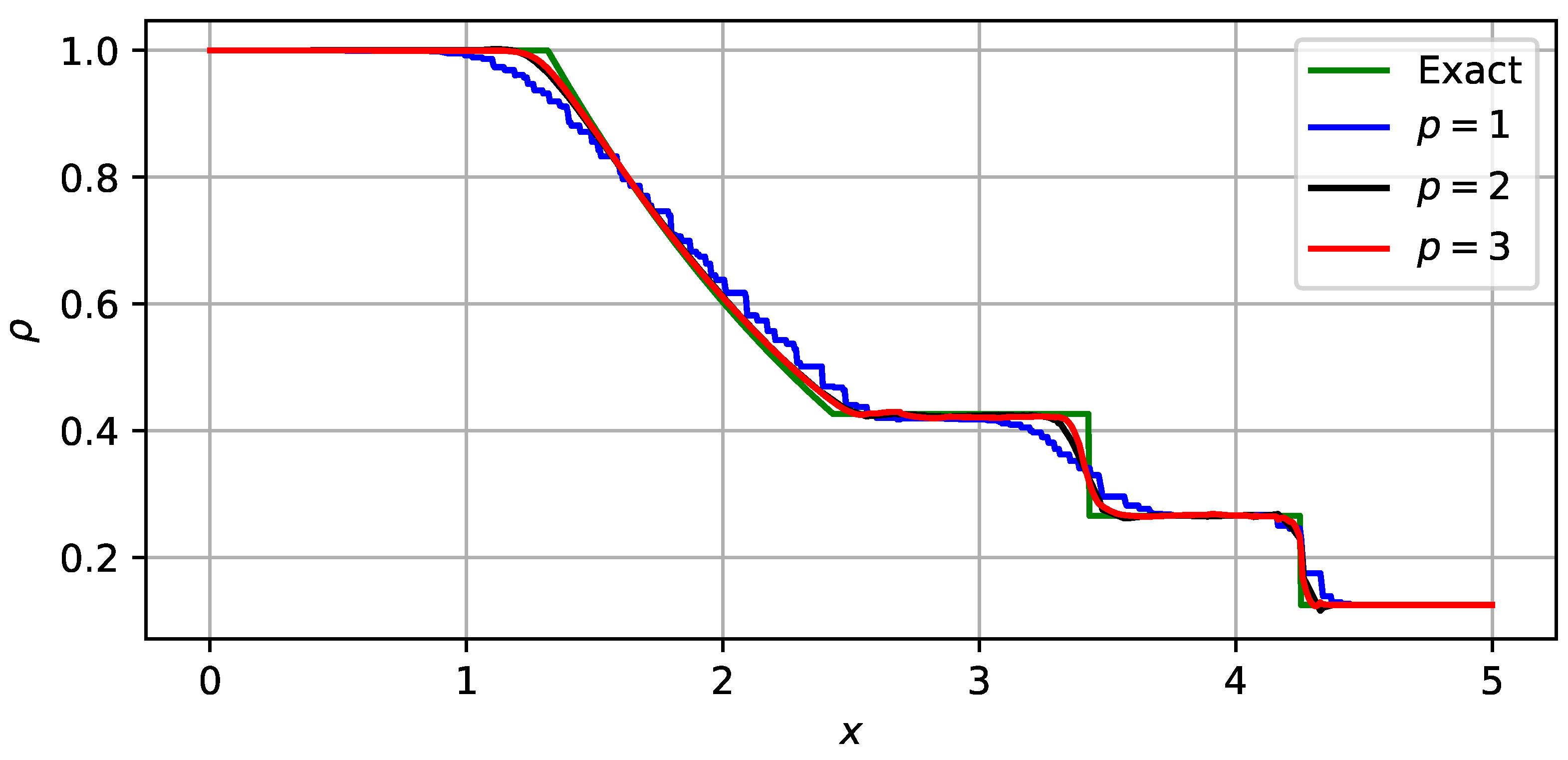
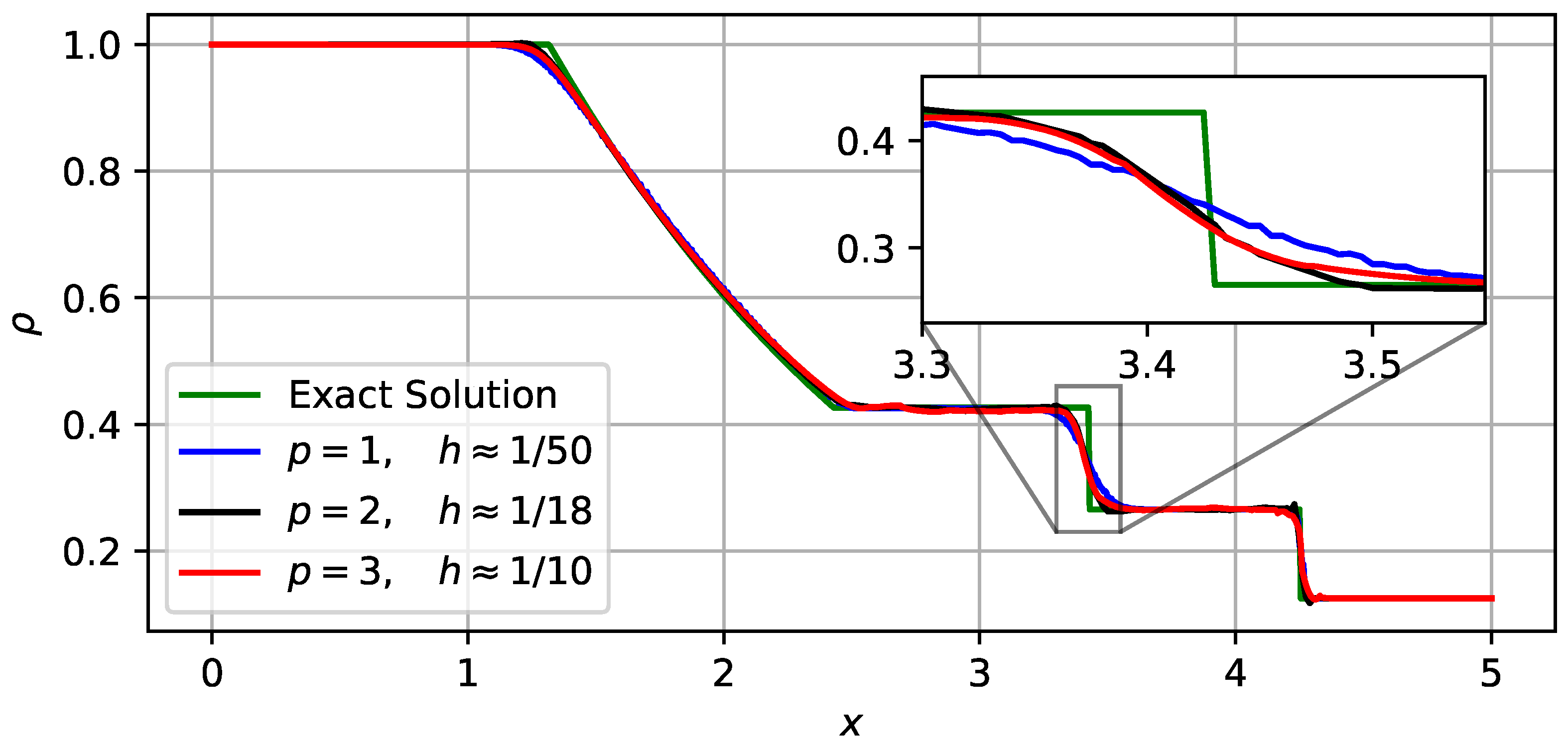
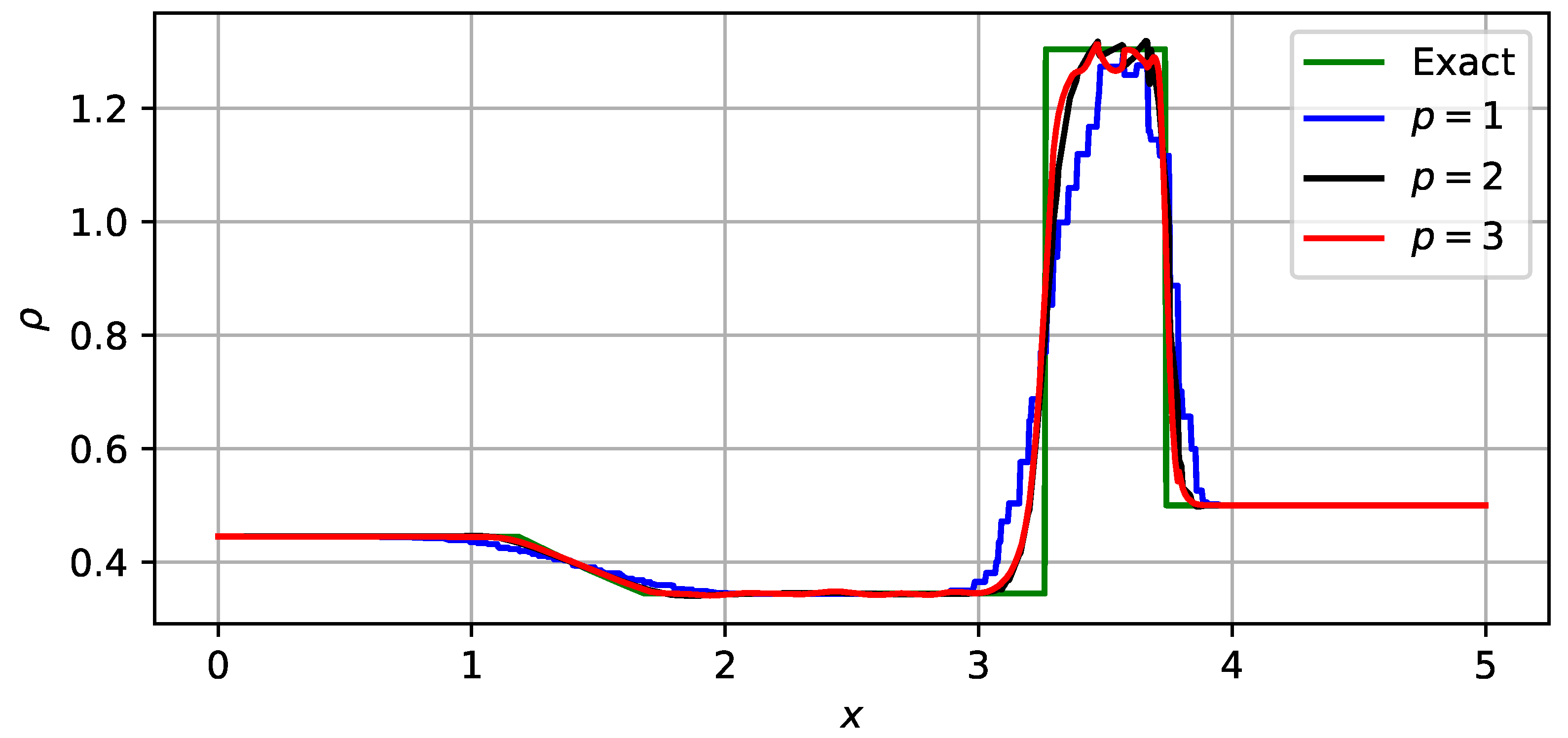
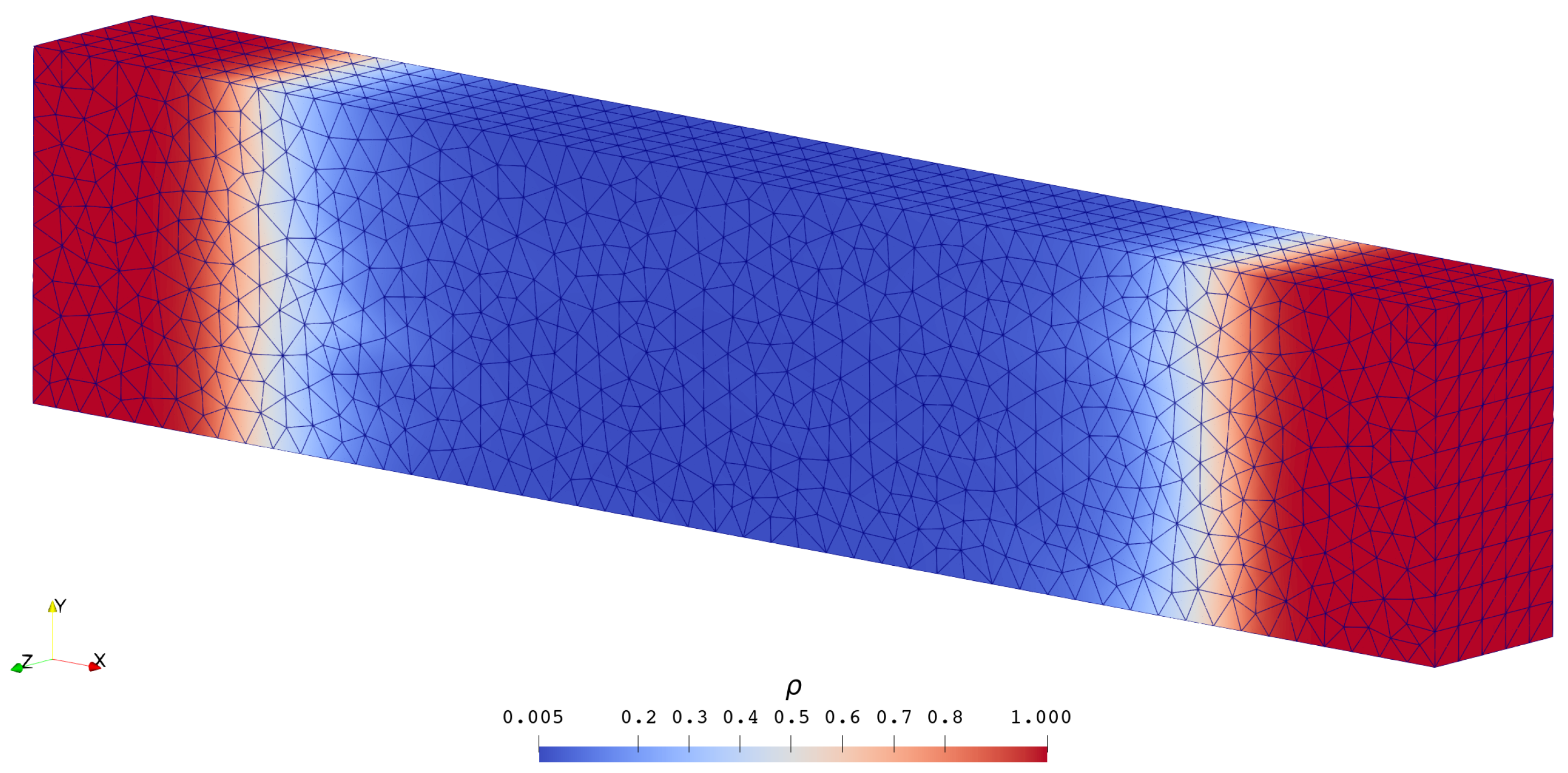
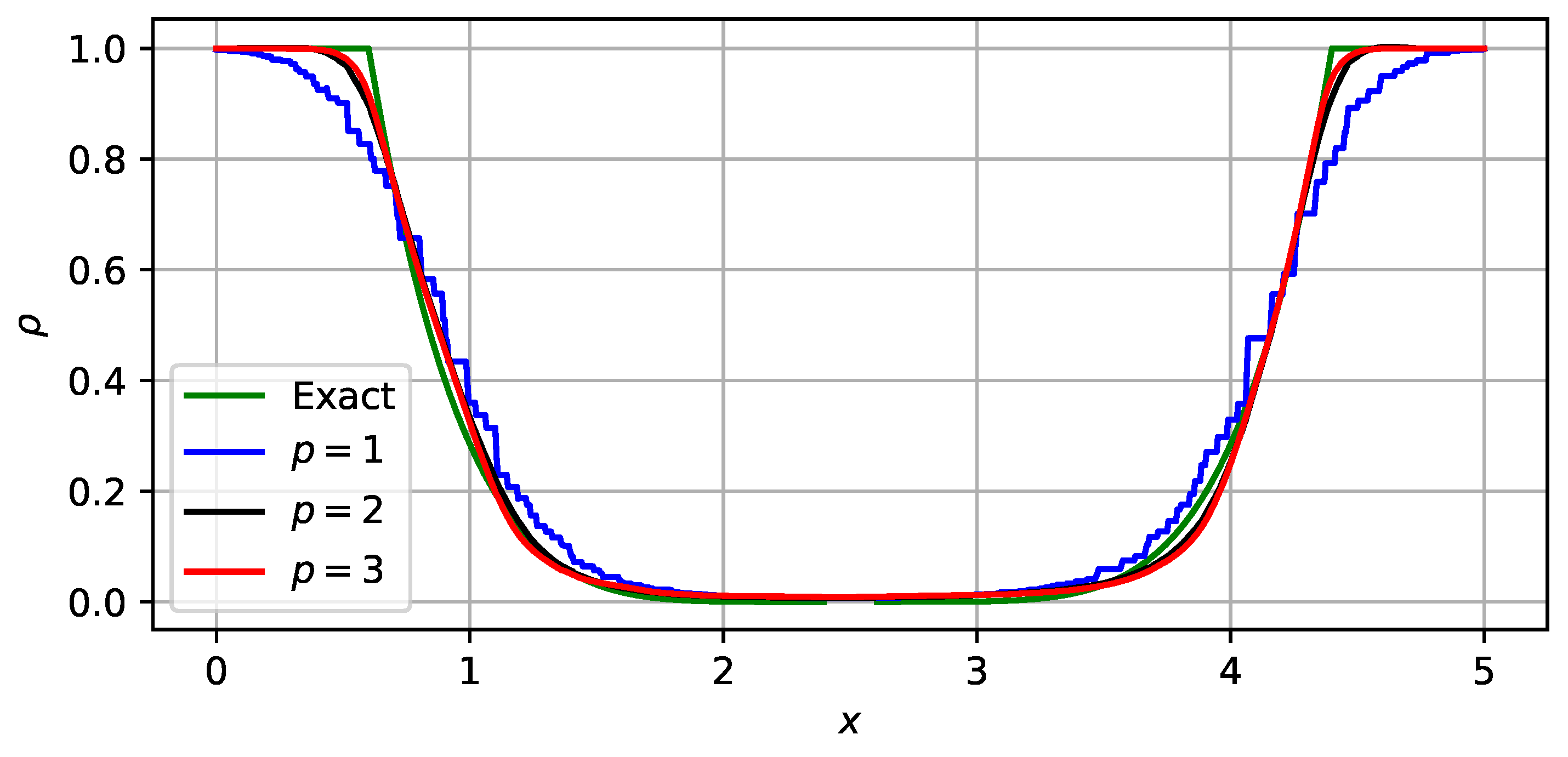
3.1.1. Shock Tube Problems
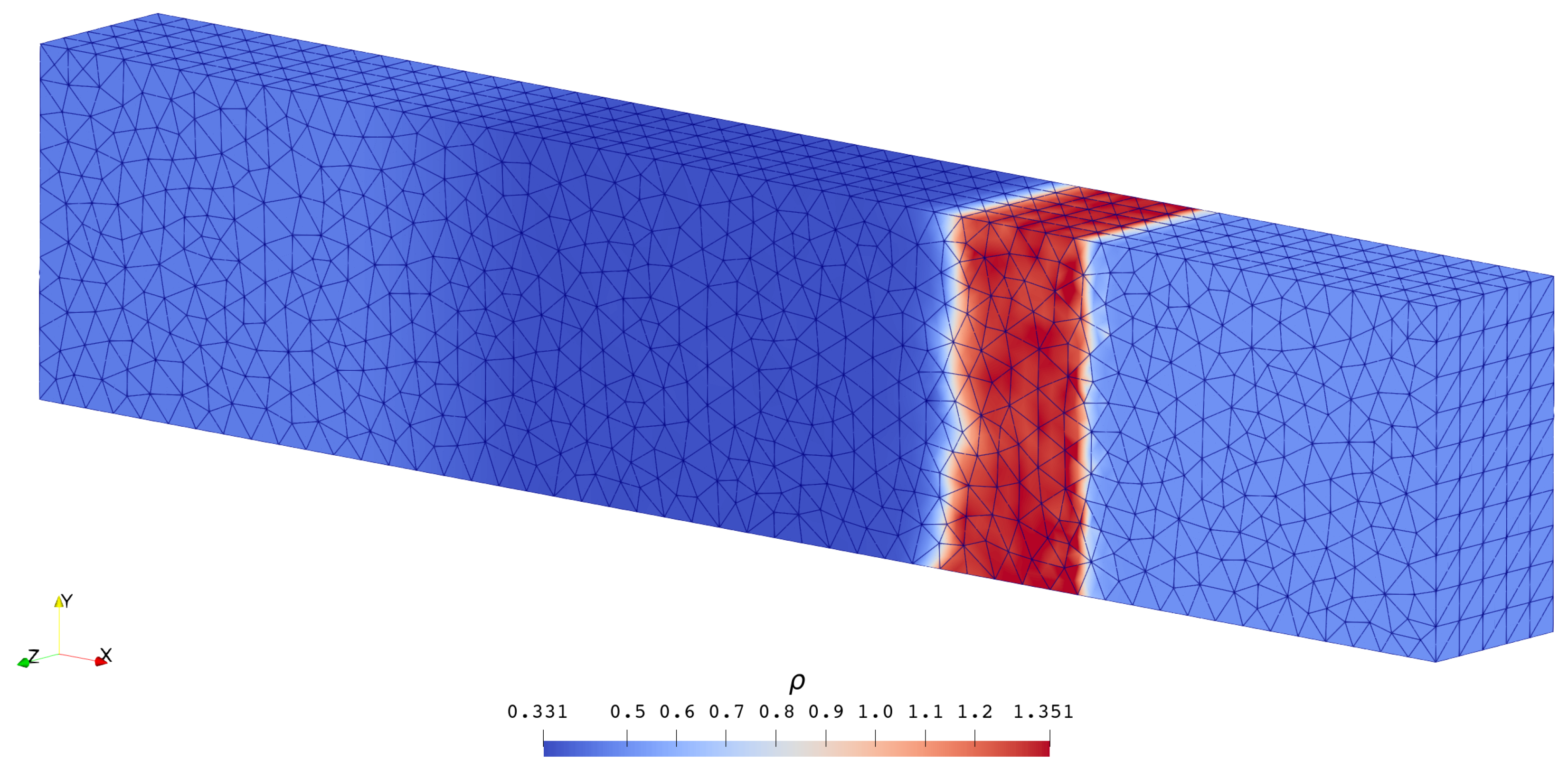
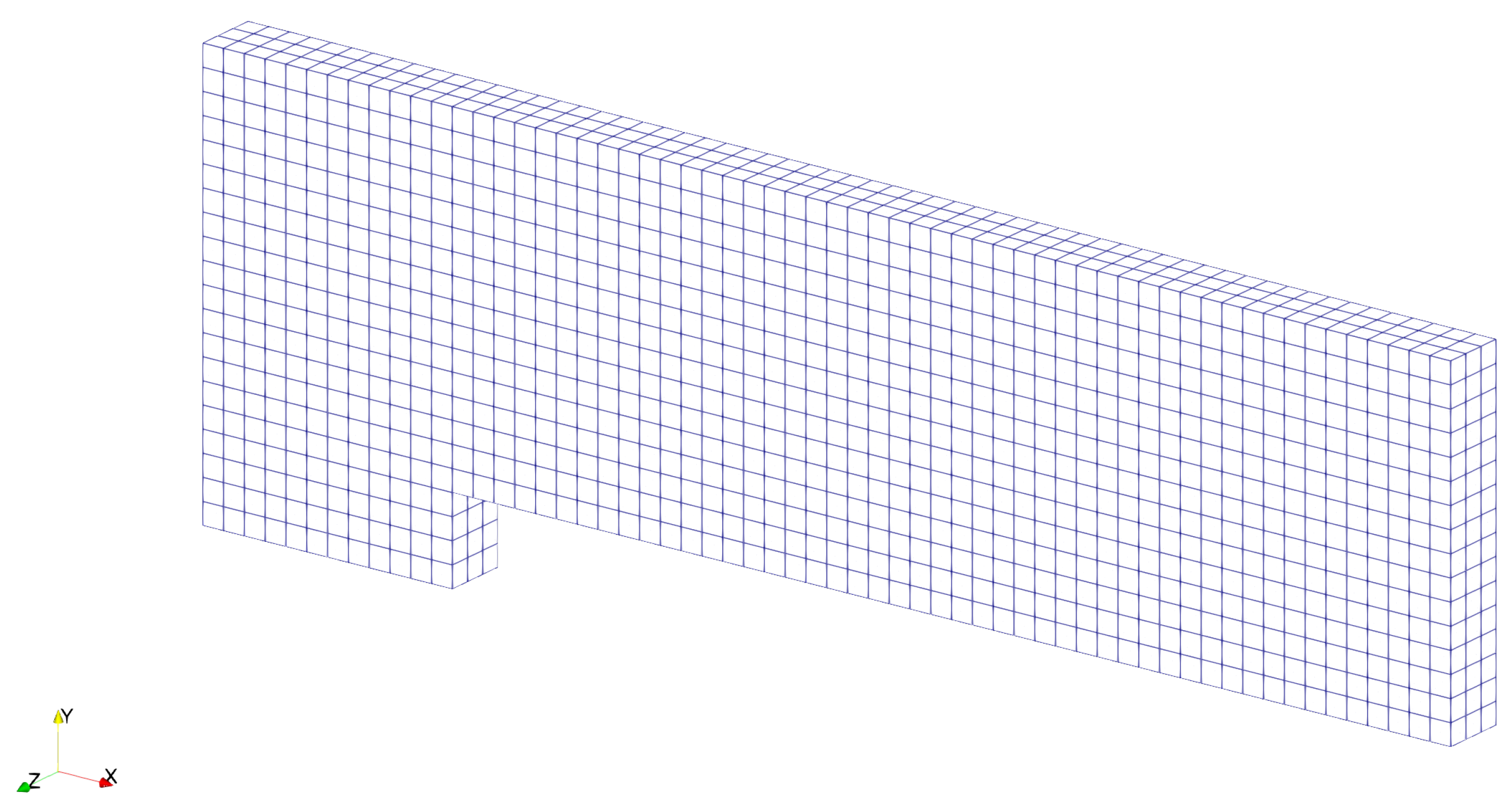
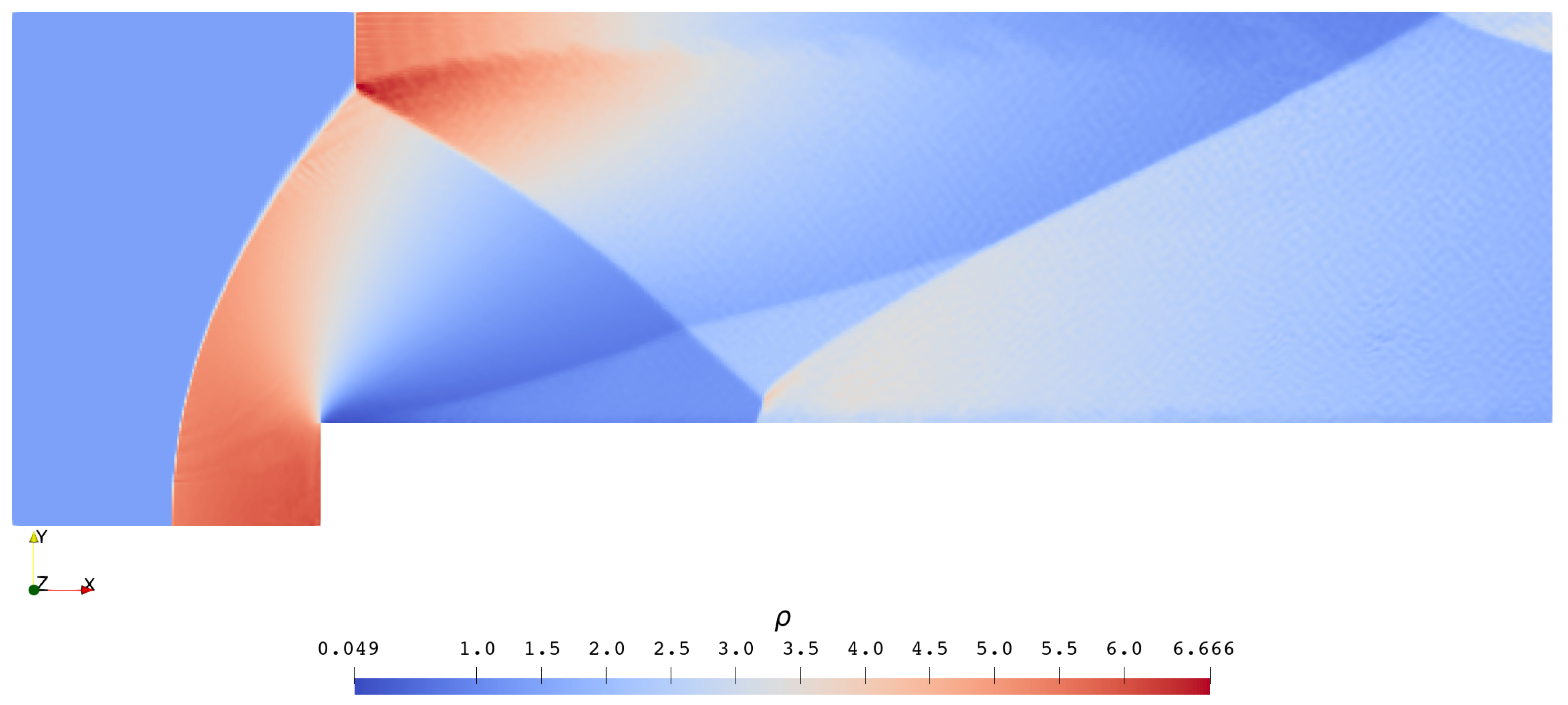
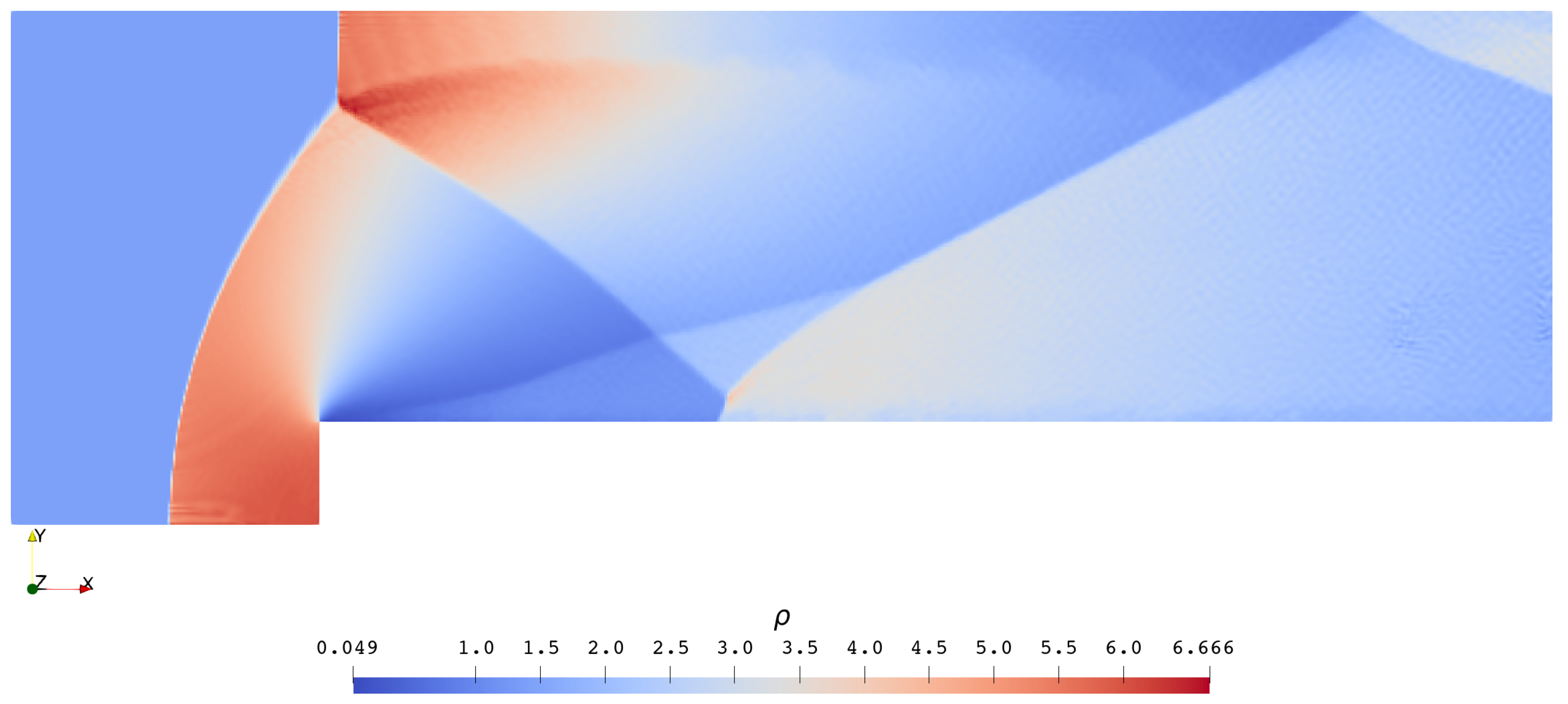
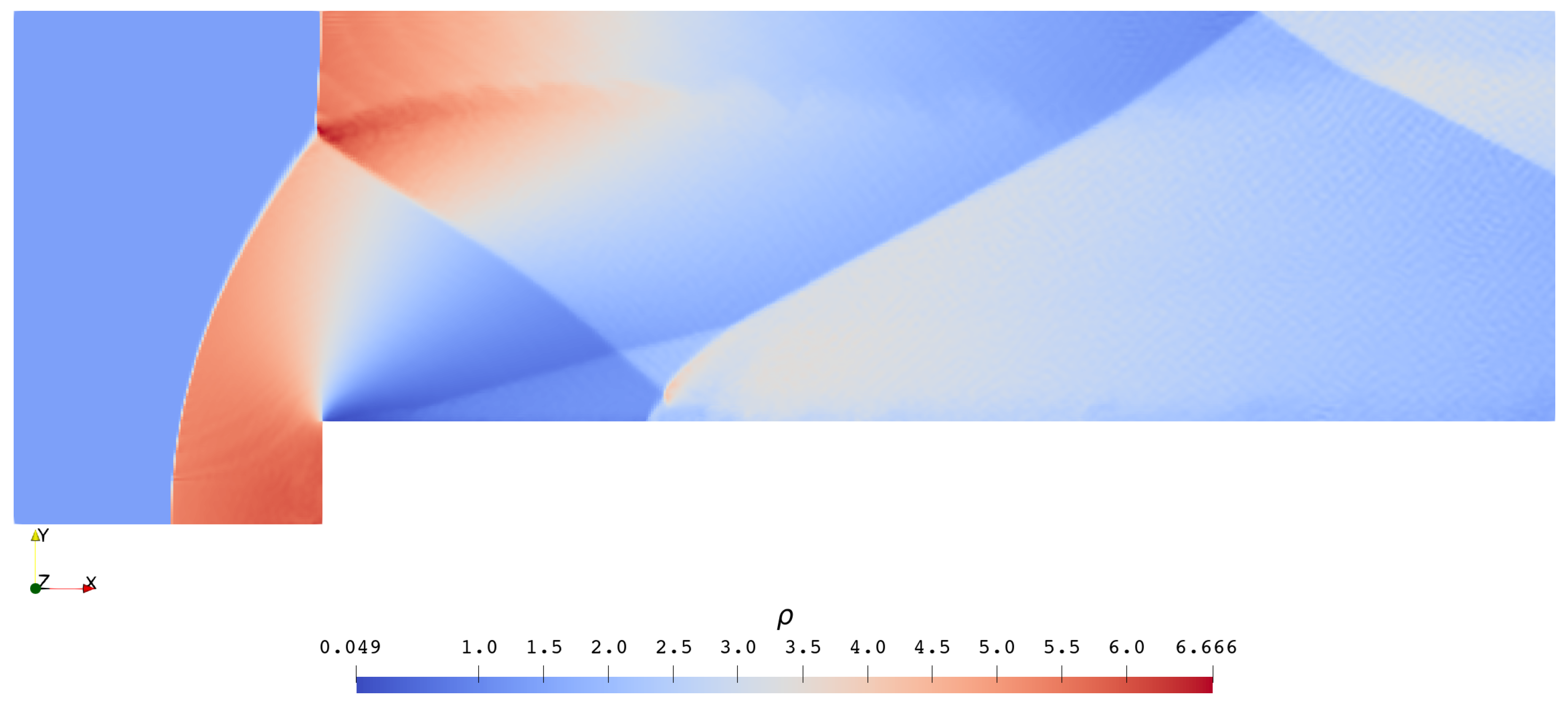
3.1.2. The Forward Step Problem
3.2. Three-Dimensional Engineering Problems
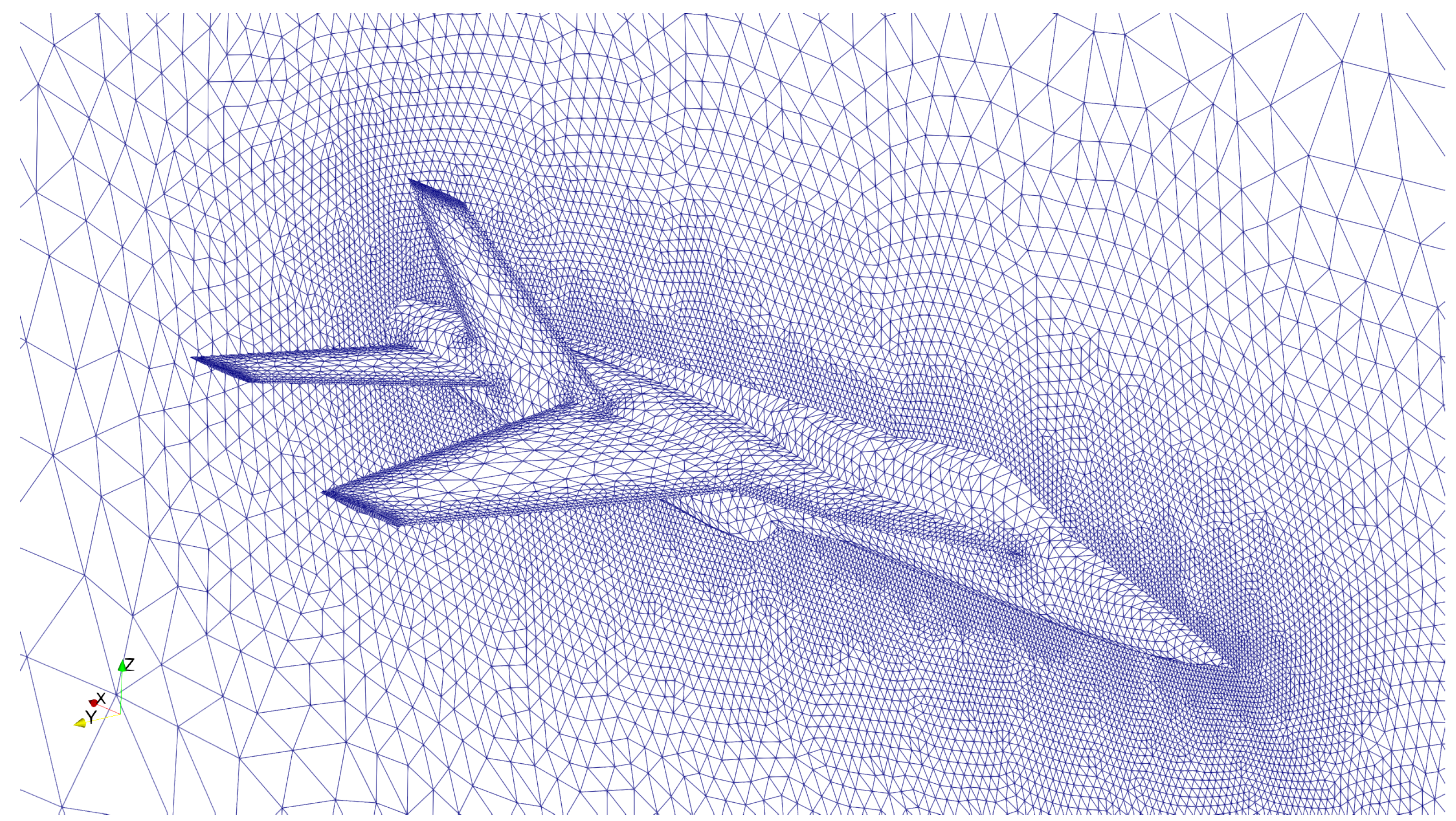
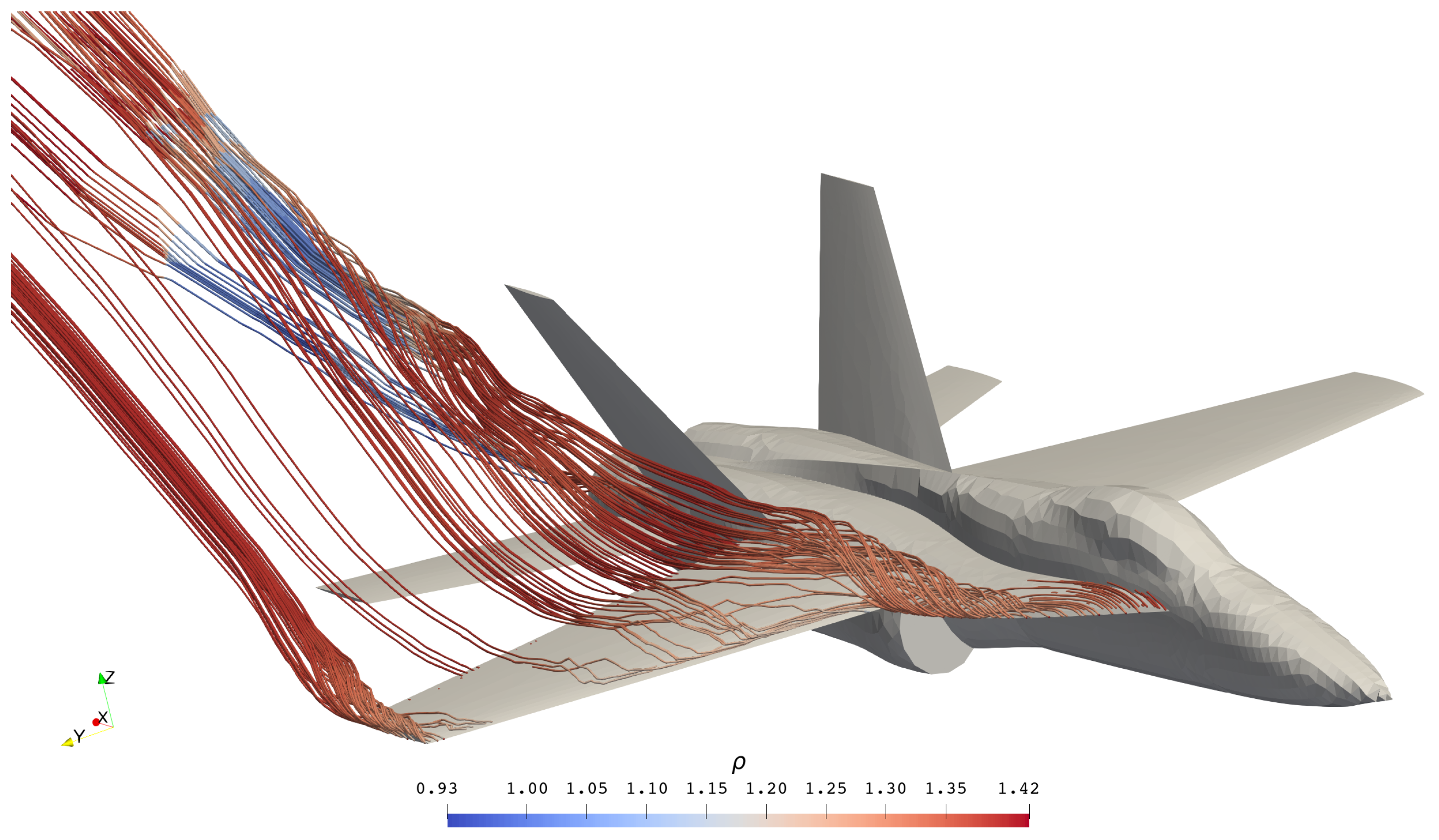
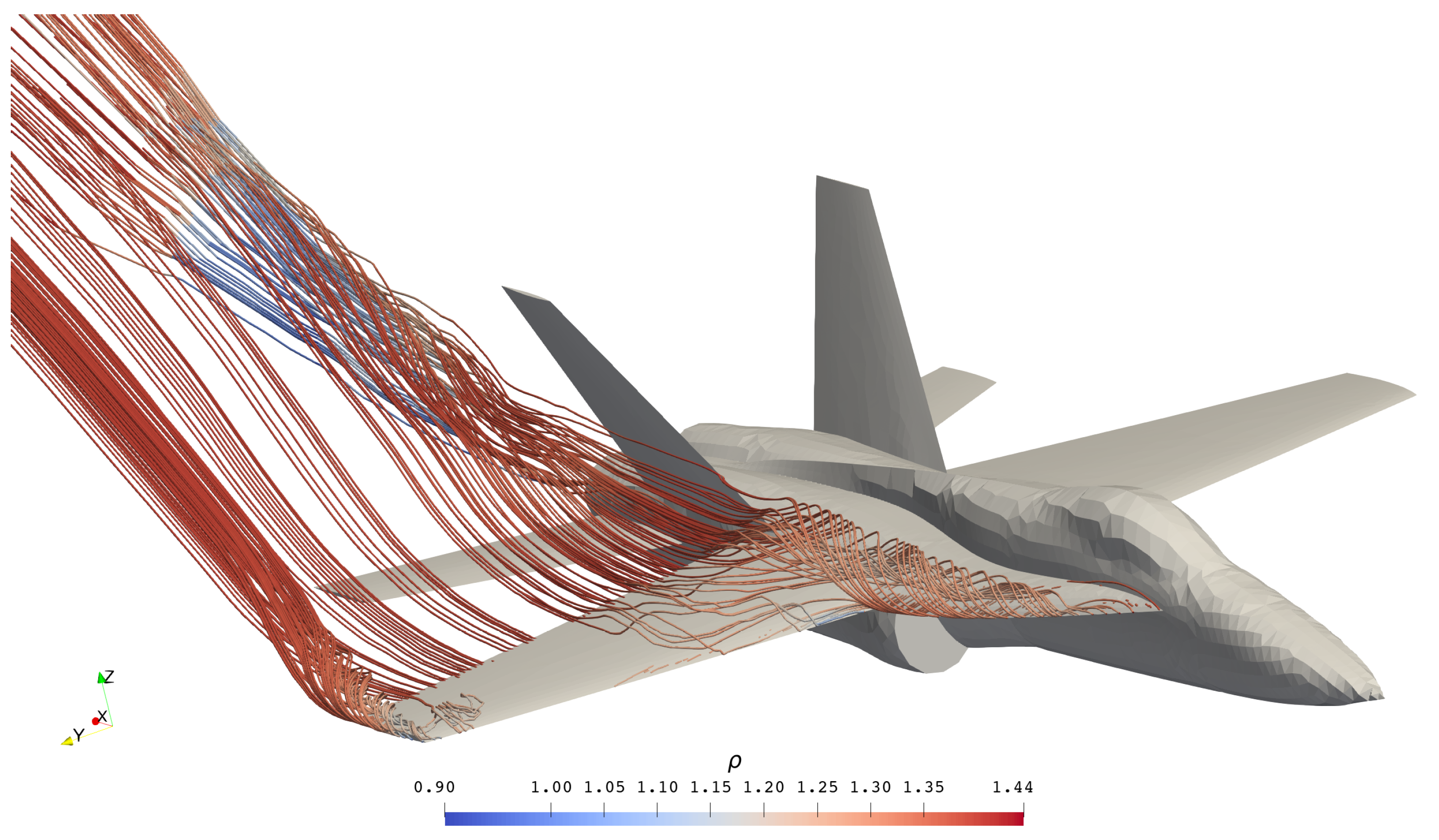
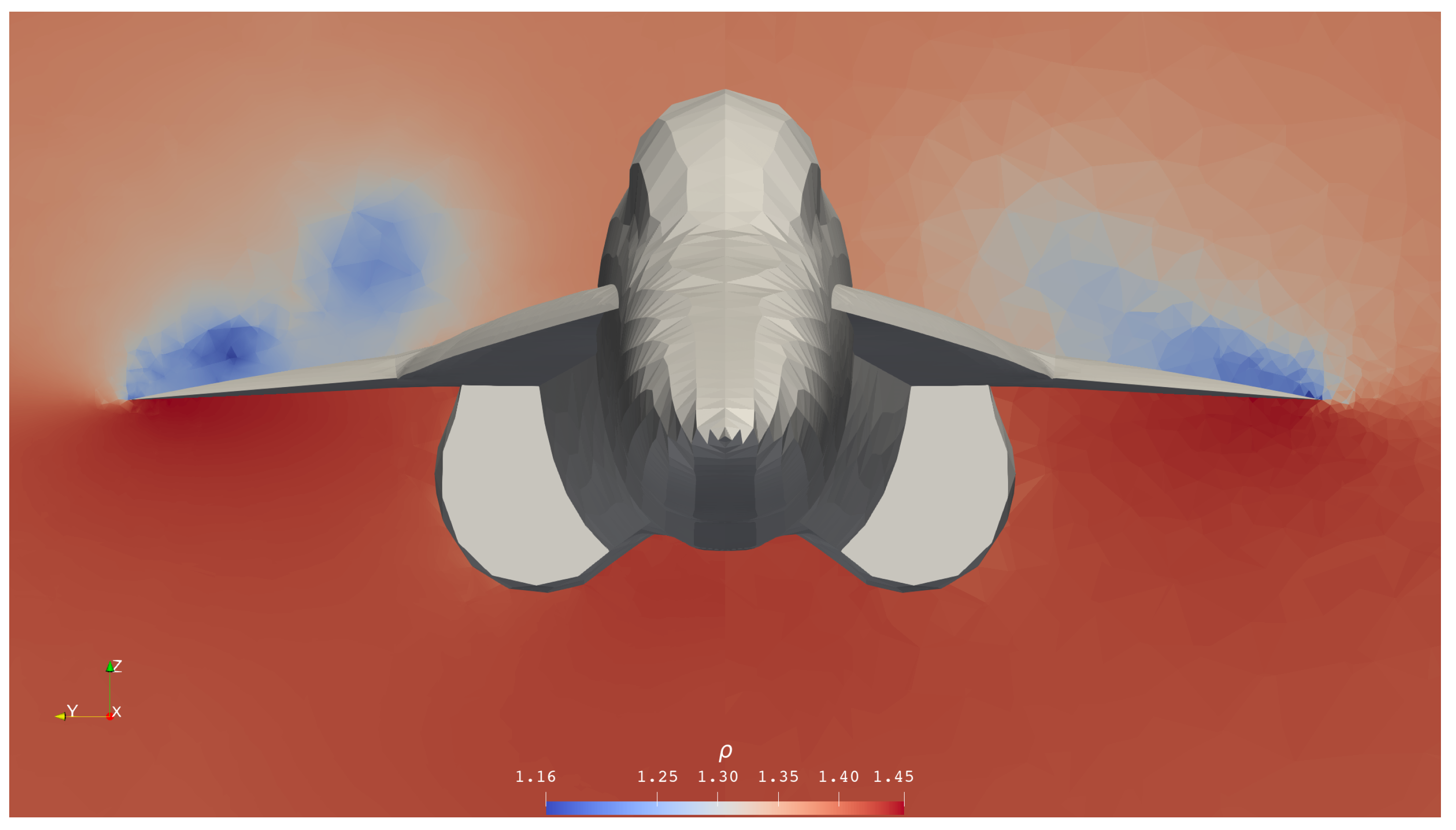
3.2.1. YF-17 in Subsonic Flight
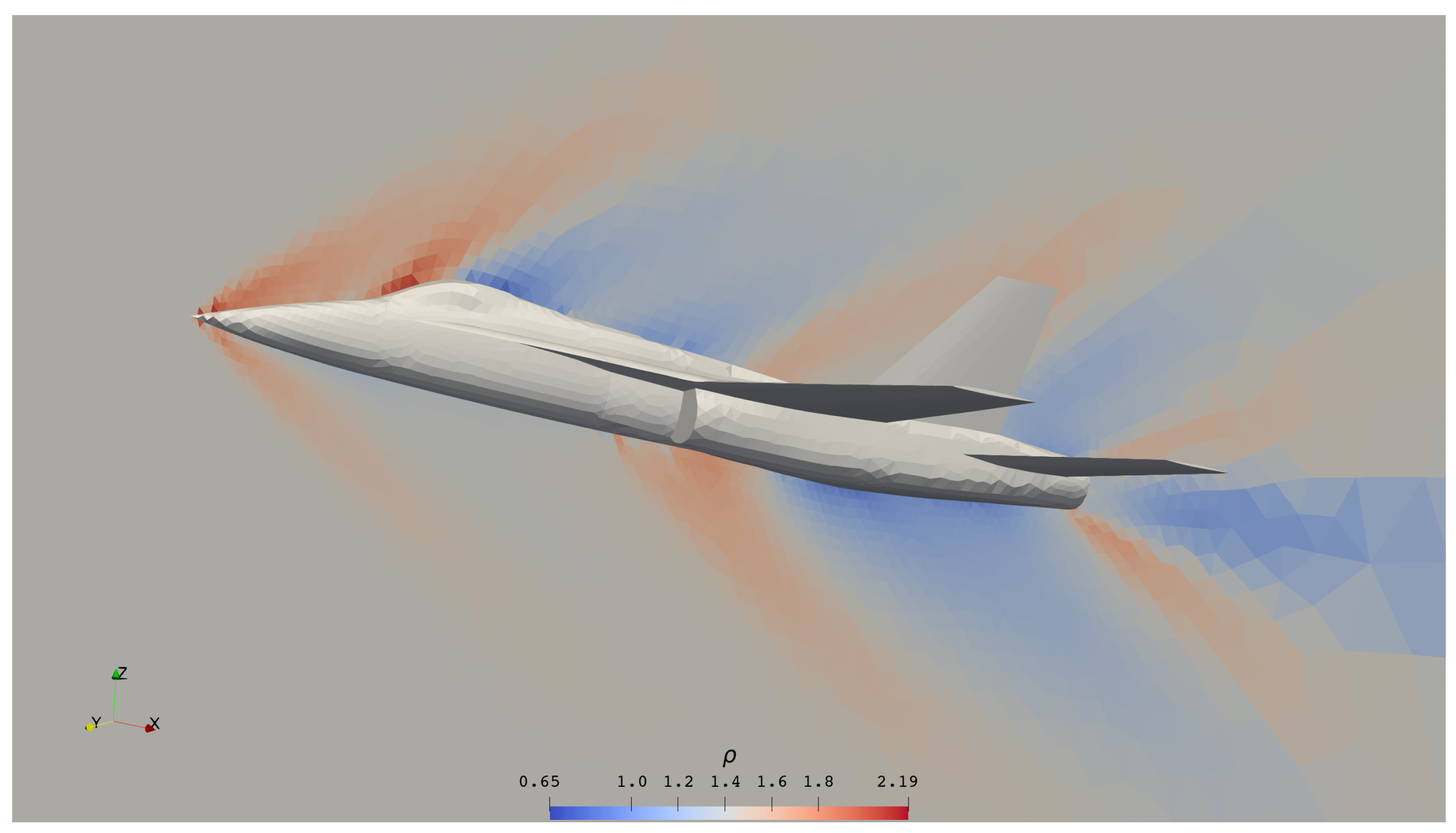
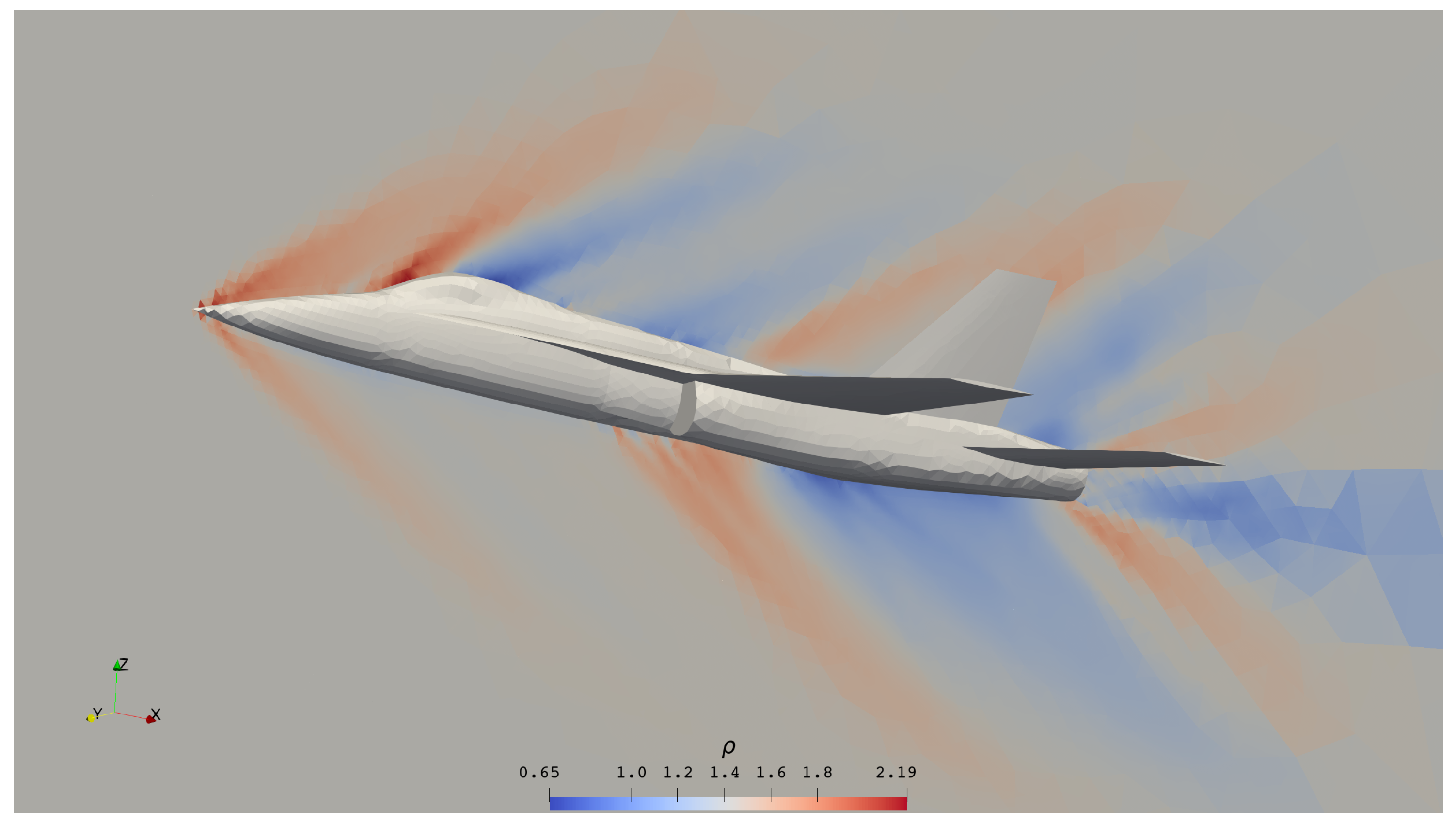
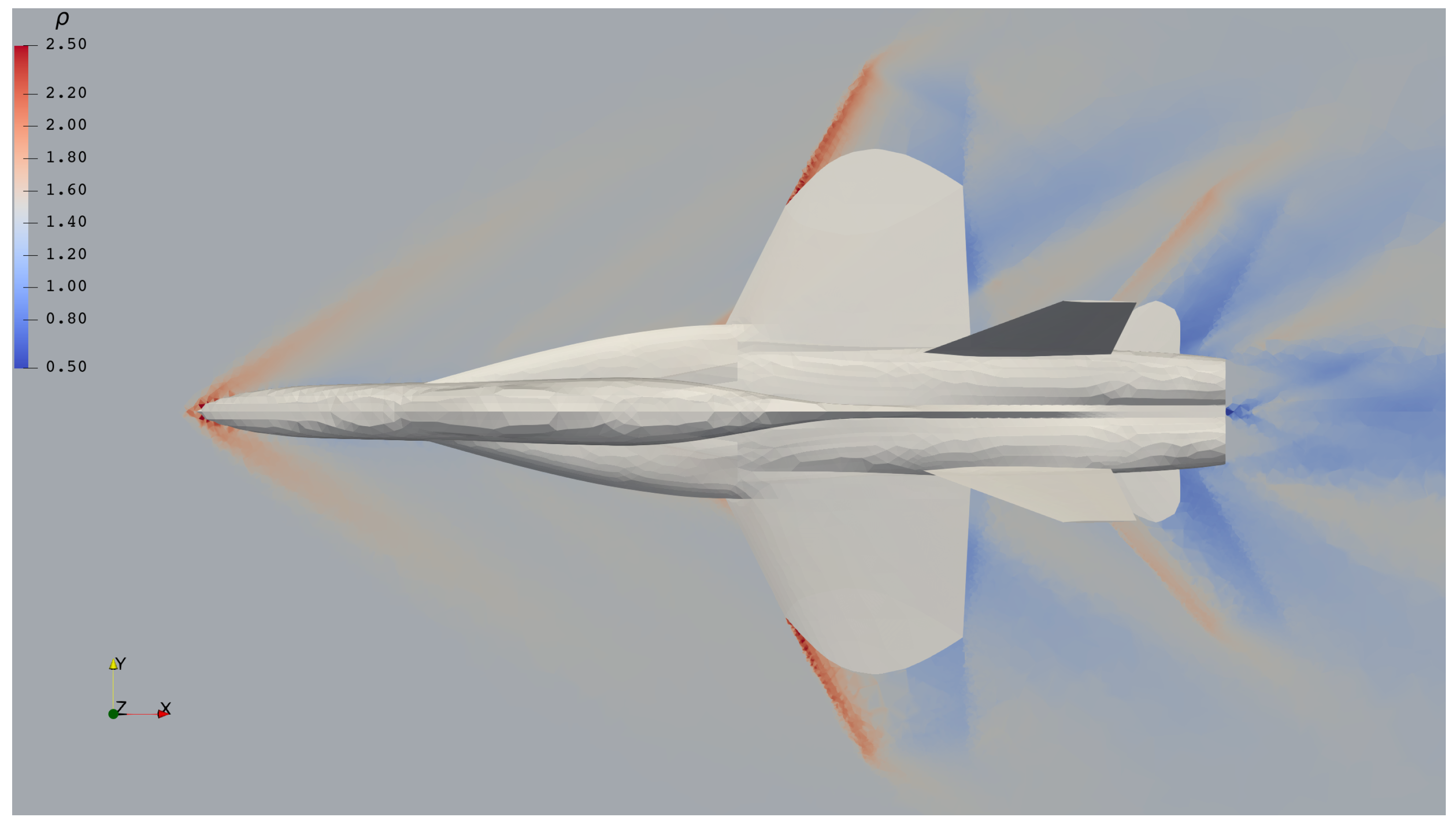
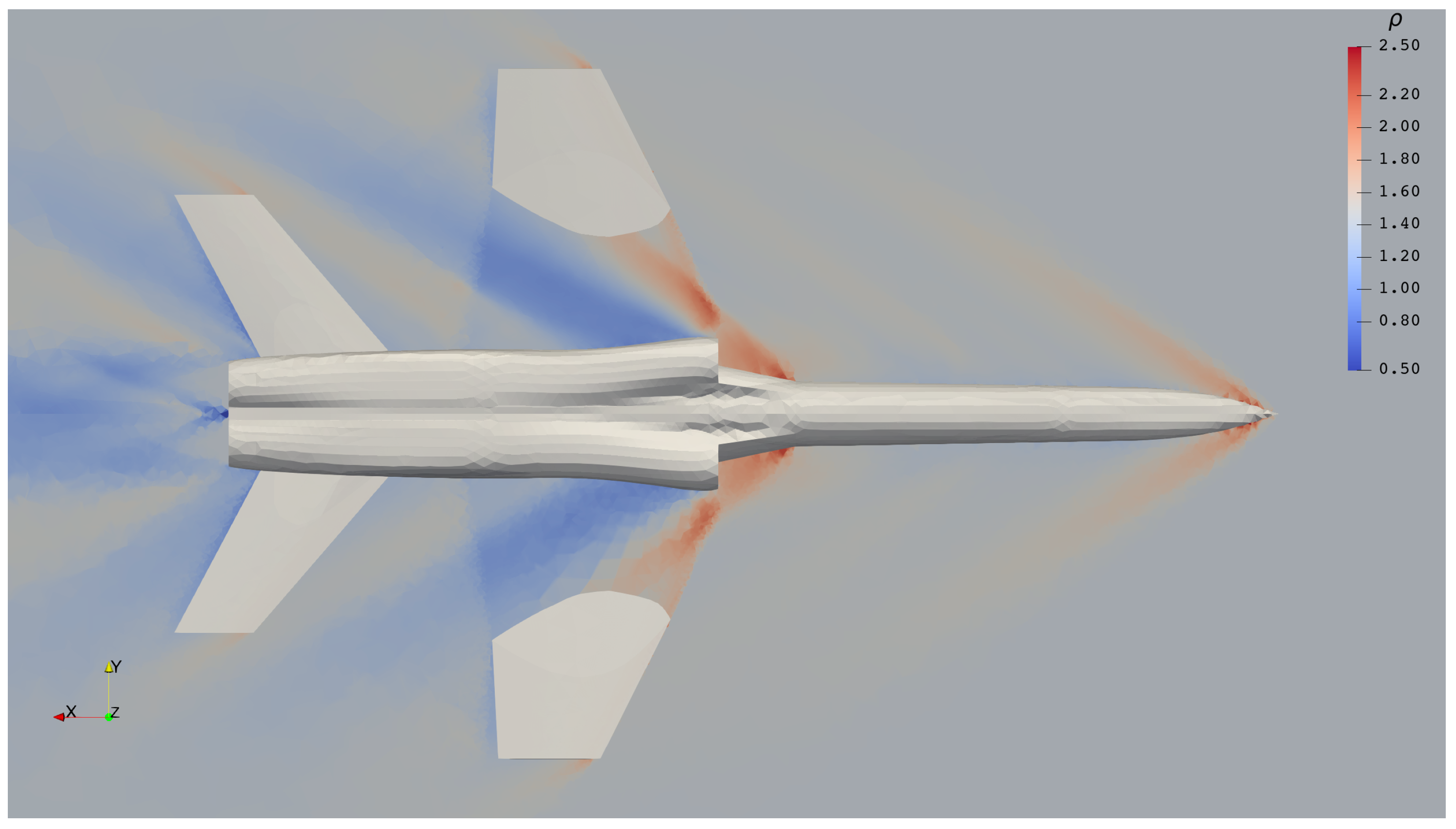
3.2.2. YF-17 in Supersonic Flight
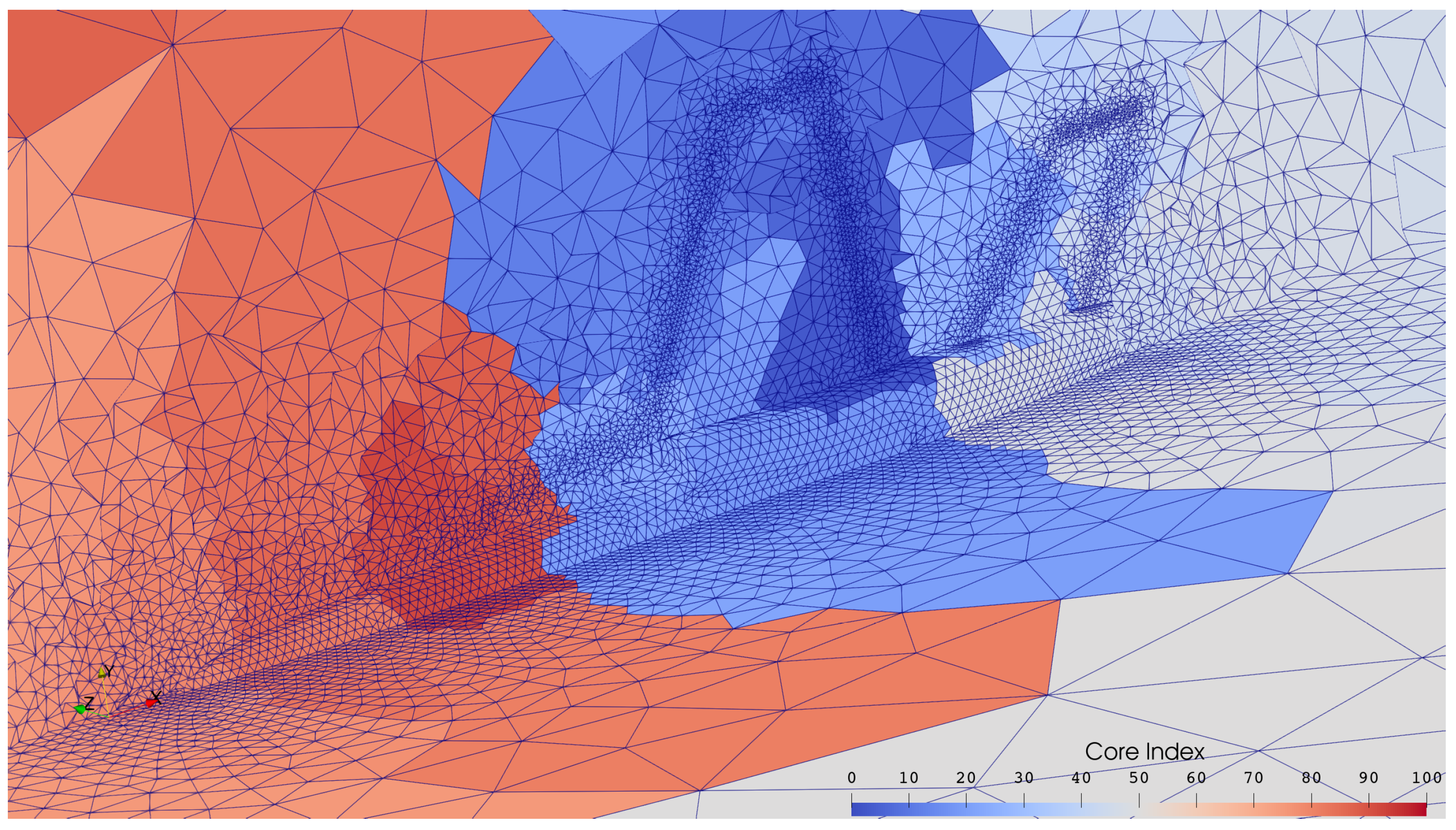
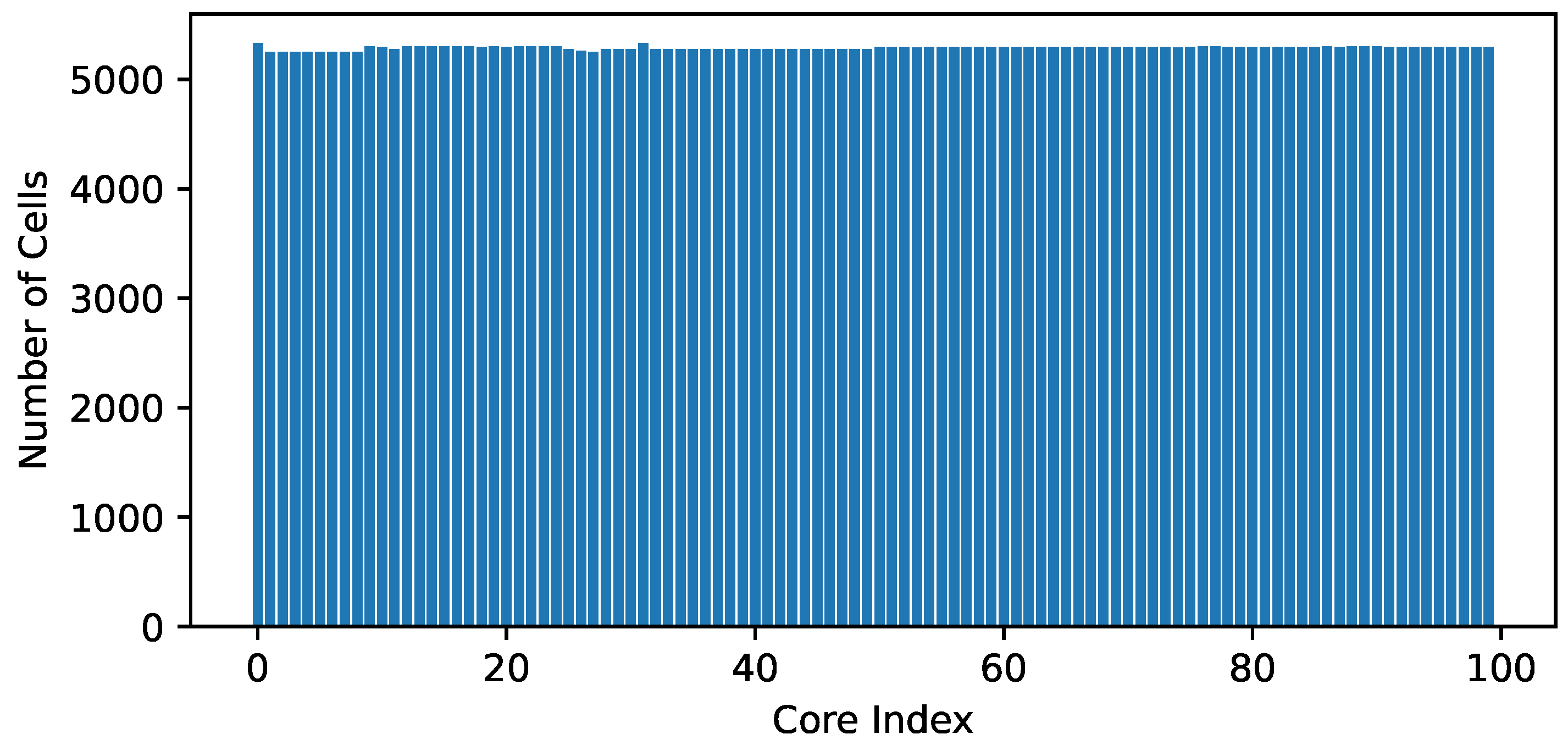
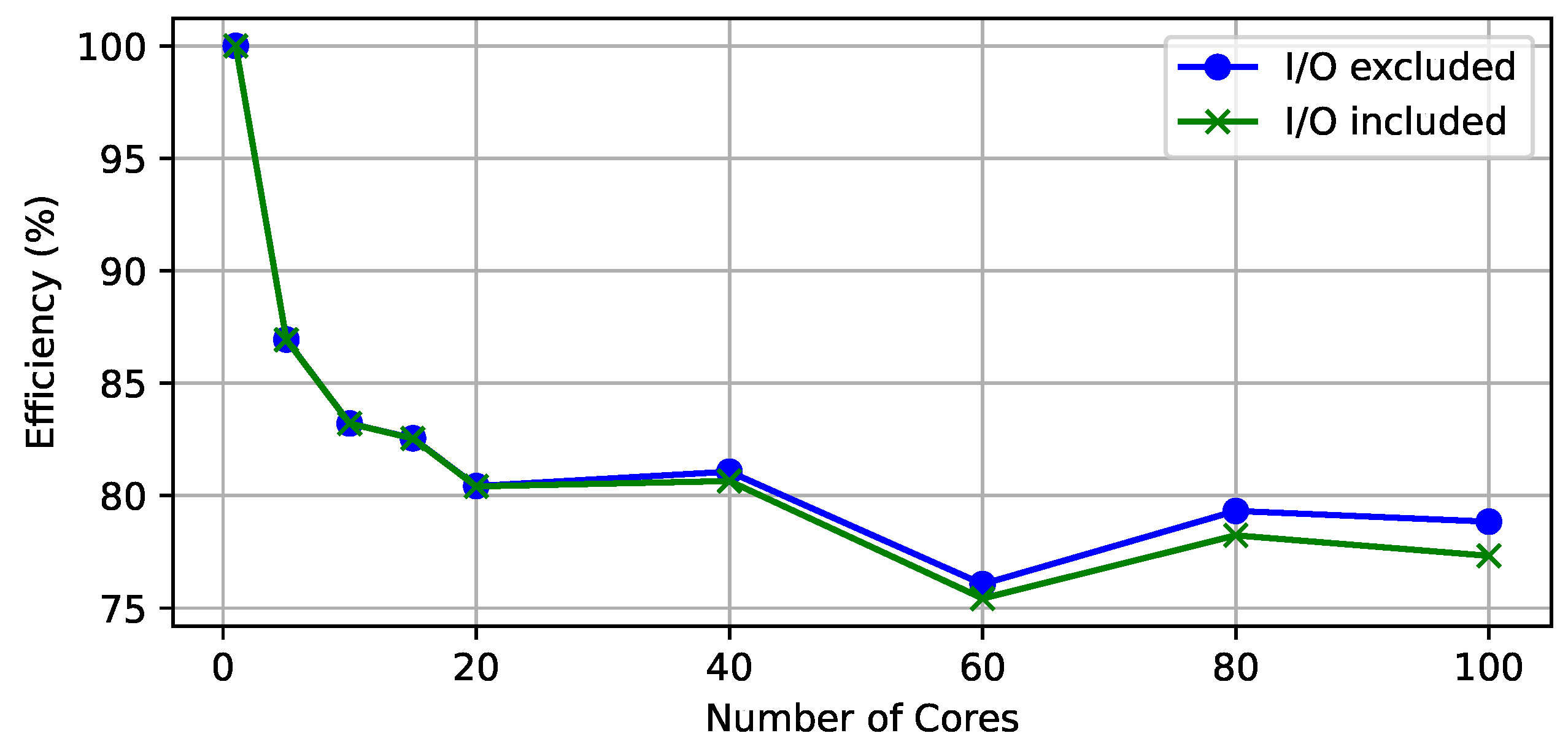
3.2.3. Parallel Efficiency
3.3. Problems with Momentum Sources
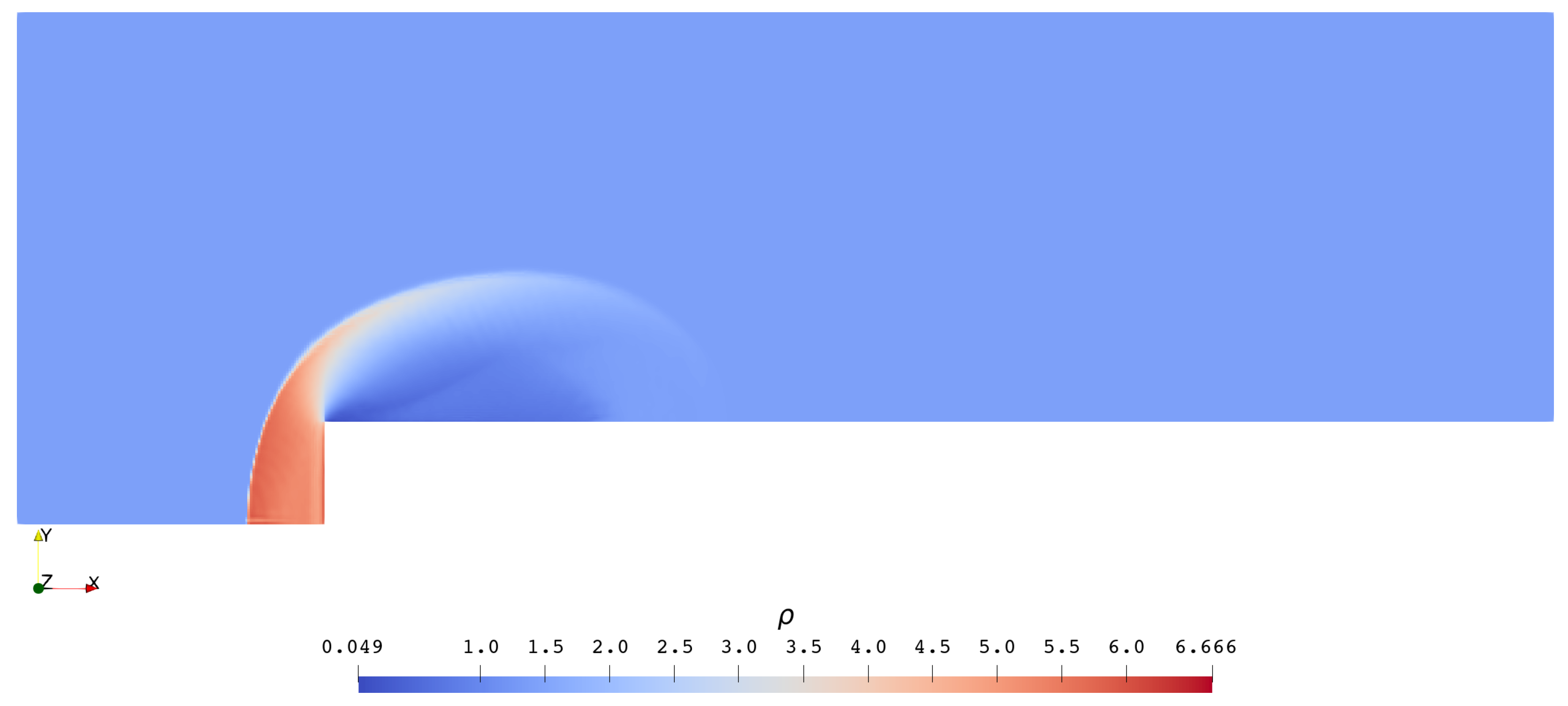
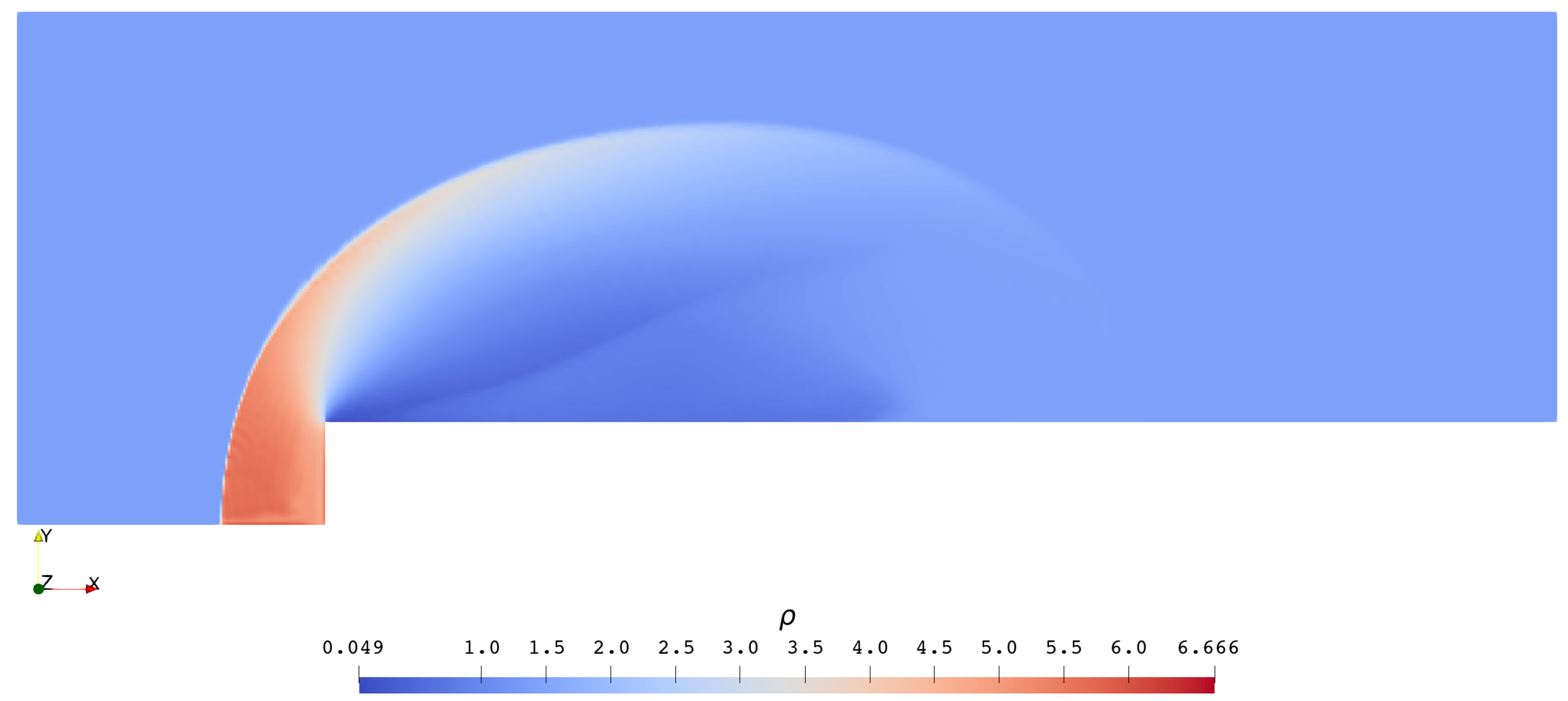
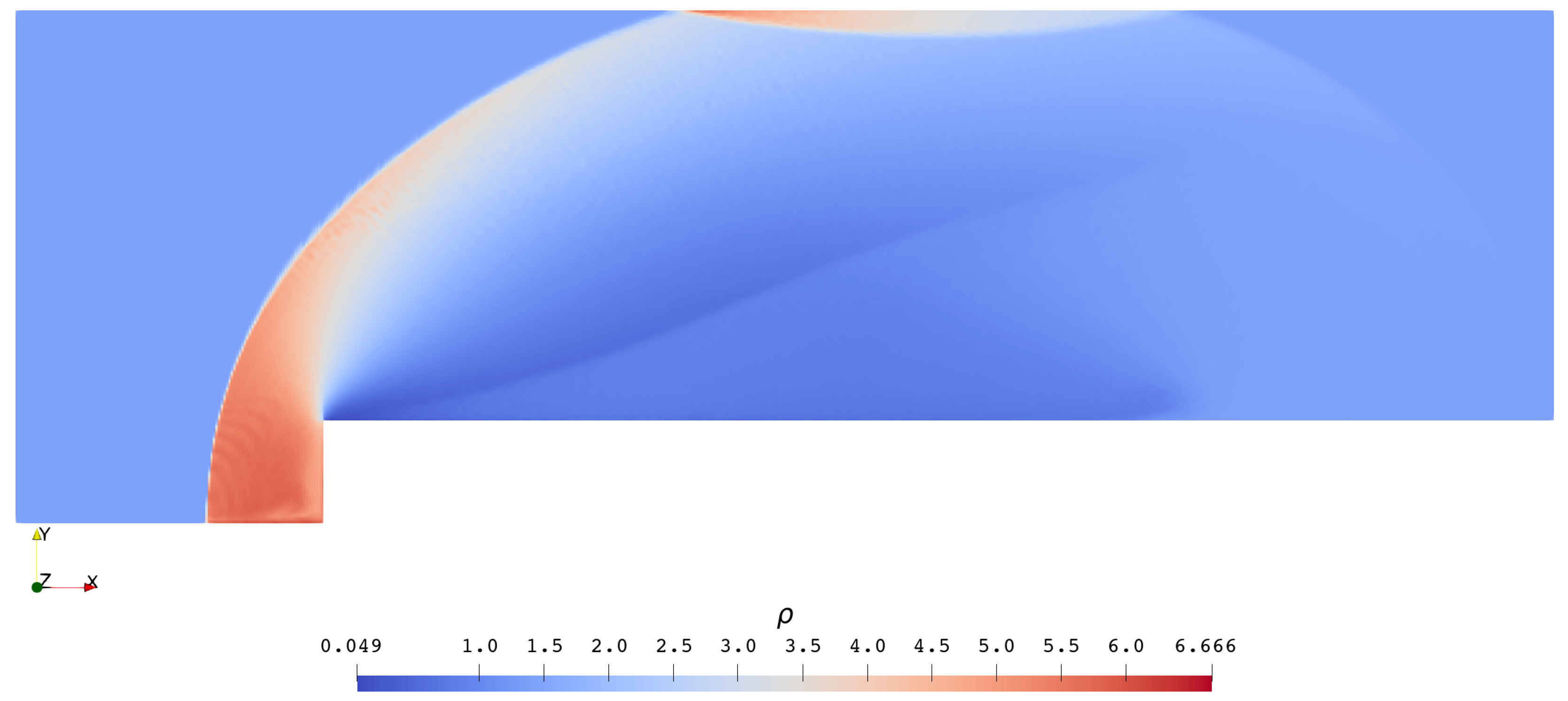
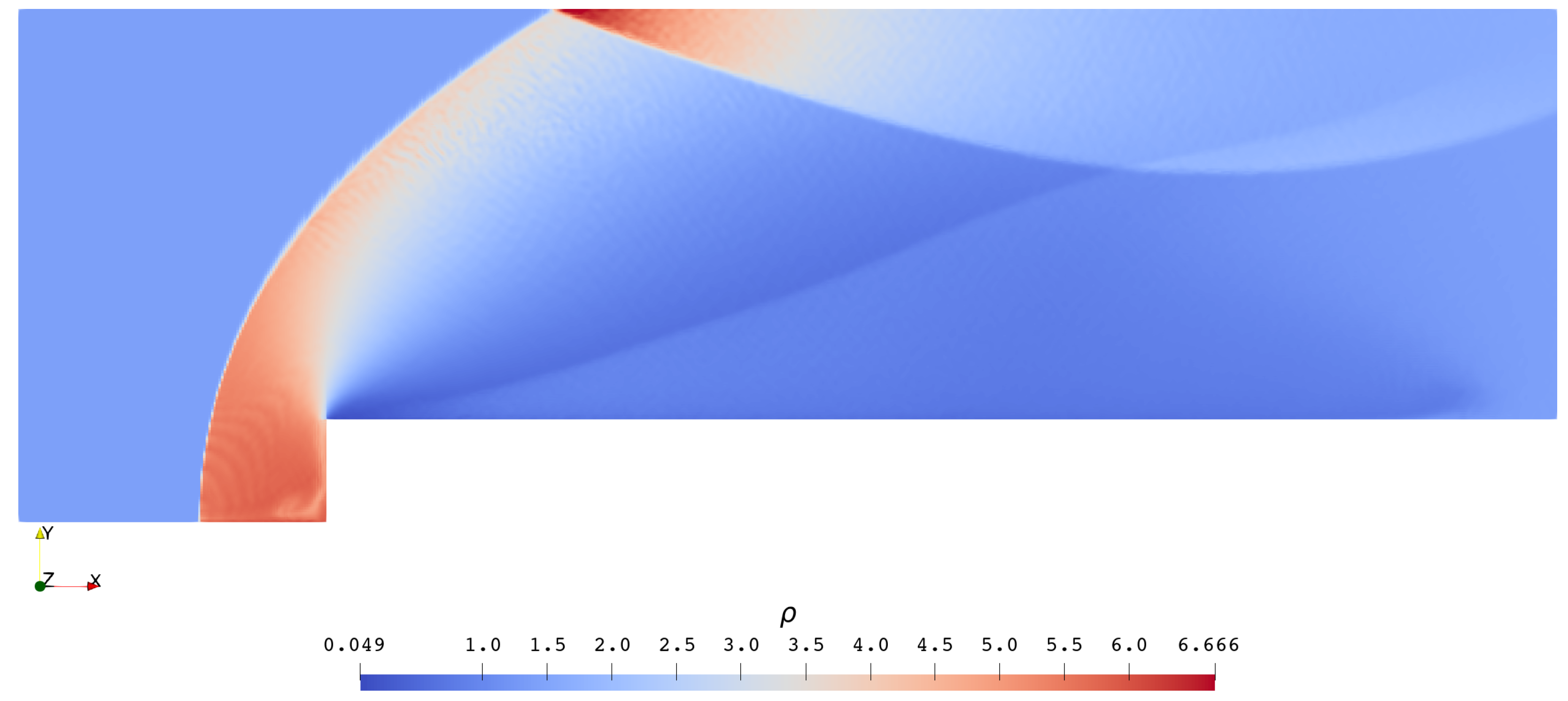
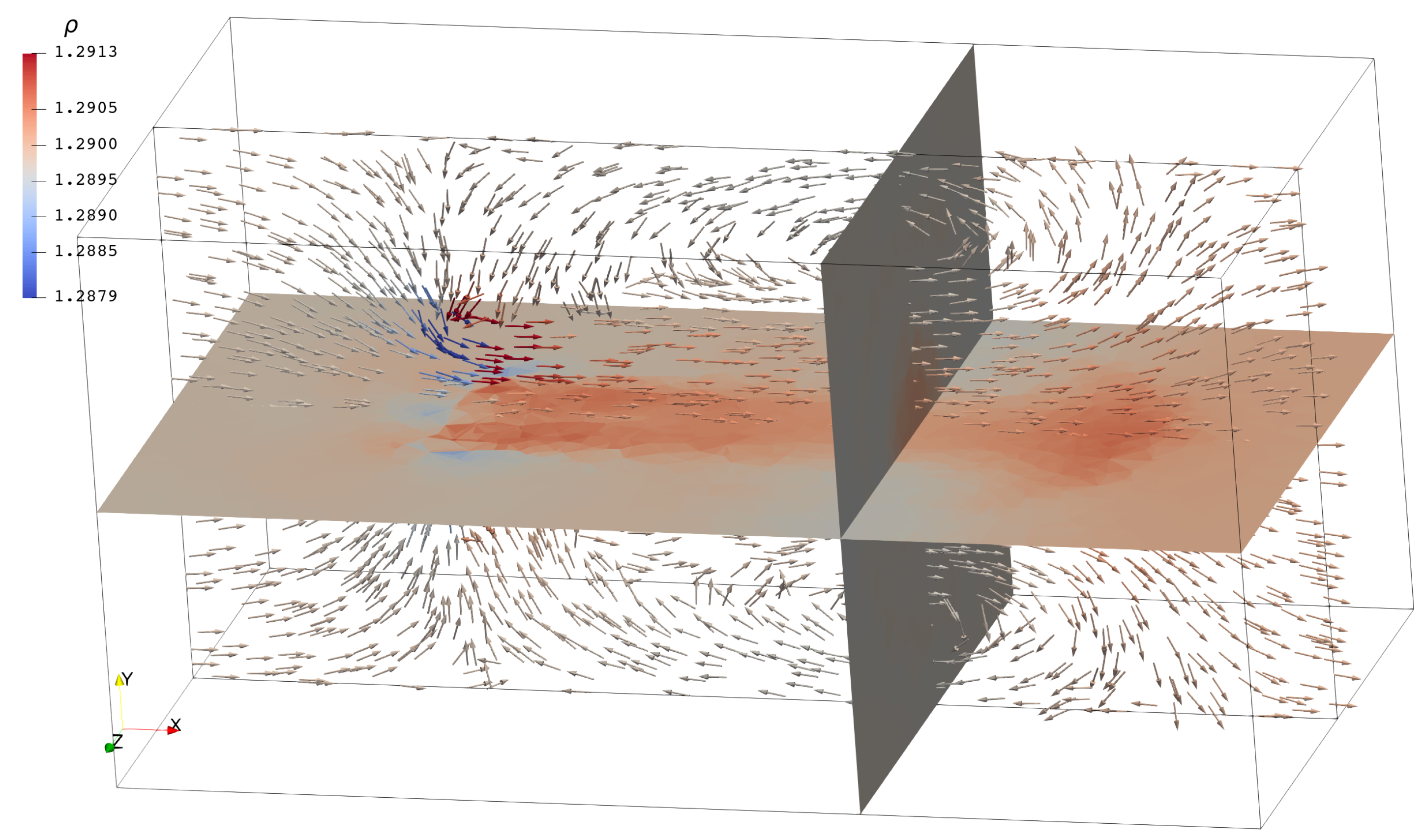
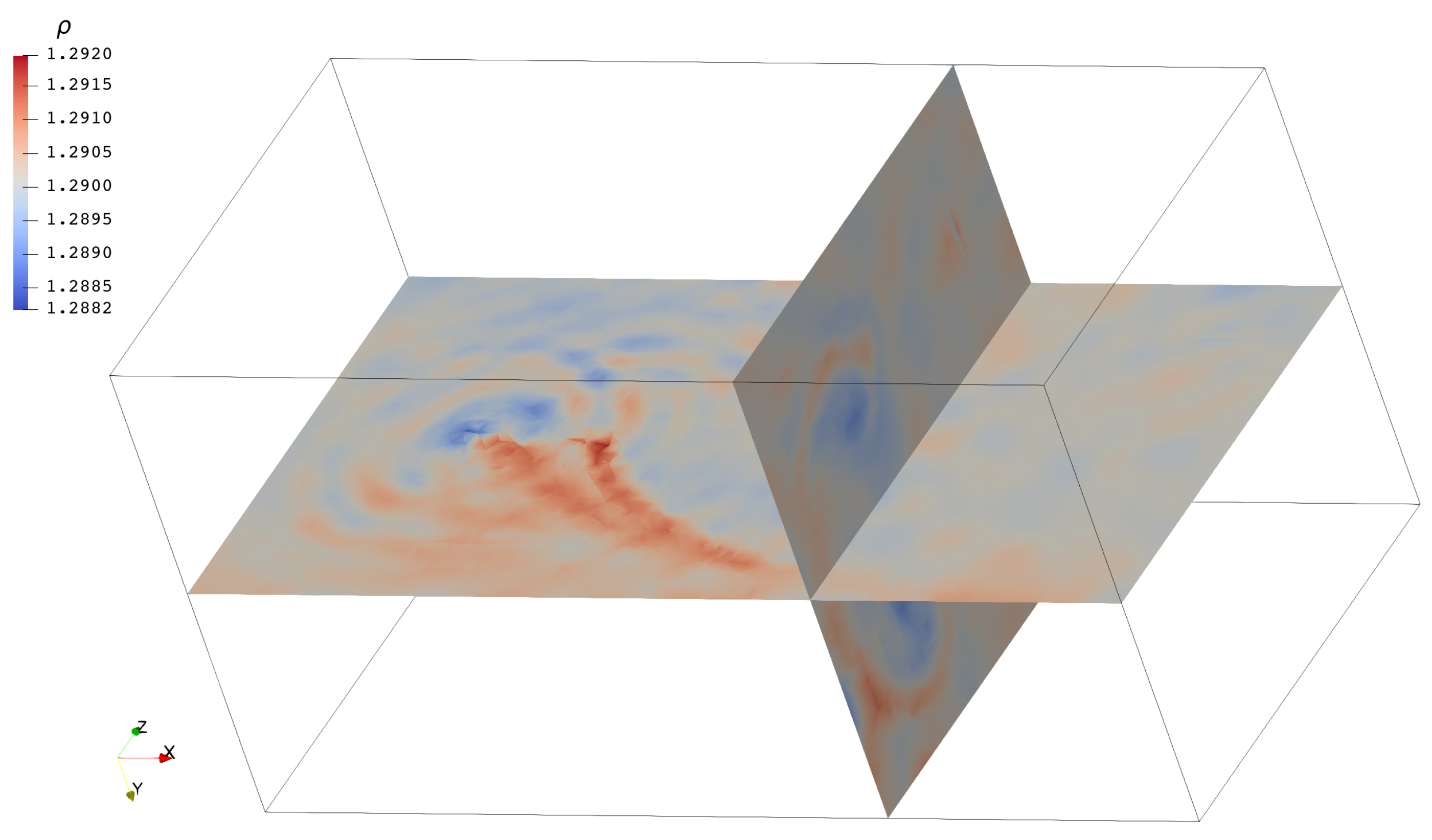
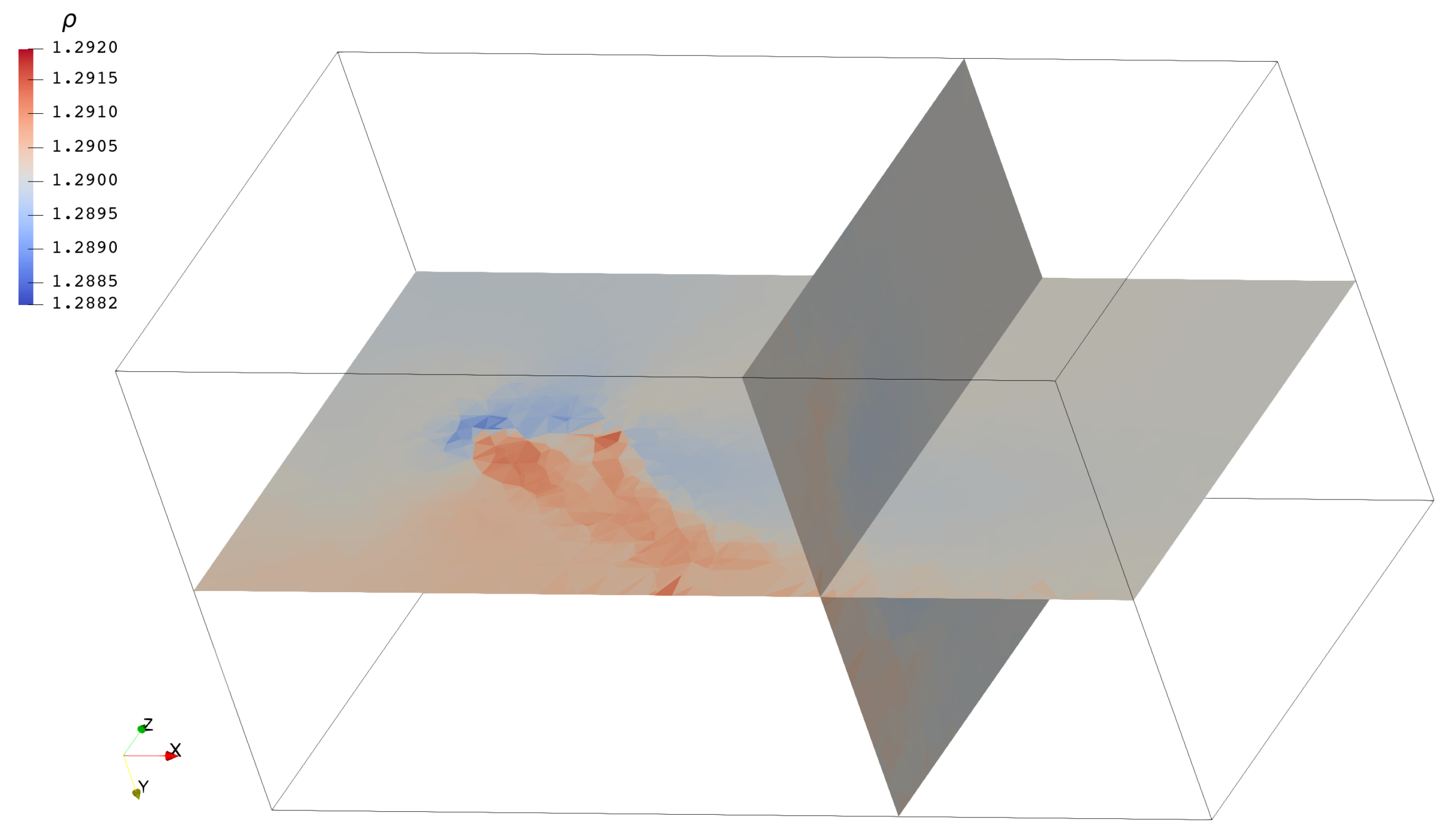
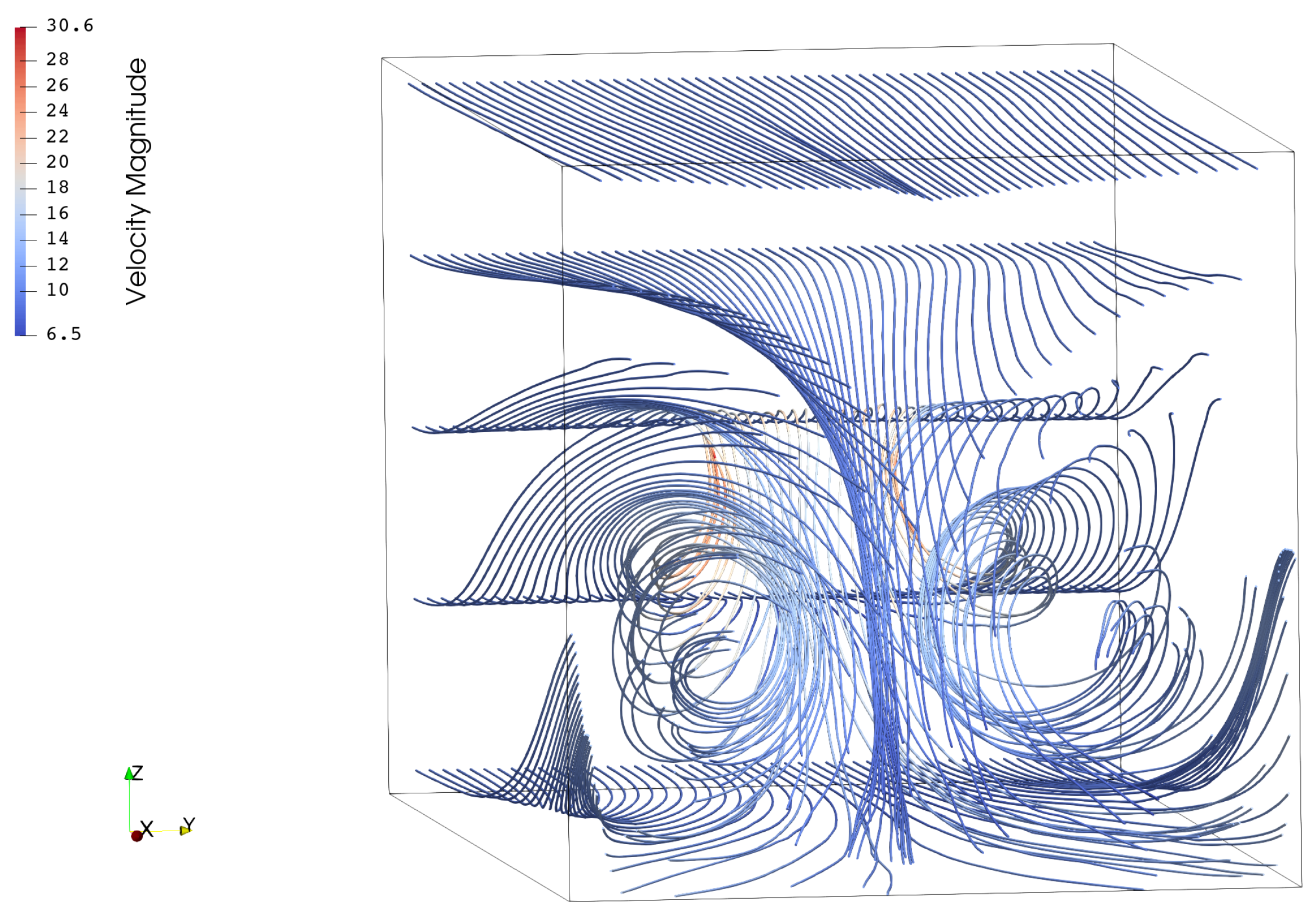
3.3.1. A Climbing Rotor
3.3.2. A Rotor in Forward Flight
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations and Nomenclature
| CFD | Computational Fluid Dynamics |
| FD | Finite Difference |
| FV | Finite Volume |
| FE | Finite Element |
| DG | Discontinuous Galerkin |
| RK | Runge–Kutta |
| TVD | Total Variation Diminishing |
| SSP | Strong Stability Preserving |
| ENO | Essentially Non-Oscillatory |
| WENO | Weighted ENO |
| partial derivative with respect to | |
| angle of attack | |
| heat capacity ratio of the gas | |
| outer normal vector at some point on | |
| tangential vectors at some point on | |
| density of the gas | |
| k-th function in an orthonormal basis | |
| an arbitrary test function | |
| approximation of | |
| projection of on | |
| Jacobian of with respect to | |
| body force per unit length | |
| body force per unit volume | |
| -component of body force per unit volume | |
| c | chord length of a blade |
| and | i-th element (cell) and its boundary |
| specific total energy of the gas | |
| flux vector whose components are matrices | |
| projection of on | |
| -component of | |
| specific total enthalpy of the gas | |
| p | pressure of the gas |
| column matrix of source terms | |
| changing rate of | |
| matrix whose j-th column is the j-th eigenvector of | |
| column matrix of conservative variables | |
| and | approximation of and its WENO reconstruction |
| WENO reconstruction of on with the help of | |
| coefficient matrix whose k-th column is | |
| projection of on | |
| and | and at the n-th time step |
| -component of velocity | |
| column matrix of characteristic variables | |
| and | approximation of and its WENO reconstruction |
References
- Harten, A.; Lax, P.D.; van Leer, B. On Upstream Differencing and Godunov-Type Schemes for Hyperbolic Conservation Laws. SIAM Rev. 1983, 25, 35–61. [Google Scholar] [CrossRef]
- Reed, W.H.; Hill, T.R. Triangular Mesh Methods for the Neutron Transport Equation; Technical Report LA-UR-73-479; Los Alamos Scientific Lab.: Los Alamos, MN, USA, 1973.
- Chavent, G.; Salzano, G. A finite-element method for the 1-D water flooding problem with gravity. J. Comput. Phys. 1982, 45, 307–344. [Google Scholar] [CrossRef]
- Cockburn, B.; Shu, C.W. The Runge-Kutta local projection P1-discontinuous-Galerkin finite element method for scalar conservation laws. In Proceedings of the 1st National Fluid Dynamics Conference, Cincinnati, OH, USA, 25–28 July 1988; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1988. [Google Scholar] [CrossRef] [Green Version]
- Shu, C.W.; Osher, S. Efficient implementation of essentially non-oscillatory shock-capturing schemes. J. Comput. Phys. 1988, 77, 439–471. [Google Scholar] [CrossRef] [Green Version]
- Shu, C.W.; Osher, S. Efficient implementation of essentially non-oscillatory shock-capturing schemes, II. J. Comput. Phys. 1989, 83, 32–78. [Google Scholar] [CrossRef]
- Cockburn, B.; Lin, S.Y.; Shu, C.W. TVB Runge-Kutta local projection discontinuous Galerkin finite element method for conservation laws III: One-dimensional systems. J. Comput. Phys. 1989, 84, 90–113. [Google Scholar] [CrossRef] [Green Version]
- Cockburn, B.; Hou, S.; Shu, C.W. The Runge-Kutta local projection discontinuous Galerkin finite element method for conservation laws. IV. The multidimensional case. Math. Comput. 1990, 54, 545–581. [Google Scholar] [CrossRef] [Green Version]
- Cockburn, B.; Shu, C.W. The Runge–Kutta Discontinuous Galerkin Method for Conservation Laws V: Multidimensional Systems. J. Comput. Phys. 1998, 141, 199–224. [Google Scholar] [CrossRef]
- Gottlieb, D.; Shu, C.W. On the Gibbs Phenomenon and Its Resolution. SIAM Rev. 1997, 39, 644–668. [Google Scholar] [CrossRef] [Green Version]
- Sweby, P.K. High Resolution Schemes Using Flux Limiters for Hyperbolic Conservation Laws. SIAM J. Numer. Anal. 1984, 21, 995–1011. [Google Scholar] [CrossRef]
- Harten, A.; Engquist, B.; Osher, S.; Chakravarthy, S.R. Uniformly High Order Accurate Essentially Non-oscillatory Schemes, III. J. Comput. Phys. 1997, 131, 3–47. [Google Scholar] [CrossRef]
- Jiang, G.S.; Shu, C.W. Efficient Implementation of Weighted ENO Schemes. J. Comput. Phys. 1996, 126, 202–228. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.; Shu, C.W. Weighted Essentially Non-oscillatory Schemes on Triangular Meshes. J. Comput. Phys. 1999, 150, 97–127. [Google Scholar] [CrossRef] [Green Version]
- Qiu, J.; Shu, C.W. Runge–Kutta Discontinuous Galerkin Method Using WENO Limiters. SIAM J. Sci. Comput. 2005, 26, 907–929. [Google Scholar] [CrossRef]
- Zhu, J.; Qiu, J.; Shu, C.W.; Dumbser, M. Runge–Kutta discontinuous Galerkin method using WENO limiters II: Unstructured meshes. J. Comput. Phys. 2008, 227, 4330–4353. [Google Scholar] [CrossRef]
- Zhong, X.; Shu, C.W. A simple weighted essentially nonoscillatory limiter for Runge–Kutta discontinuous Galerkin methods. J. Comput. Phys. 2013, 232, 397–415. [Google Scholar] [CrossRef]
- Zhu, J.; Zhong, X.; Shu, C.W.; Qiu, J. Runge–Kutta discontinuous Galerkin method using a new type of WENO limiters on unstructured meshes. J. Comput. Phys. 2013, 248, 200–220. [Google Scholar] [CrossRef]
- Pei, W.; Jiang, Y.; Li, S. An Efficient Parallel Implementation of the Runge–Kutta Discontinuous Galerkin Method with Weighted Essentially Non-Oscillatory Limiters on Three-Dimensional Unstructured Meshes. Appl. Sci. 2022, 12, 4228. [Google Scholar] [CrossRef]
- Rajagopalan, R.G.; Mathur, S.R. Three dimensional analysis of a rotor in forward flight. In Proceedings of the 20th Fluid Dynamics, Plasma Dynamics and Lasers Conference, Buffalo, NY, USA, 12–14 July 1989; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1989. [Google Scholar] [CrossRef]
- Rajagopalan, R.G.; Mathur, S.R. Three Dimensional Analysis of a Rotor in Forward Flight. J. Am. Helicopter Soc. 1993, 38, 14–25. [Google Scholar] [CrossRef] [Green Version]
- Kang, N.; Sun, M. Technical Note: Prediction of the Flow Field of a Rotor in Ground Effect. J. Am. Helicopter Soc. 1997, 42, 195–198. [Google Scholar] [CrossRef]
- Kang, N.; Sun, M. Simulated Flowfields in Near-Ground Operation of Single- and Twin-Rotor Configurations. J. Aircr. 2000, 37, 214–220. [Google Scholar] [CrossRef]
- Shi, Y.; Xu, Y.; Zong, K.; Xu, G. An investigation of coupling ship/rotor flowfield using steady and unsteady rotor methods. Eng. Appl. Comput. Fluid Mech. 2017, 11, 417–434. [Google Scholar] [CrossRef] [Green Version]
- Shen, W.Z.; Zhang, J.H.; Sørensen, J.N. The Actuator Surface Model: A New Navier–Stokes Based Model for Rotor Computations. J. Sol. Energy Eng. 2009, 131, 011002. [Google Scholar] [CrossRef]
- Kim, T.; Oh, S.; Yee, K. Improved actuator surface method for wind turbine application. Renew. Energy 2015, 76, 16–26. [Google Scholar] [CrossRef]
- Toro, E.F. Riemann Solvers and Numerical Methods for Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Zhang, L.; Cui, T.; Liu, H. A Set of Symmetric Quadrature Rules on Triangles and Tetrahedra. J. Comput. Math. 2009, 27, 89–96. [Google Scholar]
- Gottlieb, S.; Shu, C.W. Total variation diminishing Runge-Kutta schemes. Math. Comput. 1998, 67, 73–85. [Google Scholar] [CrossRef] [Green Version]
- Gottlieb, S.; Shu, C.W.; Tadmor, E. Strong Stability-Preserving High-Order Time Discretization Methods. SIAM Rev. 2001, 43, 89–112. [Google Scholar] [CrossRef]
- Woodward, P.; Colella, P. The numerical simulation of two-dimensional fluid flow with strong shocks. J. Comput. Phys. 1984, 54, 115–173. [Google Scholar] [CrossRef]
- Karypis, G.; Kumar, V. A Fast and High Quality Multilevel Scheme for Partitioning Irregular Graphs. SIAM J. Sci. Comput. 1998, 20, 359–392. [Google Scholar] [CrossRef]





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h | p | #Cells | #Steps | Time Cost | File Size |
|---|---|---|---|---|---|
| 1/50 | 1 | 2,469,675 | 1500 | 1492.16 s | 1.23 GB |
| 1/18 | 2 | 117045 | 500 | 279.119 s | 213 MB |
| 1/10 | 3 | 19,815 | 250 | 201.034 s | 89.1 MB |
| P | |||||
|---|---|---|---|---|---|
| 1 | 10,511.3 | 42,466.5 | 42,593.0 | 106.873 | 106.939 |
| 5 | 2389.25 | 9740.13 | 9769.96 | 122.925 | 123.012 |
| 10 | 1246.37 | 5086.62 | 5101.95 | 128.436 | 128.519 |
| 15 | 839.554 | 3420.17 | 3430.75 | 129.462 | 129.560 |
| 20 | 645.737 | 2632.32 | 2640.57 | 132.882 | 132.989 |
| 40 | 325.269 | 1310.72 | 1319.73 | 131.833 | 132.595 |
| 60 | 222.890 | 923.043 | 931.754 | 140.499 | 141.773 |
| 80 | 168.862 | 672.439 | 681.445 | 134.736 | 136.689 |
| 100 | 137.787 | 543.081 | 552.682 | 135.550 | 138.298 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pei, W.; Jiang, Y.; Li, S. High-Order CFD Solvers on Three-Dimensional Unstructured Meshes: Parallel Implementation of RKDG Method with WENO Limiter and Momentum Sources. Aerospace 2022, 9, 372. https://doi.org/10.3390/aerospace9070372
Pei W, Jiang Y, Li S. High-Order CFD Solvers on Three-Dimensional Unstructured Meshes: Parallel Implementation of RKDG Method with WENO Limiter and Momentum Sources. Aerospace. 2022; 9(7):372. https://doi.org/10.3390/aerospace9070372
Chicago/Turabian StylePei, Weicheng, Yuyan Jiang, and Shu Li. 2022. "High-Order CFD Solvers on Three-Dimensional Unstructured Meshes: Parallel Implementation of RKDG Method with WENO Limiter and Momentum Sources" Aerospace 9, no. 7: 372. https://doi.org/10.3390/aerospace9070372