
Automatic Balancing for Satellite Simulators with Mixed Mechanical and Magnetic Actuation



Abstract
:1. Introduction
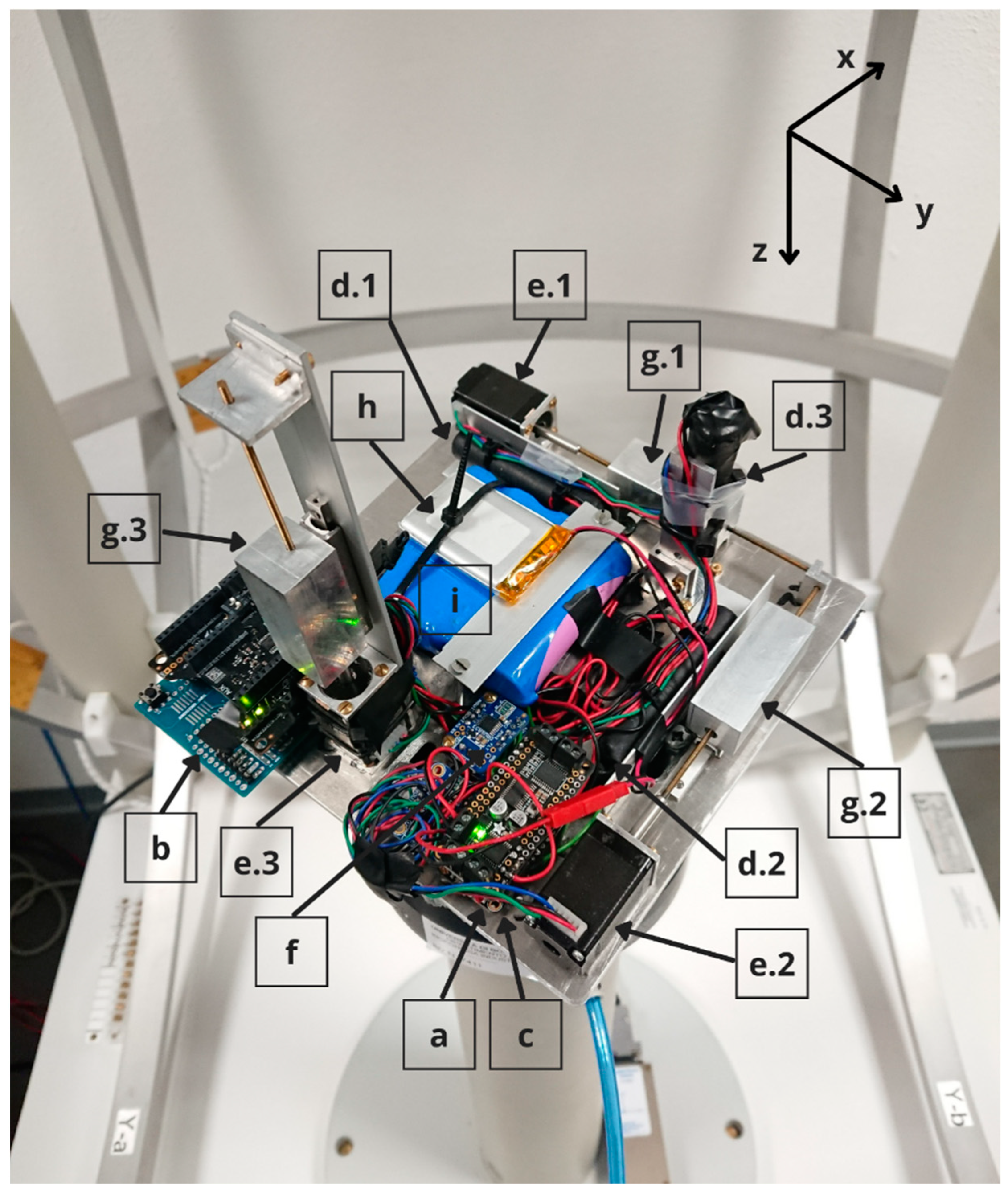
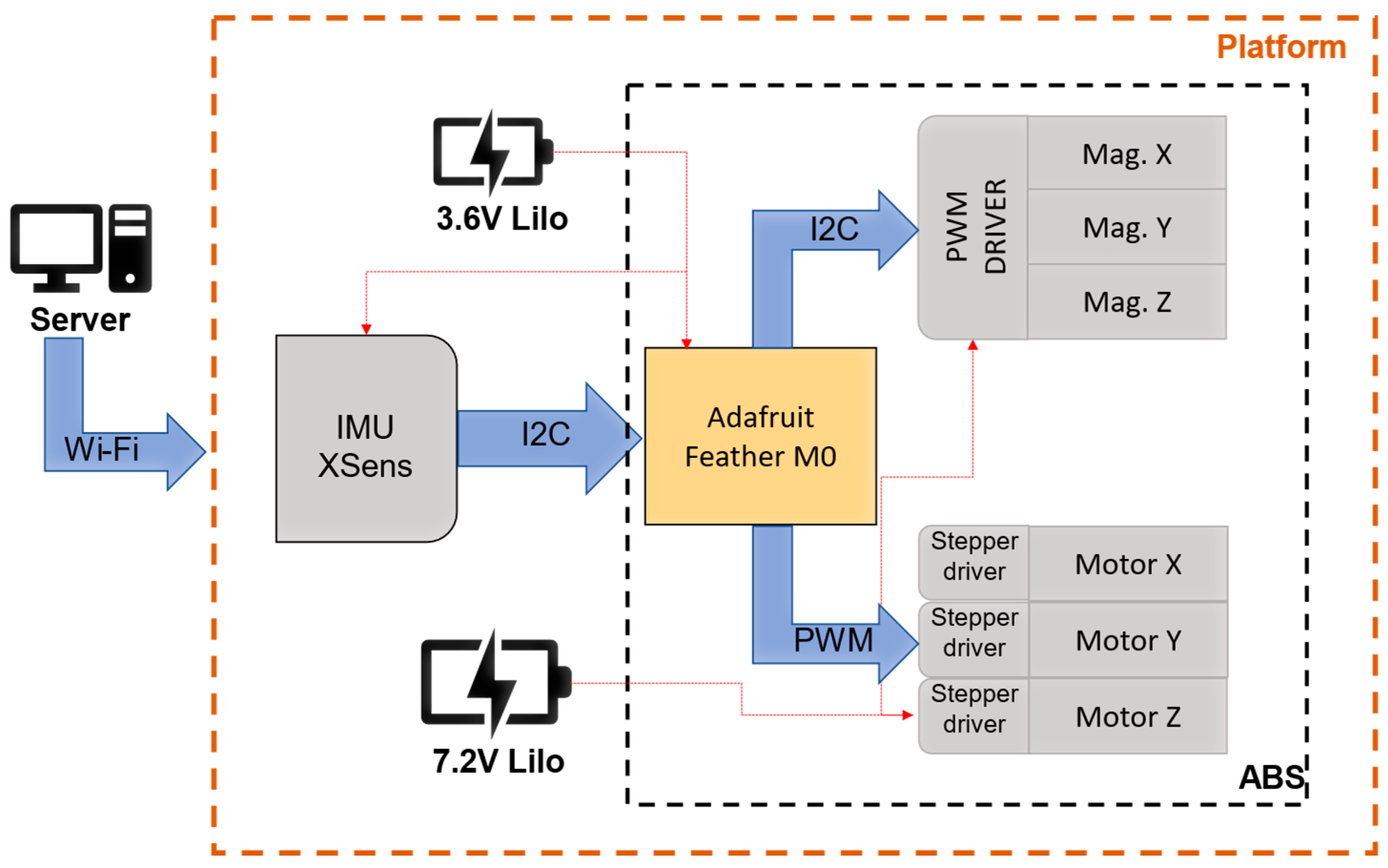
2. Materials and Methods
Mathematical Model for ABS
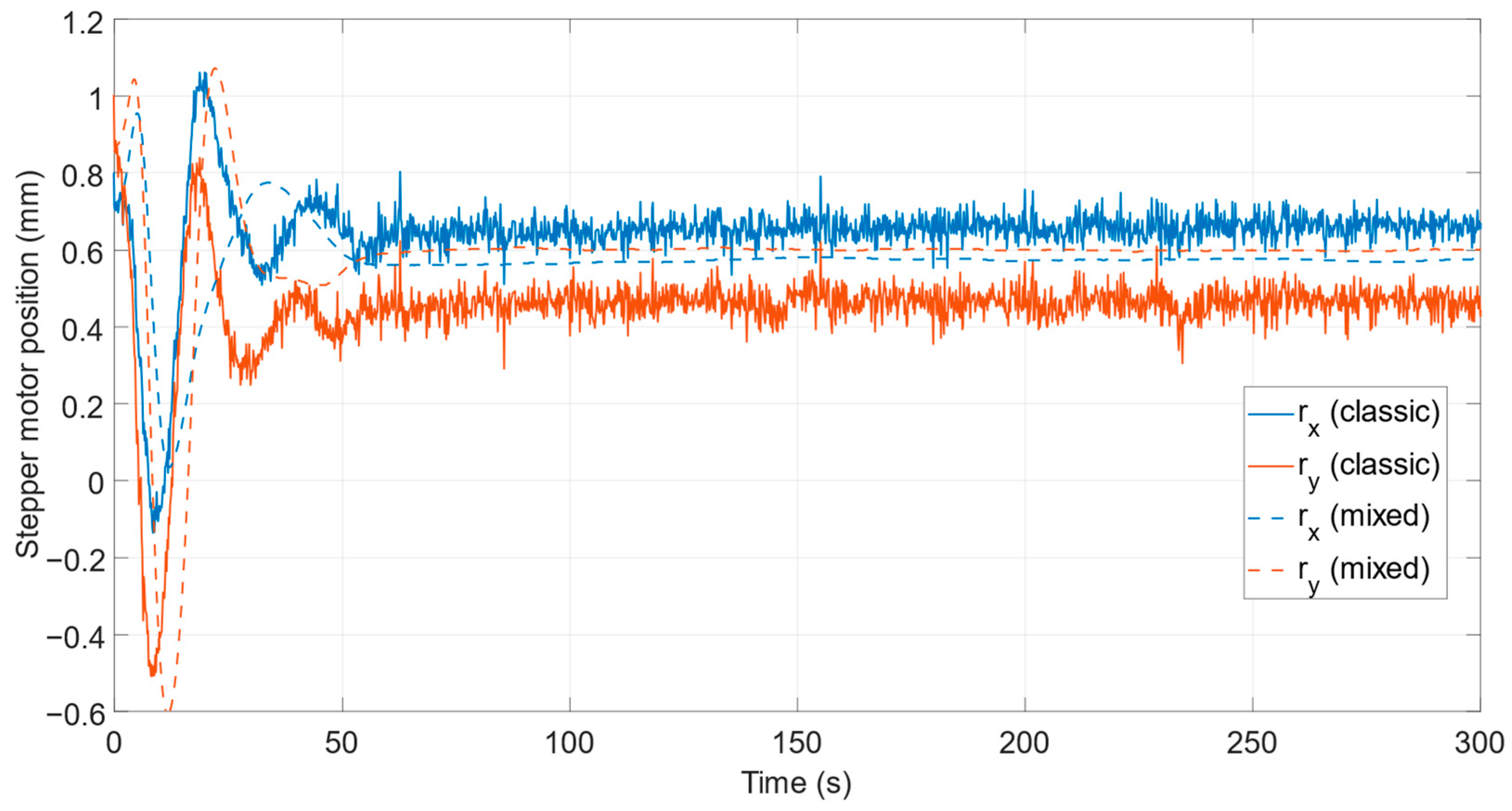
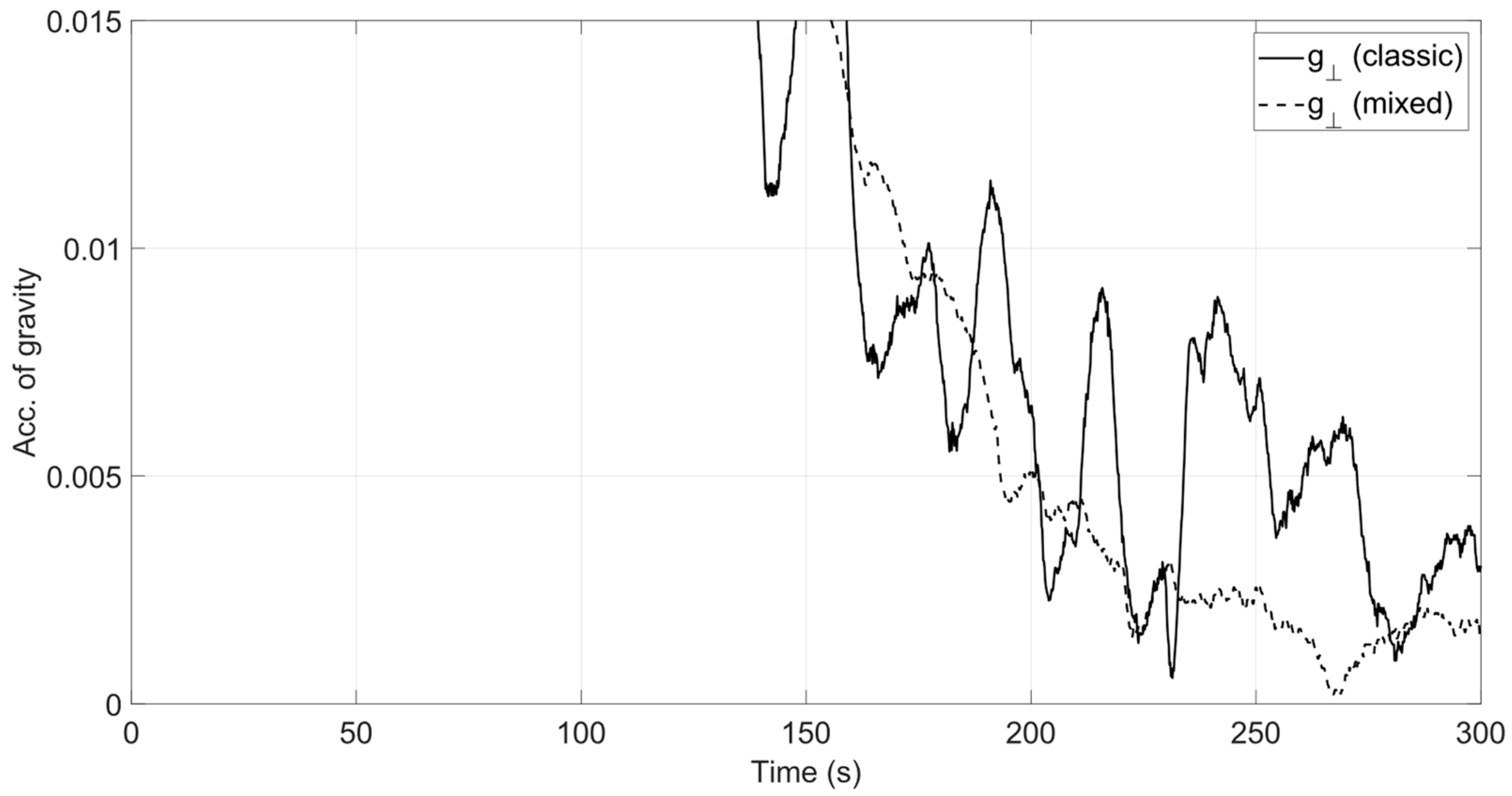
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schwartz, J.L.; Peck, M.A.; Hall, C.D. Historical Review of Air-Bearing Spacecraft Simulators. J. Guid. Control Dyn. 2003, 26, 513–522. [Google Scholar] [CrossRef] [Green Version]
- Karpenko, S.O.; Ovchinnikov, M.Y. Laboratory Facility for Testing of Micro- and Nanosatellite Attitude Control Systems. Keldysh Inst. Prepr. 2008, 38, 1–32. [Google Scholar]
- Kwan, T.H.; Lee, K.M.B.; Yan, J.; Wu, X. An Air Bearing Table for Satellite Attitude Control Simulation. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 1420–1425. [Google Scholar]
- Fullmer, R. Dynamic Ground Testing of the Skipper Attitude Control System. In Proceedings of the 34th Aerospace Sciences Meeting and Exhibit, Aerospace Sciences Meetings, Reno, NV, USA, 15−18 January 1996; American Institute of Aeronautics and Astronautics: Virginia Reston, VA, USA, 1996. [Google Scholar]
- Da Silva, R.C.; Guimarães, F.C.; De Loiola, J.V.L.; Borges, R.A.; Battistini, S.; Cappelletti, C. Tabletop Testbed for Attitude Determination and Control of Nanosatellites. J. Aerosp. Eng. 2019, 32, 04018122. [Google Scholar] [CrossRef] [Green Version]
- Young, J. Balancing of a small satellite attitude control simulator on an air bearing. In Proceedings of the Utah Space Grant Consortium Symposium, Salt Lake City, UT, USA, 19 June 1998; pp. 1–7. [Google Scholar]
- Schwartz, J.L.; Hall, C.D. System Identification of a Spherical Air-Bearing Spacecraft Simulator. In Proceedings of the AAS/AIAA Space Flight Mechanics Conference, No. AAS 04-122, Maui, HI, USA, 8–12 February 2004. [Google Scholar]
- Schwartz, J.L.; Hall, C.D. Comparison of system identification techniques for a spherical air-bearing spacecraft simulator. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Ponce, Puerto Rico, 9–13 February 2003. [Google Scholar]
- Thomas, D.; Wolosik, A.T.; Black, J. CubeSat Attitude Control Simulator Design. In Proceedings of the 2018 AIAA Modeling and Simulation Technologies Conference, Kissimmee, FL, USA, 8–12 January 2018; American Institute of Aeronautics and Astronautics: Virginia Reston, VA, USA, 2018. [Google Scholar]
- Gavrilovich, I.; Krut, S.; Gouttefarde, M.; Pierrot, F.; Dusseau, L. Robotic Test Bench for CubeSat Ground Testing: Concept and Satellite Dynamic Parameter Identification. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 5447–5453. [Google Scholar]
- Prado, J.; Bisiacchi, G.; Reyes, L.; Vicente, E.; Contreras, F.; Mesinas, M.; Juárez, A. Three-axis air-bearing based platform for small satellite attitude determination and control simulation. J. Appl. Res. Technol. 2005, 3, 222–237. [Google Scholar] [CrossRef]
- Chesi, S.; Gong, Q.; Pellegrini, V.; Cristi, R.; Romano, M. Automatic Mass Balancing of a Spacecraft Three-Axis Simulator: Analysis and Experimentation. J. Guid. Control Dyn. 2014, 37, 197–206. [Google Scholar] [CrossRef] [Green Version]
- Bahu, A.; Modenini, D. Automatic mass balancing system for a dynamic CubeSat attitude simulator: Development and experimental validation. CEAS Space J. 2020, 12, 597–611. [Google Scholar] [CrossRef]
- Bahu, A.; Modenini, D. On-ground experimental verification of magnetic attitude control for nanosatellites. In Proceedings of the 2021 IEEE 8th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Naples, Italy, 23–25 June 2021; pp. 568–573. [Google Scholar] [CrossRef]
- Keim, J.A.; Açıkmeşe, B.; Shields, J. Spacecraft inertia estimation via constrained least squares. In Proceedings of the 2006 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2006. [Google Scholar] [CrossRef]
- Kim, D.-H.; Choi, D.-G.; Oh, H.-S. Inertia Estimation of Spacecraft Based on Modified Law of Conservation of Angular Momentum. J. Astron. Space Sci. 2010, 27, 353–357. [Google Scholar] [CrossRef]
- Kim, D.; Yang, S.; Lee, S. Rigid body inertia estimation using extended Kalman and Savitzky–Golay filters. Math. Probl. Eng. 2016, 2016, 2962671. [Google Scholar] [CrossRef]
- Bellar, A.; Mohammed, M.A.S. Satellite Inertia Parameters Estimation Based on Extended Kalman Filter. J. Aerosp. Technol. Manag. 2019, 11, 1619. [Google Scholar] [CrossRef]
- Liu, Y.; Li, L.; Fu, Z.; Tan, J.; Li, K. Automatic Mass Balancing of a Spacecraft Simulator Based on Non-Orthogonal Structure. In Proceedings of the 2016 UKACC 11th International Conference on Control (CONTROL), Belfast, UK, 31 August–2 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Hua, B.; Chen, L.; Wu, Y.; Chen, Z. A study of PID and L1 adaptive control for automatic balancing of a spacecraft three-axis simulator. Int. J. Intell. Comput. Cybern. 2018, 11, 269–284. [Google Scholar] [CrossRef]
- Sharifi, G.; Mirshams, M.; Ousaloo, H.S. Mass properties identification and automatic mass balancing system for satellite attitude dynamics simulator. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017, 233, 896–907. [Google Scholar] [CrossRef]
- Ousaloo, H.S.; Sharifi, G.; Akbarinia, B. Extended validation of a ground-based three-axis spacecraft simulator model. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021, 235, 151–170. [Google Scholar] [CrossRef]
- da Silva, R.C.; Borges, R.A.; Battistini, S.; Cappelletti, C. A review of balancing methods for satellite simulators. Acta Astronaut. 2021, 187, 537–545. [Google Scholar] [CrossRef]
- De Ruiter, A.H.J.; Damaren, C.; Forbes, J.R. Spacecraft Dynamics and Control: An Introduction; Wiley: Chichester, UK, 2013; ISBN 978-1-118-40332-7. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mechanical | Mechanical/Magnetic | |
|---|---|---|
| Initial offset (mm) | −0.5 | −0.5 |
| Initial angular rate | Null | Null |
| Proportional gain Kp (Nm) | 1 × 10−3 | 1 × 10−3 |
| Derivative gain Kd (Nm∙s) | 1.8 × 10−3 | 1.8 × 10−3 |
| Integral gain KdKi (Nm/s) | 2 × 10−5 | 2 × 10−5 |
| No. of tests | 4 | 4 |
| steady rms value (-) | 3.74 × 10−3 | 2.15 × 10−3 |
| steady rms value (-) | 5.31 × 10−3 | 1.54 × 10−3 |
| steady rms value (-) | 6.49 × 10−3 | 2.64 × 10−3 |
| peak-to-peak (mm) | 0.178 | 0.014 |
| peak-to-peak (mm) | 0.202 | 0.010 |
| standard dev. (mm) | 0.026 | 0.004 |
| standard dev. (mm) | 0.030 | 0.002 |
| Res. Torque (Nm) | 8.3 × 10−5 | 6.8 × 10−5 |
| Mechanical | Mechanical/Magnetic | |
| Initial offset (mm) | 0.5 | 0.5 |
| Initial angular rate | Null | null |
| Proportional gain Kp (Nm) | 1 × 10−3 | 1 × 10−3 |
| Derivative gain Kd (Nm∙s) | 1.8 × 10−3 | 1.8 × 10−3 |
| Integral gain KdKi (Nm/s) | 2 × 10−5 | 2 × 10−5 |
| No. of tests | 4 | 4 |
| steady rms value (-) | 2.44 × 10−3 | 1.54 × 10−3 |
| steady rms value (-) | 3.87 × 10−3 | 2.71 × 10−3 |
| steady rms value (-) | 4.57 × 10−3 | 3.12 × 10−3 |
| peak-to-peak (mm) | 0.142 | 0.020 |
| peak-to-peak (mm) | 0.148 | 0.012 |
| standard dev. (mm) | 0.022 | 0.004 |
| standard dev. (mm) | 0.024 | 0.004 |
| Res. Torque (Nm) | 7.9 × 10−5 | 7.1 × 10−5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Curatolo, A.; Bahu, A.; Modenini, D. Automatic Balancing for Satellite Simulators with Mixed Mechanical and Magnetic Actuation. Aerospace 2022, 9, 223. https://doi.org/10.3390/aerospace9040223
Curatolo A, Bahu A, Modenini D. Automatic Balancing for Satellite Simulators with Mixed Mechanical and Magnetic Actuation. Aerospace. 2022; 9(4):223. https://doi.org/10.3390/aerospace9040223
Chicago/Turabian StyleCuratolo, Andrea, Anton Bahu, and Dario Modenini. 2022. "Automatic Balancing for Satellite Simulators with Mixed Mechanical and Magnetic Actuation" Aerospace 9, no. 4: 223. https://doi.org/10.3390/aerospace9040223