
Feasibility Study of Electrified Light-Sport Aircraft Powertrains †

Abstract
:1. Introduction
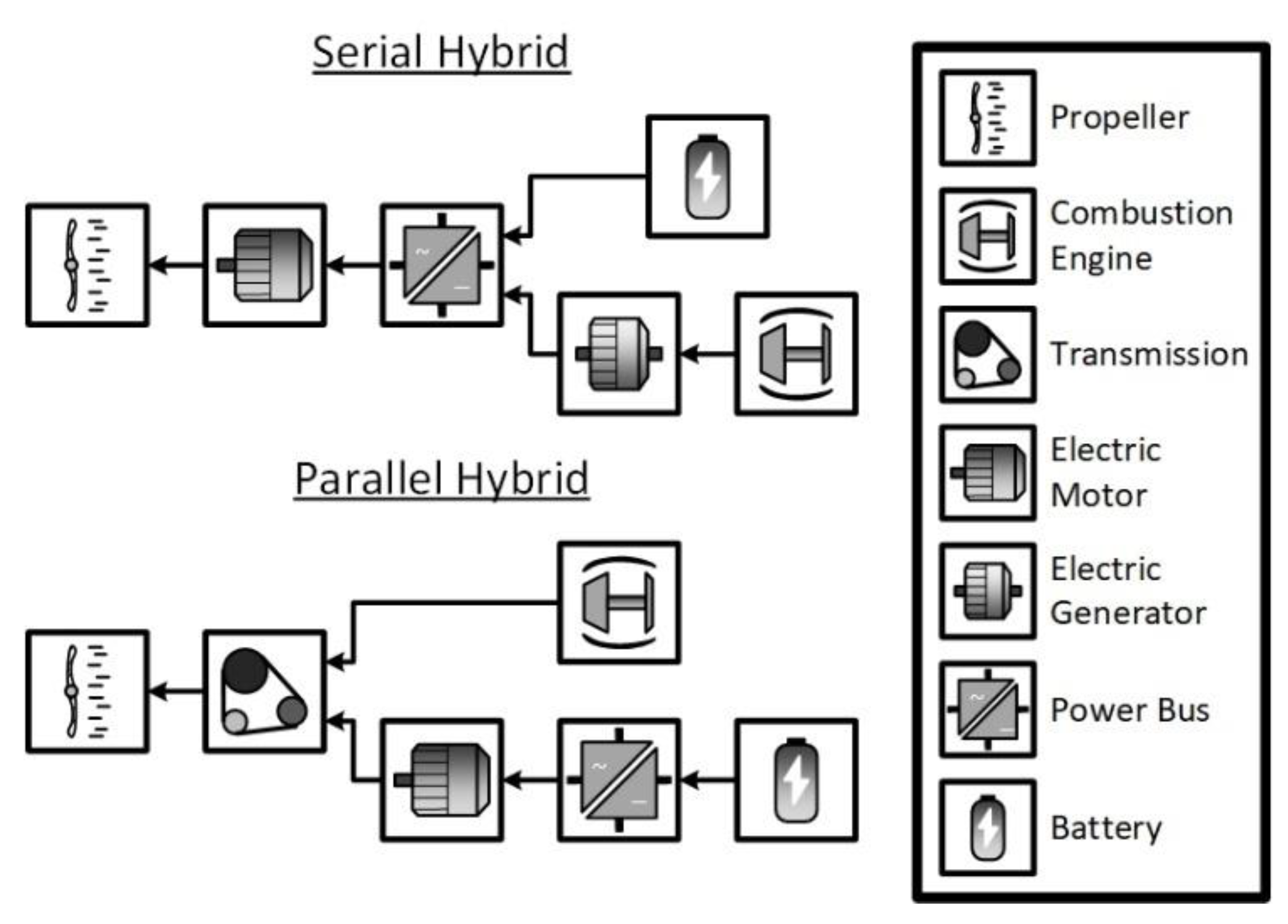
1.1. Overview of Hybrid Electric Propulsion
1.2. Research Objectives
2. Methods
2.1. Reference Aircraft
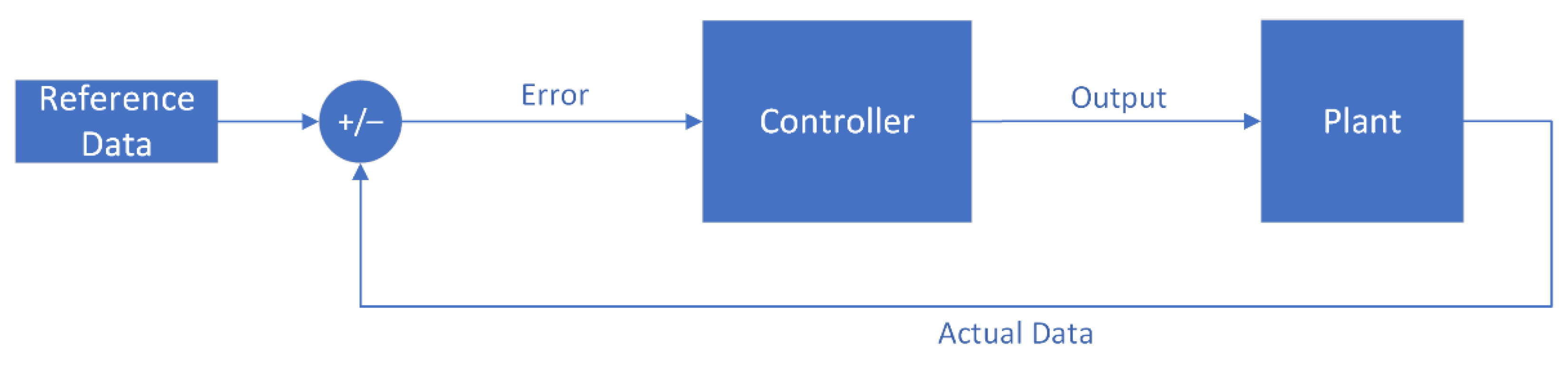
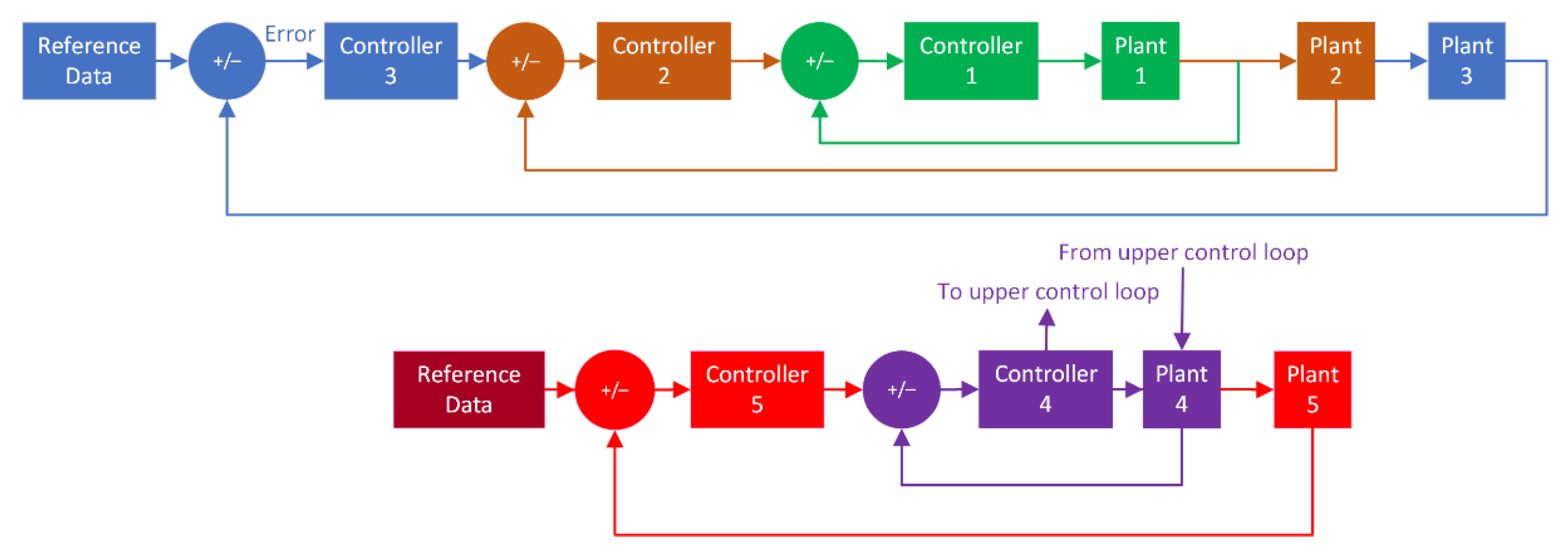
2.2. Aircraft Modelling
2.2.1. Control Loop 1: Motor Torque
2.2.2. Control Loop 2: Propeller Angular Speed
2.2.3. Control Loop 3: Aircraft Thrust
2.2.4. Control Loop 4: Climb/Descent Angle
2.2.5. Control Loop 5: Vertical Velocity
2.3. Powertrain Energy Distributions
2.4. Variable Cruise Algorithm
2.5. Aircraft Mass Analysis
2.6. Simulation Parameters
- Takeoff and initial climb to 152.4 m (500 ft) at 100% power.
- Continued climb at the best rate of climb until the desired cruising altitude is reached.
- Cruise at a constant true airspeed of 246 km/h.
- Descending flight (maintaining cruise speed) at a constant descending rate.
- Approach and landing.
3. Results and Discussion
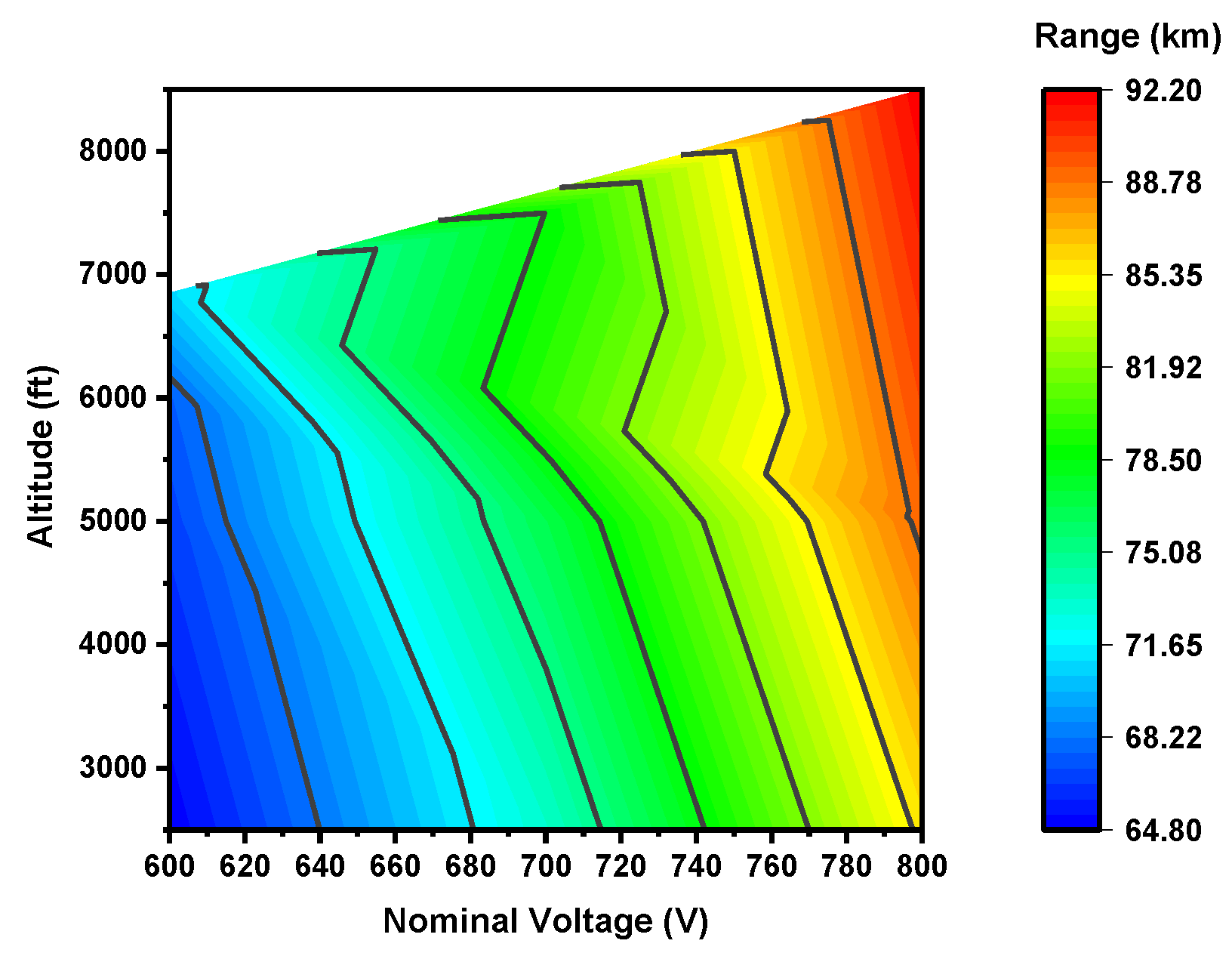
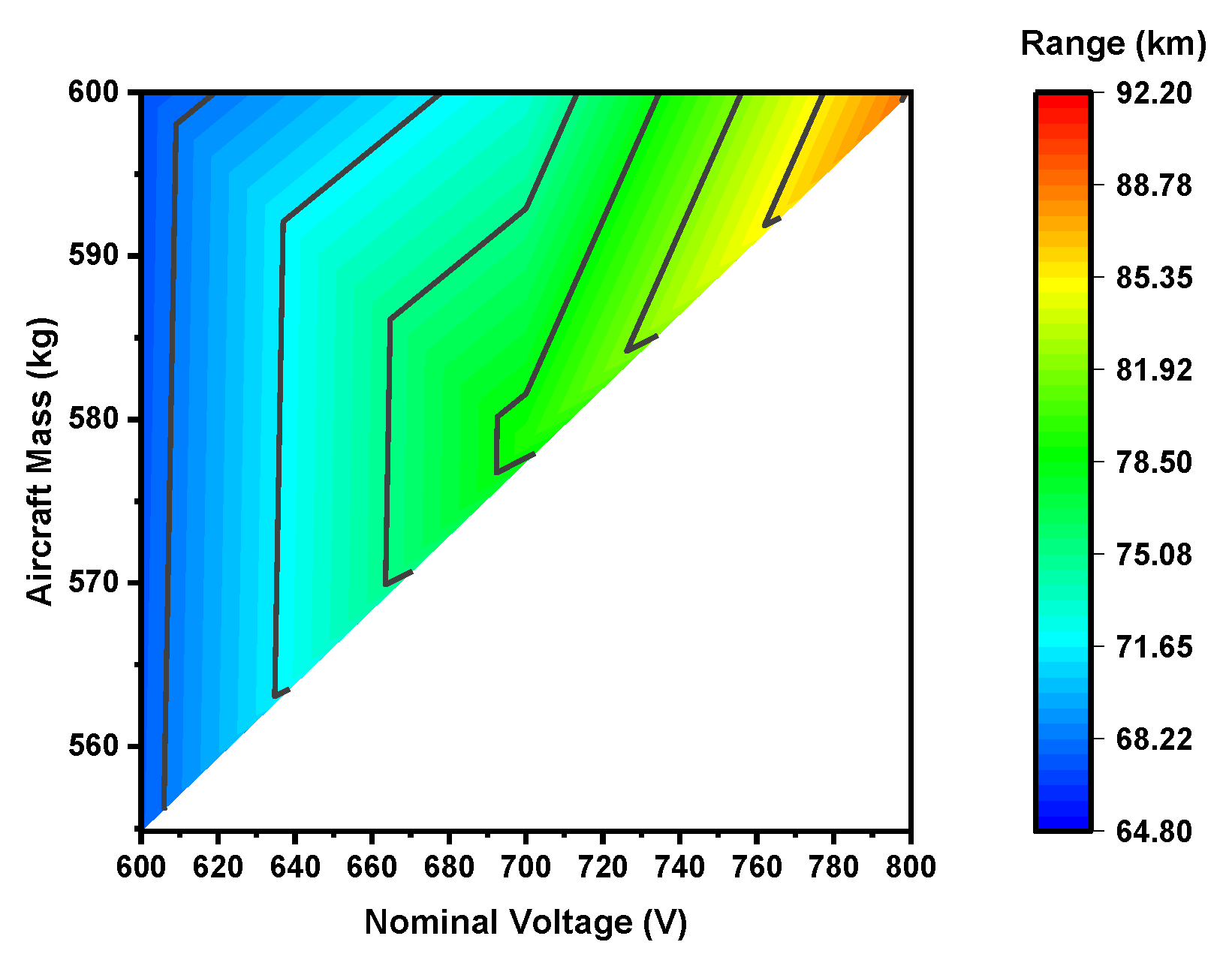
3.1. Fully Electric Simulation Results
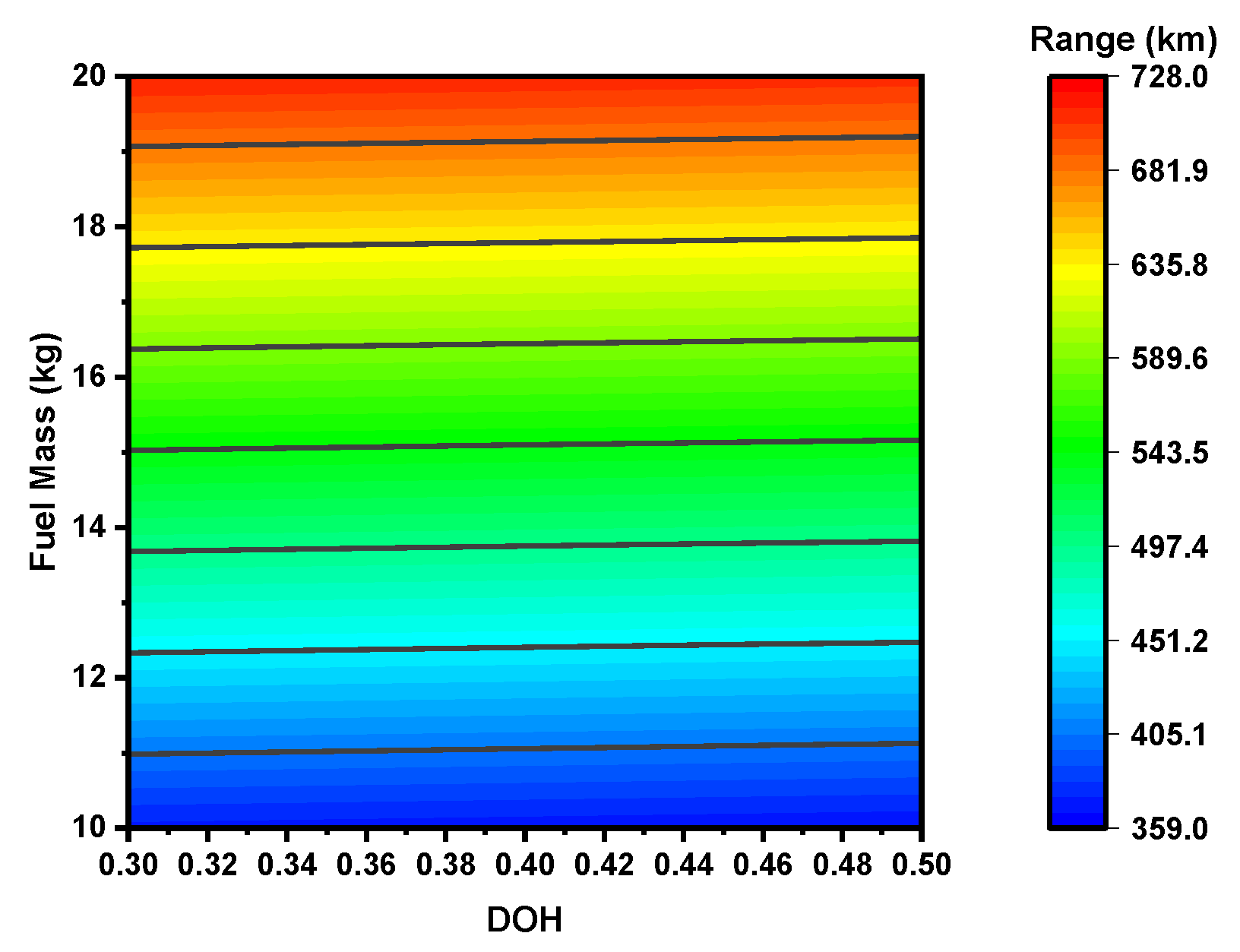
3.2. Hybrid Electric Results (ICE-Only Cruise)
3.3. Hybrid Electric Results (Total Mission Hybridization)
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Energy Agency (IEA). World Energy Outlook 2020—Executive Summary. In World Energy Outlook 2020; OECD Publishing: Paris, France, 2020. [Google Scholar]
- Klauke, S.; Hussain, N.; Stoufflet, B.; Lorence, C.; Preli, F.; Stein, P.; Dalbies, E. The Sustainability of Aviation—A Statement of the Chief Technology Officers of Seven of the World’s Major Aviation Manufacturers; Dassault Aviation: London, UK, 2021. [Google Scholar]
- US Environmental Protection Agency. Control of air pollution from aircraft and aircraft engines: GHG emission standards and test procedures. In Federal Register EPA-HQ-OAR-2018-0276; Federal Register: Washington, DC, USA, 2021; Volume 86, pp. 2136–2174. [Google Scholar]
- Government of Canada. Regulations amending the Canadian Aviation Regulations (CO2 emissions): SOR/2020-251. In Canada Gazette, Part II; Canada Gazette: Ottawa, ON, Canada, 2020; Volume 154. [Google Scholar]
- Overton, J. Fact Sheet: The Growth in Greenhouse Gas Emissions from Commercial Aviation—Part 1 of a Series on Airlines and Climate Change; Environmental and Energy Study Institute: Washington, DC, USA, 2019. [Google Scholar]
- The Boeing Company. Boeing Commercial Market Outlook 2019–2038. 2019. Available online: https://invest-india-revamp-static-files.s3.ap-south-1.amazonaws.com/s3fs-public/2019-12/cmo-sept-2019-report-final.pdf (accessed on 17 September 2021).
- Statista. Worldwide Air Freight Traffic from 2004 to 2021. Available online: https://www.statista.com/statistics/564658/worldwide-revenue-of-air-cargo-traffic/ (accessed on 14 April 2022).
- Lee, D.S.; Fahey, D.W.; Forster, P.M.; Newton, P.J.; Wit, R.C.N.; Lim, L.L.; Owen, B.; Sausen, R. Aviation and global climate change in the 21st century. Atmos. Environ. 2009, 43, 3520–3537. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hansen, J.; Nazarenko, L. Soot climate forcing via snow and ice albedos. Proc. Natl. Acad. Sci. USA 2004, 101, 423–428. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brelje, B.J.; Martins, J.R. Electric, hybrid, and turboelectric fixed-wing aircraft: A review of concepts, models, and design approaches. Prog. Aerosp. Sci. 2019, 104, 1–19. [Google Scholar] [CrossRef]
- Pornet, C.; Isikveren, A. Conceptual design of hybrid-electric transport aircraft. Prog. Aerosp. Sci. 2015, 79, 114–135. [Google Scholar] [CrossRef]
- Friedrich, C.; Robertson, P. Hybrid-Electric Propulsion for Aircraft. J. Aircr. 2015, 52, 176–189. [Google Scholar] [CrossRef]
- Sliwinski, J.; Gardi, A.; Marino, M.; Sabatini, R. Hybrid-electric propulsion integration in unmanned aircraft. Energy 2017, 140, 1407–1416. [Google Scholar] [CrossRef]
- Hiserote, R.; Harmon, F. Analysis of Hybrid-Electric Propulsion System Designs for Small Unmanned Aircraft Systems. In Proceedings of the 8th Annual International Energy Conversion Engineering Conference, Nashville, TN, USA, 25–28 July 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Xie, Y.; Savvarisal, A.; Tsourdos, A.; Zhang, D.; Gu, J. Review of hybrid electric powered aircraft, its conceptual design and energy management methodologies. Chin. J. Aeronaut. 2021, 34, 432–450. [Google Scholar] [CrossRef]
- Finger, D.F.; Braun, C.; Bil, C. Comparative Assessment of Parallel-Hybrid-Electric Propulsion Systems for Four Different Aircraft. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Ludowicy, C.B.J.; Rings, R.; Finger, D.F. Sizing Studies of Light Aircraft with Serial Hybrid Propulsion Systems. In Proceedings of the Deutscher Luft- und Raumfahrtkongress 2018, Friedrichshafen, Germany, 4–6 September 2018. [Google Scholar]
- Hung, J.; Gonzalez, F. Design, simulation and analysis of a parallel hybrid electric propulsion system for unmanned aerial vehicles. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012; pp. 1–7. [Google Scholar]
- Stoll, A.M.; Bevirt, J.B.; Moore, M.D.; Fredericks, W.J.; Borer, N.K. Drag reduction through distributed electric propulsion. In Proceedings of the 14th AIAA Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 16–20 June 2014; pp. 16–20. [Google Scholar] [CrossRef] [Green Version]
- Wick, A.T.; Hooker, J.R.; Hardin, C.J.; Zeune, C.H. Integrated aerodynamic benefits of distributed propulsion. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015; pp. 1–36. [Google Scholar] [CrossRef]
- Kreimeier, M.; Stumpf, E. Benefit evaluation of hybrid electric propulsion concepts for CS-23 aircraft. CEAS Aeronaut. J. 2017, 8, 691–704. [Google Scholar] [CrossRef]
- Gladin, J.C.; Trawick, D.; Perullo, C.; Tai, J.C.; Mavris, D.N. Modeling and design of a partially electric distributed aircraft propulsion system with GT-heat. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; pp. 1–18. [Google Scholar]
- Xie, Y.; Savvaris, A.; Tsourdos, A.; Laycock, J.; Farmer, A. Modelling and control of a hybrid electric propulsion system for unmanned aerial vehicles. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–13. [Google Scholar] [CrossRef] [Green Version]
- Boric, M. Hypstair: Most Powerful Hybrid Electric Powertrain Powers Up. 2016. Available online: http://www.hypstair.eu/most-powerful-hybrid-electric-powertrain-powers-up/ (accessed on 28 June 2021).
- Cipolla, V.; Oliviero, F. HyPsim: A simulation tool for hybrid aircraft performance analysis. In Variational Analysis and Aerospace Engineering; Springer: Cham, Germany, 2016. [Google Scholar]
- Pipistrel Virus SW Technical Parameters. Available online: https://www.pipistrel-aircraft.com/aircraft/cruising/virus-sw-80-100-115-is/#tab-id-2 (accessed on 30 April 2021).
- Roskam, J.; Lan, C.E. Airplane Aerodyanmics and Performance; Roskam Aviation and Engineering: Ottawa, ON, Canada, 1980. [Google Scholar]
- Rotax Service Instruction. Propeller Mass Moment of Inertia for ROTAX® Engine Type 916 i (Series), 915 i (Series), 912 i (Series), 912/914 (Series) and 2 Stroke Aircraft Engines. 2021. Available online: https://aircraft.e-props.fr/images/tech/MOI/si-912-034.pdf (accessed on 28 July 2021).
- Biermann, D.; Hartman, E.P. The Aerodynamic Characteristics of Full-Scale Propellers Having 2, 3 and 4 Blades of Clark Y and R.A.F. 6 Airfoil Sections (NACA Technical Report 640); NASA: Langley Field, VA, USA, 1938. [Google Scholar]
- Rodda, E. EV Battery Comparison. In Proceedings of the Meeting of the Australian Electric Vehicle Association, Melbourne, Australia, 15 September 2010; pp. 1–26. [Google Scholar]
- Keil, P.; Jossen, A.; Soc, J.E.; Keil, P. Impact of Dynamic Driving Loads and Regenerative Braking on the Aging of Lithium-Ion Batteries in Electric Vehicles. J. Electrochem. Soc. 2017, 164, A3081. Available online: https://iopscience.iop.org/article/10.1149/2.0801713jes/pdf (accessed on 7 January 2022). [CrossRef]
- Van Oorschot, P.F.; Besselink, I.J.M.; Meinders, E.; Nijmeijer, H. Realization and control of the lupo EL electric vehicle. World Electr. Veh. J. 2012, 5, 14–23. [Google Scholar] [CrossRef] [Green Version]
- Rotax. Rotax 912is (100 HP) Specifications. Available online: https://www.flyrotax.com/produkte/detail/rotax-912-is-isc-sport-2.html (accessed on 25 May 2021).
- Smil, V. Gas Turbines Have Become by Far the Best Choice for Add-on Generating Power. IEEE Spectr. 2019. Available online: https://spectrum.ieee.org/energy/fossil-fuels/gas-turbines-have-become-by-far-the-best-choice-for-addon-generating-power (accessed on 28 October 2021).
- Idaho National Laboratory. Battery Pack Laboratory Testing Results—Ford Focus Hatchback—VIN 1700. Available online: https://avt.inl.gov/sites/default/files/pdf/fsev/batteryFocus1700.pdf (accessed on 14 August 2021).
- Avid Technology. EVO Axial Flux Electric Motor AF140 Model. Available online: https://avidtp.com/product/evo-motors/ (accessed on 2 May 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Traditional Masses (kg) | Fully Electric Masses (kg) | Hybrid Electric Masses (kg): 20 kg Fuel | Hybrid Electric Masses (kg): 10 kg Fuel |
|---|---|---|---|---|
| Empty Mass | 211.6 | 211.6 | 211.6 | 211.6 |
| Engine/Generator | 75.4 | 75.4 | 75.4 | |
| Fuel | 48.5 | 20 | 10 | |
| Maximum Battery Mass | 150.7 | 84 | 91.4 | |
| Wiring | 37.68 | 29.4 | 32 | |
| Electric Motor | 42.5 | 42.5 | 42.5 | |
| Motor Controller | 7.5 | 7.5 | 7.5 | |
| Crew | 150 | 150 | 150 | 150 |
| Payload | 114.5 | |||
| Total | 600 | |||
| Battery Pack | Type of Powertrain | Cell Configuration | Nominal Voltage |
|---|---|---|---|
| 1 | Fully Electric | 214 S, 1 P | 800 V |
| 2 | Fully Electric | 190 S, 1 P | 700 V |
| 3 | Fully Electric | 163 S, 1 P | 600 V |
| 4 | Hybrid Electric | 130 S, 1 P | 480 V |
| 5 | Hybrid Electric | 119 S, 1 P | 440 V |
| Battery 4, Altitude 1 | Battery 5, Altitude 1 | Battery 4, Altitude 2 | Battery 5, Altitude 2 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| DOH (%) | Range (km) | ΔRange (km) | DOH (%) | Range (km) | ΔRange (km) | DOH (%) | Range (km) | ΔRange (km) | DOH (%) | Range (km) | ΔRange (km) |
| 10 | 378.08 | 5.00 | 10 | 378.07 | 5.52 | 10 | 369.69 | 9.88 | 10 | 369.68 | 10.68 |
| 11 | 382.24 | 9.16 | 11 | 382.23 | 9.68 | 11 | 369.73 | 9.91 | 11 | 369.72 | 10.72 |
| 12 | 385.05 | 11.98 | 12 | 385.05 | 12.49 | 12 | 369.76 | 9.95 | 12 | 369.76 | 10.75 |
| 13 | 385.53 | 12.46 | 13 | 378.53 | 5.97 | 13 | 369.80 | 9.99 | 13 | 354.14 | −4.87 |
| 14 | 383.67 | 10.60 | 14 | 353.59 | −18.97 | 14 | 358.98 | −0.83 | 14 | 330.88 | −28.12 |
| 15 | 360.05 | −13.02 | 15 | 331.97 | −40.58 | 15 | 336.95 | −22.86 | 15 | 310.73 | −48.27 |
| Battery 1, Altitude 1 | Battery 2, Altitude 1 | Battery 1, Altitude 2 | Battery 2, Altitude 2 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| DOH (%) | Range (km) | ΔRange (km) | DOH (%) | Range (km) | ΔRange (km) | DOH (%) | Range (km) | ΔRange (km) | DOH (%) | Range (km) | ΔRange (km) |
| 10 | 378.08 | 1.23 | 10 | 378.07 | 2.08 | 10 | 369.69 | 3.70 | 10 | 369.68 | 5.05 |
| 11 | 382.24 | 5.39 | 11 | 382.23 | 6.24 | 11 | 369.73 | 3.74 | 11 | 369.72 | 5.09 |
| 12 | 385.05 | 8.20 | 12 | 385.05 | 9.05 | 12 | 369.76 | 3.78 | 12 | 369.76 | 5.12 |
| 13 | 385.53 | 8.68 | 13 | 378.53 | 2.54 | 13 | 369.80 | 3.82 | 13 | 354.14 | −10.50 |
| 14 | 383.67 | 6.82 | 14 | 353.59 | −22.41 | 14 | 358.98 | −7.00 | 14 | 330.88 | −33.75 |
| 15 | 360.05 | −16.80 | 15 | 331.97 | −44.02 | 15 | 336.95 | −29.03 | 15 | 310.73 | −53.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
McQueen, M.; Karataş, A.E.; Bramesfeld, G.; Demir, E.; Arenas, O. Feasibility Study of Electrified Light-Sport Aircraft Powertrains. Aerospace 2022, 9, 224. https://doi.org/10.3390/aerospace9040224
McQueen M, Karataş AE, Bramesfeld G, Demir E, Arenas O. Feasibility Study of Electrified Light-Sport Aircraft Powertrains. Aerospace. 2022; 9(4):224. https://doi.org/10.3390/aerospace9040224
Chicago/Turabian StyleMcQueen, Madeline, Ahmet E. Karataş, Götz Bramesfeld, Eda Demir, and Osvaldo Arenas. 2022. "Feasibility Study of Electrified Light-Sport Aircraft Powertrains" Aerospace 9, no. 4: 224. https://doi.org/10.3390/aerospace9040224