
Observability Analysis and Improvement Approach for Cooperative Optical Orbit Determination


Abstract
:1. Introduction
2. Observability Analysis of the Two-Spacecraft OD System
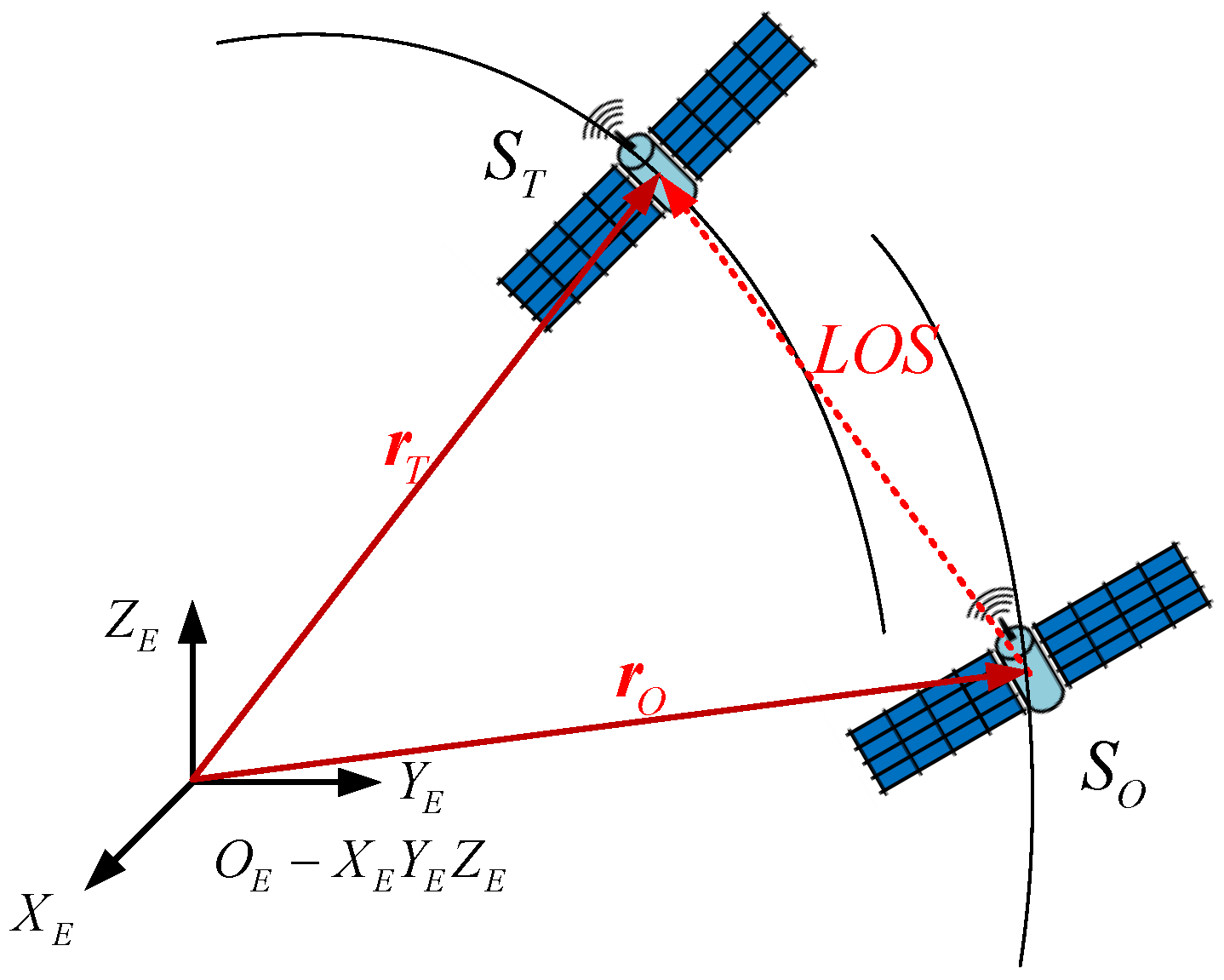
2.1. System Description
2.1.1. State Model
2.1.2. Measurement Model
2.1.3. Observability Matrix
2.2. Observability of the Angle-Only Cooperative OD System
2.2.1. General Case
2.2.2. Symmetric Case
2.2.3. Same Circular Orbit Case
3. Improvement Approach for Cooperative Optical Orbit Determination
3.1. System Description for the Cooperative OD System with an Additional Observer
3.2. Observability Analysis for the Cooperative OD System with an Additional Observer
3.2.1. General Case
3.2.2. Symmetric Case
3.2.3. Same Circular Observer Case
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, X.; Cheng, Y.; Qiao, D. An adaptive surrogate model-based fast planning for swarm safe migration along halo orbit. Acta Astronaut. 2022, 194, 309–322. [Google Scholar] [CrossRef]
- Wu, W.R.; Tang, Y.H.; Zhang, L.H.; Qiao, D. Design of communication relay mission for supporting lunar-farside soft landing. Sci. China Inf. Sci. 2018, 61, 040305. [Google Scholar] [CrossRef]
- Markley, F. Autonomous navigation using landmark and intersatellite data. In Proceedings of the Astrodynamics Conference, Seattle, WA, USA, 20–22 August 1984; pp. 1987–1990. [Google Scholar] [CrossRef]
- Psiaki, M.L. Autonomous orbit determination for two spacecraft from relative position measurements. J. Guid. Control Dyn. 1999, 22, 305–312. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.H.; Wu, W.R.; Qiao, D.; Li, X.Y. Effect of orbital shadow at an Earth--Moon Lagrange point on relay communication mission. Sci. China Inf. Sci. 2017, 60, 112301. [Google Scholar] [CrossRef] [Green Version]
- Li, X.Y.; Qiao, D.; Barucci, M.A. Analysis of equilibria in the doubly synchronous binary asteroid systems concerned with non-spherical shape. Astrodynamics 2018, 2, 133–146. [Google Scholar] [CrossRef]
- Psiaki, M.L. Absolute orbit and gravity determination using relative position measurements between two satellites. J. Guid. Control Dyn. 2011, 34, 1285–1297. [Google Scholar] [CrossRef] [Green Version]
- Li, X.Y.; Qiao, D.; Li, P. Frozen orbit design and maintenance with an application to small body exploration. Aerosp. Sci. Technol. 2019, 92, 170–180. [Google Scholar] [CrossRef]
- Li, X.Y.; Qiao, D.; Li, P. Bounded Trajectory design and self-adaptive maintenance control near non-synchronized binary systems comprised of small irregular bodies. Acta Astronaut. 2018, 152, 768–781. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Z.; Wang, N.; Hoque, M.; Wang, L.; Li, R.; Zhang, Y.; Yuan, H. Real-Time Precise Orbit Determination for LEO between Kinematic and Reduced-Dynamic with Ambiguity Resolution. Aerospace 2022, 9, 25. [Google Scholar] [CrossRef]
- Colagrossi, A.; Lavagna, M. Fault Tolerant Attitude and Orbit Determination System for Small Satellite Platforms. Aerospace 2022, 9, 46. [Google Scholar] [CrossRef]
- Wang, J.; Butcher, E.A.; Lovell, T.A. Ambiguous relative orbits in sequential relative orbit estimation with range-only measurements. Acta Astronaut. 2018, 151, 626–644. [Google Scholar] [CrossRef]
- Christian, J.A. Relative navigation using only intersatellite range measurements. J. Spacecr. Rocket 2016, 54, 13–18. [Google Scholar] [CrossRef]
- Qin, T.; Qiao, D.; Macdonald, M. Relative orbit determination using only intersatellite range measurements. J. Guid. Control Dyn. 2019, 42, 703–710. [Google Scholar] [CrossRef]
- Qin, T.; Qiao, D.; Macdonald, M. Relative orbit determination for unconnected spacecraft within a constellation. J. Guid. Control Dyn. 2021, 44, 614–621. [Google Scholar] [CrossRef]
- Qin, T.; Macdonald, M.; Qiao, D. Fully Decentralized Cooperative Navigation for Spacecraft Constellations. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2383–2394. [Google Scholar] [CrossRef]
- Woffinden, D.C. Angle-only navigation for autonomous orbital rendezvous. J. Guid. Control Dyn. 2007, 30, 1455–1469. [Google Scholar] [CrossRef]
- Kaufman, E.; Lovell, T.A.; Lee, T. Nonlinear observability measure for relative orbit determination with angle-only measurements. J. Astronaut. Sci. 2016, 63, 60–80. [Google Scholar] [CrossRef]
- Ou, Y.; Zhang, H.B.; Li, B. Absolute orbit determination using line-of-sight vector measurements between formation flying spacecraft. Astrophys. Space Sci. 2018, 363, 76. [Google Scholar] [CrossRef]
- Cappuccio, P.; Notaro, V.; Ruscio, A.D. Report on First Inflight Data of BepiColombo’s Mercury Orbiter Radio Science Experiment. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4984–4988. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Y.; Qiao, D. Transfer to near-Earth asteroids from a lunar orbit via Earth flyby and direct escaping trajectories. Acta Astronaut. 2017, 133, 177–184. [Google Scholar] [CrossRef]
- Zhang, L. Development and Prospect of Chinese Lunar Relay Communication Satellite. Space Sci. Technol. 2021, 2021, 3471608. [Google Scholar] [CrossRef]
- Jia, B.; Pham, K.D.; Blasch, E. Cooperative space object tracking using space-based optical sensors via consensus-based filters. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1908–1936. [Google Scholar] [CrossRef]
- Li, X.Y.; Warier, R.R.; Sanyal, A.K.; Qiao, D. Trajectory Tracking Near Small Bodies Using Only Attitude Control. J. Guid. Control Dyn. 2019, 42, 109–122. [Google Scholar] [CrossRef]
- Huang, J.; Lei, X.; Zhao, G.; Liu, L.; Li, Z.; Luo, H.; Sang, J. Short-Arc Association and Orbit Determination for New GEO Objects with Space-Based Optical Surveillance. Aerospace 2021, 8, 298. [Google Scholar] [CrossRef]
- Stokes, G.; Vo, C.; Sridharan, R. The space-based visible program. In Proceedings of the Space 2000 Conference and Exposition, Long Beach, CA, USA, 19–21 September 2000. [Google Scholar]
- Dong, L.; Yi, D. Initial Orbit Determination of Space Object Using Space-Based Optical Observations. In Proceedings of the 2012 International Conference on Computer Science and Electronics Engineering, Hangzhou, China, 23–25 March 2012. [Google Scholar] [CrossRef]
- Hermann, R.; Krener, A. Nonlinear controllability and observability. IEEE Trans. Autom. Control 1977, 22, 728–740. [Google Scholar] [CrossRef] [Green Version]
- Ham, F.M.; Brown, R.G. Observability, eigenvalues, and Kalman filtering. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 269–273. [Google Scholar] [CrossRef]
- Wang, Y.; Qiao, D.; Cui, P.Y. Design of optimal impulse transfers from the Sun–Earth libration point to asteroid. Adv. Space Res. 2015, 56, 176–186. [Google Scholar] [CrossRef]
- Molli, S.; Durante, D.; Gascioli, G.; Proietti, S. Performance analysis of a Martian polar navigation system. In Proceedings of the 72nd International Astronautical Congress, Dubai, United Arab Emirates, 25–29 October 2021. [Google Scholar]
- Woffinden, D.C.; Geller, D.K. Observability criteria for angle-only navigation. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1194–1208. [Google Scholar] [CrossRef]
- Yim, J.; Crassidis, J.; Junkins, J. Autonomous orbit navigation of two spacecraft system using relative line of sight vector measurements. Adv. Astronaut. Sci. 2005, 1, 257. [Google Scholar]
- Hu, Y.; Sharf, I.; Chen, L. Three-spacecraft autonomous orbit determination and observability analysis with inertial angle-only measurements. Acta Astronaut. 2020, 170, 106–121. [Google Scholar] [CrossRef]
- Hu, Y.; Sharf, I.; Chen, L. Distributed orbit determination and observability analysis for satellite constellations with angle-only measurements. Automatica 2021, 129, 109626. [Google Scholar] [CrossRef]
- Stefano, I.D.; Cappuccio, P.; Iess, L. The BepiColombo solar conjunction experiments revisited. Class. Quantum Gravity 2022, 38, 0550002. [Google Scholar] [CrossRef]
- Cui, P.Y.; Qiao, D.; Cui, H.T. Target selection and transfer trajectories design for exploring asteroid mission. Sci. China Technol. Sci. 2010, 53, 1150–1158. [Google Scholar] [CrossRef]
- Li, X.Y.; Sanyal, A.K.; Warier, R.R.; Qiao, D. Landing of Hopping Rovers on Irregularly-shaped Small Bodies Using Attitude Control. Adv. Space Res. 2020, 65, 2674–2691. [Google Scholar] [CrossRef]
- Howard, D.C. Orbital Mechanics for Engineering Students, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2021; pp. 59–61. [Google Scholar]
- Maskell, C.P. Sapphire: Canada’s Answer to Space-Based Surveillance of Orbital Objects. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Wailea Beach, Maui, HI, USA, 16–19 September 2008. [Google Scholar]
- Li, X.Y.; Qiao, D.; Jia, F.D. Investigation of Stable Regions of Spacecraft Motion in Binary Asteroid Systems by Terminal Condition Maps. J. Astronaut. Sci. 2021, 68, 891–915. [Google Scholar] [CrossRef]
- Merel, M.H.; Mullin, F.J. Analytic Monte Carlo error analysis. J. Spacecr. Rocket. 1968, 5, 1304–1308. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
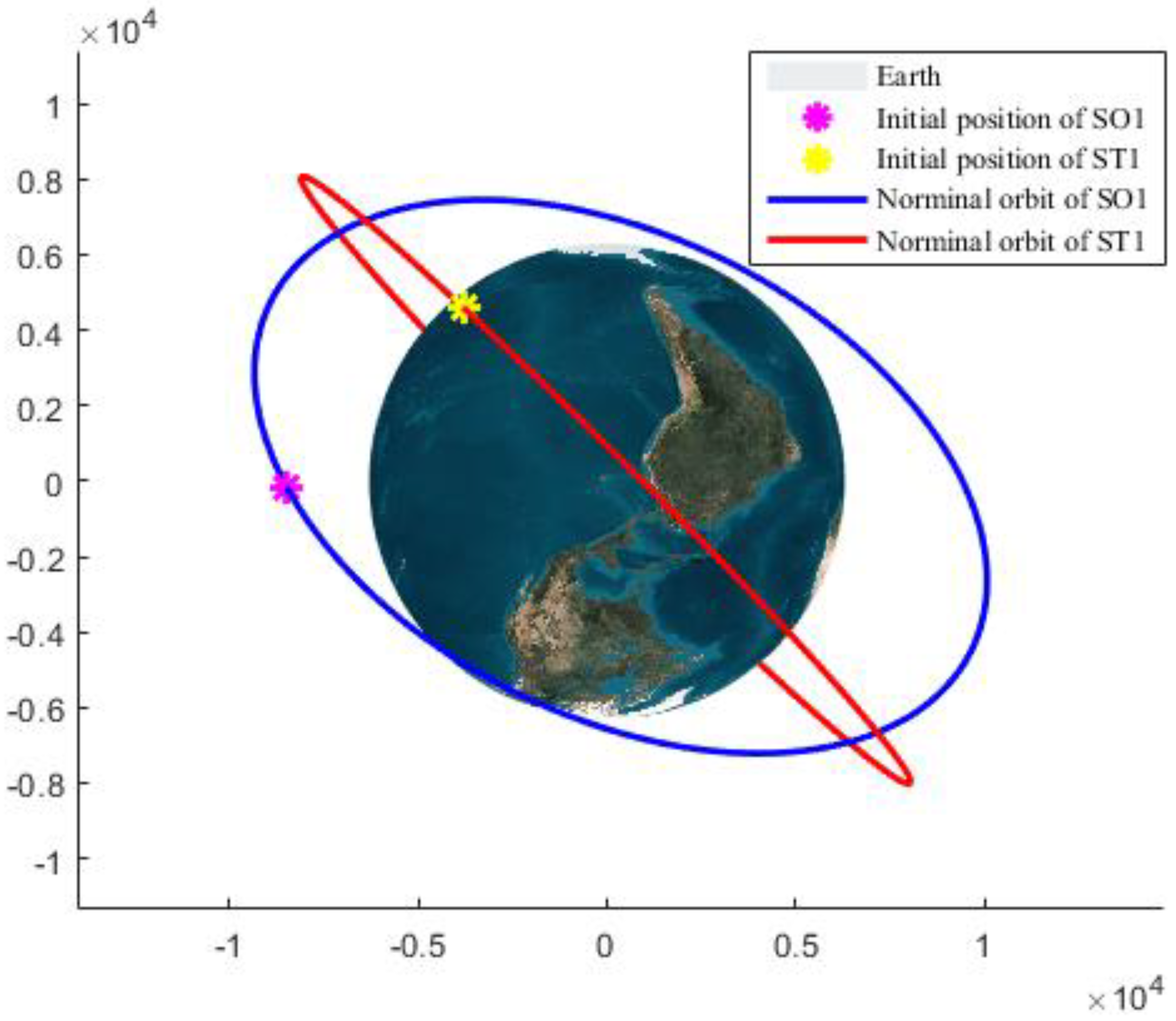
| Spacecraft | a/km | e | i/deg | Ω/deg | ω/deg | n/deg | Annotation |
|---|---|---|---|---|---|---|---|
| ST1 | 11,378.137 | 0.01 | 45 | 94.8 | 199.0 | −54.13 | Elliptical orbit |
| ST2 | 0 | Circular orbit | |||||
| SO1 | 10,378.137 | 0.05 | 45.05 | 29.93 | 132.9 | −17.74 | General case |
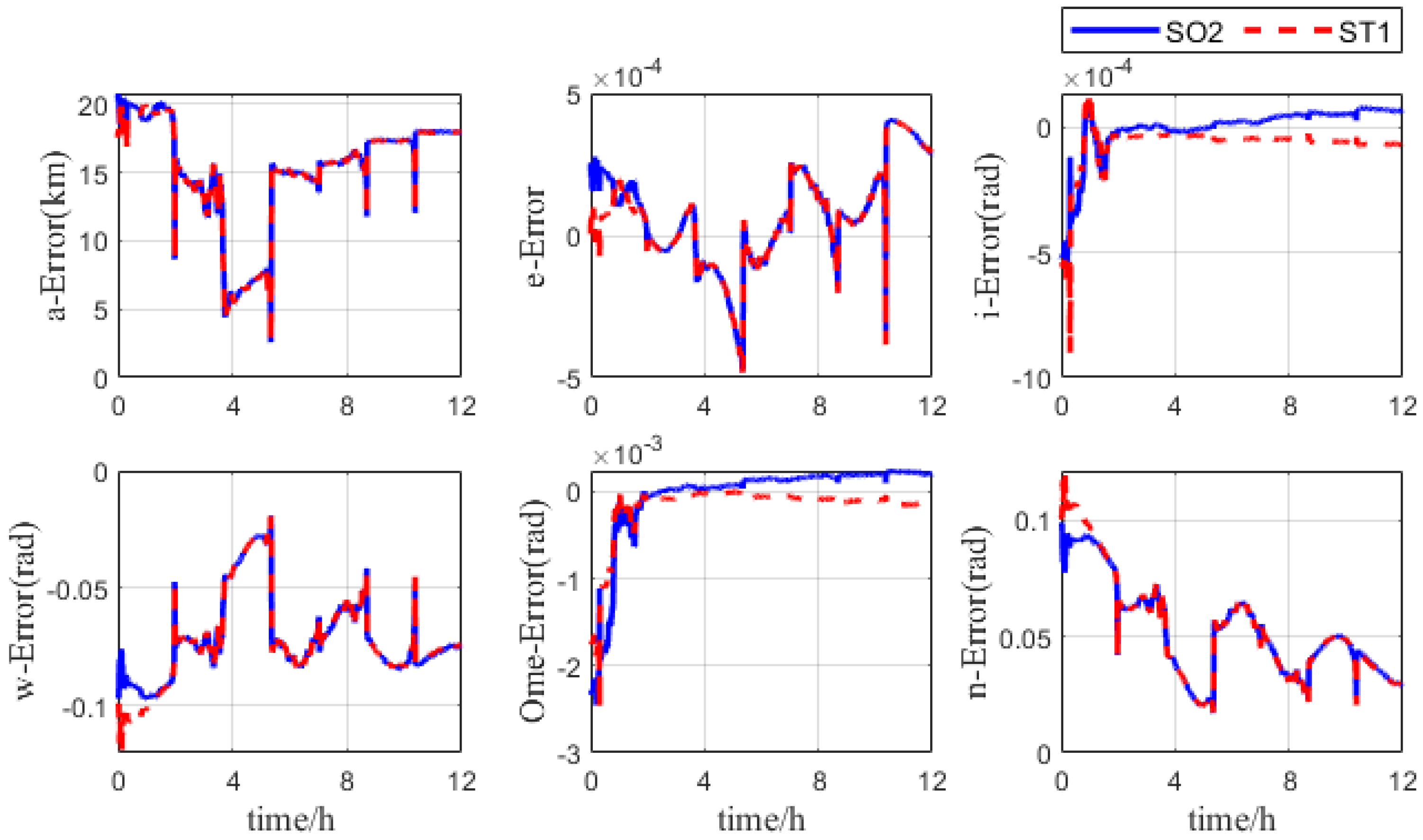
| SO2 | 11,378.137 | 0.01 | 30 | 94.8 | 199.0 | −54.13 | Symmetric case |
| SO3 | 11,378.137 | 0 | 45 | 94.8 | 199.0 | −24.13 | Same circular case |
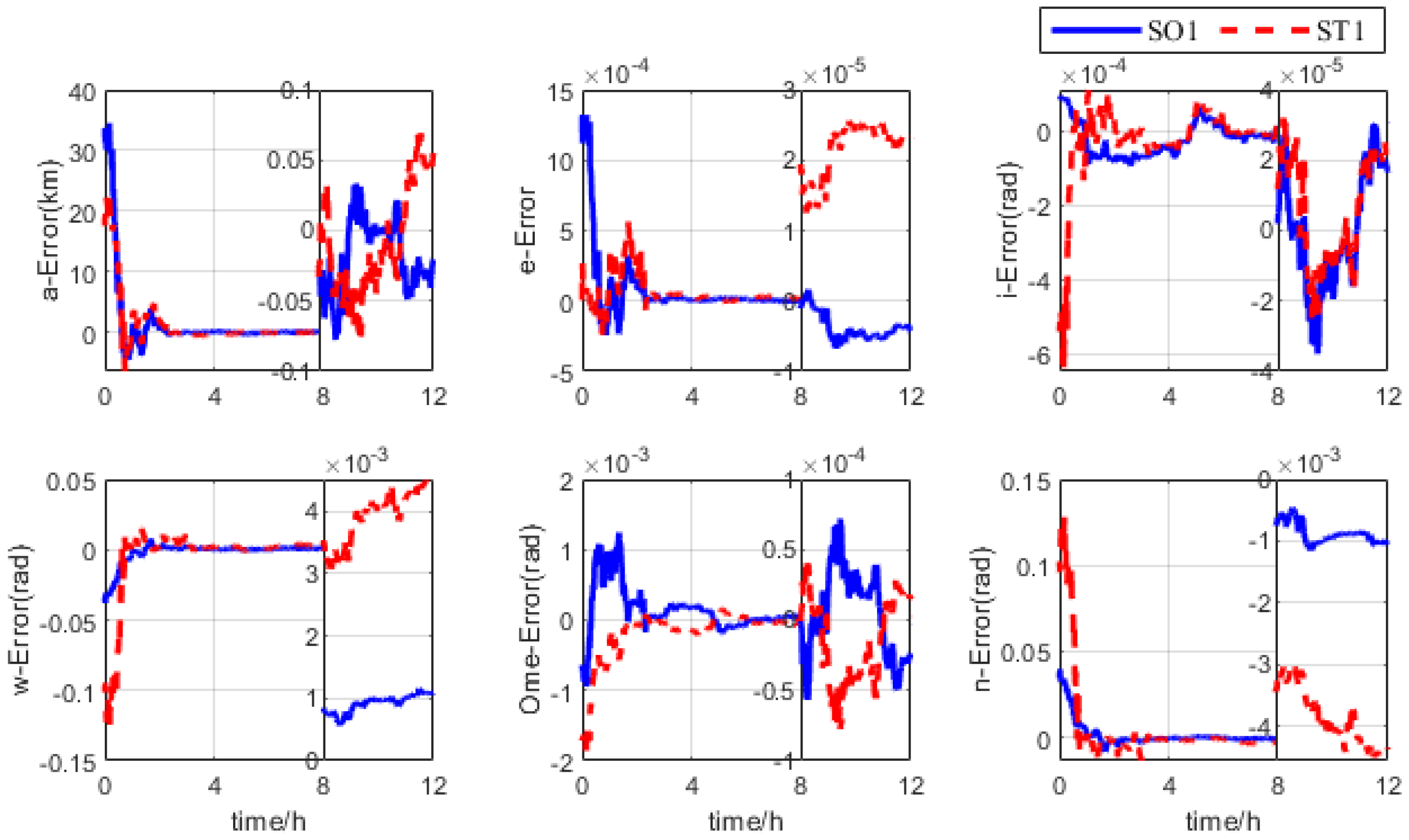
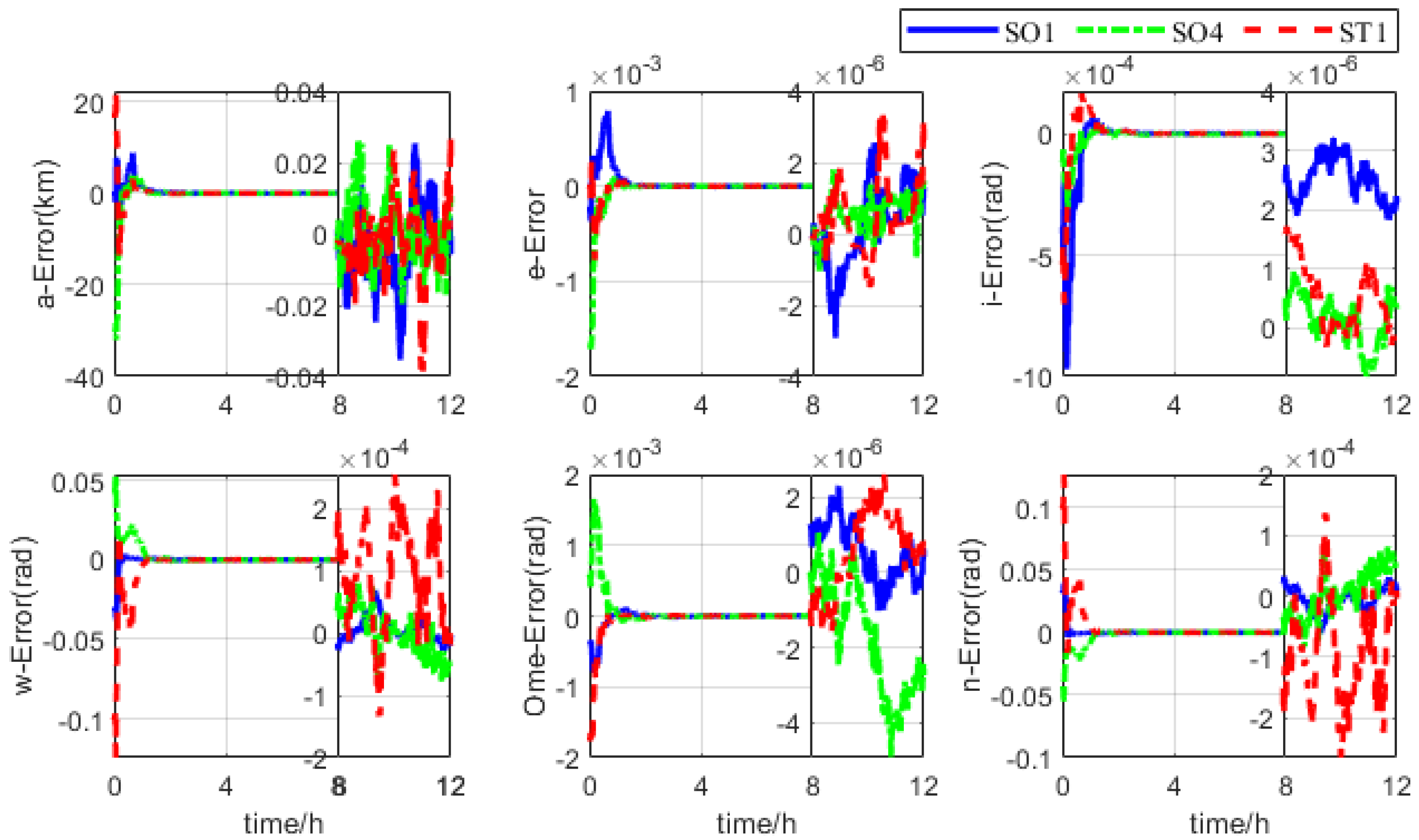
| Spacecraft | a/km | e | i/deg | Ω/deg | ω/deg | n/deg |
|---|---|---|---|---|---|---|
| SO1 | 33.3 | 1.3 × 10−3 | 8.5 × 10−5 | 1.2 × 10−3 | 7.7 × 10−3 | 0.039 |
| ST1 | 18.6 | 2.7 × 10−4 | 1.1 × 10−4 | 1.6 × 10−4 | 0.015 | 0.129 |
| Name | Value |
|---|---|
| Initial state deviation of each spacecraft (km, km/s) | [10, 10, 10, 1 × 10−3, 1 × 10−3, 1 × 10−3]T |
| Initial covariance of each spacecraft (km2, km2/s2) | diag ([100, 100, 100, 1 × 10−6, 1 × 10−6, 1 × 10−6]) |
| Standard deviation of measurement noise | 0.01 deg (approximately 40 arcsec) |
| Process noise | diag (10−12) |
| Simulation step | 60 s |
| Index | x/km | y/km | z/km | vx/(km/s) | vy/(km/s) | vz/(km/s) |
|---|---|---|---|---|---|---|
| STD | 0.0306 | 0.0200 | 0.0993 | 3.074 × 10−5 | 2.9191 × 10−5 | 2.4185 × 10−5 |
| CR | 99.69% | 99.80% | 99.01% | 96.93% | 97.08% | 97.85% |
| Row | aO | eO | iO | ωO | ΩO | nO | aT | eT | iT | ωT | ΩT | nT |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | −1 | ||||||||||
| 2 | 1 | −1 | ||||||||||
| 3 | 1 | 1 | ||||||||||
| 4 | 1 | −1 | −1.3 | |||||||||
| 5 | 1 | 0.92 | ||||||||||
| 6 | 1 | −1 |
| Row | aO | eO | iO | ωO | ΩO | nO | aT | eT | iT | ωT | ΩT | nT |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 1 | ||||||||||
| 2 | 1 | |||||||||||
| 3 | 1 | −0.866 | −0.354 | |||||||||
| 4 | 1 | −1 | −6.5 × 10−4 | −0.5 | 1 | 1.319 | −1 | |||||
| 5 | 1 | 0.7071 | −0.866 | |||||||||
| 6 | 1 |
| Spacecraft | a/km | e | i/deg | Ω/deg | ω/deg | n/deg |
|---|---|---|---|---|---|---|
| SO4 | 11,878.137 | 0.02 | 30 | 0 | 0 | 10 |
| Configuration | Index | x/km | y/km | z/km | vx/(km/s) | vy/(km/s) | vz/(km/s) |
|---|---|---|---|---|---|---|---|
| General orbit | STD | 0.0091 | 0.0010 | 0.0117 | 1.1744 × 10−6 | 6.0360 × 10−6 | 9.2720 × 10−7 |
| CR | 99.99% | 99.99% | 99.99% | 99.88% | 99.40% | 99.99% | |
| Symmetric orbit | STD | 0.0018 | 0.0076 | 0.113 | 5.2919 × 10−6 | 5.0495 × 10−6 | 7.3012 × 10−6 |
| CR | 99.99% | 99.99% | 99.99% | 99.47% | 99.50% | 99.27% | |
| Same circular orbit | STD | 0.0036 | 0.0060 | 0.0105 | 5.4042 × 10−6 | 1.3093 × 10−6 | 4.3750 × 10−6 |
| CR | 99.99% | 99.99% | 99.89% | 99.46% | 99.87% | 99.56% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Y.; Qin, T.; Zhou, X. Observability Analysis and Improvement Approach for Cooperative Optical Orbit Determination. Aerospace 2022, 9, 166. https://doi.org/10.3390/aerospace9030166
Luo Y, Qin T, Zhou X. Observability Analysis and Improvement Approach for Cooperative Optical Orbit Determination. Aerospace. 2022; 9(3):166. https://doi.org/10.3390/aerospace9030166
Chicago/Turabian StyleLuo, Yan, Tong Qin, and Xingyu Zhou. 2022. "Observability Analysis and Improvement Approach for Cooperative Optical Orbit Determination" Aerospace 9, no. 3: 166. https://doi.org/10.3390/aerospace9030166