
Fundamental Framework to Plan 4D Robust Descent Trajectories for Uncertainties in Weather Prediction




Abstract
:1. Introduction
2. Models for Robust Trajectory Planning
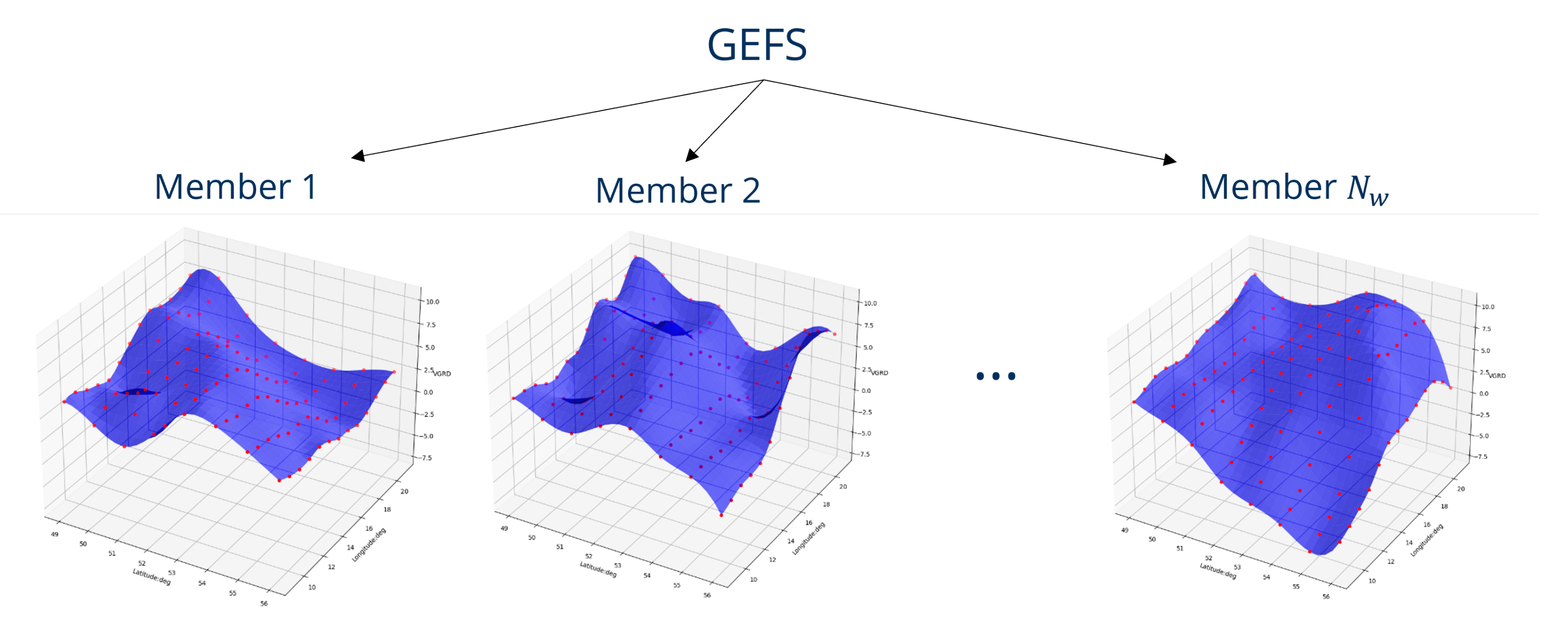
2.1. Uncertainty Models of Weather Prediction
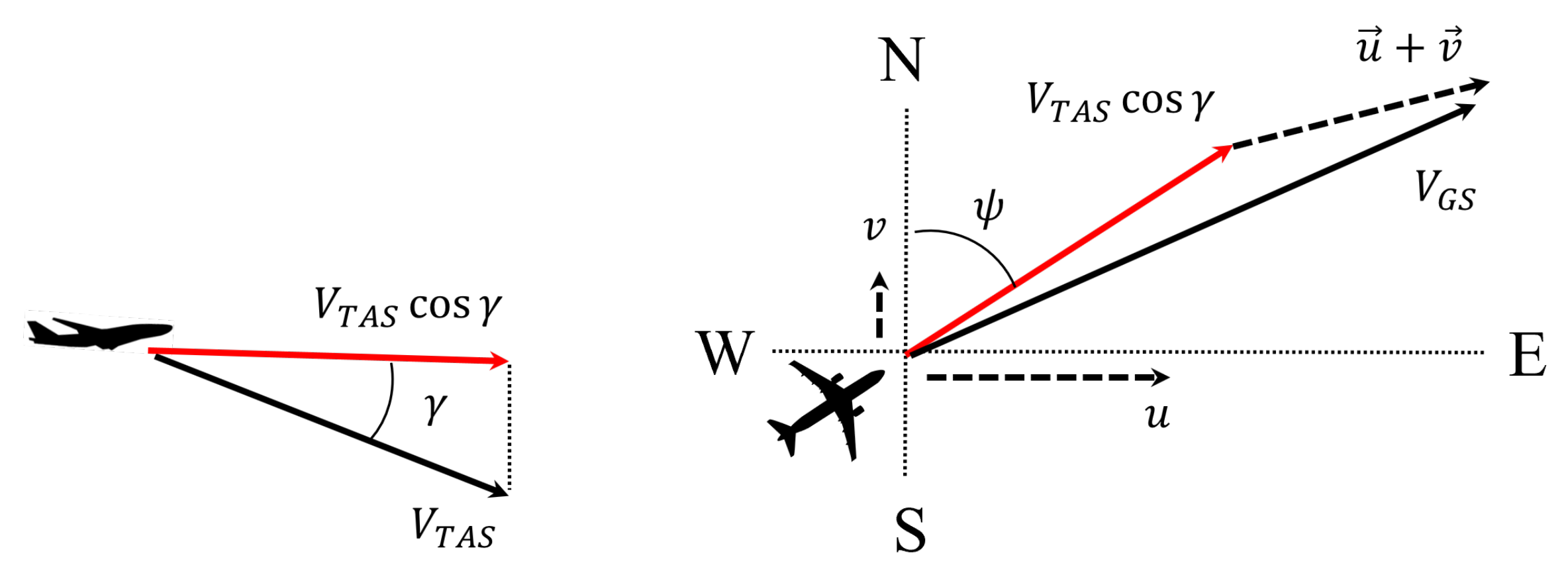
2.2. Flight Performance Models
3. Robust Descent Trajectory Planning
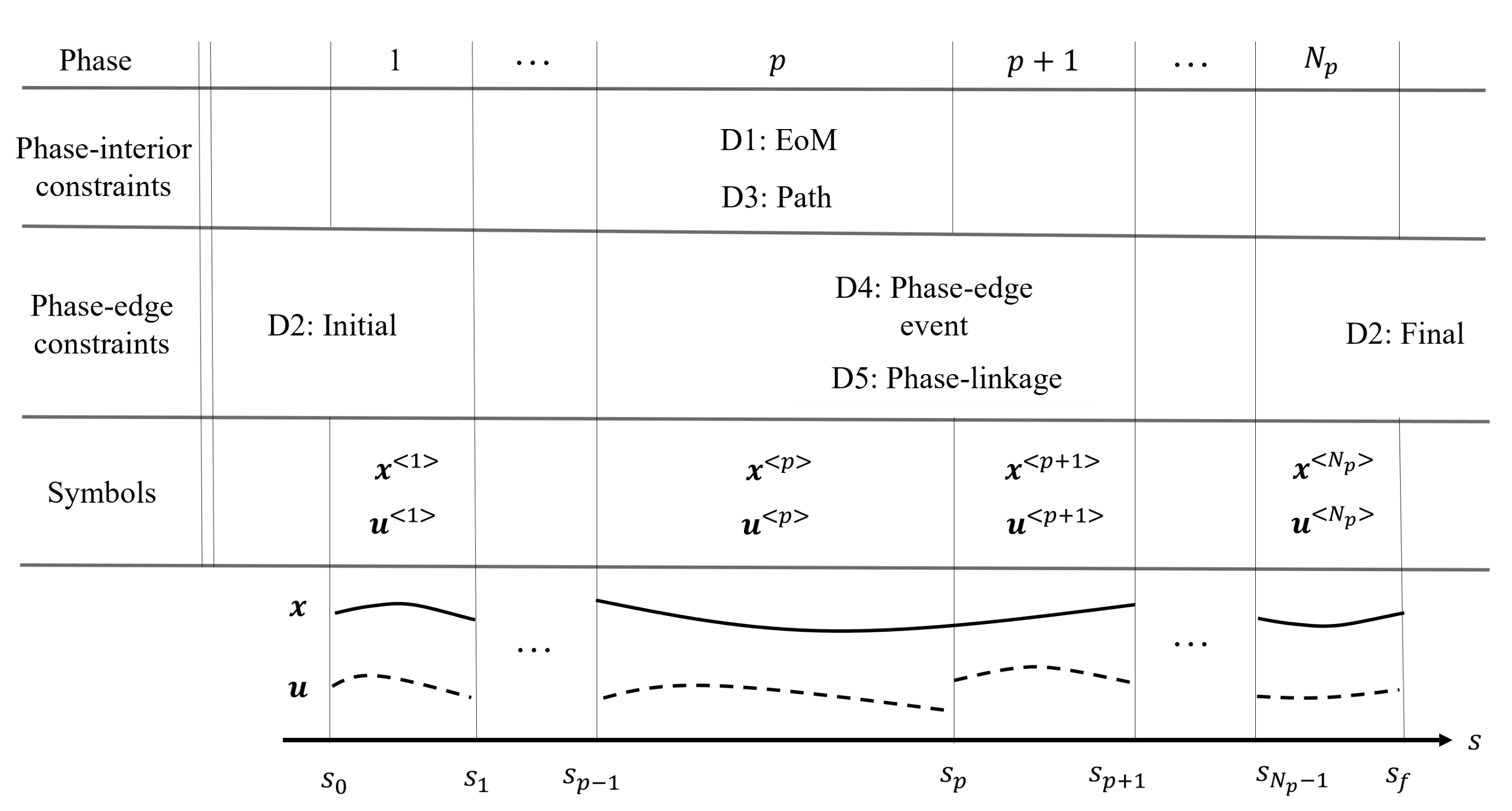
3.1. Deterministic Formalization as a Basis
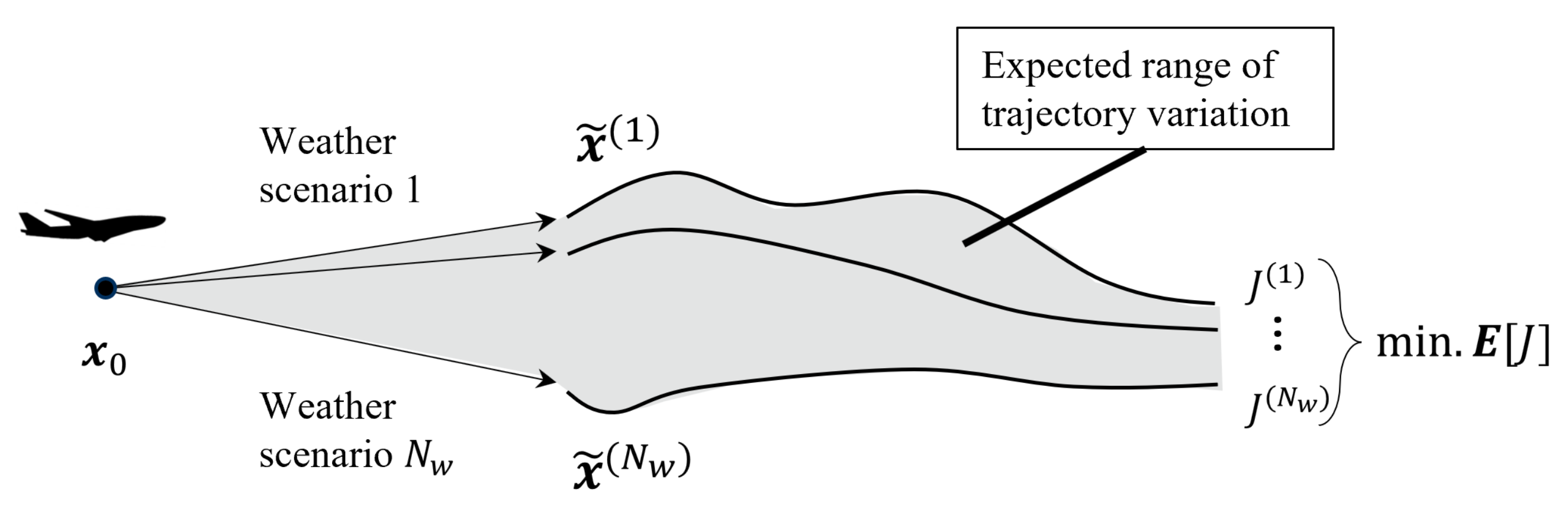
3.2. Robust Trajectory Planning
4. Case Studies
4.1. Scenario Settings
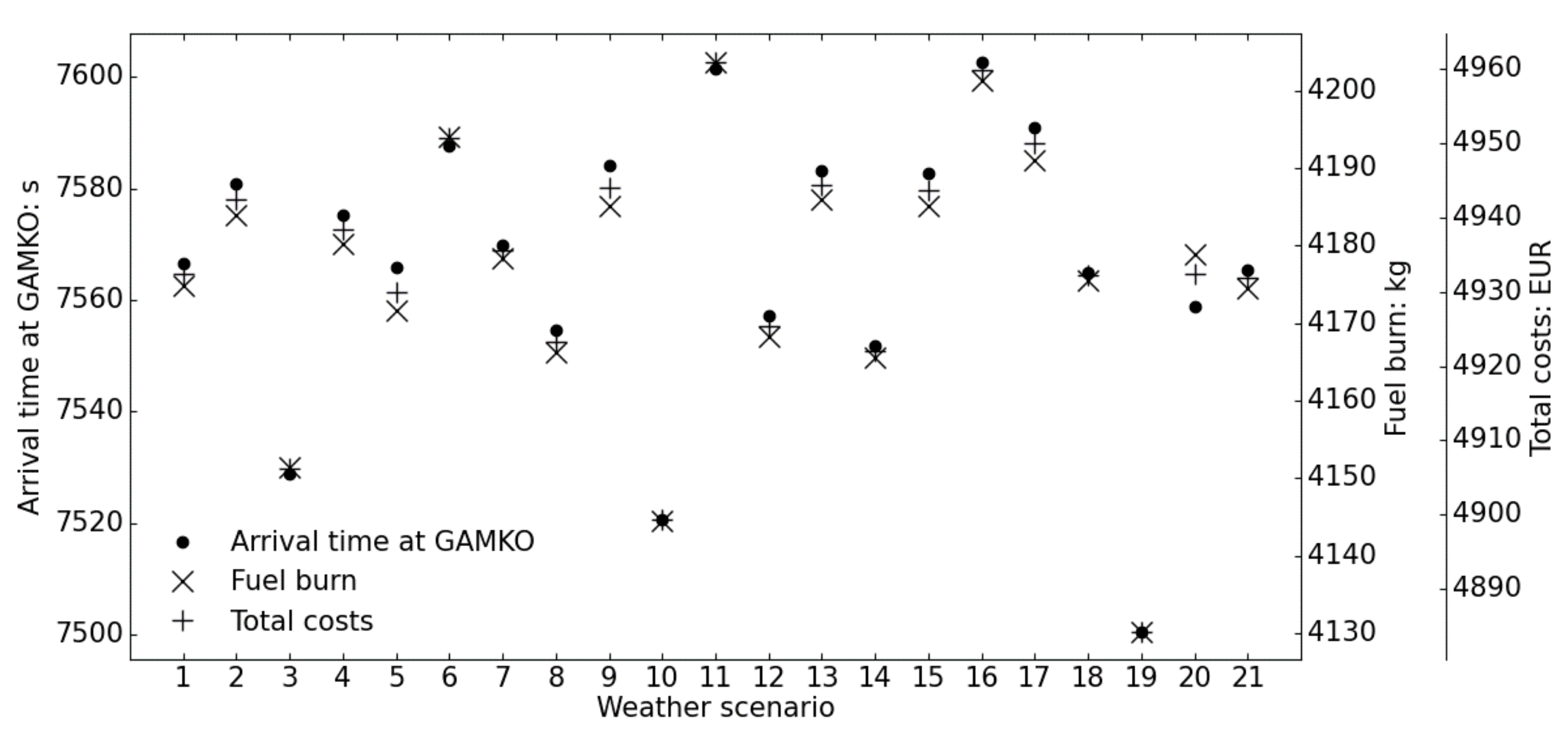
4.2. Robust vs. Scenario-Optimal Trajectories
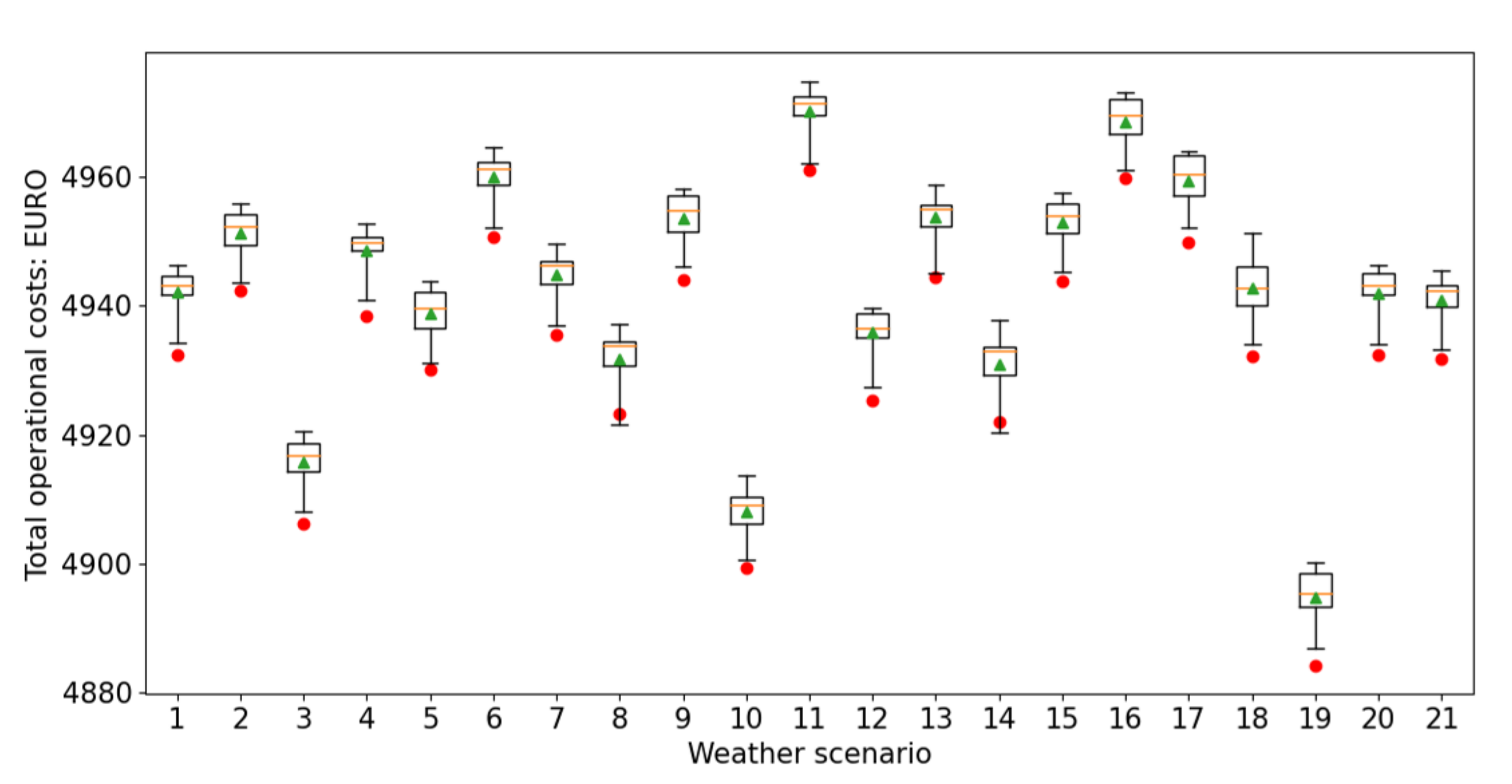
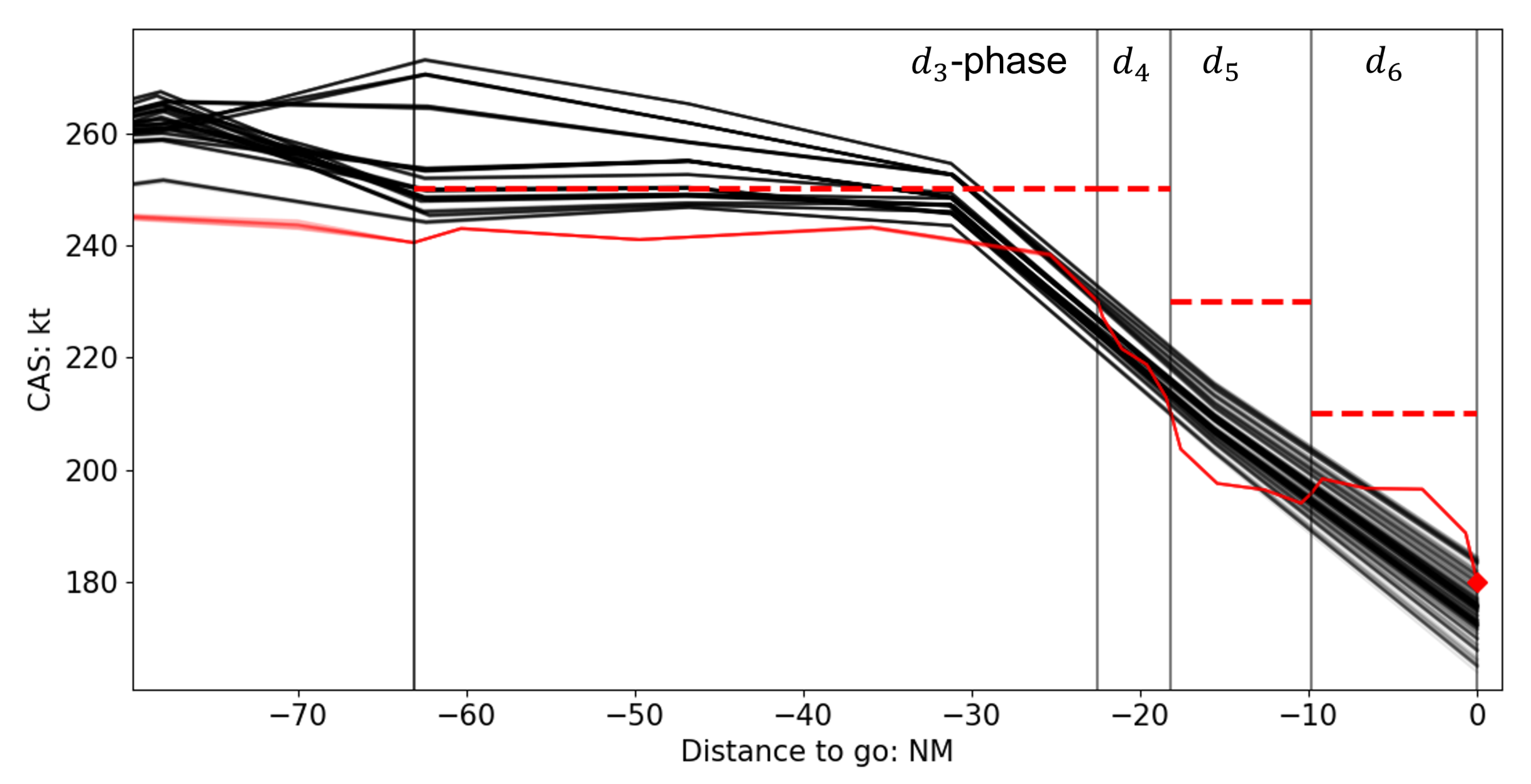
4.3. Robust vs. Inappropriately-Controlled Trajectories
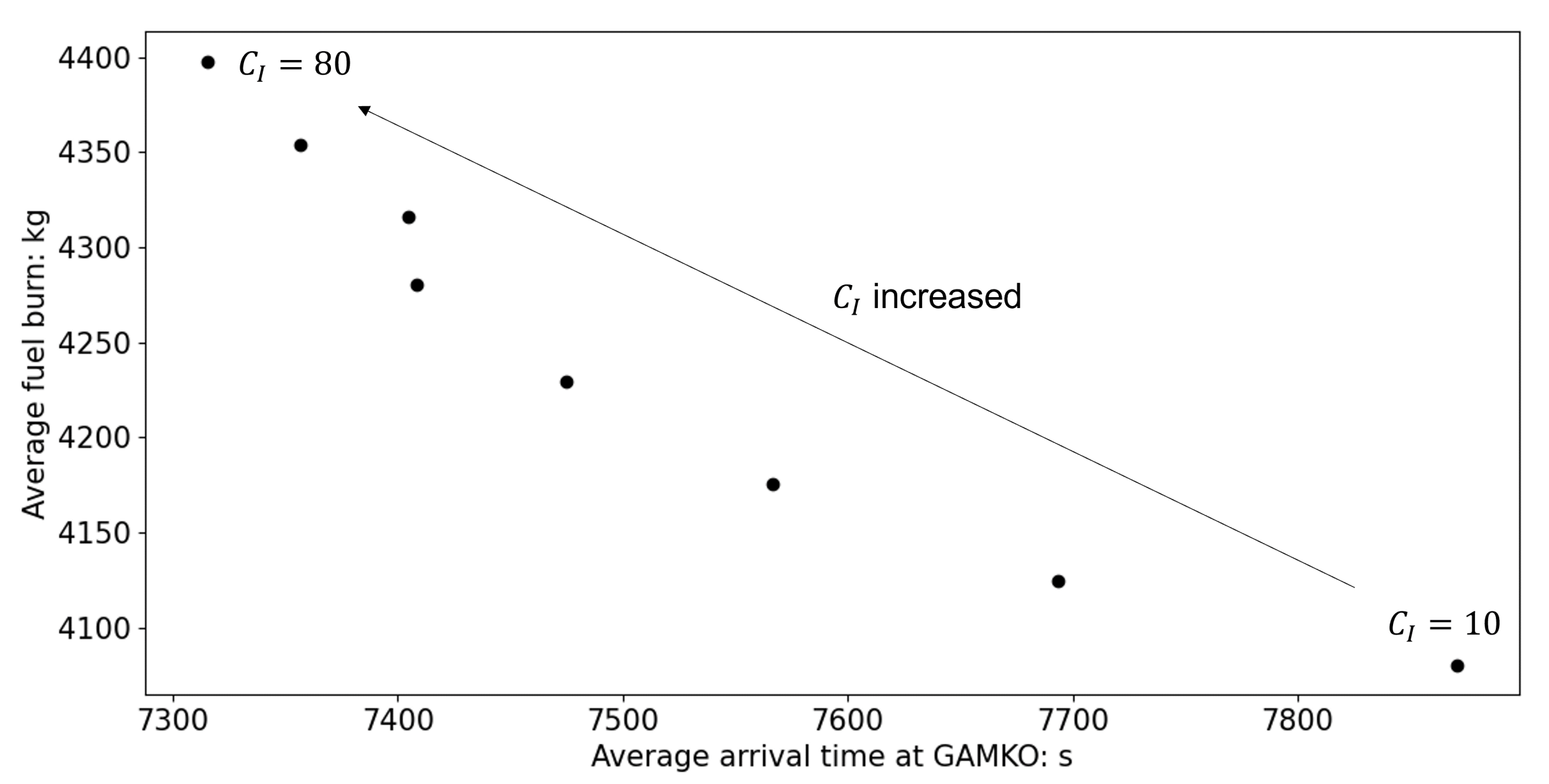
4.4. Effects of Cost-Index and RTA Variations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Three Dimensional B-Spline Function
Appendix B. Derivation of Fuel Burn
References
- Fricke, H.; Seiß, C.; Herrmann, R. Fuel and energy benchmark analysis of continuous descent operations. In Proceedings of the 11th USA/Europe Air Traffic Management Research and Development Seminar (ATM Seminar), Lisbon, Portugal, 23–26 June 2015. [Google Scholar]
- European Commission. Flightpath 2050: Europe’s Vision for Aviation: Maintaining Global Leadership and Serving Society’s Needs; Publications Office: Brussels, Belgium, 2011. [Google Scholar] [CrossRef]
- SESAR Joint Undertaking. European ATM Master Plan: Digitalising Europe’s Aviation Infrastructure: Executive View: 2020 Edition; Publications Office: Brussels, Belgium, 2020. [Google Scholar] [CrossRef]
- Study Group for the Future Air Traffic Systems. Long-Term Vision for the Future Air Traffic Systems—Changes to Intelligent Air Traffic Systems; The Ministry of Land, Infrastructure, Transport and Tourism (MLIT): Tokyo, Japan, 2010. [Google Scholar]
- Federal Aviation Administration (FAA). NextGen Implementation Plan 2018–2019; Office of NextGen: Washington, DC, USA, 2018. [Google Scholar]
- European Union (EU). Single European Sky Performance Scheme; EU regulation No. 290/2013; European Union: Brussels, Belgium, 2013. [Google Scholar]
- International Civil Aviation Organization (ICAO). Continuous Descent Operations (CDO) Manual; Doc. 9931; International Civil Aviation Organization: Montreal, QC, Canada, 2010. [Google Scholar]
- Continuous Climb and Descent Operations. European Organisation for the Safety of Air Navigation (Eurocontrol). Available online: https://www.eurocontrol.int/concept/continuous-climb-and-descent-operations (accessed on 25 November 2021).
- European Organisation for the Safety of Air Navigation (Eurocontrol). European CCO/CDO Action Plan; Publications Office: Brussels, Belgium, 2020. [Google Scholar]
- Vertical Flight Efficiency at Airports. European Organisation for the Safety of Air Navigation (Eurocontrol). Available online: https://ansperformance.eu/efficiency/vfe/ (accessed on 25 November 2021).
- Toratani, D.; Wickramasinghe, N.K.; Hirabayashi, H. Simulation techniques for arrival procedure design in continuous descent operation. In Proceedings of the 2018 Winter Simulation Conference, Gothenburg, Sweden, 9–12 December 2018. [Google Scholar] [CrossRef]
- Clarke, J.P.; Brooks, J.; Nagle, G.; Scacchioli, A.; White, W.; Liu, S.R. Optimized profile descent arrivals at Los Angeles international airport. J. Aircr. 2013, 50, 360–369. [Google Scholar] [CrossRef]
- Park, S.G.; Clarke, J.P. Vertical trajectory optimization for continuous descent arrival procedure. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Minneapolis, Minnesota, 13–16 August 2012. [Google Scholar] [CrossRef]
- Dalmau, R.; Prats, X. Fuel and time savings by flying continuous cruise climbs estimating the benefit pools for maximum range operations. Transp. Res. Part D Transp. Environ. 2015, 35, 62–71. [Google Scholar] [CrossRef]
- De Jong, P.M.A. Continuous Descent Operations Using Energy Principles. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2014. [Google Scholar] [CrossRef]
- Dalmau, R.; Prats, X. Controlled time of arrival windows for already initiated energy-neutral continuous descent operations. Transp. Res. Part C Emerg. Technol. 2017, 85, 334–347. [Google Scholar] [CrossRef] [Green Version]
- Lindner, M.; Rosenow, J.; Zeh, T.; Fricke, H. In-flight aircraft trajectory optimization within corridors defined by ensemble weather forecasts. Aerospace 2020, 7, 144. [Google Scholar] [CrossRef]
- Lindner, M.; Rosenow, J.; Fricke, H. Aircraft trajectory optimization with dynamic input variables. CEAS Aeronaut. J. 2020, 11, 321–331. [Google Scholar] [CrossRef]
- Rosenow, J.; Lindner, M.; Scheiderer, J. Advanced flight planning and the benefit of in-flight aircraft trajectory optimization. Sustainability 2021, 13, 1383. [Google Scholar] [CrossRef]
- Franco, A.; Rivas, D.; Valenzuela, A. Probabilistic aircraft trajectory prediction in cruise flight considering ensemble wind forecasts. Aerosp. Sci. Technol. 2018, 82–83, 350–362. [Google Scholar] [CrossRef]
- Hernàndez-Romero, E. Probabilistic Aircraft Conflict Detection and Resolution under the Effects of Weather Uncertainty. Ph.D. Thesis, Universidad de Sevilla, Sevilla, Spain, 2020. [Google Scholar]
- Franco, A.; Rivas, D.; Valenzuela, A. Optimal aircraft path planning in a structured airspace using ensemble weather forecast. In Proceedings of the 8th SESAR Innovation Days, Salzburg, Austria, 3–7 December 2018. [Google Scholar]
- Legrand, K.; Puechmorel, S.; Delahaye, D.; Zhu, Y. Robust aircraft optimal trajectory in the presence of wind. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 30–38. [Google Scholar] [CrossRef]
- Fisher, J.; Bhattacharya, R. Optimal trajectory generation with probabilistic system uncertainty using polynomial chaos. J. Dyn. Syst. Meas. Control 2011, 133, 014501. [Google Scholar] [CrossRef]
- Cottrill, G.C. Hybrid Solution of Stochastic Optimal Control Problems Using Gauss Pseudospectral Method and Generalized Polynomial Chaos Algorithms. Ph.D. Thesis, Air Force Institute of Technology, Kaduna, Nigeria, 2012. [Google Scholar]
- Li, X.; Nair, P.B.; Zhang, Z.; Gao, L.; Gao, C. Aircraft robust trajectory optimization using nonintrusive polynomial chaos. J. Aircr. 2014, 51, 1592–1603. [Google Scholar] [CrossRef]
- Piprek, P. Robust Trajectory Optimization Applying Chance Constraints and Generalized Polynomial Chaos. Ph.D. Thesis, Technische Universität München, München, Germany, 2020. [Google Scholar]
- González-Arribas, D.; Soler, M.; Sanjurjo-Rivo, M. Robust aircraft trajectory planning under wind uncertainty using optimal control. J. Guid. Control. Dyn. 2018, 41, 673–688. [Google Scholar] [CrossRef] [Green Version]
- García-Heras, J.; Soler, M.; González-Arribas, D. Characterization and enhancement of flight planning predictability under wind uncertainty. Int. J. Aerosp. Eng. 2019, 2019, 6141452. [Google Scholar] [CrossRef]
- Soler, M.; González-Arribas, D.; Sanjurjo-Rivo, M.; García-Heras, J.; Sacher, D.; Gelhardt, U.; Lang, J.; Hauf, T.; Simarro, J. Influence of atmospheric uncertainty, convective indicators, and cost-index on the leveled aircraft trajectory optimization problem. Transp. Res. Part C Emerg. Technol. 2020, 120, 102784. [Google Scholar] [CrossRef]
- González-Arribas, D.; Andrés-Enderiz, E.; Soler, M.; Jardines, A.; Garcıa-Heras, J. Probabilistic 4D flight planning in structured airspaces through parallelized simulation on GPUs. In Proceedings of the 9th International Conference for Research in Air Transportation (ICRAT 2020), Tampa, FL, USA, 23–26 June 2020. [Google Scholar]
- Matsuno, Y.; Tsuchiya, T.; Wei, J.; Hwang, I.; Matayoshi, N. Stochastic optimal control for aircraft conflict resolution under wind uncertainty. Aerosp. Sci. Technol. 2015, 43, 77–88. [Google Scholar] [CrossRef]
- Kamo, S.; Rosenow, J.; Fricke, H.; Soler, M. Robust CDO trajectory planning under uncertainties in weather prediction. In Proceedings of the 14th USA/Europe Air Traffic Management Research and Development Seminar (ATM Seminar), Virtual Event, 20–23 September 2021. [Google Scholar]
- Global Ensemble Forecast System (GEFS). National Oceanic and Atmospheric Administration (NOAA). Available online: https://www.ncei.noaa.gov/products/weather-climate-models/global-ensemble-forecast (accessed on 25 November 2021).
- Zhou, X.; Zhu, Y.; Hou, D.; Kleist, D. A comparison of perturbations from an ensemble transform and an ensemble kalman filter for the NCEP Global Ensemble Forecast System. Weather. Forecast. 2016, 31, 2057–2074. [Google Scholar] [CrossRef]
- Rödel, W. Physik unserer Umwelt, die Atmosphäre, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- International Civil Aviation Organization (ICAO). Manual of the ICAO Standard Atmosphere—Extended to 80 kilometres/262,500 feet; Doc. 7488; International Civil Aviation Organization: Montreal, QC, Canada, 1993. [Google Scholar]
- Peters, M.; Konyak, M. The Engineering Analysis and Design of the Aircraft Dynamics Model for the FAA Target Generation Facility; Technical Report; Air Traffic Engineering Co., LLC: Lakewood, NJ, USA, 2012. [Google Scholar]
- National Imagery and Mapping Agency (NIMA). Department of Defense World Geodetic System 1984, Its Definition and Relationships With Local Geodetic Systems; National Imagery and Mapping Agency: Bethesda, MD, USA, 1997. [Google Scholar]
- Walter, R. Flight management systems. In The Avionics Handbook; CRC Press LLC: Boca Raton, FL, USA, 2001; Chapter 15. [Google Scholar]
- Nuic, A.; Mouillet, V. User Manual for the Base of Aircraft Data (BADA) Family 4; 12/11/22-58, Version 1.3; European Organisation for the Safety of Air Navigation (Eurocontrol): Brussels, Belgium, 2016. [Google Scholar]
- Bronsvoort, J. Contributions to Trajectory Prediction Theory and its Application to Arrival Management for Air Traffic Control. Ph.D. Thesis, Universidad Politècnica de Madrid, Madrid, Spain, 2014. [Google Scholar]
- Dalmau, R.; Prats, X.; Baxley, B. Using wind observations from nearby aircraft to update the optimal descent trajectory in real-time. In Proceedings of the 13th USA/Europe Air Traffic Management Research and Development Seminar (ATM Seminar), Vienna, Austria, 17–21 June 2019. [Google Scholar]
- Sáez, R. Traffic Synchronization with Controlled Time of Arrival for Cost-Efficient Trajectories in High-Density Terminal Airspace. Ph.D. Thesis, Universitat Politécnica de Catalunya, Barcelona, Spain, 2021. [Google Scholar] [CrossRef]
- Kamo, S.; Rosenow, J.; Fricke, H. CDO sensitivity analysis for robust trajectory planning under uncertain weather prediction. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020. [Google Scholar] [CrossRef]
- Airbus. Getting to Grips with the Cost Index; Flight Operations Support and Line Assistance, Issue II, STL 945.2369/98; Airbus Customer Services: Blagnac, France, 1998. [Google Scholar]
- Beyer, H.G.; Sendhoff, B. Robust optimization—A comprehensive survey. Comput. Methods Appl. Mech. Eng. 2007, 196, 3190–3218. [Google Scholar] [CrossRef]
- Todorov, E. Optimal Control Theory. In Bayesian Brain: Probabilistic Approaches to Neural Coding; The MIT Press: Cambridge, MA, USA, 2006. [Google Scholar] [CrossRef] [Green Version]
- Wächter, A.; Biegler, L.T. On the implementation of a primal-dual interior point filter line search algorithm for large-scale nonlinear programming. Math. Program. 2006, 106, 25–27. [Google Scholar] [CrossRef]
- Andersson, J.A.E.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi—A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- AIP Germany. Available online: https://www.eisenschmidt.aero/ (accessed on 1 December 2020).
- Jet Fuel Price Monitor. International Air Transport Association (IATA). Available online: https://www.iata.org/en/publications/economics/fuel-monitor/ (accessed on 25 November 2021).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
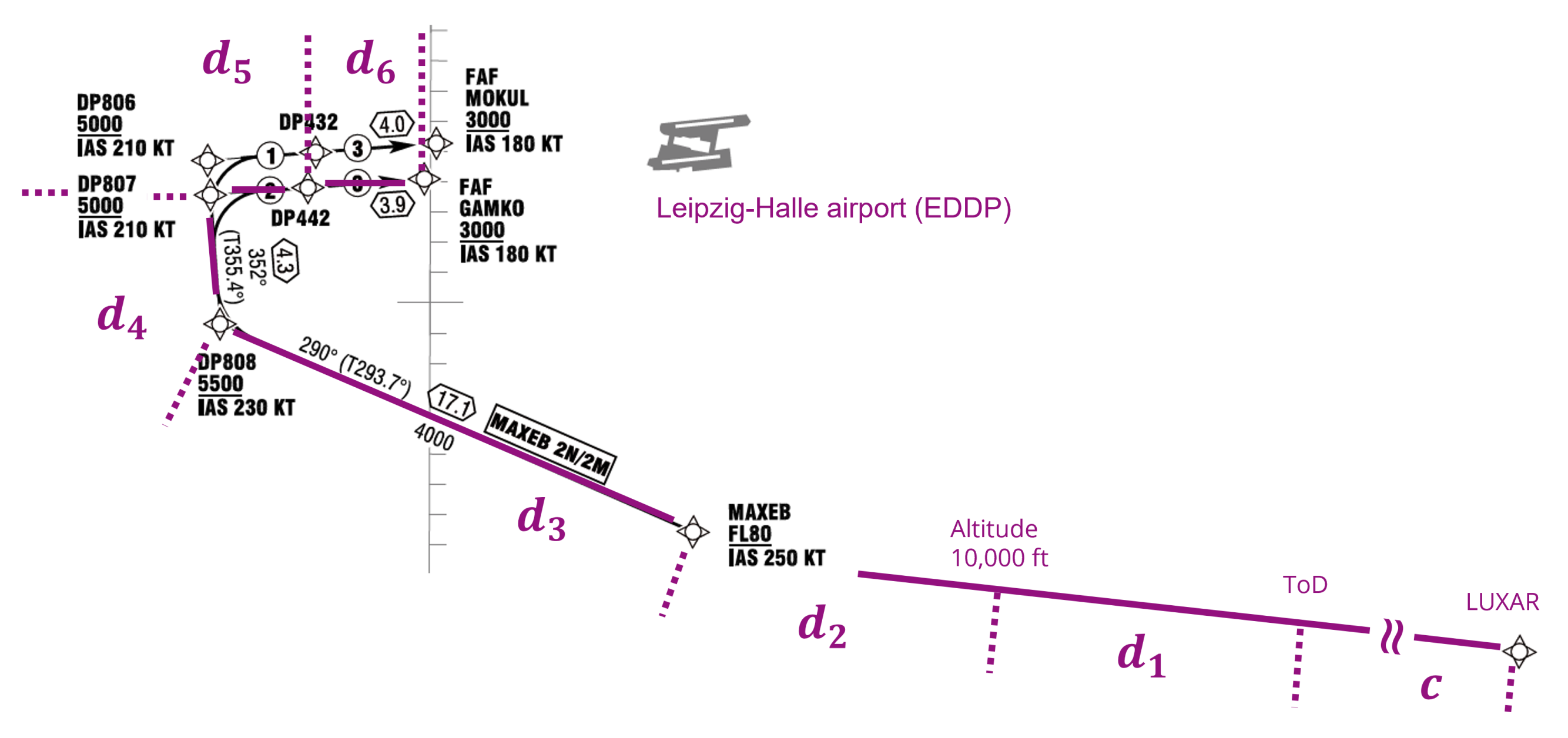
| Name | Coordinates | Altitude | Speed |
|---|---|---|---|
| MAXEB | N51 12.4 E012 13.9 | FL80 or above | IAS 250 kt |
| DP808 | N51 19.3 E011 48.9 | 5500 ft or above | IAS 230 kt |
| DP807 | N51 23.5 E011 48.4 | 5000 ft or above | IAS 210 kt |
| DP442 | N51 23.8 E011 53.5 | - | - |
| GAMKO (FAF) | N51 24.1 E011 59.7 | 3000 ft or above | IAS 180 kt |
| States | Symbols | Conditions |
|---|---|---|
| Along-track distance | 0 m | |
| Coordinates | (N495548.00, E0211031.00) | |
| Altitude | 35,000 ft | |
| Mass | 63,700 kg | |
| Time | 0 s |
| Phase | Description | Path Constraints | Final Conditions |
|---|---|---|---|
| c | Cruise | ||
| , , | |||
| ToD to 10,000 ft | h = 10,000 ft | ||
| 230 kt 250 kt | |||
| 10,000 ft to MAXEB | 230 kt 250 kt | ||
| FL80, 250 kt | |||
| MAXEB to DP808 | 230 kt 250 kt | ||
| 5500 ft, 230 kt | |||
| DP808 to DP807 | 210 kt 230 kt | ||
| 5000 ft, 210 kt | |||
| DP807 to DP442 | 180 kt 210 kt | ||
| 3000 ft | |||
| DP442 to GAMKO | 180 kt 210 kt | ||
| 3000 ft, 180 kt |
| Controls | Symbols | Lower Bounds | Upper Bounds |
|---|---|---|---|
| Thrust coefficient | |||
| Flight path angle | −4 | 0 | |
| Heading | −180 deg | 180 deg | |
| Speed brake | 0 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamo, S.; Rosenow, J.; Fricke, H.; Soler, M. Fundamental Framework to Plan 4D Robust Descent Trajectories for Uncertainties in Weather Prediction. Aerospace 2022, 9, 109. https://doi.org/10.3390/aerospace9020109
Kamo S, Rosenow J, Fricke H, Soler M. Fundamental Framework to Plan 4D Robust Descent Trajectories for Uncertainties in Weather Prediction. Aerospace. 2022; 9(2):109. https://doi.org/10.3390/aerospace9020109
Chicago/Turabian StyleKamo, Shumpei, Judith Rosenow, Hartmut Fricke, and Manuel Soler. 2022. "Fundamental Framework to Plan 4D Robust Descent Trajectories for Uncertainties in Weather Prediction" Aerospace 9, no. 2: 109. https://doi.org/10.3390/aerospace9020109