
Clap-and-Fling Mechanism in Non-Zero Inflow of a Tailless Two-Winged Flapping-Wing Micro Air Vehicle




Abstract
:1. Introduction
2. Materials and Methods
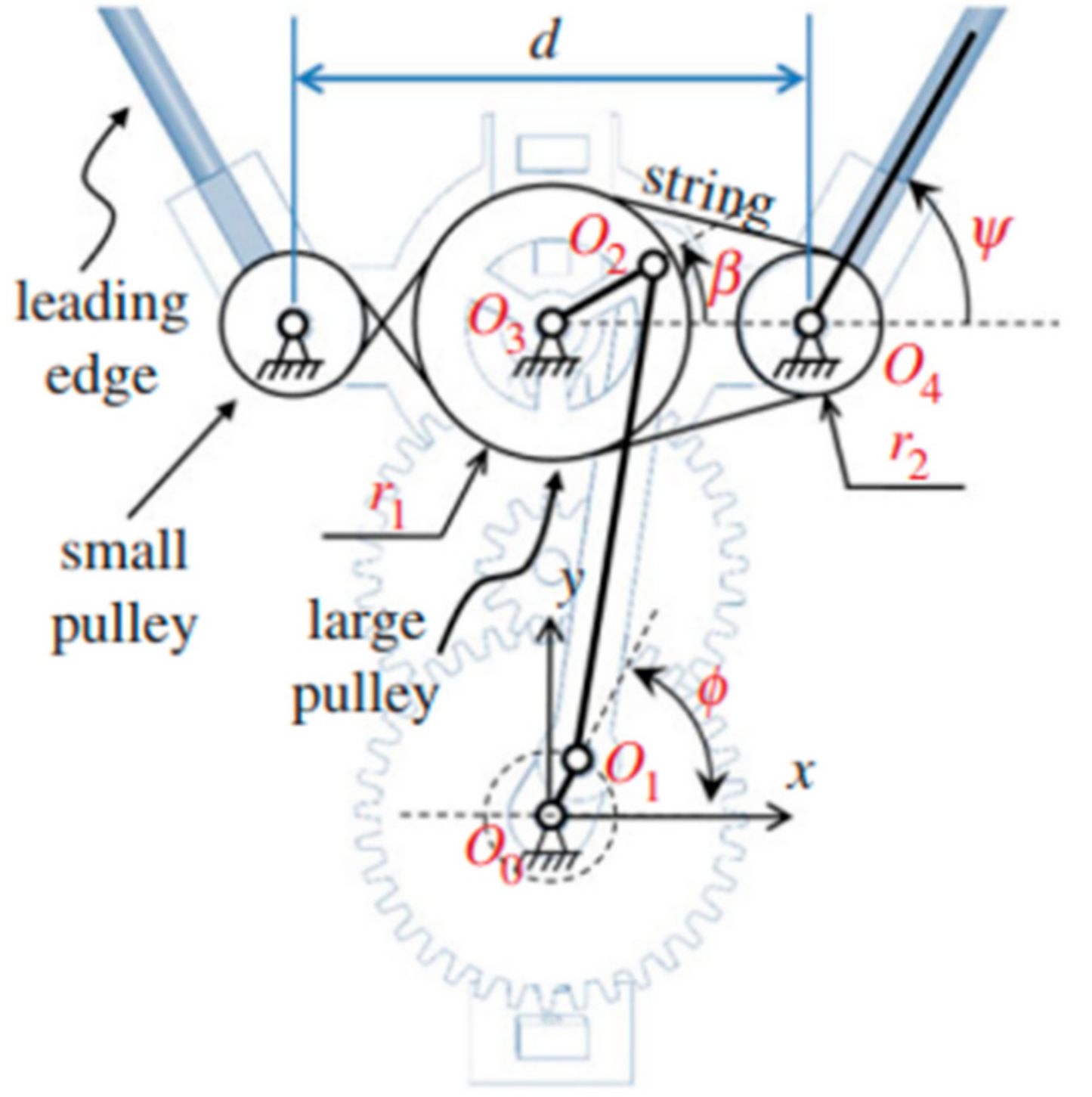
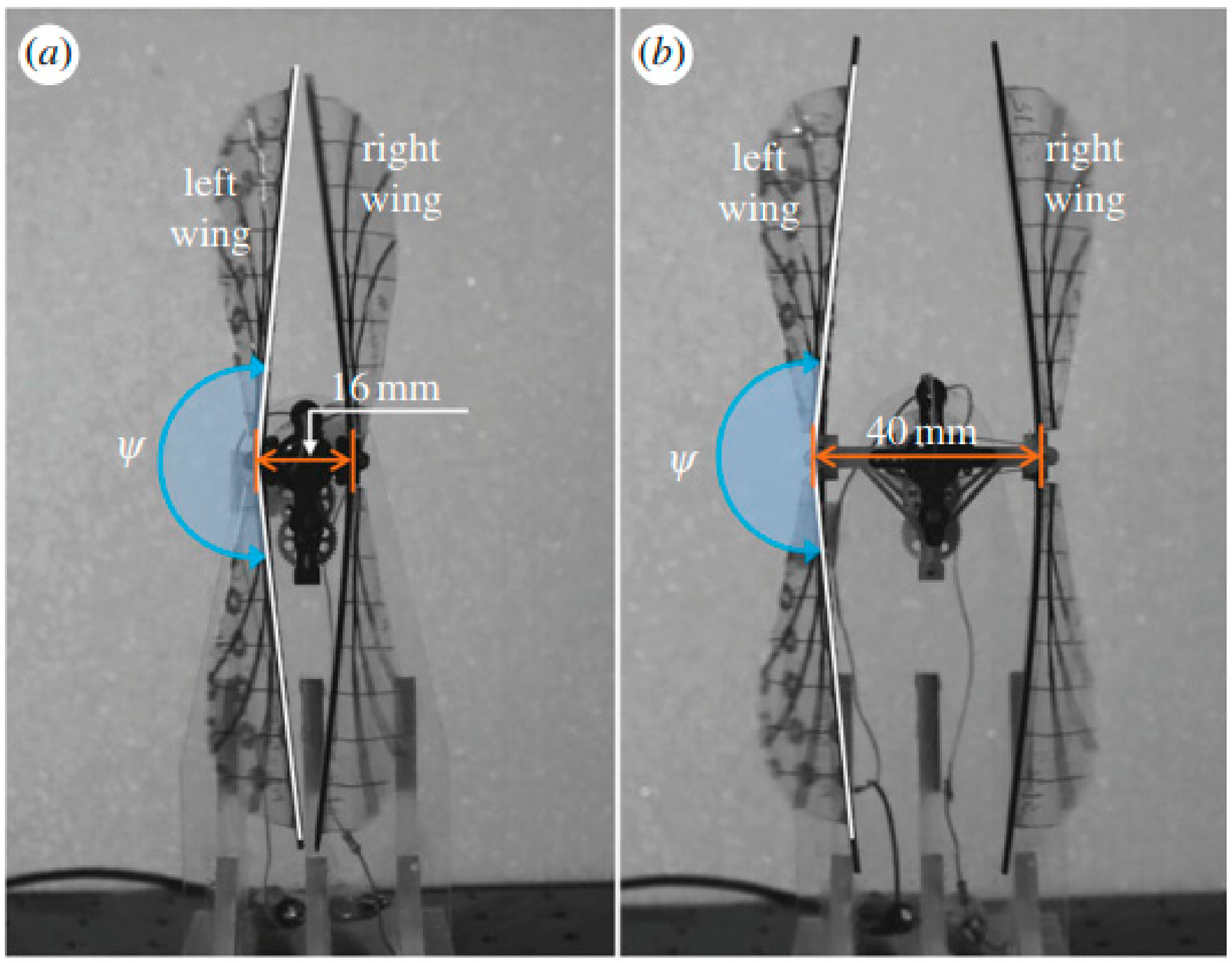
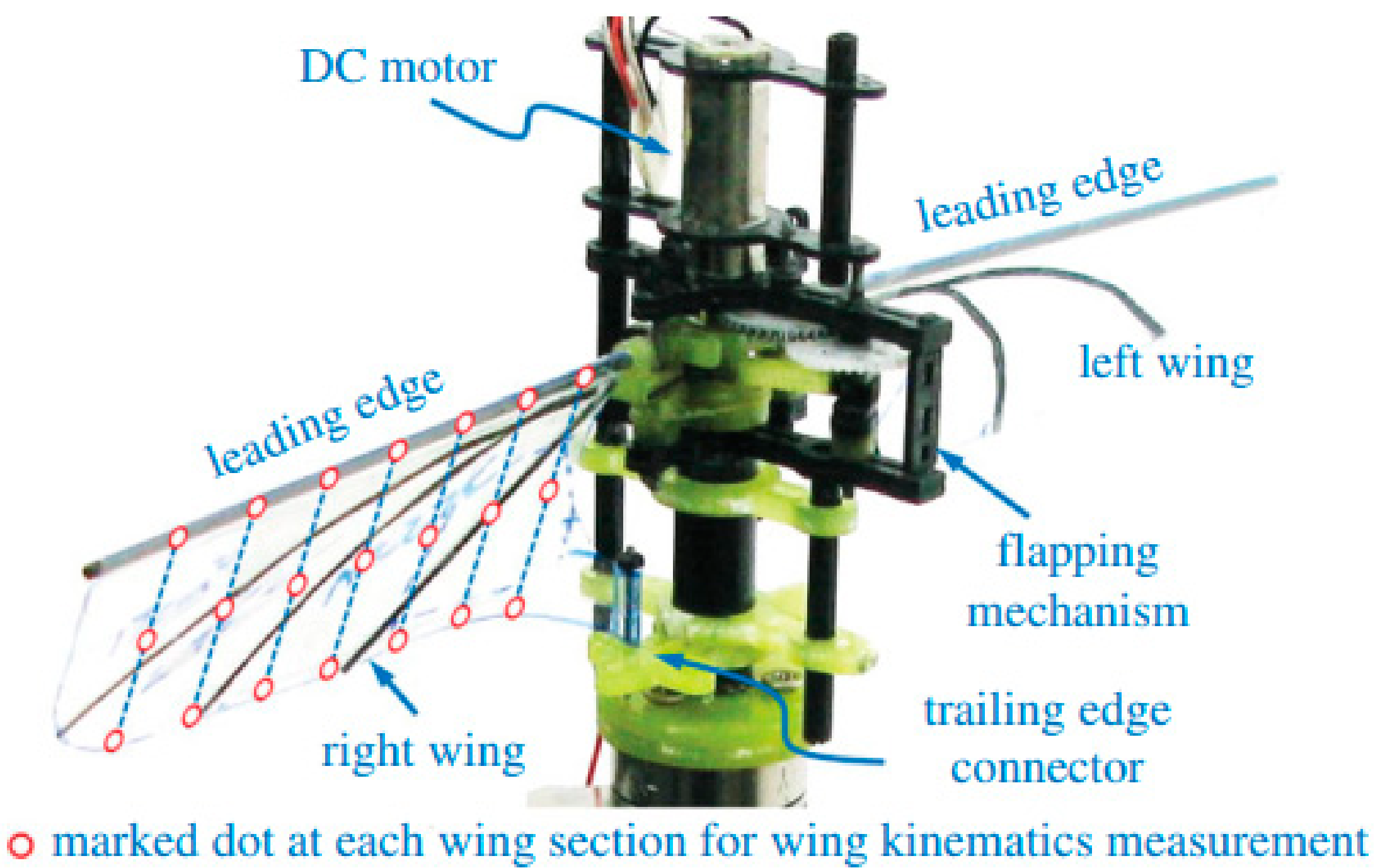
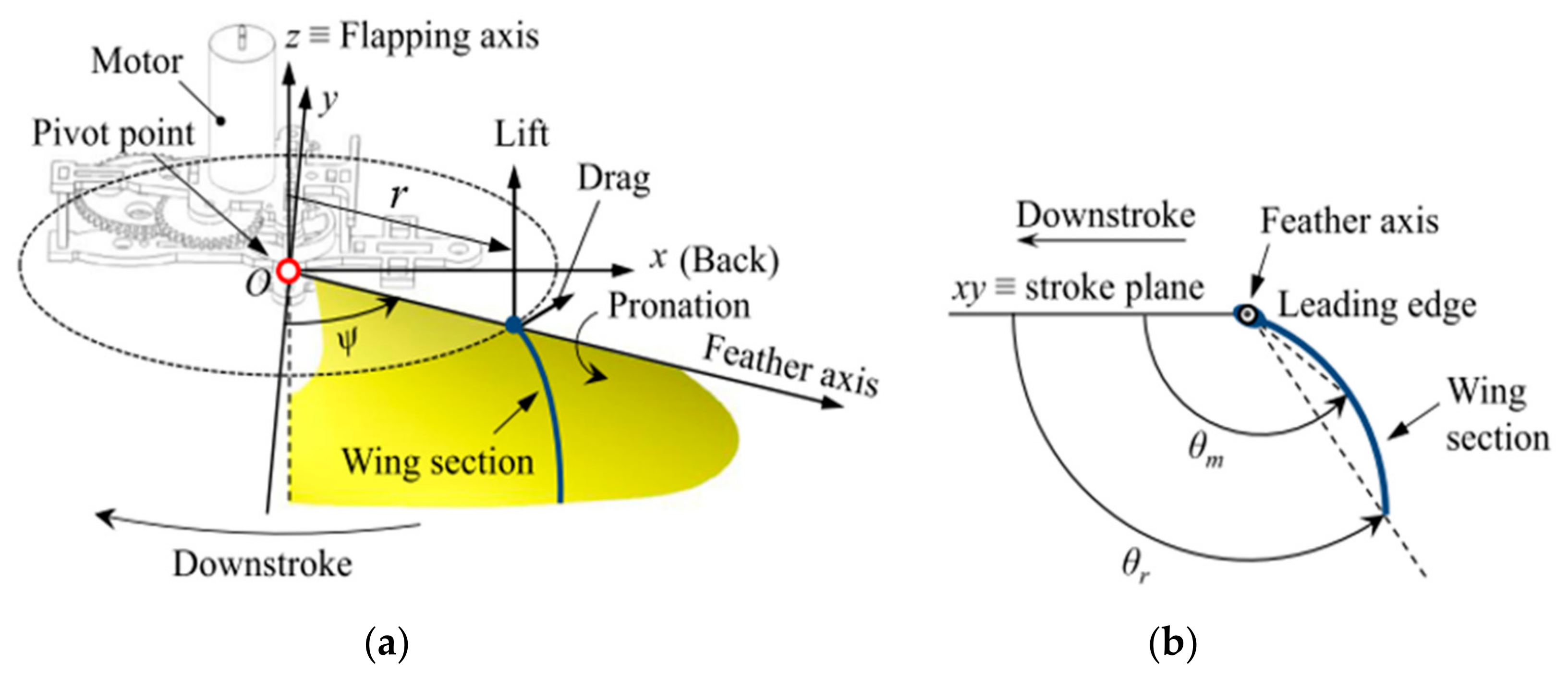
2.1. Flapping Mechanism
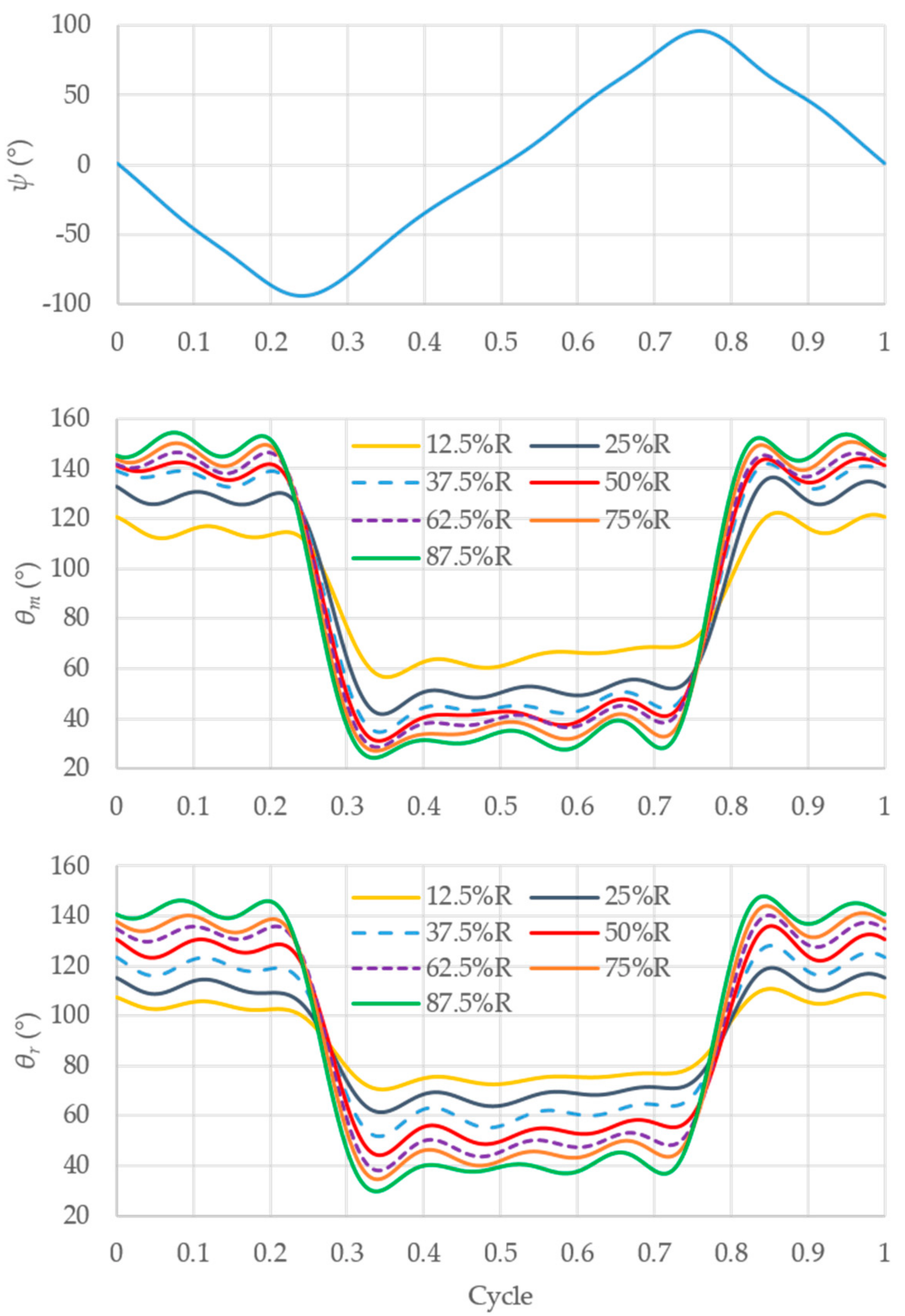
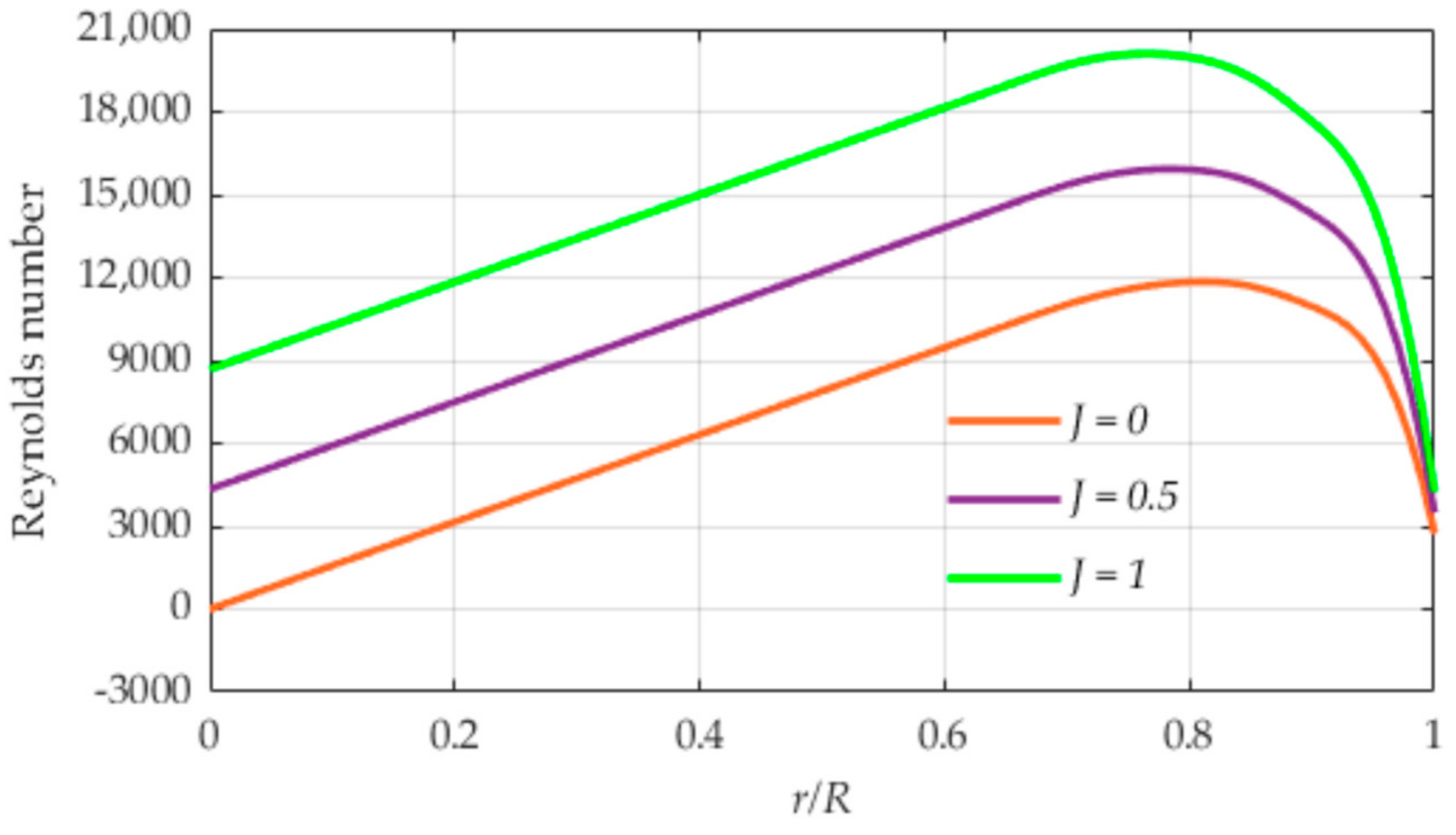
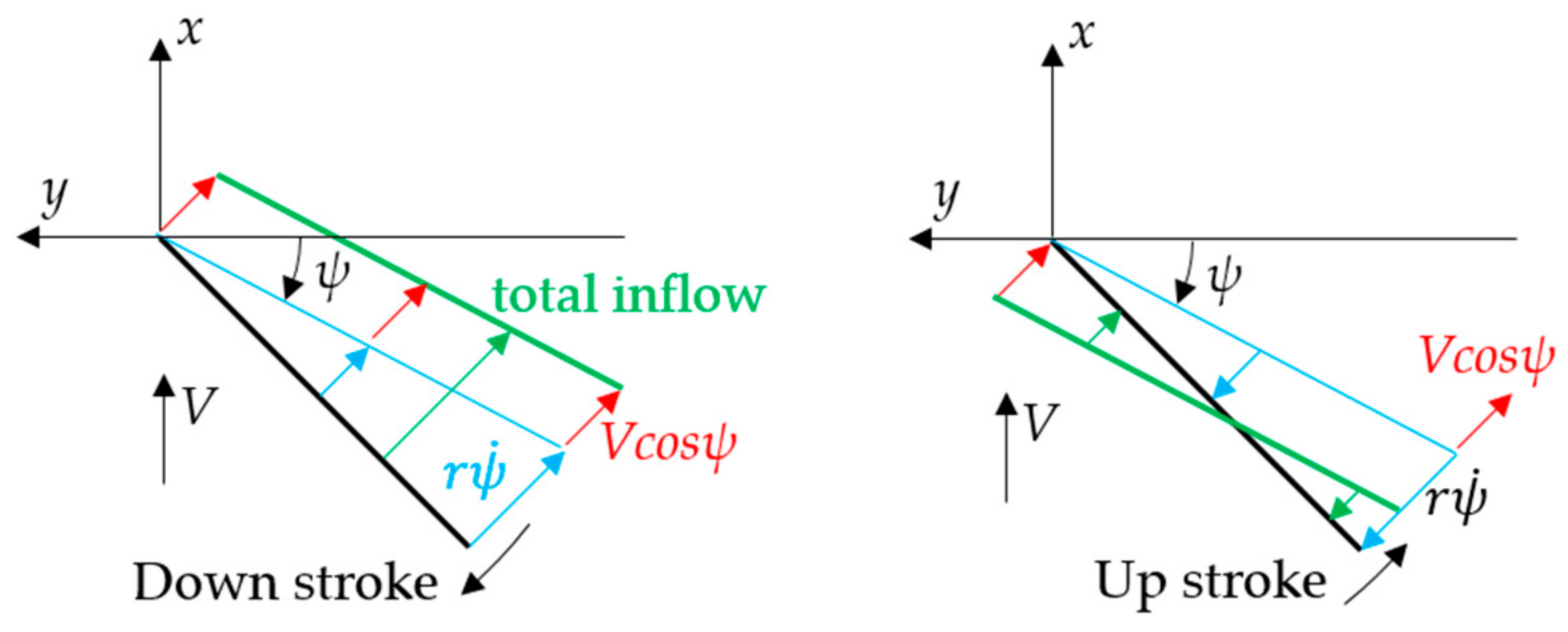
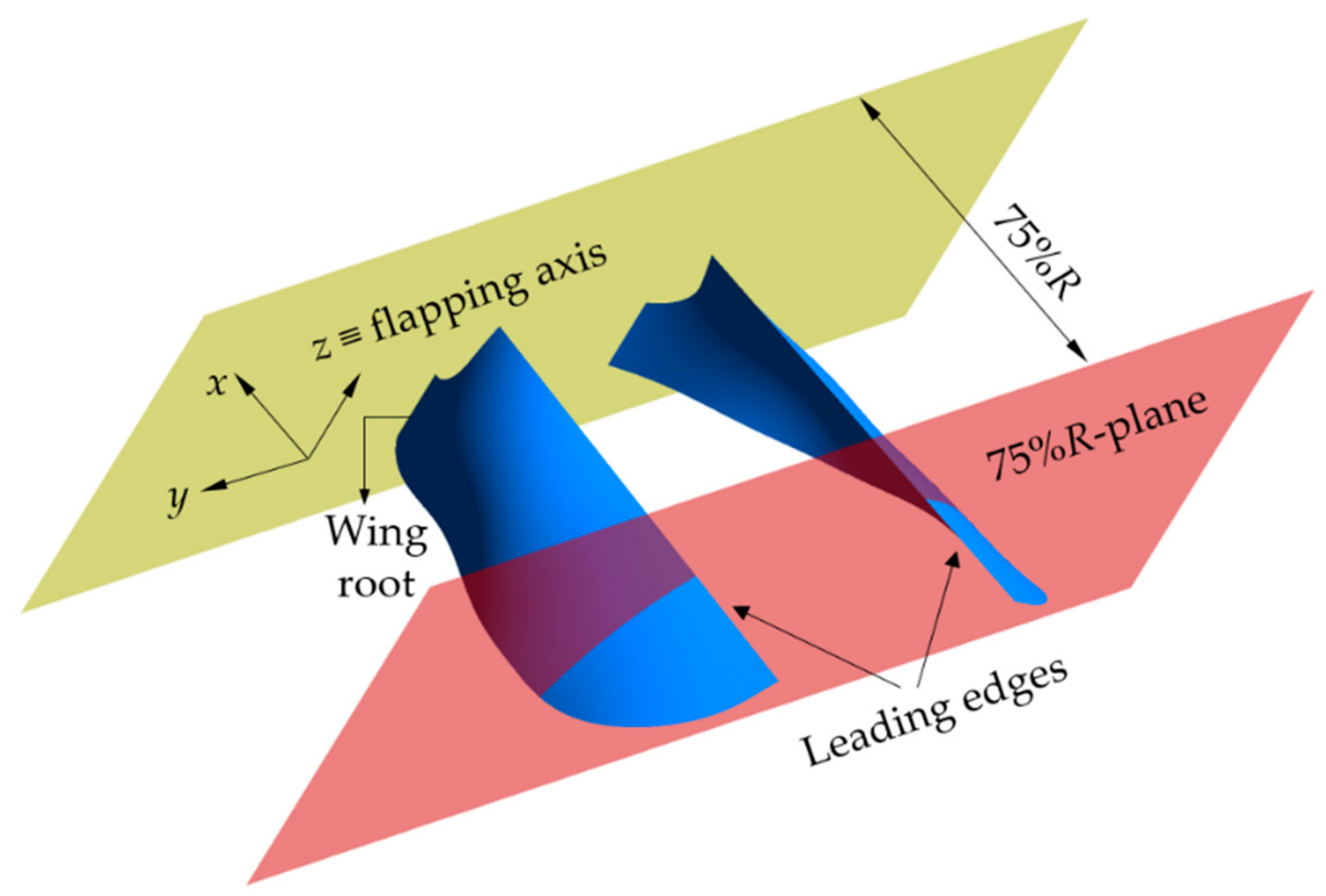
2.2. Wing Kinematics
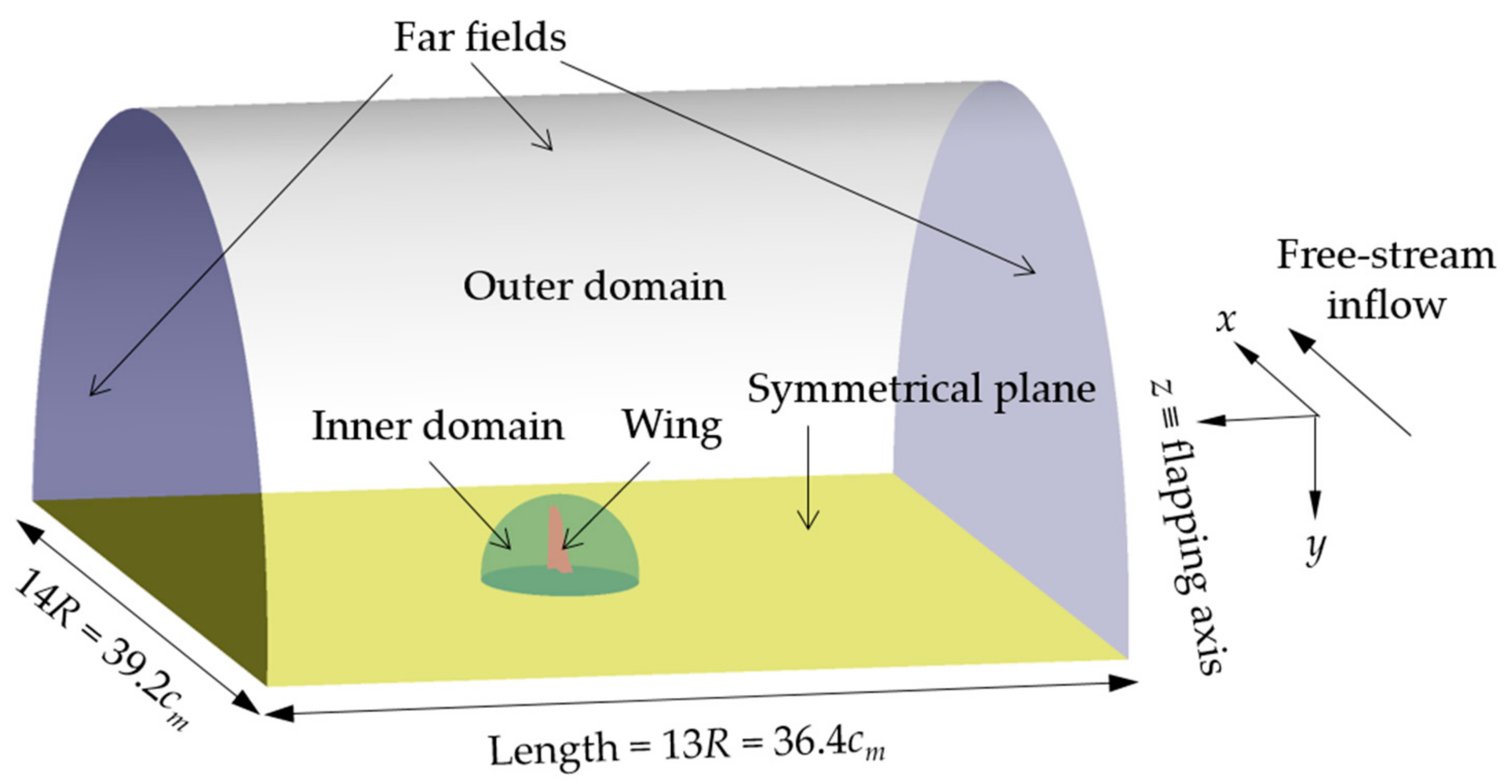
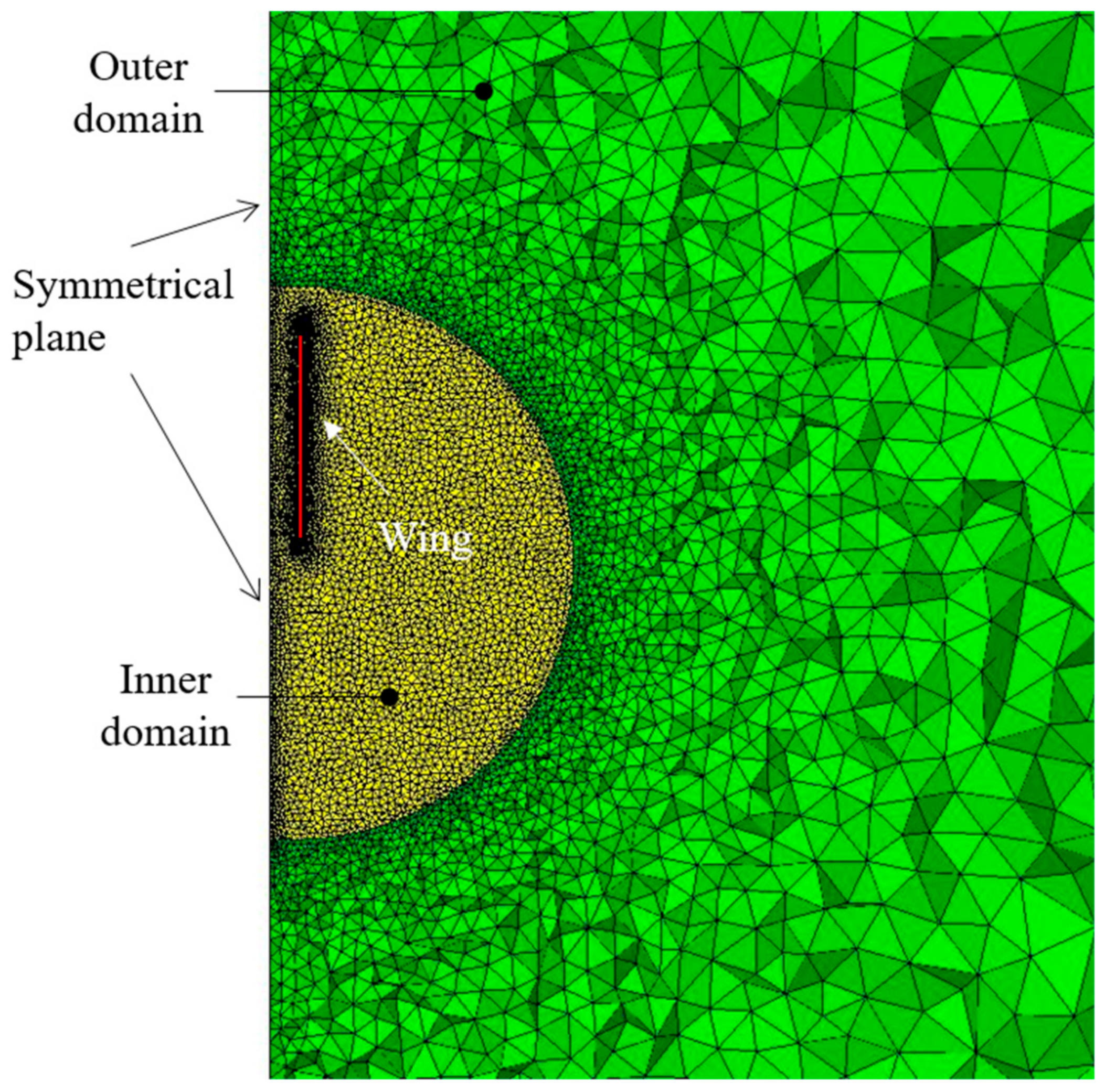
2.3. CFD Model
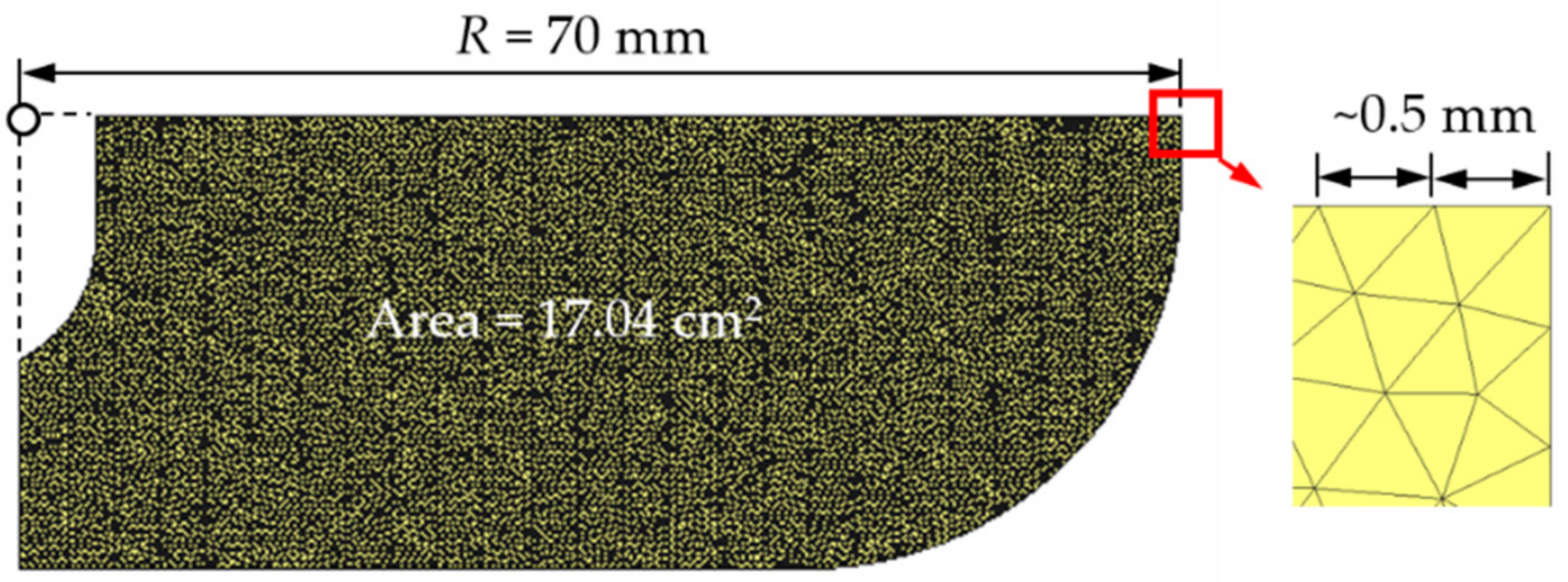
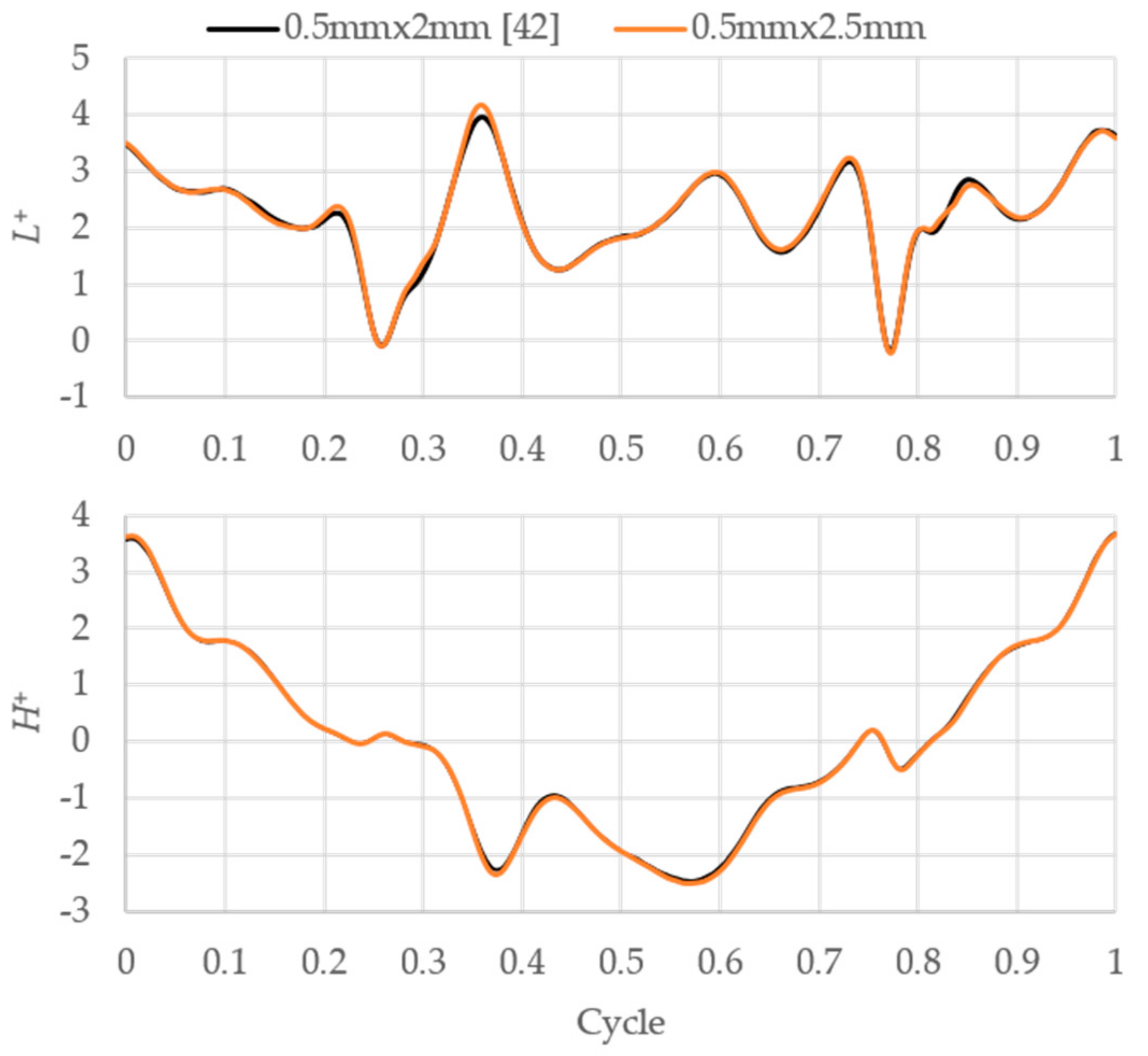
2.4. Grid-Independence Test and Validation
3. Results
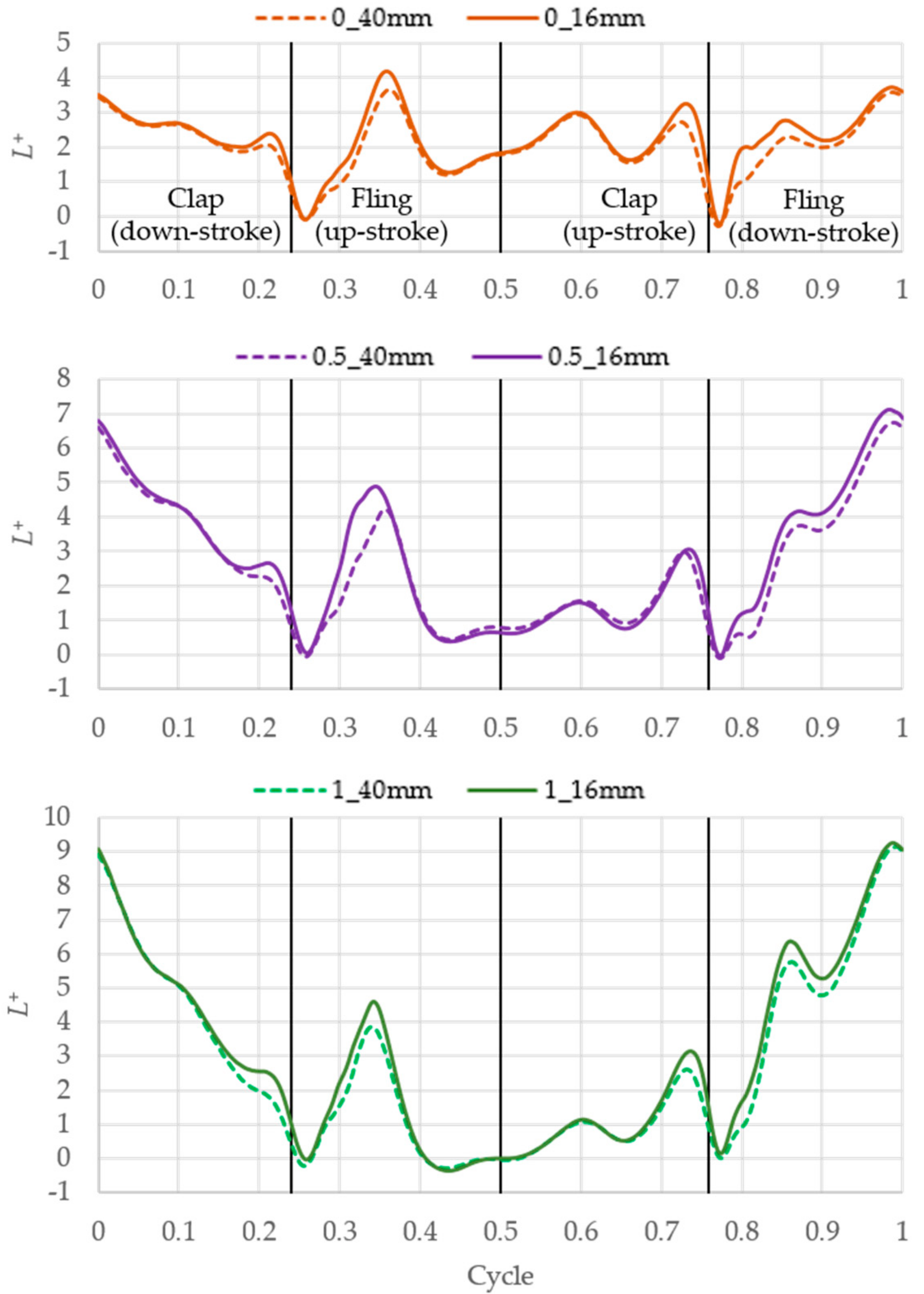
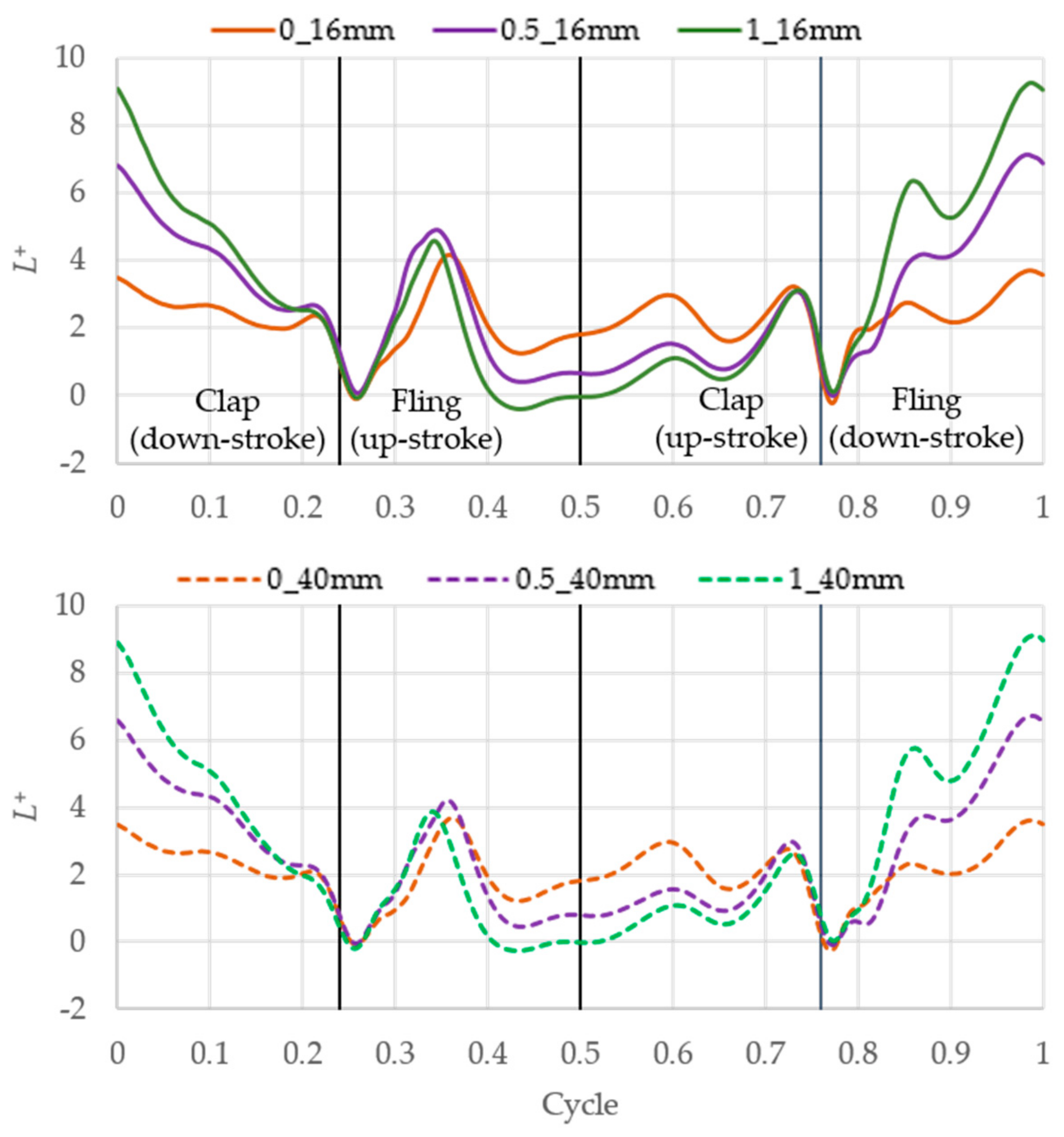
3.1. Effect of Clap-and-Fling on Lift Generation in Various Horizontal Free-Stream Inflow Speeds
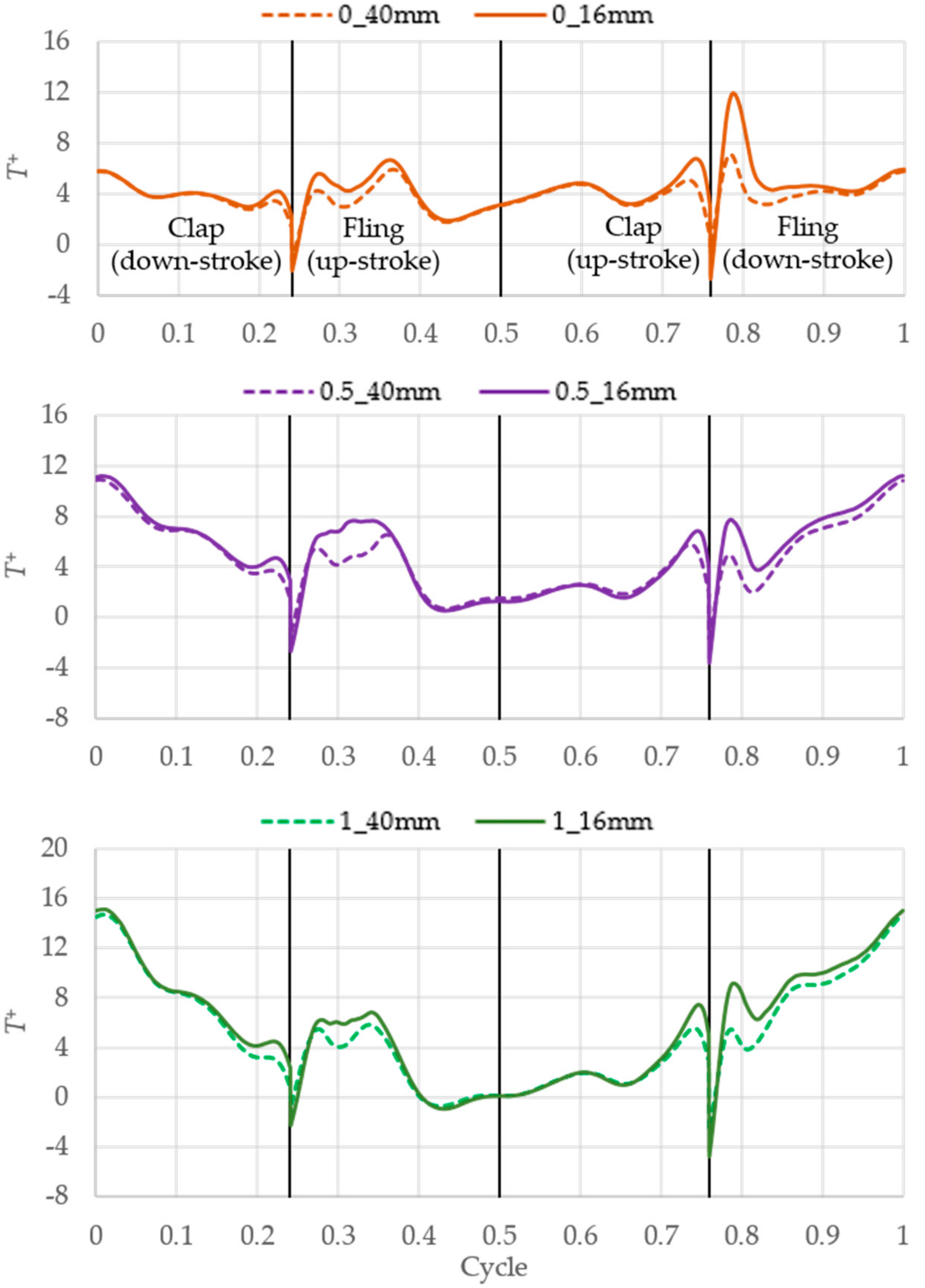
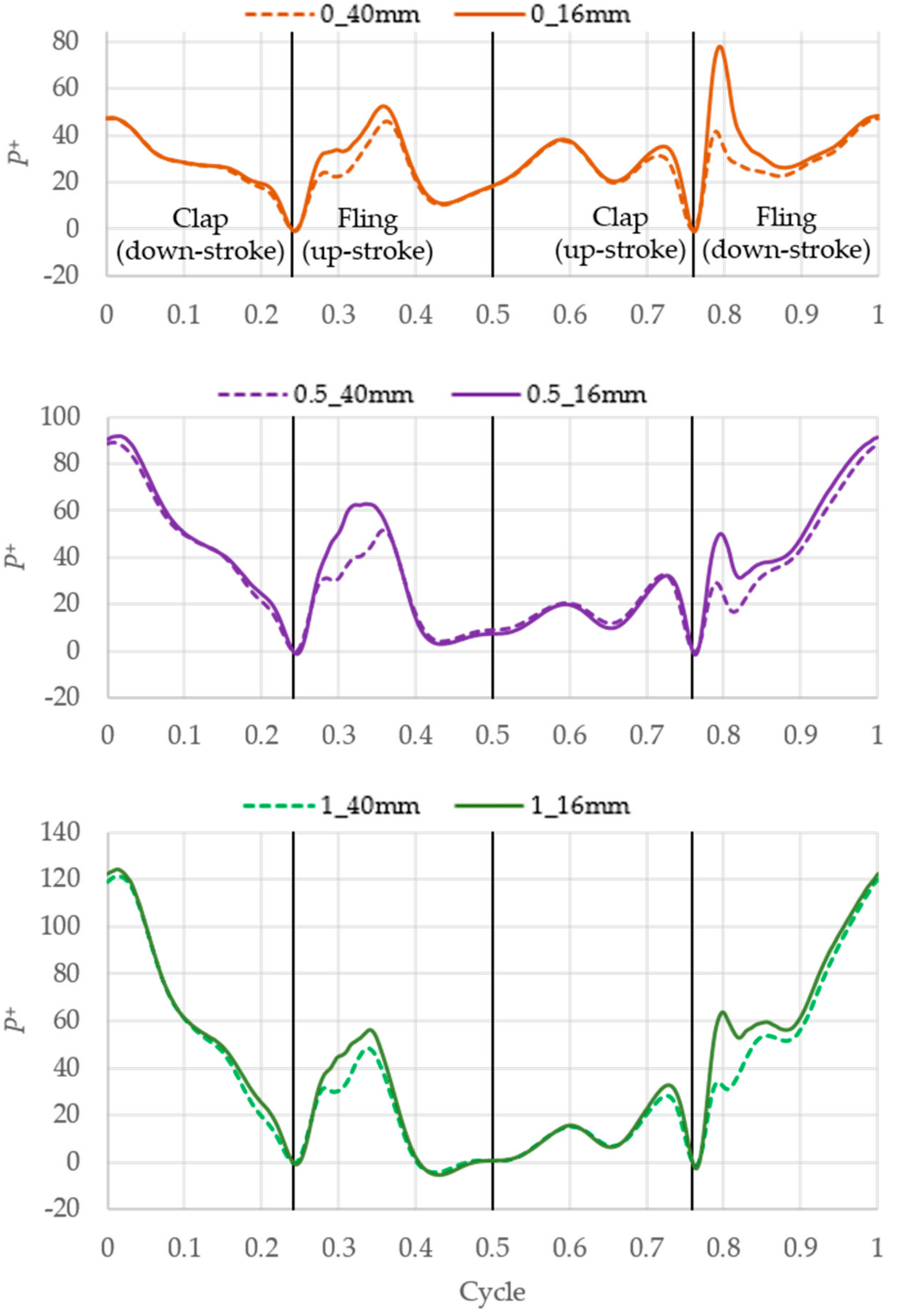
3.2. Effect of Clap-and-Fling on Torque and Aerodynamic Power Consumption
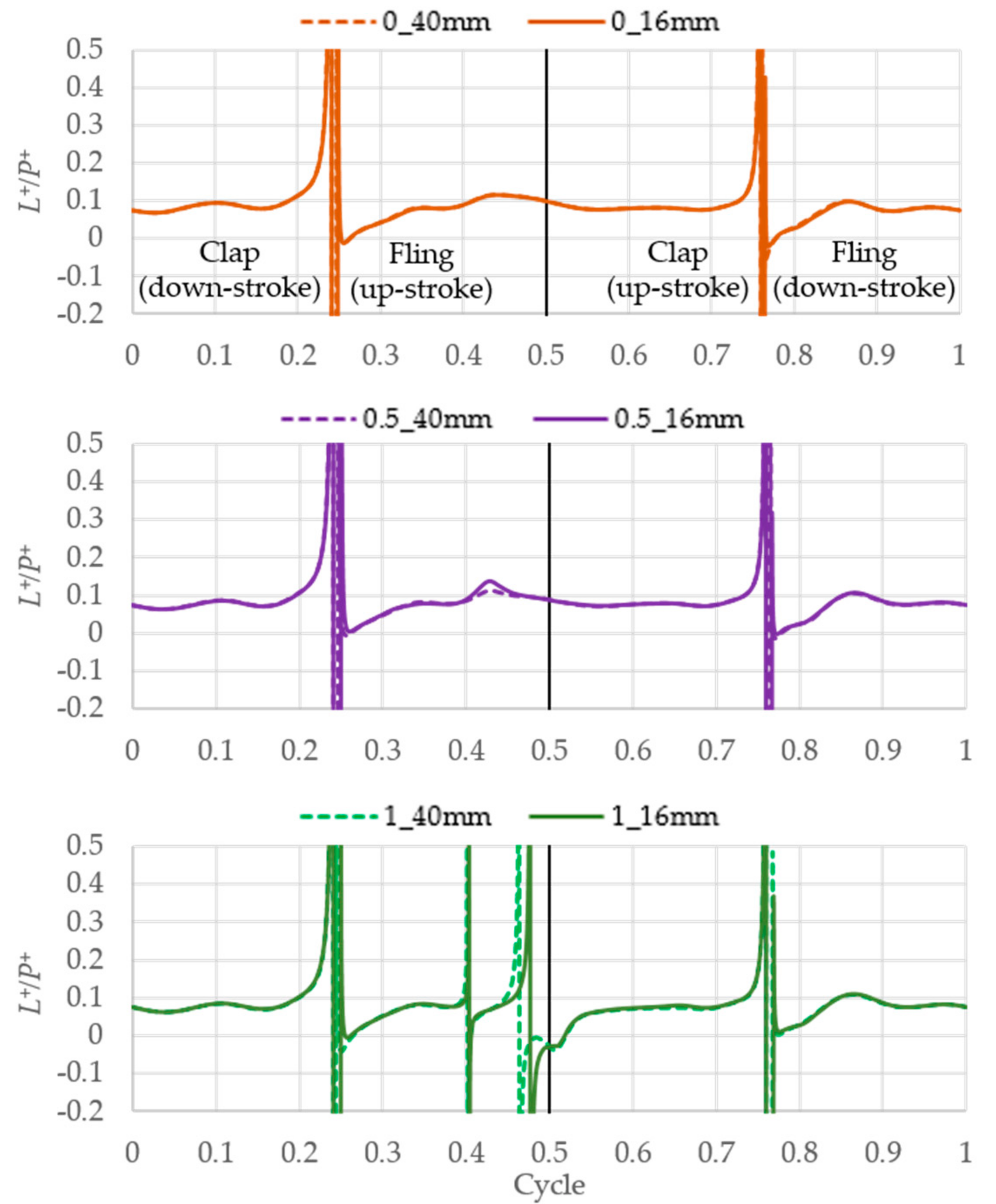
3.3. Effect of Clap-and-Fling on Aerodynamic Efficiency
4. Discussion
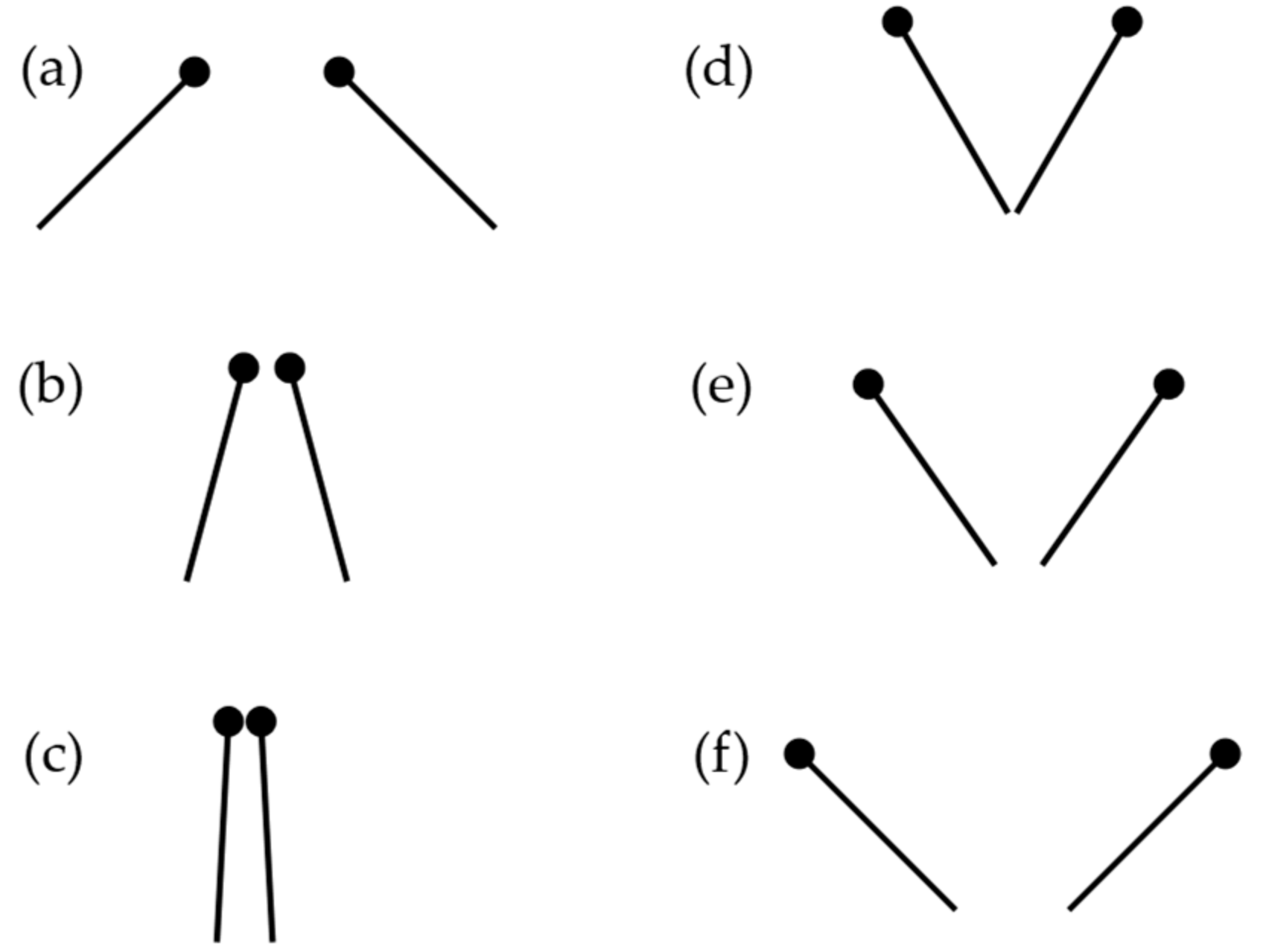
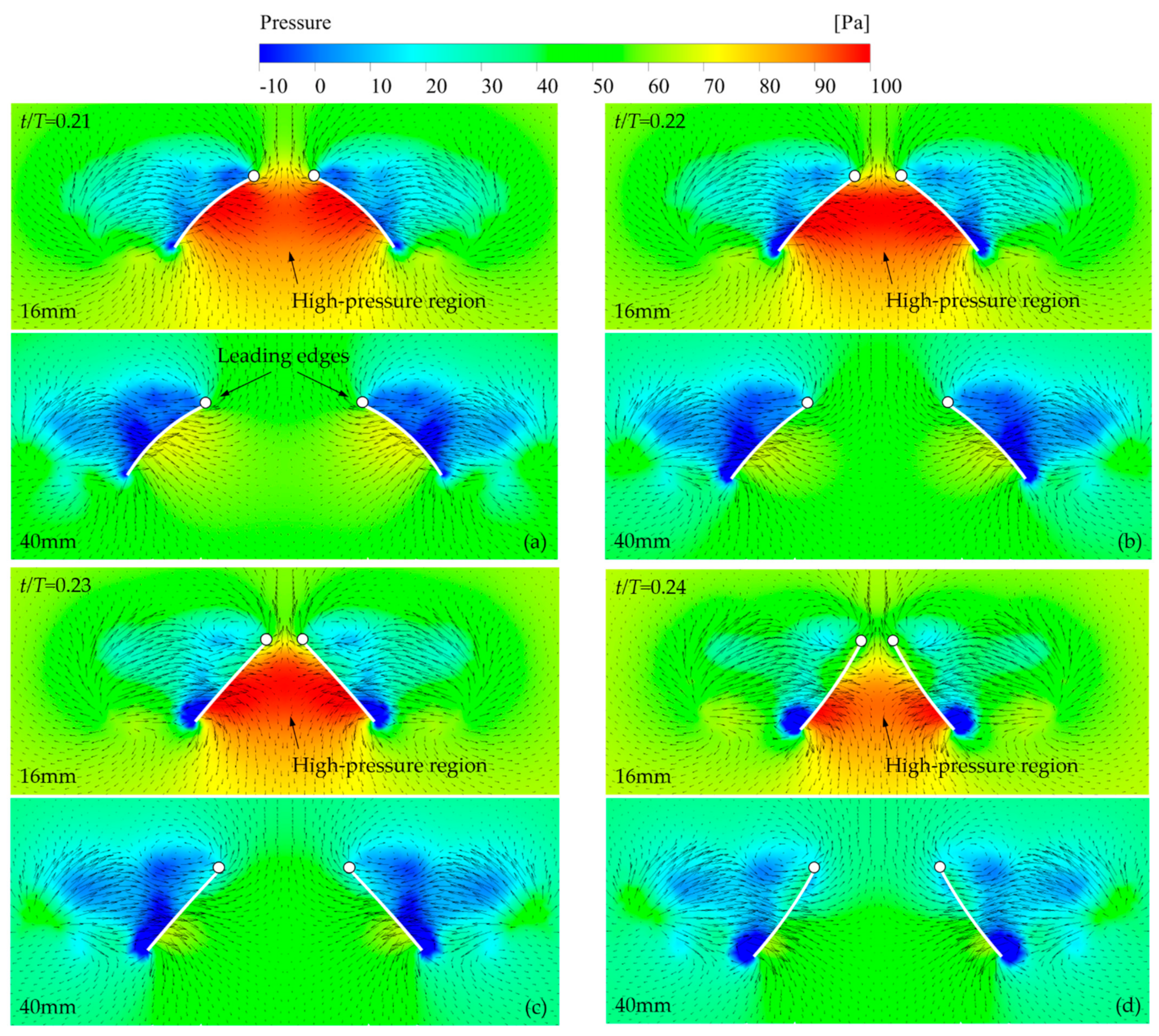
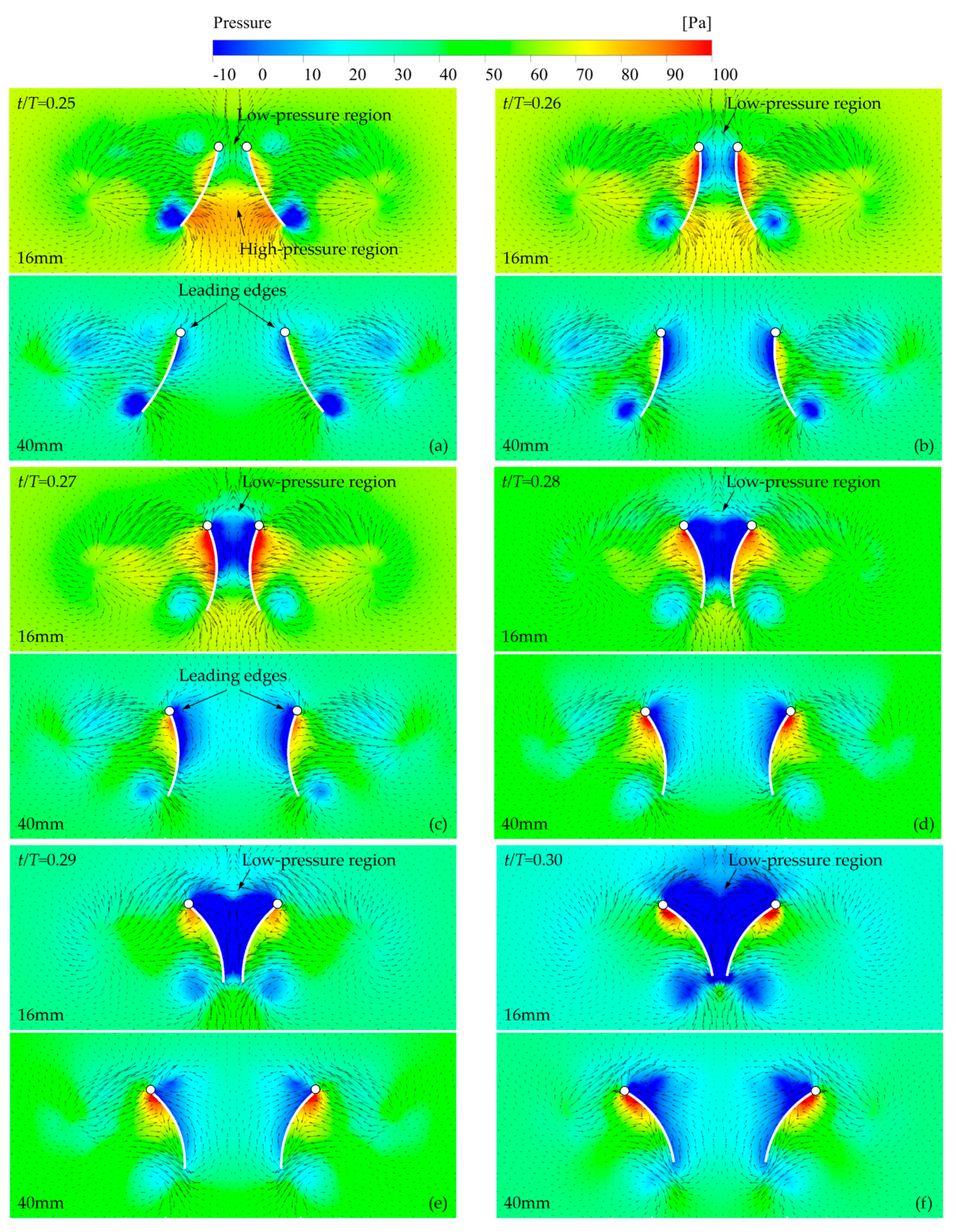
4.1. Force Augmentation Mechanism by Clap-and-Fling Effect
4.2. Influence of Free-Stream Inflow on Clap-and-Fling Effect
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| ψ | flapping angle |
| Ψ | flapping amplitude |
| c | local chord length |
| cm | mean chord length |
| f | flapping frequency |
| J | advance ratio |
| L | lift |
| P | aerodynamic power consumption |
| R | wing length |
| r | span-wise position |
| Rm | radius of the second moment of inertia of the wing |
| S | area of one wing |
| T | torque |
| V | free-stream inflow speed |
| Vm | average translational speed of a wing section at span-wise position r |
| ν | kinematic viscosity of air |
| ρ | air density |
References
- Shyy, W.; Berg, M.; Ljungqvist, D. Flapping and Flexible Wings for Biological and Micro Air Vehicles. Prog. Aerosp. Sci. 1999, 35, 455–505. [Google Scholar] [CrossRef]
- Keennon, M.; Klingebiel, K.; Won, H. Development of the Nano Hummingbird: A Tailless Flapping Wing Micro Air Vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting, Nashville, TN, USA, 9–12 January 2012; American Institute of Aeronautics and Astronautics: Nashville, TN, USA, 2012. [Google Scholar]
- Karásek, M.; Muijres, F.T.; De Wagter, C.; Remes, B.D.W.; de Croon, G.C.H.E. A Tailless Aerial Robotic Flapper Reveals that Flies Use Torque Coupling in Rapid Banked Turns. Science 2018, 361, 1089–1094. [Google Scholar] [CrossRef] [Green Version]
- Roshanbin, A.; Altartouri, H.; Karásek, M.; Preumont, A. COLIBRI: A Hovering Flapping Twin-Wing Robot. Int. J. Micro Air Veh. 2017, 9, 270–282. [Google Scholar] [CrossRef] [Green Version]
- Phan, H.V.; Kang, T.; Park, H.C. Design and Stable Flight of a 21 g Insect-like Tailless Flapping Wing Micro Air Vehicle with Angular Rates Feedback Control. Bioinspir. Biomim. 2017, 12, 17. [Google Scholar] [CrossRef] [PubMed]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled Flight of a Biologically Inspired, Insect-Scale Robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, Q.-V.; Chan, W.L. Development and Flight Performance of a Biologically-Inspired Tailless Flapping-Wing Micro Air Vehicle with Wing Stroke Plane Modulation. Bioinspir. Biomim. 2018, 14, 25. [Google Scholar] [CrossRef] [PubMed]
- Fei, F.; Tu, Z.; Zhang, J.; Deng, X. Learning Extreme Hummingbird Maneuvers on Flapping Wing Robots. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 109–115. [Google Scholar]
- Ellington, C.P. The Aerodynamics of Hovering Insect Flight. I. The Quasi-Steady Analysis. Phil. Trans. R. Soc. Lond. B 1984, 305, 1–15. [Google Scholar]
- Weis-Fogh, T. Quick Estimates of Flight Fitness in Hovering Animals, Including Novel Mechanisms for Lift Production. J. Exp. Biol. 1973, 59, 169–230. [Google Scholar] [CrossRef]
- Lighthill, M.J. On the Weis-Fogh Mechanism of Lift Generation. J. Fluid Mech. 1973, 60, 1–17. [Google Scholar] [CrossRef]
- Cooter, R.J.; Baker, P.S. Weis-Fogh Clap and Fling Mechanism in Locusta. Nature 1977, 269, 53–54. [Google Scholar] [CrossRef]
- Bennett, L. Clap and Fling Aerodynamics—An Experimental Evaluation. J. Exp. Biol. 1977, 69, 261–272. [Google Scholar] [CrossRef]
- Miller, L.A.; Peskin, C.S. A Computational Fluid Dynamics of ‘clap and Fling’ in the Smallest Insects. J. Exp. Biol. 2005, 208, 195–212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Miller, L.A.; Peskin, C.S. Flexible Clap and Fling in Tiny Insect Flight. J. Exp. Biol. 2009, 212, 3076–3090. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ellington, C.P. The Novel Aerodynamics of Insect Flight: Applications to Micro-Air Vehicles. J. Exp. Biol. 1999, 202, 3439–3448. [Google Scholar] [CrossRef] [PubMed]
- Marden, J.H. Maximum Lift Production during Takeoff in Flying Animals. J. Exp. Biol. 1987, 130, 235–258. [Google Scholar] [CrossRef]
- Maxworthy, T. Experiments on the Weis-Fogh Mechanism of Lift Generation by Insects in Hovering Flight Part 1. Dynamics of the ‘Fling’. J. Fluid Mech. 1979, 93, 47–63. [Google Scholar] [CrossRef]
- Spedding, G.R.; Maxworthy, T. The Generation of Circulation and Lift in a Rigid Two-Dimensional Fling. J. Fluid Mech. 1986, 165, 247–272. [Google Scholar] [CrossRef]
- Sun, M.; Yu, X. Flows around Two Airfoils Performing Fling and Subsequent Translation and Translation and Subsequent Clap. Acta Mech. Sin. 2003, 19, 103–117. [Google Scholar]
- Lehmann, F.-O.; Sane, S.P.; Dickinson, M. The Aerodynamic Effects of Wing–Wing Interaction in Flapping Insect Wings. J. Exp. Biol. 2005, 208, 3075–3092. [Google Scholar] [CrossRef] [Green Version]
- Ellington, C.P.; van den Berg, C.; Willmott, A.P.; Thomas, A.L.R. Leading-Edge Vortices in Insect Flight. Nature 1996, 384, 626–630. [Google Scholar] [CrossRef]
- Dickinson, M.H.; Lehmann, F.-O.; Sane, S.P. Wing Rotation and the Aerodynamic Basis of Insect Flight. Science 1999, 284, 1954–1960. [Google Scholar] [CrossRef] [PubMed]
- Birch, J.M.; Dickinson, M.H. Spanwise Flow and the Attachment of the Leading-Edge Vortex on Insect Wings. Nature 2001, 412, 729–733. [Google Scholar] [CrossRef]
- Sane, S.P.; Dickinson, M.H. The Aerodynamic Effects of Wing Rotation and a Revised Quasi-Steady Model of Flapping Flight. J. Exp. Biol. 2002, 205, 1087–1096. [Google Scholar] [CrossRef] [PubMed]
- Birch, J.M.; Dickinson, M.H. The Influence of Wing–Wake Interactions on the Production of Aerodynamic Forces in Flapping Flight. J. Exp. Biol. 2003, 206, 2257–2272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vogel, S. Life in Moving Fluids: The Physical Biology of Flow, 2nd ed.; Princeton University Press: Princeton, NJ, USA, 1996. [Google Scholar]
- Sane, S.P.; Dickinson, M.H. The Control of Flight Force by a Flapping Wing: Lift and Drag Production. J. Exp. Biol. 2001, 204, 2607–2626. [Google Scholar] [CrossRef]
- Minotti, F.O. Unsteady Two-Dimensional Theory of a Flapping Wing. Phys. Rev. E 2002, 66, 10. [Google Scholar] [CrossRef]
- Sane, S.P. The Aerodynamics of Insect Flight. J. Exp. Biol. 2003, 206, 4191–4208. [Google Scholar] [CrossRef] [Green Version]
- Weis-Fogh, T. Unusual Mechanisms for the Generation of Lift in Flying Animals. Sci. Am. 1975, 233, 80–87. [Google Scholar] [CrossRef]
- Ellington, C.P. Wing Mechanics and Take-Off Preparation of Thrips (Thysanoptera). J. Exp. Biol. 1980, 85, 129–136. [Google Scholar] [CrossRef]
- Srygley, R.B.; Thomas, A.L.R. Unconventional Lift-Generating Mechanisms in Free-Flying Butterflies. Nature 2002, 420, 660–664. [Google Scholar] [CrossRef]
- Ennos, A.R. The Kinematics and Aerodynamics of the Free Flight of Some Diptera. J. Exp. Biol. 1989, 142, 49–85. [Google Scholar] [CrossRef]
- Götz, K.G. Course-Control, Metabolism and Wing Interference During Ultralong Tethered Flight in Drosophila Melanogaster. J. Exp. Biol. 1987, 128, 35–46. [Google Scholar] [CrossRef]
- Brackenbury, J. Wing Kinematics during Natural Leaping in the Mantids Mantis Religiosa and Iris Oratoria. J. Zool. 1991, 223, 341–356. [Google Scholar] [CrossRef]
- Ellington, C.P. The Aerodynamics of Hovering Insect Flight. III. Kinematics. Phil. Trans. R. Soc. Lond. B 1984, 305, 41–78. [Google Scholar]
- Johansson, L.C.; Henningsson, P. Butterflies Fly Using Efficient Propulsive Clap Mechanism Owing to Flexible Wings. J. R. Soc. Interface 2021, 18, 10. [Google Scholar] [CrossRef]
- Groen, M.; Bruggeman, B.; Remes, B.D.W.; Ruijsink, H.; van Oudheusden, B.; Bijl, H. Improving Flight Performance of the Flapping Wing MAV Delfly II. In Proceedings of the International Micro Air Vehicle Conference and Flight Competition, Braunschweig, Germany, 6–8 July 2010. [Google Scholar]
- Zdunich, P.; Bilyk, D.; MacMaster, M.; Loewen, D.; DeLaurier, J.; Kornbluh, R.; Low, T.; Stanford, S.; Holeman, D. Development and Testing of the Mentor Flapping-Wing Micro Air Vehicle. J. Aircr. 2007, 44, 1701–1711. [Google Scholar] [CrossRef]
- Nguyen, Q.-V.; Chan, W.L.; Debiasi, M. Design, Fabrication, and Performance Test of a Hovering-Based Flapping-Wing Micro Air Vehicle Capable of Sustained and Controlled Flight. In Proceedings of the International Micro Air Vehicle Conference and Competition (IMAV 2014), Delf, The Netherlands, 12–15 August 2014. [Google Scholar]
- Phan, H.V.; Au, T.K.L.; Park, H.C. Clap-and-Fling Mechanism in a Hovering Insect-like Two-Winged Flapping-Wing Micro Air Vehicle. R. Soc. Open Sci. 2016, 3, 18. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, K.; Au, L.T.K.; Phan, H.-V.; Park, S.H.; Park, H.C. Effects of Wing Kinematics, Corrugation, and Clap-and-Fling on Aerodynamic Efficiency of a Hovering Insect-Inspired Flapping-Wing Micro Air Vehicle. Aerosp. Sci. Technol. 2021, 118, 11. [Google Scholar] [CrossRef]
- Au, L.T.K.; Phan, H.V.; Park, S.H.; Park, H.C. Effect of Corrugation on the Aerodynamic Performance of Three-Dimensional Flapping Wings. Aerosp. Sci. Technol. 2020, 105, 11. [Google Scholar] [CrossRef]
- Truong, T.Q.; Phan, V.H.; Park, H.C.; Ko, J.H. Effect of Wing Twisting on Aerodynamic Performance of Flapping Wing System. AIAA J. 2013, 51, 1612–1620. [Google Scholar] [CrossRef]
- Au, L.T.K.; Phan, H.V.; Park, H.C. Comparison of Aerodynamic Forces and Moments Calculated by Three-Dimensional Unsteady Blade Element Theory and Computational Fluid Dynamics. J. Bionic Eng. 2017, 14, 746–758. [Google Scholar] [CrossRef]
- Au, L.T.K.; Phan, V.H.; Park, H.C. Longitudinal Flight Dynamic Analysis on Vertical Takeoff of a Tailless Flapping-Wing Micro Air Vehicle. J. Bionic Eng. 2018, 15, 283–297. [Google Scholar] [CrossRef]
- Xiong, Y.; Sun, M. Dynamic Flight Stability of a Bumblebee in Forward Flight. Acta Mech. Sin. 2008, 24, 25–36. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CFD Model | Grid | CD 1 | L+, 16 mm | L+, 40 mm | ||
|---|---|---|---|---|---|---|
| Divided | Length | Diameter | ||||
| Previous [42] | 0.5 mm × 2 mm | no | 33.6cm | 33.6cm | 2.27 (3.2%) | 2.04 (7.5%) |
| Current | 0.5 mm × 2.5 mm | yes | 36.4cm | 39.2cm | 2.24 (2.0%) | 2.04 (7.8%) |
| L+ | J = 0 | J = 0.5 | J = 1 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 40 mm | 16 mm | Enhancement | Contribution | 40 mm | 16 mm | Enhancement | Contribution | 40 mm | 16 mm | Enhance | Contribution | |
| Clap (down) | 0.57 | 0.59 | 0.02 (1.1%) | 11.2% | 0.89 | 0.94 | 0.04 (1.7%) | 18.6% | 1.05 | 1.10 | 0.05 (1.9%) | 20.6% |
| Fling (up) | 0.43 | 0.48 | 0.06 (2.8%) | 28.4% | 0.40 | 0.48 | 0.08 (3.3%) | 34.9% | 0.25 | 0.31 | 0.06 (2.2%) | 23.9% |
| Clap (up) | 0.56 | 0.61 | 0.04 (2.1%) | 21.2% | 0.37 | 0.36 | −0.01 (−0.5%) | −5.0% | 0.25 | 0.28 | 0.03 (1.1%) | 12.5% |
| Fling (down) | 0.48 | 0.56 | 0.08 (3.9%) | 39.2% | 0.80 | 0.92 | 0.12 (4.8%) | 51.4% | 1.14 | 1.25 | 0.11 (3.9%) | 43.0% |
| Total (cycle) | 2.04 | 2.24 | 0.20 (9.9%) | 100% | 2.47 | 2.70 | 0.23 (9.4%) | 100% | 2.70 | 2.94 | 0.25 (9.1%) | 100% |
| T+ | J = 0 | J = 0.5 | J = 1 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 40 mm | 16 mm | Enhancement | Contribution | 40 mm | 16 mm | Enhancement | Contribution | 40 mm | 16 mm | Enhancement | Contribution | |
| Clap (down) | 0.93 | 0.96 | 0.03 (0.9%) | 6.5% | 1.54 | 1.63 | 0.09 (2.1%) | 19.5% | 1.89 | 2.00 | 0.11 (2.2%) | 20.5% |
| Fling (up) | 0.85 | 0.99 | 0.13 (3.5%) | 26.3% | 0.84 | 0.98 | 0.14 (3.2%) | 29.7% | 0.60 | 0.69 | 0.09 (1.7%) | 16.4% |
| Clap (up) | 1.02 | 1.12 | 0.09 (2.4%) | 18.1% | 0.71 | 0.71 | −0.01 (−0.1%) | −1.3% | 0.52 | 0.58 | 0.06 (1.3%) | 12.1% |
| Fling (down) | 1.03 | 1.28 | 0.25 (6.5%) | 49.1% | 1.43 | 1.68 | 0.25 (5.5%) | 52.1% | 1.97 | 2.24 | 0.27 (5.4%) | 51.1% |
| Cycle | 3.83 | 4.34 | 0.51 (13.3%) | 100% | 4.52 | 5.00 | 0.48 (10.6%) | 100% | 4.98 | 5.50 | 0.52 (10.5%) | 100% |
| P+ | J = 0 | J = 0.5 | J = 1 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 40 mm | 16 mm | Enhancement | Contribution | 40 mm | 16 mm | Enhancement | Contribution | 40 mm | 16 mm | Enhancement | Contribution | |
| Clap (down) | 6.7 | 6.8 | 0.11 (0.4%) | 3.5% | 11.4 | 12.0 | 0.53 (1.7%) | 15.7% | 14.4 | 14.9 | 0.55 (1.5%) | 15.7% |
| Fling (up) | 5.7 | 6.7 | 0.98 (3.7%) | 30.2% | 5.8 | 7.1 | 1.27 (3.9%) | 37.3% | 4.2 | 5.0 | 0.81 (2.2%) | 23.0% |
| Clap (up) | 6.8 | 7.2 | 0.36 (1.4%) | 11.0% | 4.5 | 4.2 | −0.24 (−0.7%) | −7.0% | 3.1 | 3.3 | 0.20 (0.6%) | 5.8% |
| Fling (down) | 7.2 | 9.0 | 1.80 (6.8%) | 55.3% | 10.5 | 12.3 | 1.83 (5.7%) | 53.9% | 14.6 | 16.5 | 1.96 (5.4%) | 55.5% |
| Cycle | 26.5 | 29.7 | 3.25 (12.3%) | 100% | 32.2 | 35.6 | 3.40 (10.5%) | 100% | 36.3 | 39.8 | 3.53 (9.7%) | 100% |
| L+/P+ × 102 | J = 0 | J = 0.5 | J = 1 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 40 mm | 16 mm | Enhancement | 40 mm | 16 mm | Enhancement | 40 mm | 16 mm | Enhancement | |
| Clap (down) | 8.53 | 8.72 | 0.19 (2.2%) | 7.81 | 7.82 | 0.01 (0.1%) | 7.32 | 7.38 | 0.07 (0.9%) |
| Fling (up) | 7.43 | 7.20 | −0.23 (−3.1%) | 6.91 | 6.82 | −0.10 (−1.4%) | 6.04 | 6.23 | 0.19 (3.2%) |
| Clap (up) | 8.23 | 8.42 | 0.19 (2.30%) | 8.33 | 8.52 | 0.19 (2.32%) | 8.02 | 8.46 | 0.43 (5.4%) |
| Fling (down) | 6.68 | 6.23 | −0.45 (−6.7%) | 7.62 | 7.45 | −0.17 (−2.2%) | 7.85 | 7.56 | −0.29 (−3.7%) |
| 7.71 | 7.55 | −0.16 (−2.1%) | 7.66 | 7.58 | −0.08 (−1.1%) | 7.44 | 7.40 | −0.04 (−0.6%) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Au, L.T.K.; Park, H.C.; Lee, S.T.; Hong, S.K. Clap-and-Fling Mechanism in Non-Zero Inflow of a Tailless Two-Winged Flapping-Wing Micro Air Vehicle. Aerospace 2022, 9, 108. https://doi.org/10.3390/aerospace9020108
Au LTK, Park HC, Lee ST, Hong SK. Clap-and-Fling Mechanism in Non-Zero Inflow of a Tailless Two-Winged Flapping-Wing Micro Air Vehicle. Aerospace. 2022; 9(2):108. https://doi.org/10.3390/aerospace9020108
Chicago/Turabian StyleAu, Loan Thi Kim, Hoon Cheol Park, Seok Tae Lee, and Sung Kyung Hong. 2022. "Clap-and-Fling Mechanism in Non-Zero Inflow of a Tailless Two-Winged Flapping-Wing Micro Air Vehicle" Aerospace 9, no. 2: 108. https://doi.org/10.3390/aerospace9020108