
Numerical and Experimental Research on Flight Control of a V-Tail Configuration for the Wind Tunnel Model of Aircraft
Abstract
:1. Introduction
2. Model Design and Manufacture
2.1. Aerodynamic Shape Design
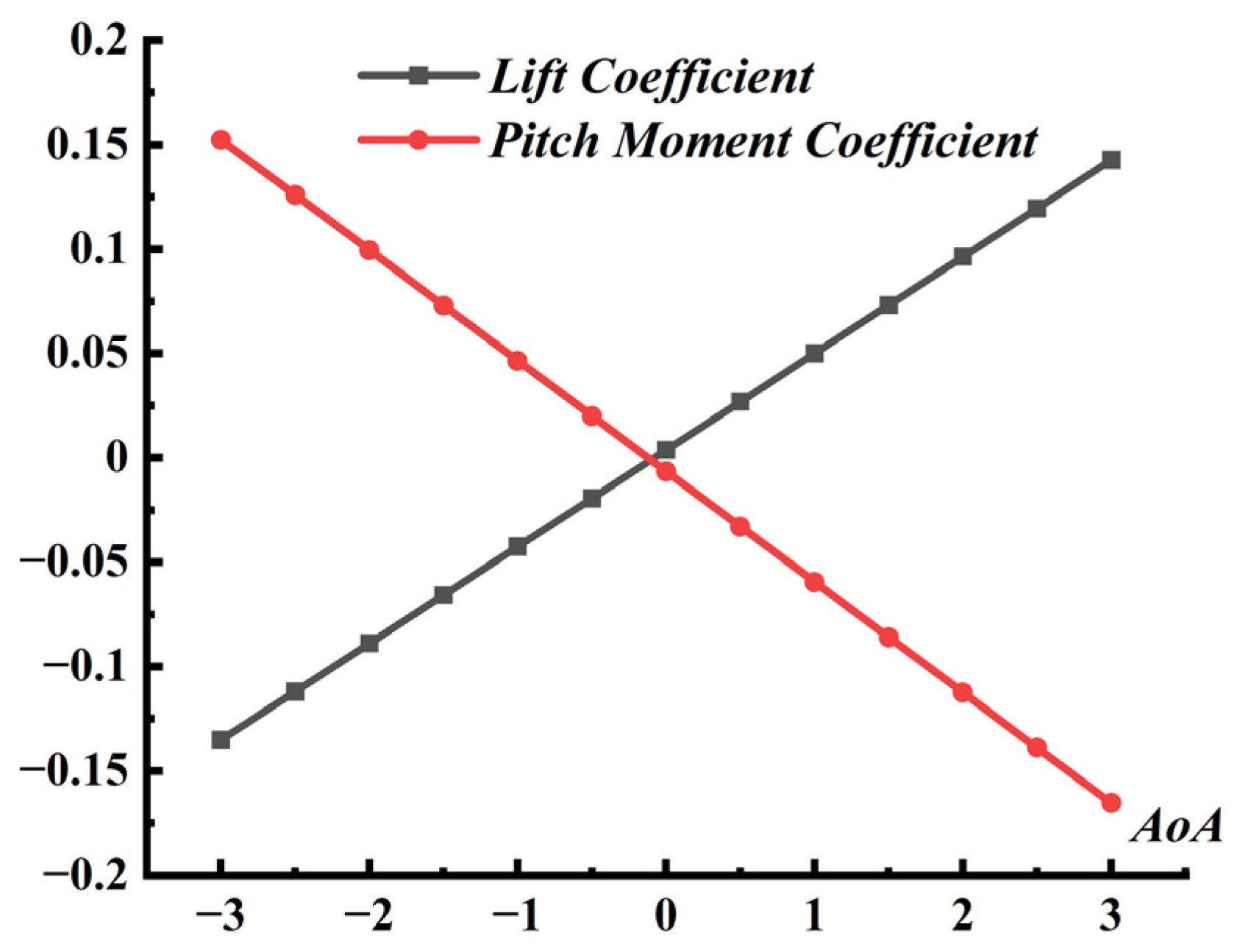
2.2. Aerodynamic Parameters
2.3. Aircraft Trimming
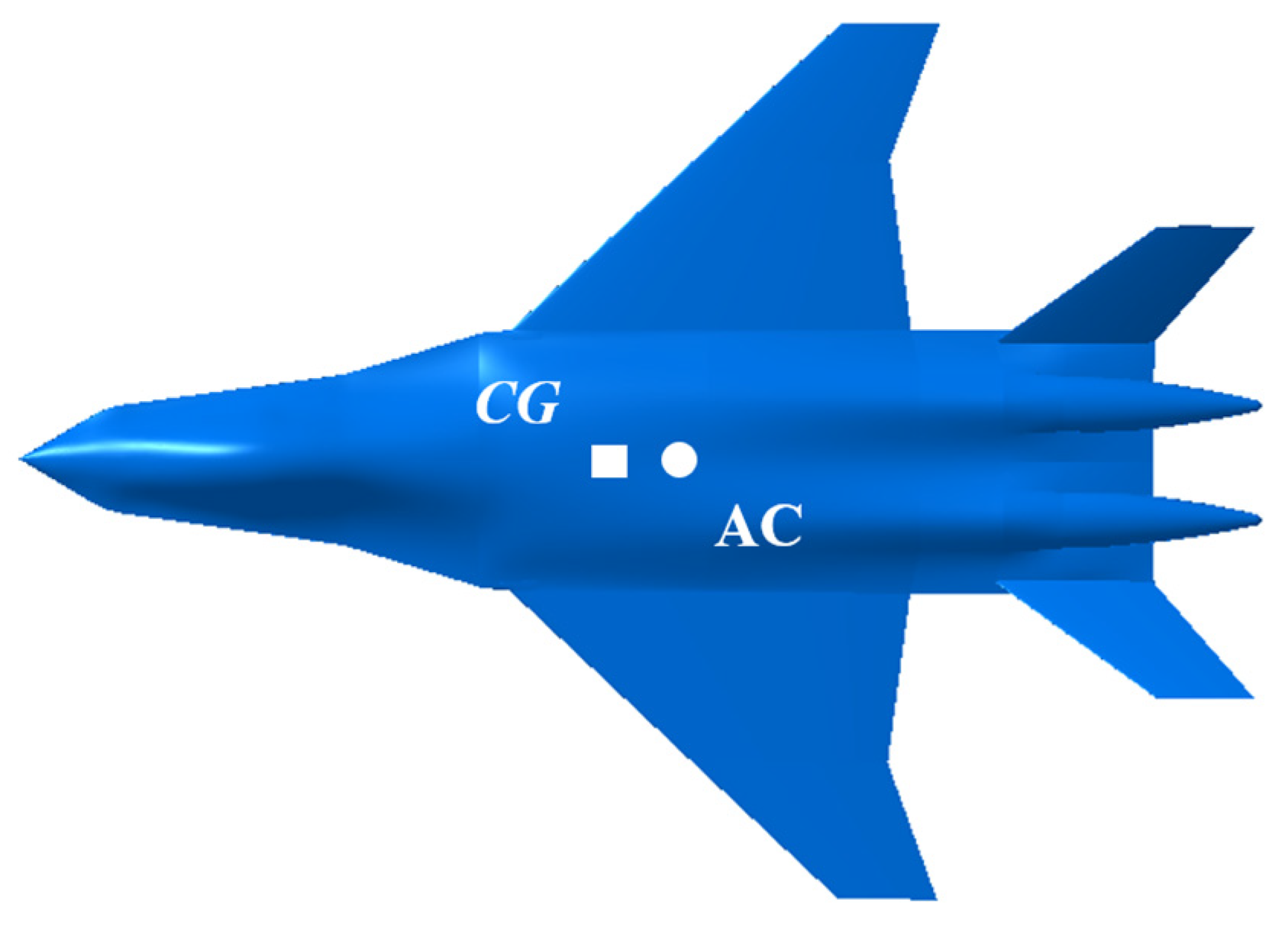
2.4. Aerodynamic Center
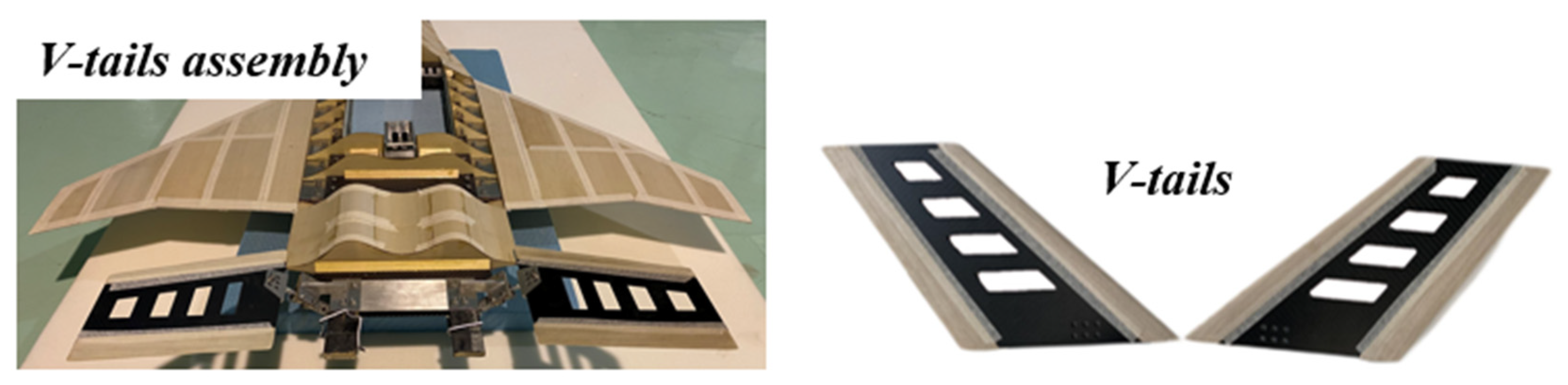
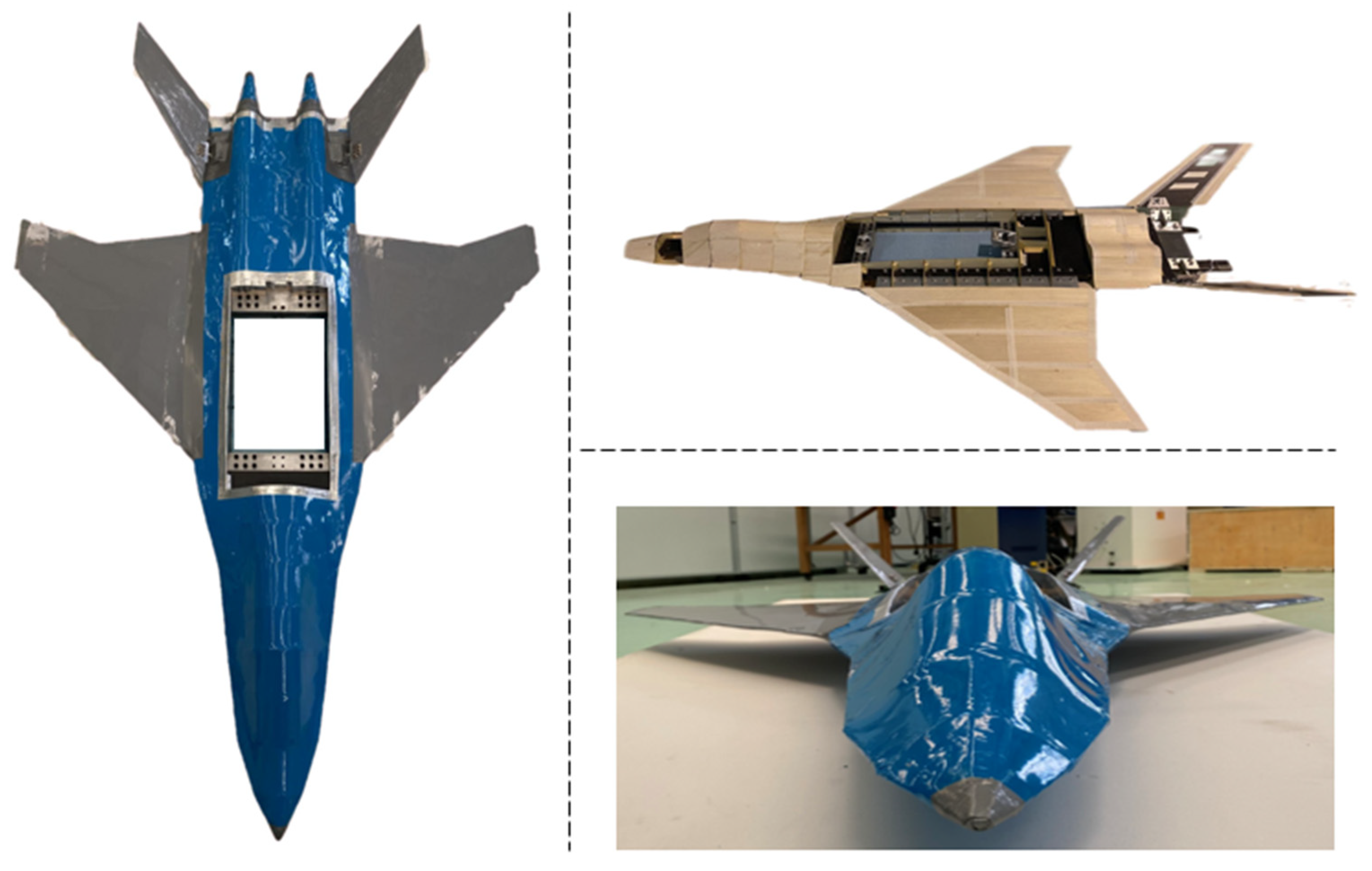
2.5. Detailed Structure Design of Full Model Aircraft
2.6. V-Tail Actuator Design
3. Flight Control Law
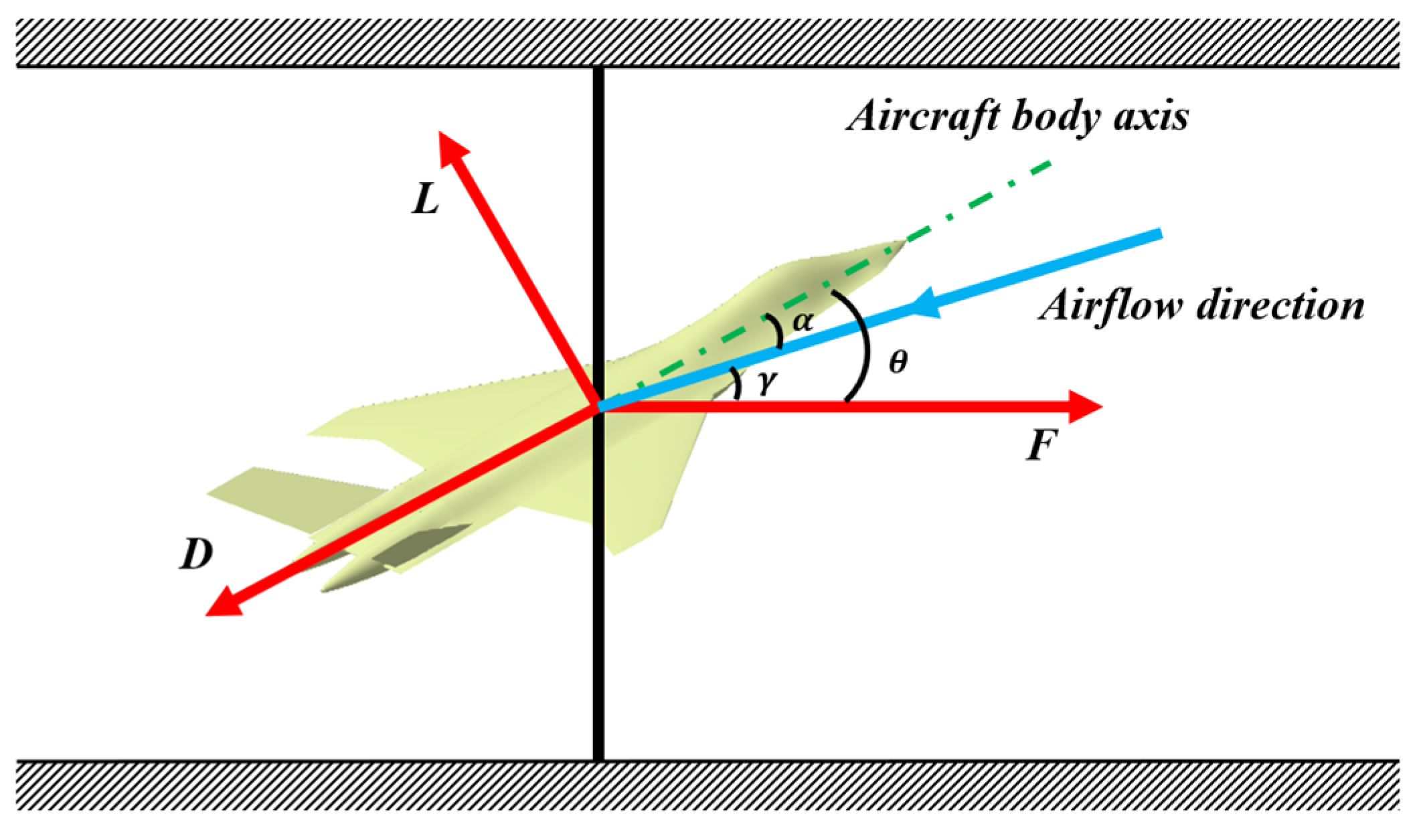
3.1. Dynamic Equation
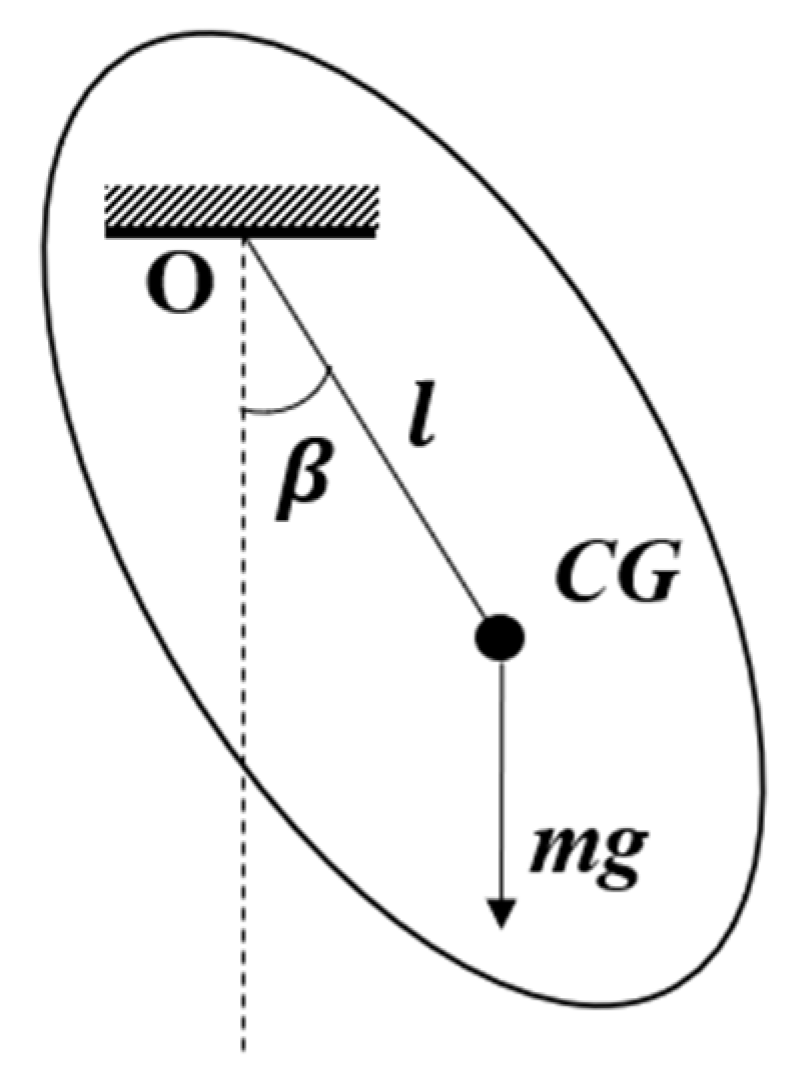
3.2. Measurement of Moment of Inertia
3.3. Simulation of the Flight Control Law
4. Wind Tunnel Test
4.1. Test Condition 1: Static Stability Verification
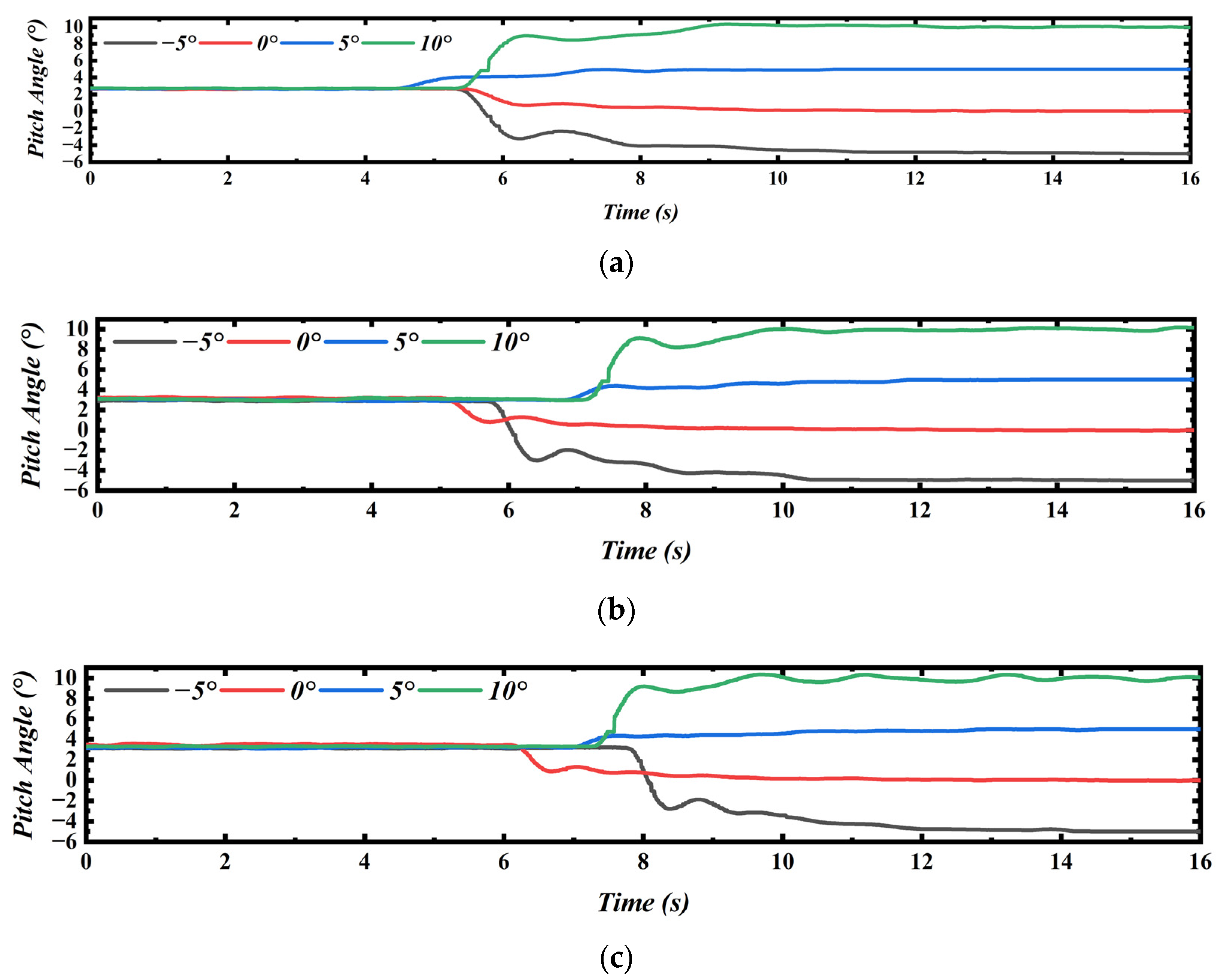
4.2. Test Condition 2: Attitude Control
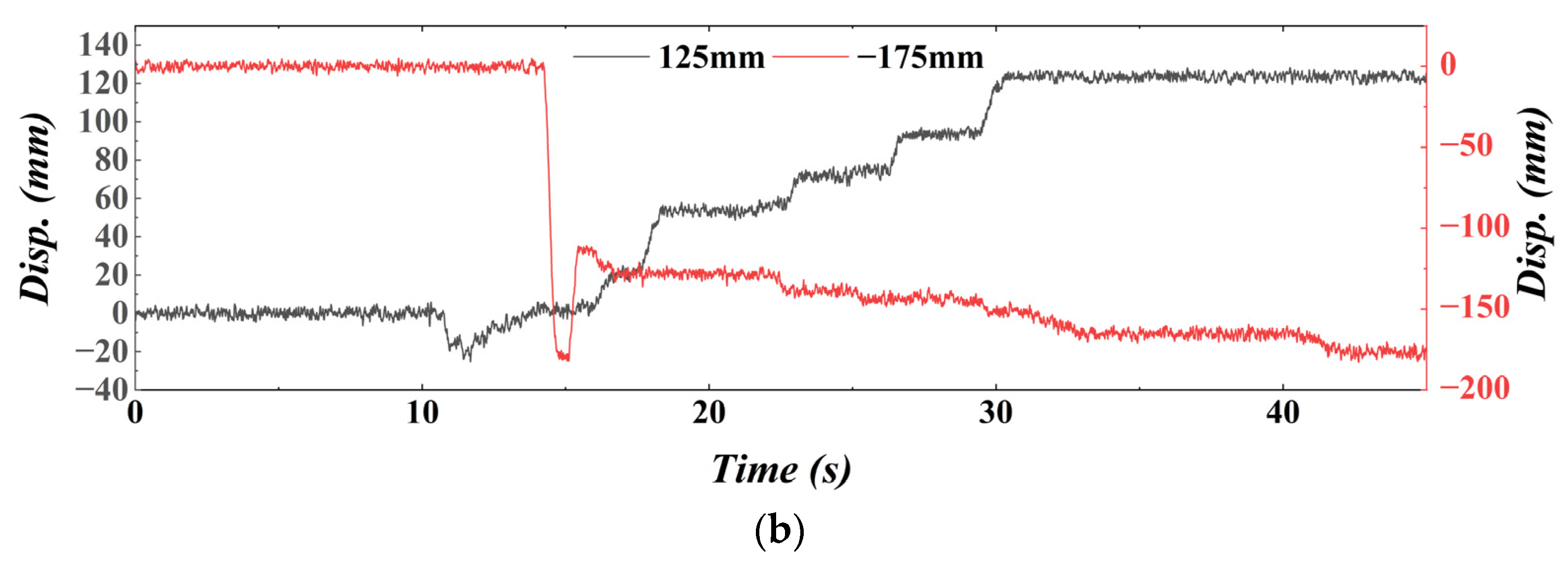
4.3. Test Condition 3: Height Control
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| M | Pitch moment relative to center of gravity |
| L | Lift force |
| AC | Aerodynamic center |
| XAC | Distance between center of gravity and aerodynamic center |
| M0 | Zero lift pitch moment (relative to aerodynamic center) |
| ρ | Air density |
| V | Air velocity |
| S | Reference area |
| Mean aerodynamic chord | |
| CM | Pitch moment coefficient relative to center of gravity |
| CL | Lift force coefficient |
| CM0 | Zero lift pitch moment coefficient (relative to aerodynamic center) |
| A1A2B1B2 | Slope and intercept of fitting curve |
| Angle of attack | |
| m | Mass |
| F | Horizontal reaction force |
| Climb angle | |
| D | Aerodynamic drag |
| Iy | Pitch moment of inertia |
| q | Pitch angular velocity |
| My | Moment about y-axis (pitch moment) |
| Pitch angle | |
| h | Height |
| Component of flight relative velocity in x direction | |
| MO | Moment relative to fix point O |
| CG | Center of gravity |
| l | Distance between CG and fix point O |
| Swing angle of the compound pendulum | |
| IO | Moment of inertia relative to point O |
| Swing angular acceleration | |
| Angular frequency | |
| ICG | Moment of inertia relative to CG |
| T | Swing period |
References
- Gong, W.; Xia, M.; Yue, L.; Zheng, J.; Zheng, S. Numerical Investigation on Flow Features and Static Stability Characteristics of the V-Tail Aircraft. Flight Dyn. 2021, 39, 19–24. [Google Scholar] [CrossRef]
- Sanchez-Carmona, A.; Cuerno-Rejado, C. Vee-Tail Conceptual Design Criteria for Commercial Transport Aeroplanes. Chin. J. Aeronaut. 2019, 32, 595–610. [Google Scholar] [CrossRef]
- Phillips, W.F.; Hansen, A.B.; Nelson, W.M. Effects of Tail Dihedral on Static Stability. J. Aircr. 2006, 43, 1829–1837. [Google Scholar] [CrossRef]
- Metz, P. Flight Test of the YF-23A Advanced Tactical Fighter. In Proceedings of the Aerospace Design Conference, Irvine, CA, USA, 3–6 February 1992; American Institute of Aeronautics and Astronautics: Irvine, CA, USA, 1992. [Google Scholar]
- García-Hernández, L.; Cuerno-Rejado, C.; Pérez-Cortés, M. Dynamics and Failure Models for a V-Tail Remotely Piloted Aircraft System. J. Guid. Control Dyn. 2018, 41, 505–513. [Google Scholar] [CrossRef]
- Abzug, M.J. V-Tail Stalling at Combined Angles of Attack and Sideslip. J. Aircr. 1999, 36, 729–731. [Google Scholar] [CrossRef]
- Qiao, F.; Shi, J.; Qu, X.; Lyu, Y. Adaptive Back-Stepping Neural Control for an Embedded and Tiltable V-Tail Morphing Aircraft. Int. J. Control Autom. Syst. 2022, 20, 678–690. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, N.; Liu, H.; Yue, T. Stability Characteristics and Airworthiness Requirements of Blended Wing Body Aircraft with Podded Engines. Chin. J. Aeronaut. 2022, 35, 77–86. [Google Scholar] [CrossRef]
- Leshikar, C.; Gosnell, S.; Gomez, E.; Moy, L.; Valasek, J. System Identification Flight Testing of Inverted V-Tail Small Unmanned Air System. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 15. [Google Scholar]
- Jin, W.; Yang, Z.; Meng, D.; Chen, Y.; Huang, H.; Wang, Y.; He, S.; Chen, Y. Strength Desigh and Test of Advanced Fighter All-Moving Twin V-Tail Buffet. Acta Aeronaut. Astronaut. Sin. 2020, 41, 15. [Google Scholar] [CrossRef]
- Zhu, W. Models for Wind Tunnel Tests Based on Additive Manufacturing Technology. Prog. Aerosp. Sci. 2019, 110, 100541. [Google Scholar] [CrossRef]
- Fujii, K. Progress and Future Prospects of CFD in Aerospace—Wind Tunnel and Beyond. Prog. Aerosp. Sci. 2005, 41, 455–470. [Google Scholar] [CrossRef]
- Damljanović, D.; Vuković, Đ.; Ocokoljić, G.; Ilić, B.; Rašuo, B. Wind Tunnel Testing of ONERA-M, AGARD-B and HB-2 Standard Models at Off-Design Conditions. Aerospace 2021, 8, 275. [Google Scholar] [CrossRef]
- Ocokoljić, G.; Rašuo, B.; Kozić, M. Supporting System Interference on Aerodynamic Characteristics of an Aircraft Model in a Low-Speed Wind Tunnel. Aerosp. Sci. Technol. 2017, 64, 133–146. [Google Scholar] [CrossRef]
- Ivanco, T.G. Unique Testing Capabilities of the NASA Langley Transonic Dynamics Tunnel, an Exercise in Aeroelastic Scaling. In Proceedings of the AIAA Ground Testing Conference, San Diego, CA, USA, 24–27 June 2013; p. 23. [Google Scholar]
- Yang, X.; Liu, N.; Guo, C.; Zhang, Y.; Sun, J.; Zhang, G.; Yu, X.; Yu, J.; Hou, L. A Survey of Aeroelastic Wind Tunnel Test Techonlogy of Flight Vehicles. Acta Aerodyn. Sin. 2018, 36, 995–1008. [Google Scholar] [CrossRef]
- Raju Kulkarni, A.; La Rocca, G.; Veldhuis, L.L.M.; Eitelberg, G. Sub-Scale Flight Test Model Design: Developments, Challenges and Opportunities. Prog. Aerosp. Sci. 2022, 130, 36. [Google Scholar] [CrossRef]
- Gebbink, R.; Wang, G.; Zhong, M. High-Speed Wind Tunnel Test of the CAE Aerodynamic Validation Model. Chin. J. Aeronaut. 2018, 31, 439–447. [Google Scholar] [CrossRef]
- Tang, D.; Dowell, E.H. Effects of a Free-to-Roll Fuselage on Wing Flutter: Theory and Experiment. AIAA J. 2014, 52, 2625–2632. [Google Scholar] [CrossRef]
- Scott, R.C.; Allen, T.; Castelluccio, M.; Sexton, B.; Claggett, S.; Dykman, J.R.; Funk, C.; Coulson, D.; Bartels, R.E. Aeroservoelastic Wind-Tunnel Test of the SUGAR Truss Braced Wing Wind-Tunnel Model. In Proceedings of the 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015; American Institute of Aeronautics and Astronautics: Kissimmee, FL, USA, 2015. [Google Scholar]
- Allen, T.; Sexton, B.; Scott, M.J. SUGAR Truss Braced Wing Full Scale Aeroelastic Analysis and Dynamically Scaled Wind Tunnel Model Development. In Proceedings of the 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015; American Institute of Aeronautics and Astronautics: Kissimmee, FL, USA, 2015. [Google Scholar]
- Tang, J.; Wu, F.; Pu, L.; Zeng, X.; Zhang, H.; Zhang, L. Development of a Two Degrees of Freedom Support System for Full Model Gust Tests. J. Exp. Fluid Mech. 2021, 35, 94–99. [Google Scholar] [CrossRef]
- Gu, X.; Duc Vo, H.; Mureithi, N.W.; Laurendeau, E. Plasma Gurney Flap Flight Control at Low Angle of Attack. J. Aircr. 2022, 1–18. [Google Scholar] [CrossRef]
- Courtland, W.J.D.; Perkins, D.; Hage, R.E. Airplane Performance, Stability and Control. J. R. Aeronaut. Soc. 1950, 54, 607–608. [Google Scholar]
- Cusati, V.; Corcione, S.; Ciliberti, D.; Nicolosi, F. Design Evolution and Wind Tunnel Tests of a Three-Lifting Surface Regional Transport Aircraft. Aerospace 2022, 9, 133. [Google Scholar] [CrossRef]
- Zhao, D.; Lu, Z.; Zhao, H.; Li, X.Y.; Wang, B.; Liu, P. A Review of Active Control Approaches in Stabilizing Combustion Systems in Aerospace Industry. Prog. Aerosp. Sci. 2018, 35–60. [Google Scholar] [CrossRef]
- Jasa, J.P.; Brelje, B.J.; Gray, J.S.; Mader, C.A.; Martins, J.R.R.A. Large-Scale Path-Dependent Optimization of Supersonic Aircraft. Aerospace 2020, 7, 152. [Google Scholar] [CrossRef]
- Junos, M.H.; Mohd Suhadis, N.; Zihad, M.M. Experimental Determination of the Moment of Inertias of USM E-UAV. AMM 2013, 465–466, 368–372. [Google Scholar] [CrossRef]
- Hong, S.-I.; Hong, S.-C. Moments of Inertia of Spheres without Integration in Arbitrary Dimensions. Eur. J. Phys. 2014, 35, 025003. [Google Scholar] [CrossRef]
- Katz, J.; Walters, R. Effects of Large Blockage in Wind-Tunnel Testing. J. Aircr. 1995, 32, 1149–1152. [Google Scholar] [CrossRef]
- Lei, P.; Yu, L.; Chen, D.; Lyu, B. Influence of Flight Control Law on Body Freedom Flutter Characteristics: Experimental Study. Acta Aeronaut. Astronaut. Sin. 2021, 42, 124378. [Google Scholar] [CrossRef]
- Lei, P.; Lyu, B.; Yu, L.; Chen, D. Influence of Inertial Parameters on Body Freedom Flutter of Flying Wings. Acta Aerodyn. Sin. 2021, 39, 18–24. [Google Scholar]
- He, S.; Guo, S.; Liu, Y.; Luo, W. Passive Gust Alleviation of a Flying-Wing Aircraft by Analysis and Wind-Tunnel Test of a Scaled Model in Dynamic Similarity. Aerosp. Sci. Technol. 2021, 113, 106689. [Google Scholar] [CrossRef]
- Shi, P.; Liu, J.; Gu, Y.; Yang, Z.; Marzocca, P. Full-Span Flying Wing Wind Tunnel Test: A Body Freedom Flutter Study. Fluids 2020, 5, 34. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Wu, Z.; Dai, Y.; Ma, C.; Yang, C. Wind Tunnel Test of Gust Alleviation Active Control for Flying Wing Configuration Aircraft. J. Beijing Univ. Aeronaut. Astronaut. 2017, 43, 184–192. [Google Scholar]
- Ricci, S.; De Gaspari, A.; Riccobene, L.; Fonte, F. Design and Wind Tunnel Test Validation of Gust Load Alleviation Systems. In Proceedings of the 58th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Grapevine, TX, USA, 9–13 January 2017; American Institute of Aeronautics and Astronautics: Grapevine, TX, USA, 2017. [Google Scholar]
- Scott, R.; Coulson, D.; Castelluccio, M.; Heeg, J. Aeroservoelastic Wind-Tunnel Tests of a Free-Flying, Joined-Wing SensorCraft Model for Gust Load Alleviation. In Proceedings of the 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Denver, CO, USA, 4–7 April 2011; American Institute of Aeronautics and Astronautics: Denver, CO, USA, 2011. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Scale ratio | 8% |
| Length | 1.82 m |
| Wingspan | 1.28 m |
| MAC | 0.32 m |
| Dihedral angle of V-tails | 40° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Qian, W.; Bai, Y.; Xu, X. Numerical and Experimental Research on Flight Control of a V-Tail Configuration for the Wind Tunnel Model of Aircraft. Aerospace 2022, 9, 792. https://doi.org/10.3390/aerospace9120792
Liu J, Qian W, Bai Y, Xu X. Numerical and Experimental Research on Flight Control of a V-Tail Configuration for the Wind Tunnel Model of Aircraft. Aerospace. 2022; 9(12):792. https://doi.org/10.3390/aerospace9120792
Chicago/Turabian StyleLiu, Jun, Wei Qian, Yuguang Bai, and Xiaole Xu. 2022. "Numerical and Experimental Research on Flight Control of a V-Tail Configuration for the Wind Tunnel Model of Aircraft" Aerospace 9, no. 12: 792. https://doi.org/10.3390/aerospace9120792