
Makespan-Minimizing Heterogeneous Task Allocation under Temporal Constraints

 ,
,
Abstract
:1. Introduction
2. Problem Statement
2.1. Heterogeneous Multi-UAV System and Temporal Constraints
2.2. Problem Formulation
3. Loitering Time and Penalty Value Calculation
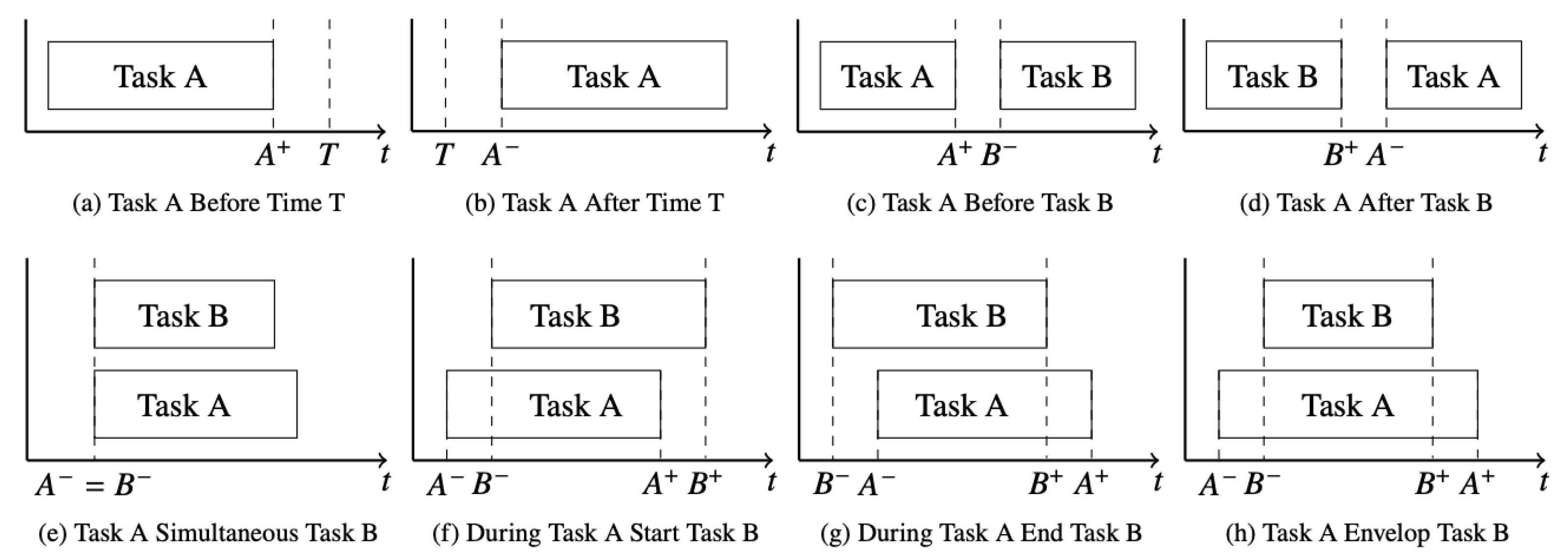
3.1. Temporal Constraints
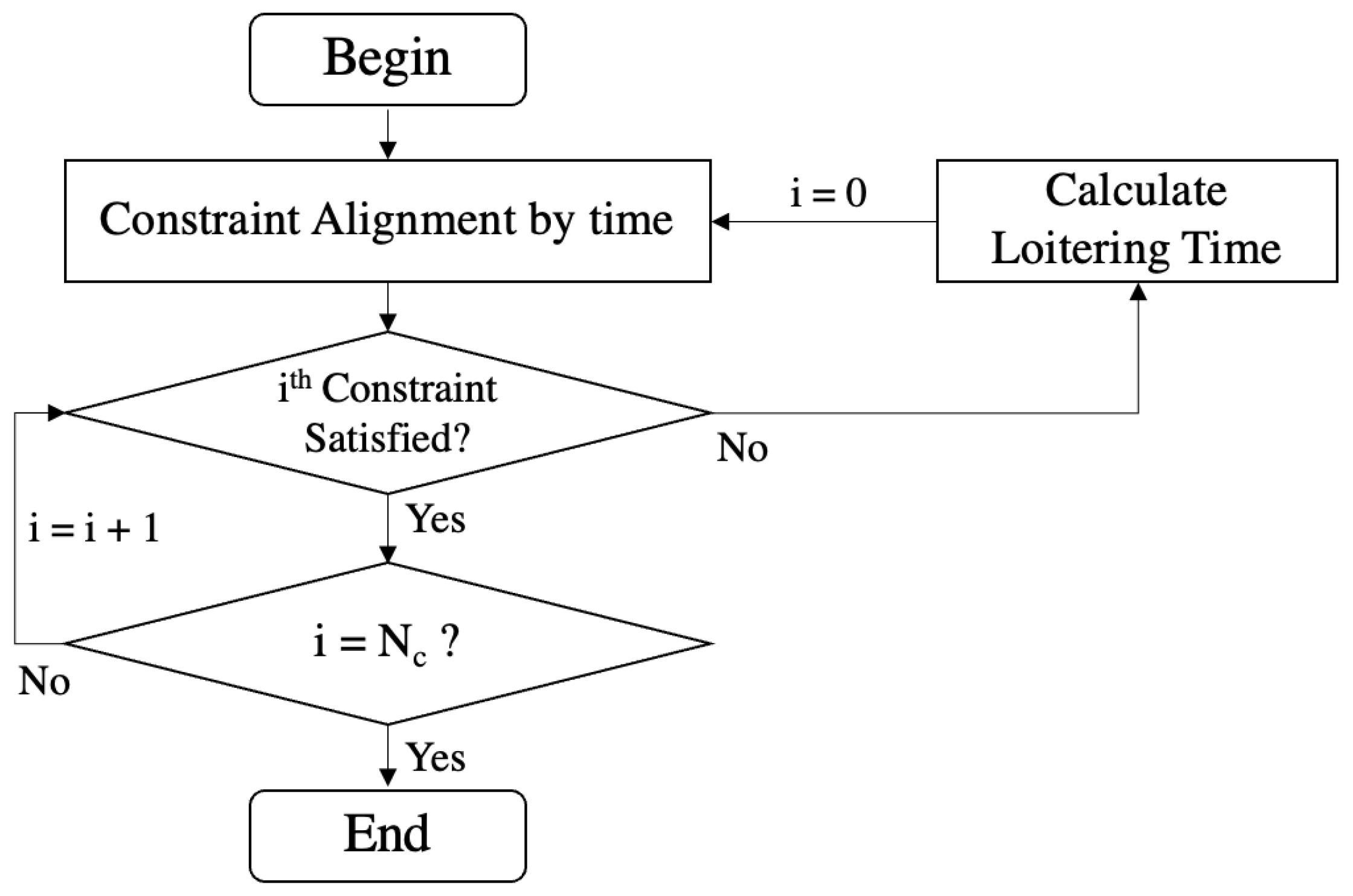
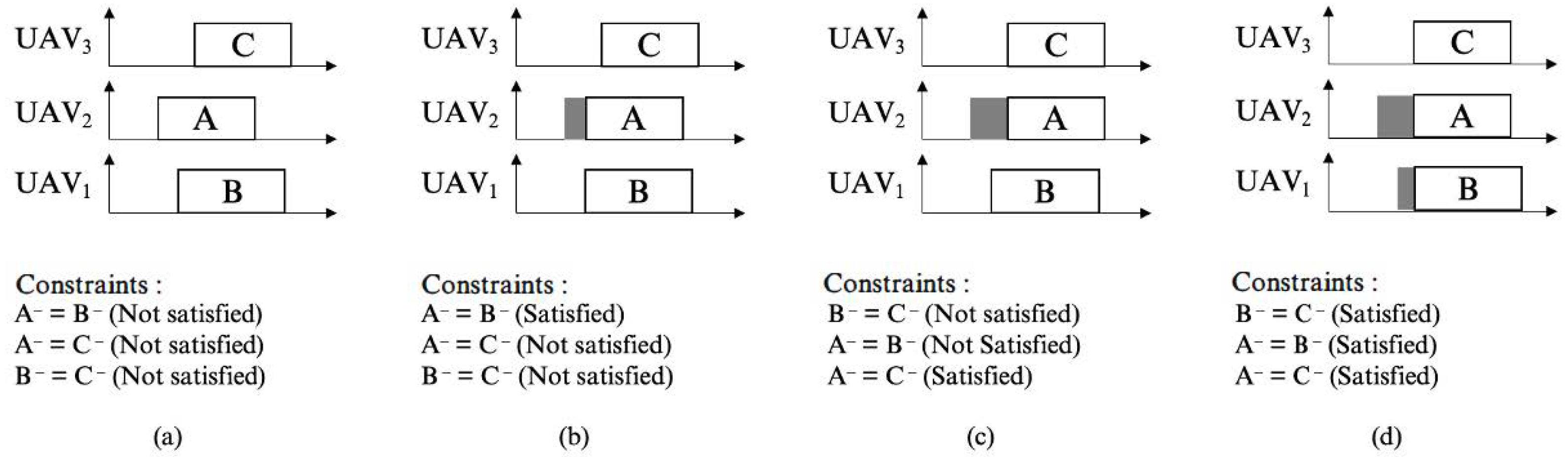
3.2. Loitering Time Calculation Method
3.3. Penalty Value Calculation
4. Modification of Existing Heuristic Algorithms for the Constrained Task Allocation
4.1. The Sequential Greedy Algorithm
| Algorithm 1 Sequential Greedy Algorithm |
|
4.2. The Genetic Algorithm
4.3. Simulated Annealing
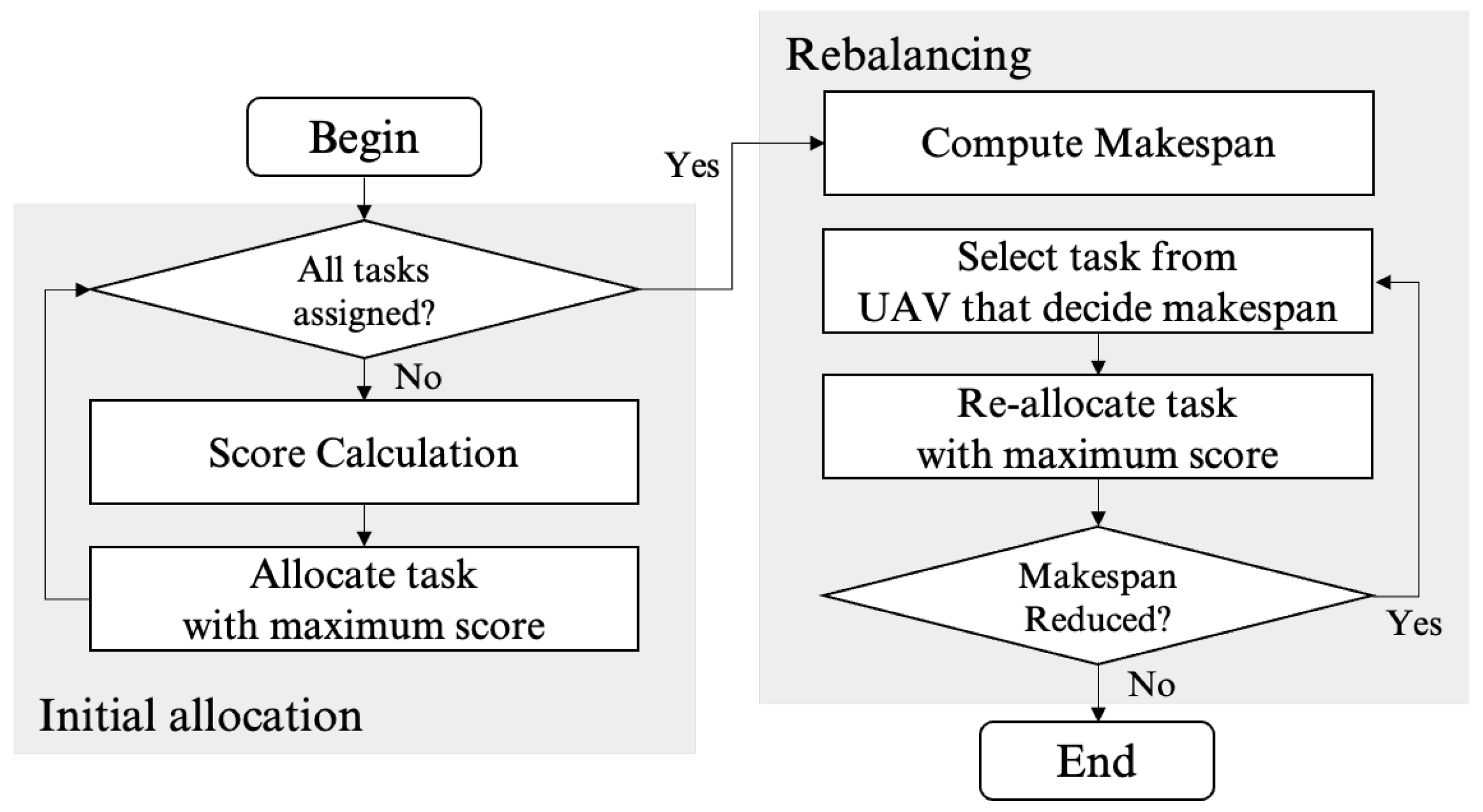
5. The Rebalancing Algorithm
5.1. Algorithm Structure
5.2. The Initial Allocation Step
| Algorithm 2 Initial Allocation |
|
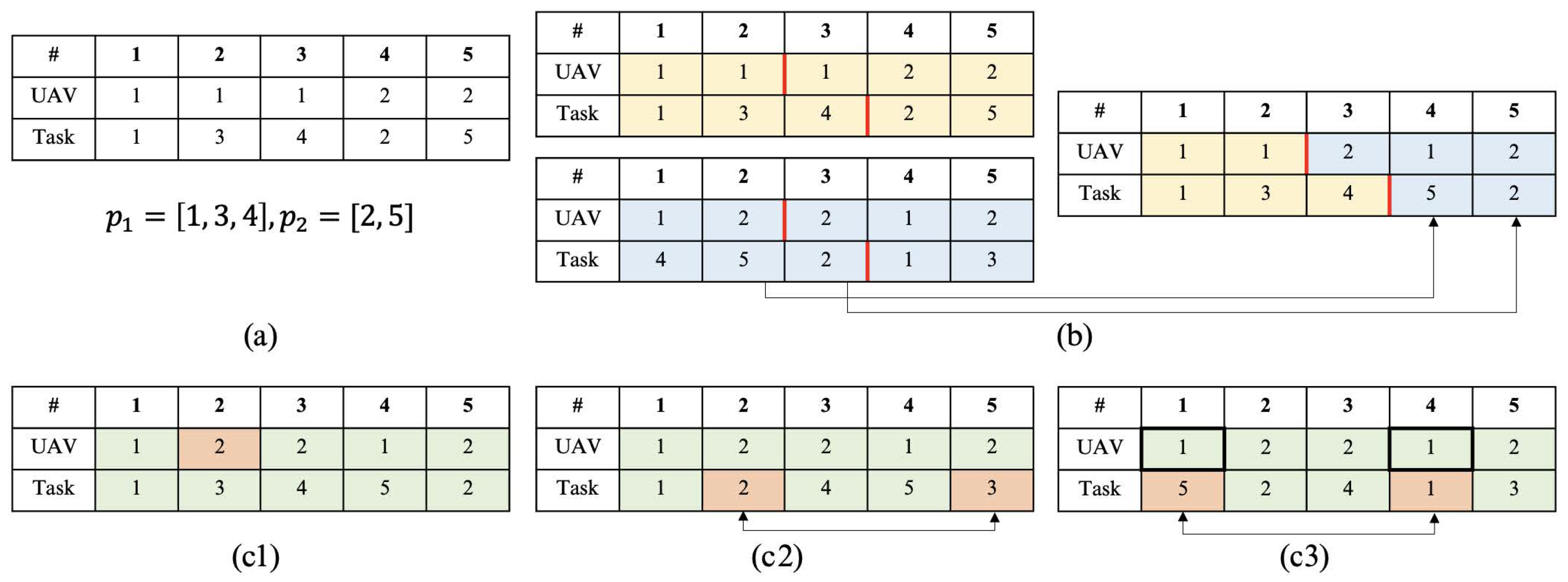
5.3. The Rebalancing Step
| Algorithm 3 Rebalancing |
|
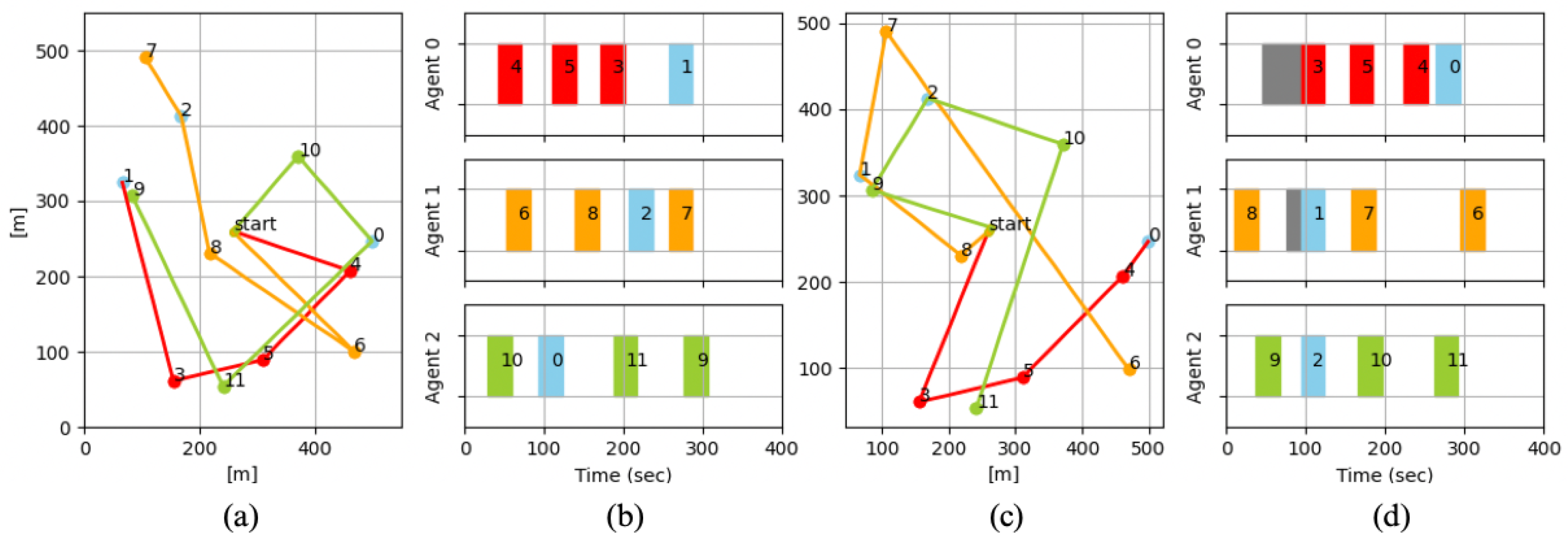
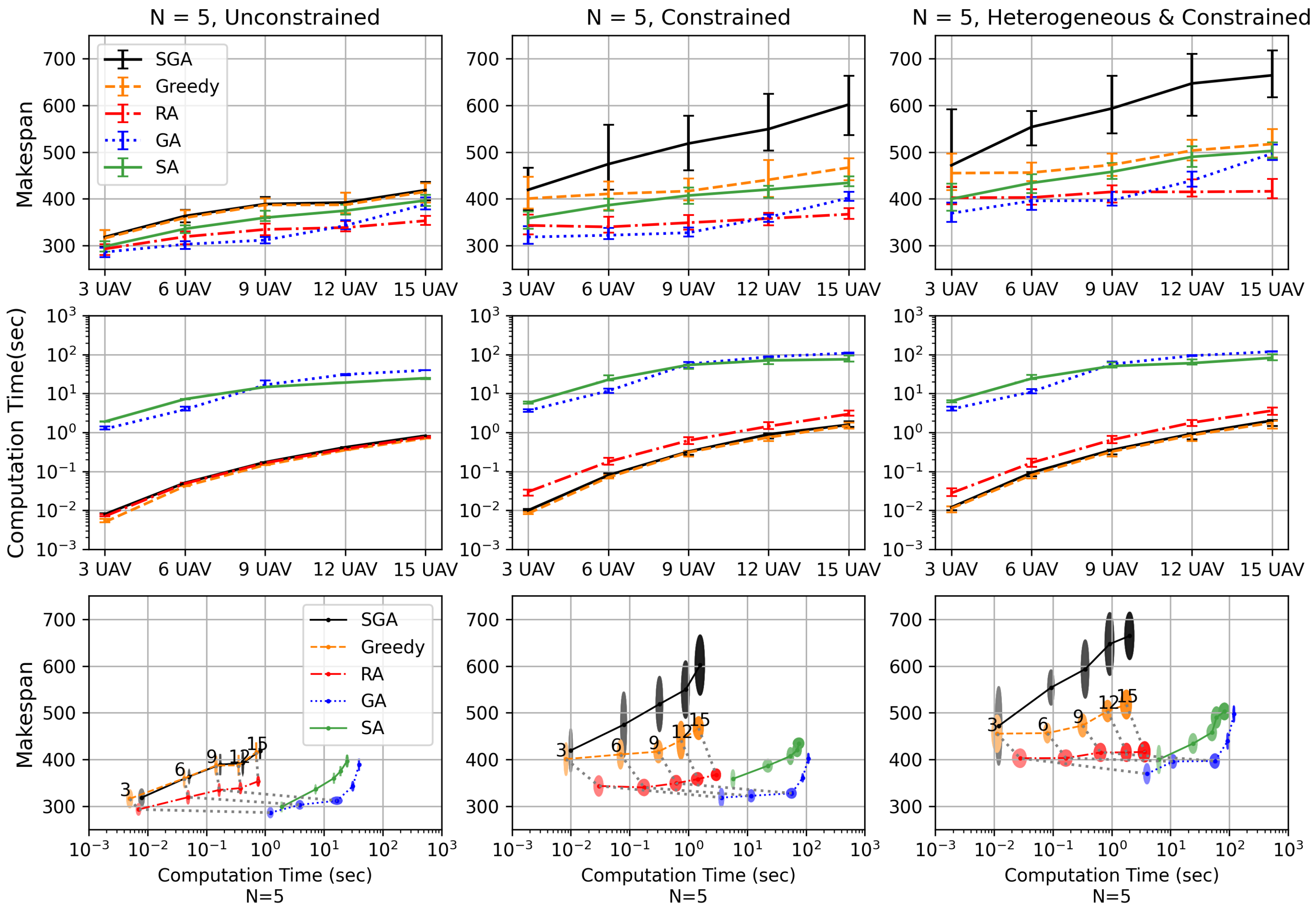
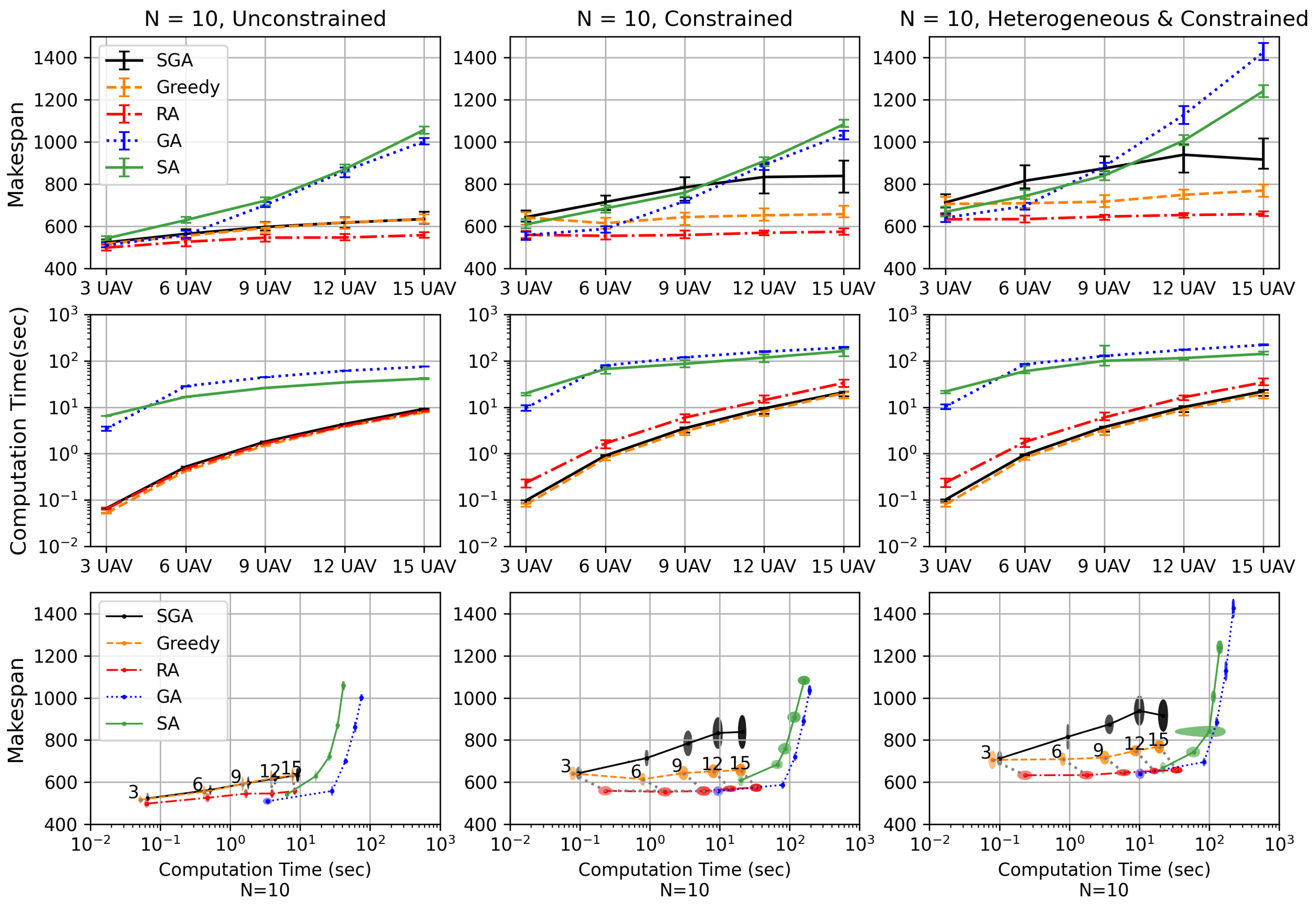
6. Numerical Simulation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Athanasiadi, N.I.; Mitkas, P.A. An agent-based intelligent environmental monitoring system. Manag. Environ. Qual. Int. J. 2004, 15, 238–249. [Google Scholar] [CrossRef]
- Erdelj, M.; Król, M.; Natalizio, E. Wireless sensor networks and multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Skobelev, P.; Budaev, D.; Gusev, N.; Voschuk, G. Designing Multi-agent Swarm of UAV for Precise Agriculture. In Highlights of Practical Applications of Agents, Multi-Agent Systems, and Complexity: The PAAMS Collection, Proceedings of the International Workshops of PAAMS 2018, Toledo, Spain, 20–22 June 2018; Springer: Cham, Switzerland, 2018; pp. 47–59. [Google Scholar] [CrossRef]
- Shehory, O.; Kraus, S. Methods for task allocation via agent coalition formation. Artif. Intell. 1998, 101, 165–200. [Google Scholar] [CrossRef]
- Notomista, G.; Mayya, S.; Hutchinson, S.; Egerstedt, M. An optimal task allocation strategy for heterogeneous multi-robot systems. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 2071–2076. [Google Scholar] [CrossRef]
- Johnson, L.; Ponda, S.; Choi, H.L.; How, J.P. Asynchronous decentralized task allocation for dynamic environments. Infotech Aerosp. 2011, 2011, 1441. [Google Scholar] [CrossRef]
- Whitten, A.K.; Choi, H.L.; Johnson, L.B.; How, J.P. Decentralized task allocation with coupled constraints in complex missions. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 1642–1649. [Google Scholar] [CrossRef]
- Choi, H.L.; Whitten, A.K.; How, J.P. Decentralized task allocation for heterogeneous teams with cooperation constraints. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 3057–3062. [Google Scholar] [CrossRef]
- Garcia, E.; Casbeer, D.W. Cooperative task allocation for unmanned vehicles with communication delays and conflict resolution. J. Aerosp. Inf. Syst. 2016, 13, 1–13. [Google Scholar] [CrossRef]
- Kim, K.S.; Kim, H.Y.; Choi, H.L. Minimizing communications in decentralized greedy task allocation. J. Aerosp. Inf. Syst. 2019, 16, 340–345. [Google Scholar] [CrossRef]
- Pendharkar, P.C. An ant colony optimization heuristic for constrained task allocation problem. J. Comput. Sci. 2015, 7, 37–47. [Google Scholar] [CrossRef]
- Chen, G.; Cruz, J.B. Genetic algorithm for task allocation in UAV cooperative control. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Austin, TX, USA, 11–14 August 2003; p. 5582. [Google Scholar] [CrossRef]
- Liu, C.; Kroll, A. A centralized multi-robot task allocation for industrial plant inspection by using a* and genetic algorithms. In Artificial Intelligence and Soft Computing, Proceedings of the 11th International Conference, ICAISC 2012, Zakopane, Poland, 29 April–3 May 2012; Proceedings, Part II 11; Springer: Berlin/Heidelberg, Germany, 2012; pp. 466–474. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, L.; Long, T.; Wen, Y. Multi-UAV reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding. Chin. J. Aeronaut. 2018, 31, 339–350. [Google Scholar] [CrossRef]
- Page, J.A.; Keane, T.M.; Naughton, T.J. Multi-heuristic dynamic task allocation using genetic algorithms in a heterogeneous distributed system. J. Parallel Distrib. Comput. 2010, 70, 758–766. [Google Scholar] [CrossRef] [PubMed]
- Page, J.A.; Keane, T.M.; Naughton, T.J. Genetic algorithm-based task allocation in multiple modes of human–robot collaboration systems with two cobots. Int. J. Adv. Manuf. Technol. 2022, 119, 7291–7309. [Google Scholar] [CrossRef]
- Chen, J.; Yang, Y.; Wu, Y. Multi-robot task allocation based on robotic utility value and genetic algorithm. In Proceedings of the 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems, Shanghai, China, 20–22 November 2009; Volume 2, pp. 256–260. [Google Scholar] [CrossRef]
- Rauniyar, A.; Muhuri, P.K. Multi-robot coalition formation problem: Task allocation with adaptive immigrants based genetic algorithms. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 137–142. [Google Scholar] [CrossRef]
- Sujit, P.; George, J.; Beard, R. Multiple UAV task allocation using particle swarm optimization. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 6837. [Google Scholar] [CrossRef]
- Attiya, G.; Hamam, Y. Task allocation for maximizing reliability of distributed systems: A simulated annealing approach. J. Parallel Distrib. Comput. 2006, 66, 1259–1266. [Google Scholar] [CrossRef]
- Mosteo, A.R.; Montano, L. Simulated annealing for multi-robot hierarchical task allocation with flexible constraints and objective functions. In Proceedings of the Workshop on Network Robot Systems: Toward Intelligent Robotic Systems Integrated with Environments, Beijing, China, 9–15 October 2006. [Google Scholar]
- Beck, J.E.; Siewiorek, D.P. Simulated annealing applied to multicomputer task allocation and processor specification. In Proceedings of the SPDP’96: 8th IEEE Symposium on Parallel and Distributed Processing, New Orleans, LA, USA, 23–26 October 1996; pp. 232–239. [Google Scholar] [CrossRef]
- Kashani, M.H.; Jahanshahi, M. Using simulated annealing for task scheduling in distributed systems. In Proceedings of the 2009 International Conference on Computational Intelligence, Modelling and Simulation, Brno, Czech Republic, 7–9 September 2009; pp. 265–269. [Google Scholar] [CrossRef]
- DiNatale, M.; Stankovic, J.A. Applicability of simulated annealing methods to real-time scheduling and jitter control. In Proceedings of the 16th IEEE Real-Time Systems Symposium, Pisa, Italy, 5–7 December 1995; pp. 190–199. [Google Scholar] [CrossRef]
- Godoy, J.; Gini, M. Task allocation for spatially and temporally distributed tasks. In Intelligent Autonomous Systems, Proceedings of the 12th International Conference IAS-12, Jeju Island, Republic of Korea, 26–29 June 2012; Springer: Berlin/Heidelberg, Germany, 2013; pp. 603–612. [Google Scholar] [CrossRef]
- Amador, S.; Okamoto, S.; Zivan, R. Dynamic multi-agent task allocation with spatial and temporal constraints. In Proceedings of the AAAI Conference on Artificial Intelligence, Quebec City, QC, Canada, 27–31 July 2014; Volume 28, pp. 1384–1390. [Google Scholar] [CrossRef]
- Mitiche, H.; Boughaci, D.; Gini, M. Iterated local search for time-extended multi-robot task allocation with spatio-temporal and capacity constraints. J. Intell. Syst. 2019, 28, 347–360. [Google Scholar] [CrossRef]
- Zhao, X.; Zong, Q.; Tian, B.; Zhang, B.; You, M. Fast task allocation for heterogeneous unmanned aerial vehicles through reinforcement learning. Aerosp. Sci. Technol. 2019, 92, 588–594. [Google Scholar] [CrossRef]
- Schwalb, E.; Vila, L. Temporal constraints: A survey. Constraints 1998, 3, 129–149. [Google Scholar] [CrossRef]
- Jeong, B.M.; Jang, D.S.; Hwang, N.E.; Kim, J.W.; Choi, H.L. Genetic algorithm based multi-UAV mission planning method considering temporal constraints. J. Aerosp. Syst. Eng. 2023. [Google Scholar]
- Choi, H.L.; Brunet, L.; How, J.P. Consensus-based decentralized auctions for robust task allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | Camera | Thermal | LIDAR | |
|---|---|---|---|---|
| Task | ||||
| Search | 0 | 1 | 0 | |
| Fixed surv. | 1 | 1 | 0 | |
| Moving surv. | 1 | 1 | 0 | |
| Mapping | 0 | 0 | 1 | |
| # | Temporal Constraint | Algebraic Representation |
|---|---|---|
| 1 | Task A Before Time T | |
| 2 | Task A After Time T | |
| 3 | Task A Before Task B | |
| 4 | Task A After Task B | |
| 5 | Task A Simultaneous Task B | |
| 6 | During Task A Start Task B | |
| 7 | During Task A End Task B | |
| 8 | Task A Envelop Task B |
| Constraint 1 | Constraint 2 | Action |
|---|---|---|
| Remove “” (if ) Remove “” (if ) | ||
| Infeasible (if ) No action (if ) | ||
| Add “” | ||
| No action | ||
| Add “” | ||
| Remove “” (if ) Remove “” (if ) | ||
| No action | ||
| Add “” | ||
| Add “” | ||
| Add “” | ||
| No action | ||
| Infeasible | ||
| Add “” | ||
| Add “” |
| Constraint | |
|---|---|
| big number (if violated) 0 (if not) | |
| max() | |
| max() | |
| big number (if violated) 0 (if not) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, B.-M.; Oh, Y.-S.; Jang, D.-S.; Hwang, N.-E.; Kim, J.-W.; Choi, H.-L. Makespan-Minimizing Heterogeneous Task Allocation under Temporal Constraints. Aerospace 2023, 10, 1032. https://doi.org/10.3390/aerospace10121032
Jeong B-M, Oh Y-S, Jang D-S, Hwang N-E, Kim J-W, Choi H-L. Makespan-Minimizing Heterogeneous Task Allocation under Temporal Constraints. Aerospace. 2023; 10(12):1032. https://doi.org/10.3390/aerospace10121032
Chicago/Turabian StyleJeong, Byeong-Min, Yun-Seo Oh, Dae-Sung Jang, Nam-Eung Hwang, Joon-Won Kim, and Han-Lim Choi. 2023. "Makespan-Minimizing Heterogeneous Task Allocation under Temporal Constraints" Aerospace 10, no. 12: 1032. https://doi.org/10.3390/aerospace10121032