
Movement Pattern Analysis Based on Sequence Signatures

 ,
, 
Abstract
:1. Introduction
2. Related Works
2.1. Relationships among MPOs
2.2. Visualization of MPOs
2.3. Clustering of Movements
3. Methodology
3.1. Step 1: Converting Raw Trajectory Data into Qualitative Relationships
| Assume: MPOs k and l, and time stamp t |
| k | t denotes the position of k at t |
| l | t denotes the position of l at t |
| d(u,v) denotes the Euclidean distance between two positions u and v |
| t1 < t2 denotes that t1 is temporally before t2 |
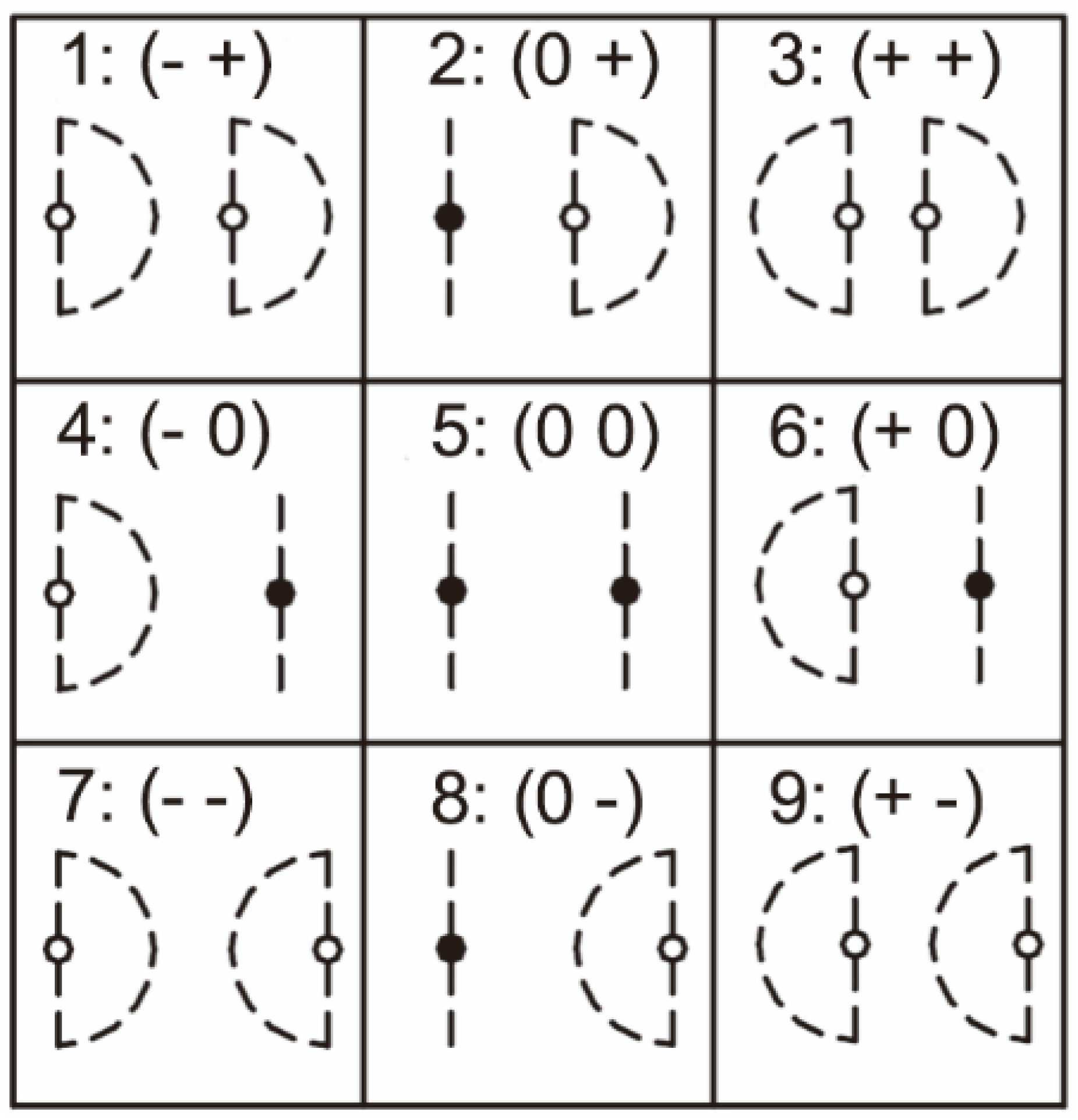
- A.
- Movement of k with respect to l at t (distance constraint):
- − : k is moving toward l:
- +: k is moving away from l:
- 0: k is stable with respect to l (all other cases)
- B.
- Movement of l with respect to k at t (distance constraint) can be described as in A with k and l interchanged, and hence:−: l is moving toward k+: l is moving away from k
- 0: l is stable with respect to k (all other cases)

- : k is stable with respect to l, and l is moving away from k
- : k is stable with respect to l, and l is moving toward k
- : k is moving away from l, and l is stable with respect to k
- : k is moving toward l, and l is stable with respect to k
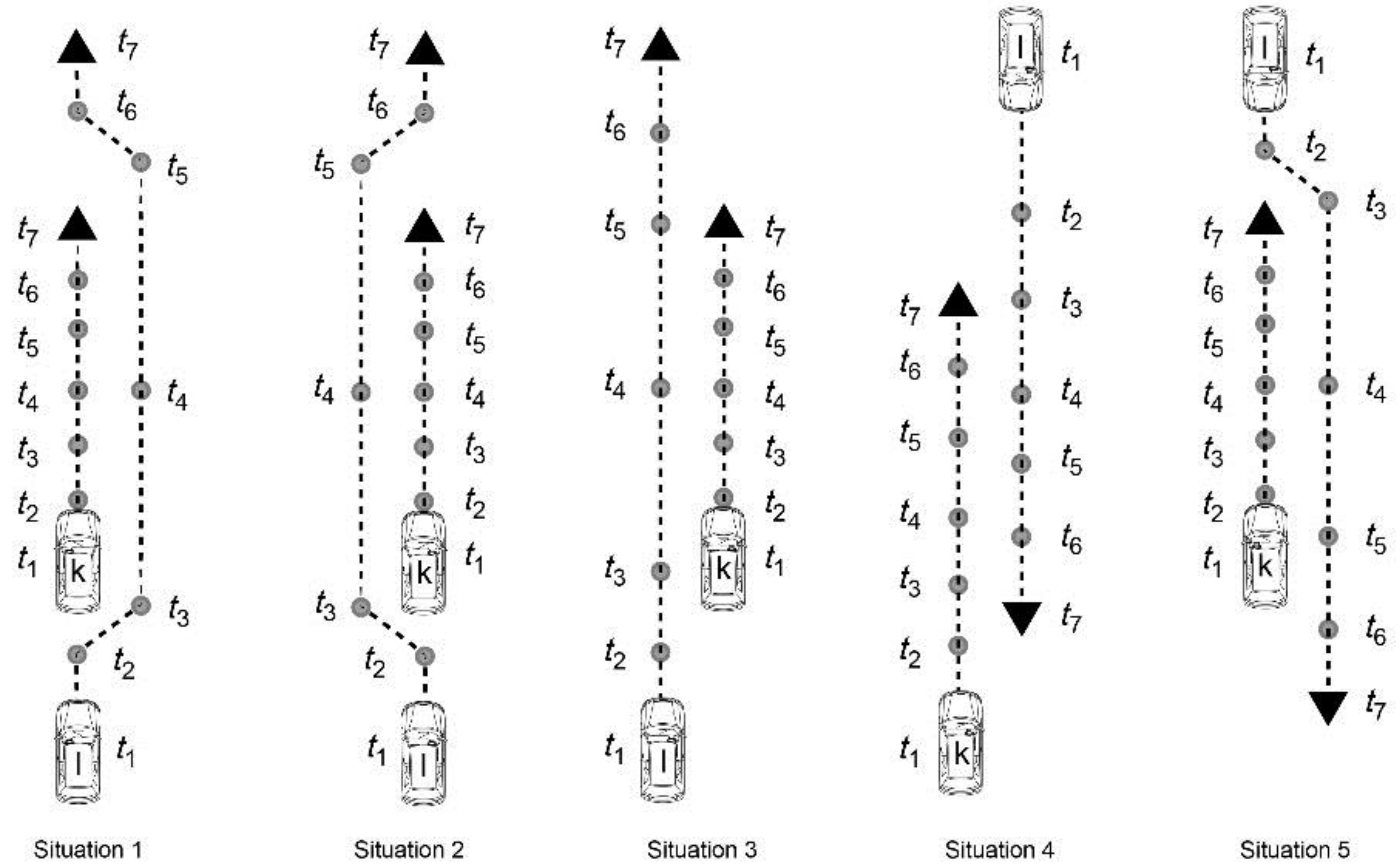
- State 1.
- car k and car l are both driving in the same traffic lane, and k is driving behind l:
- State 2.
- car k is heading out to the second lane:
- State 3.
- car k is driving in the second lane and is driving behind l, which is driving in the first lane: (see Figure 2).
- State 4.
- car k is driving in the second lane and is driving in front of car l, which is driving in the first lane:
- State 5.
- car k is heading back to the first lane:
- State 6.
- car k and car l are both driving in the first lane, and l is driving behind k:

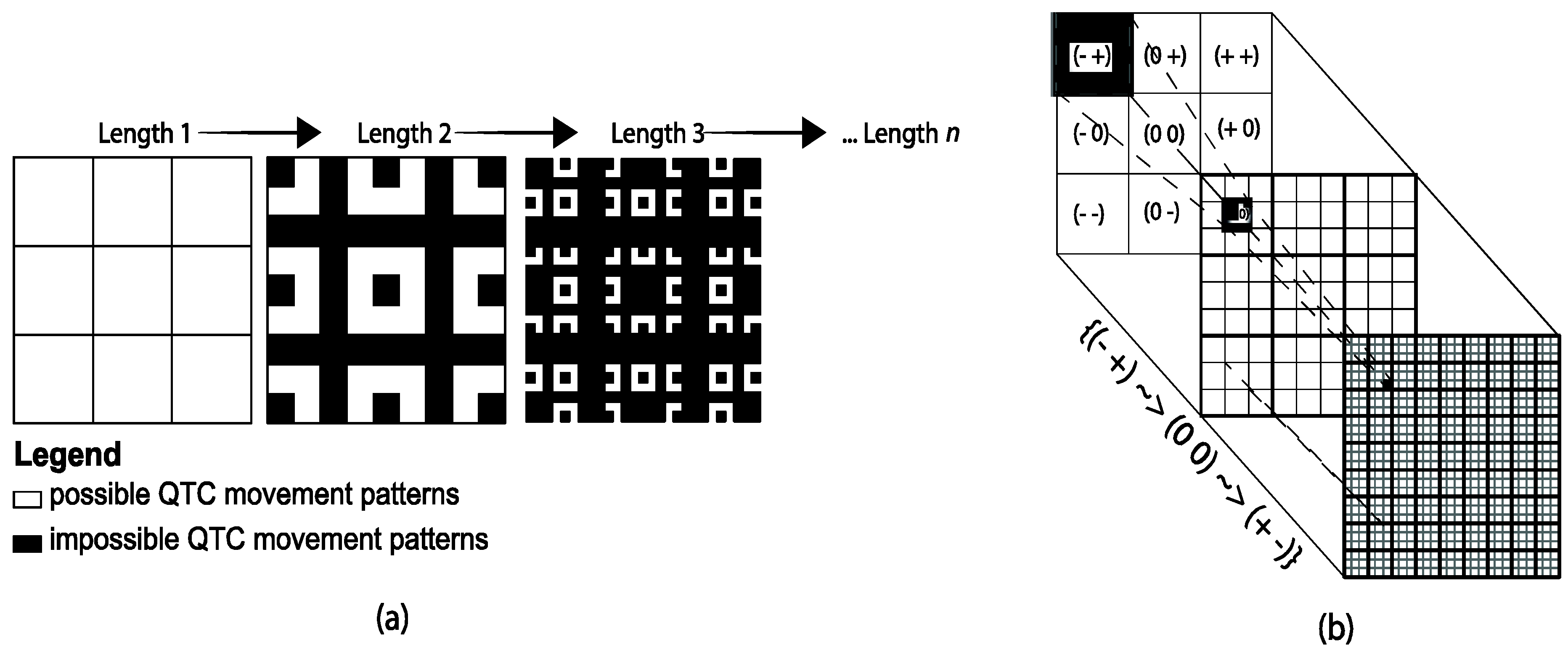
3.2. Step 2: Summarizing QTCB Movement Patterns in a Sequence Signature


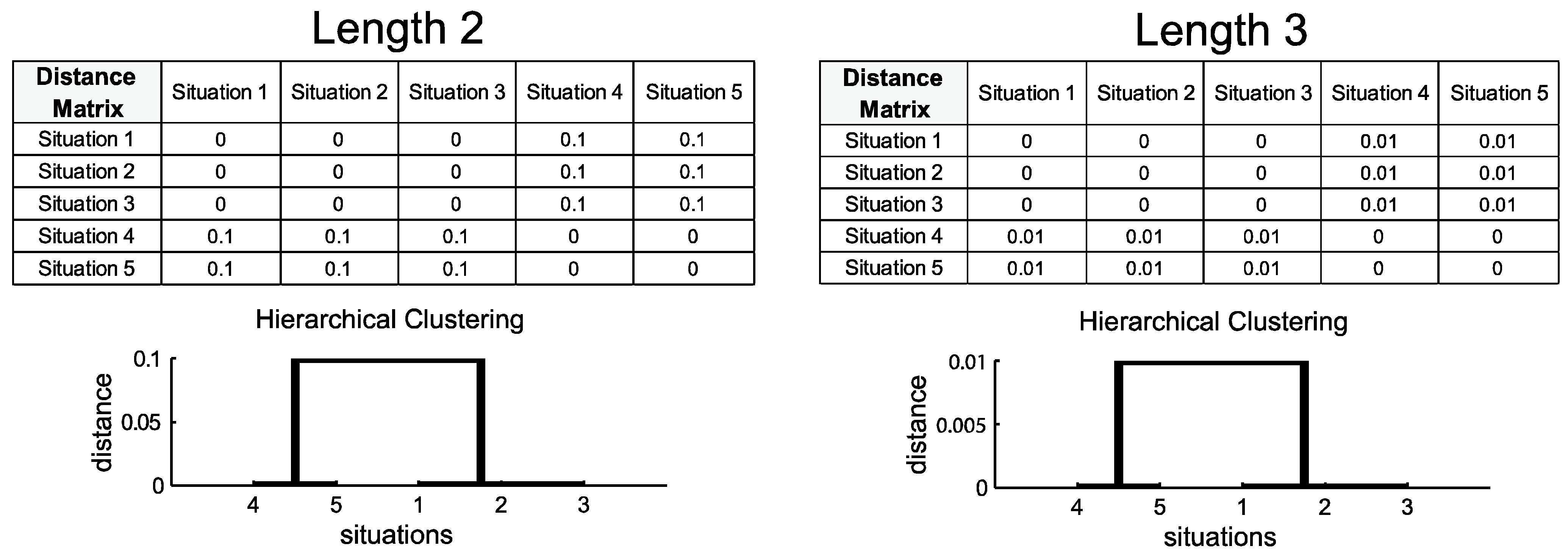
3.3. Step 3: Clustering Trajectory Pairs Based on Their Relative Movement Patterns.


4. Illustration
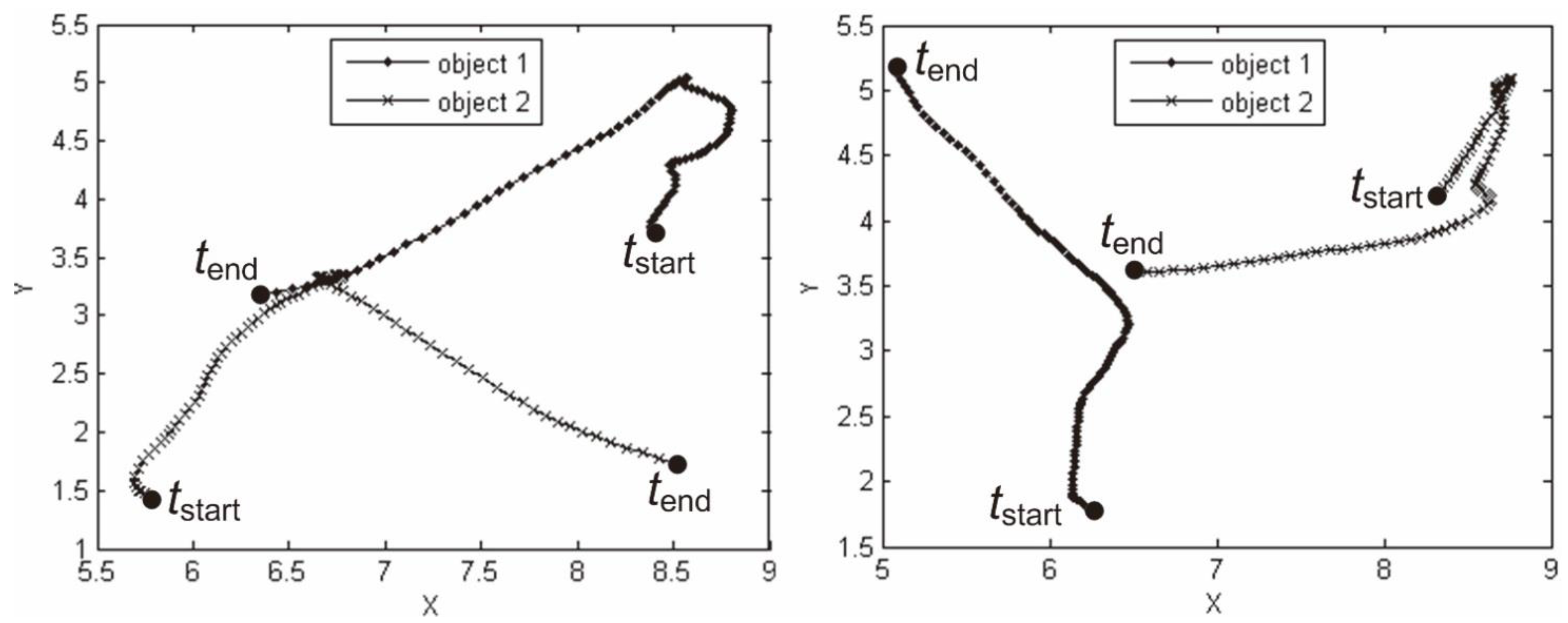
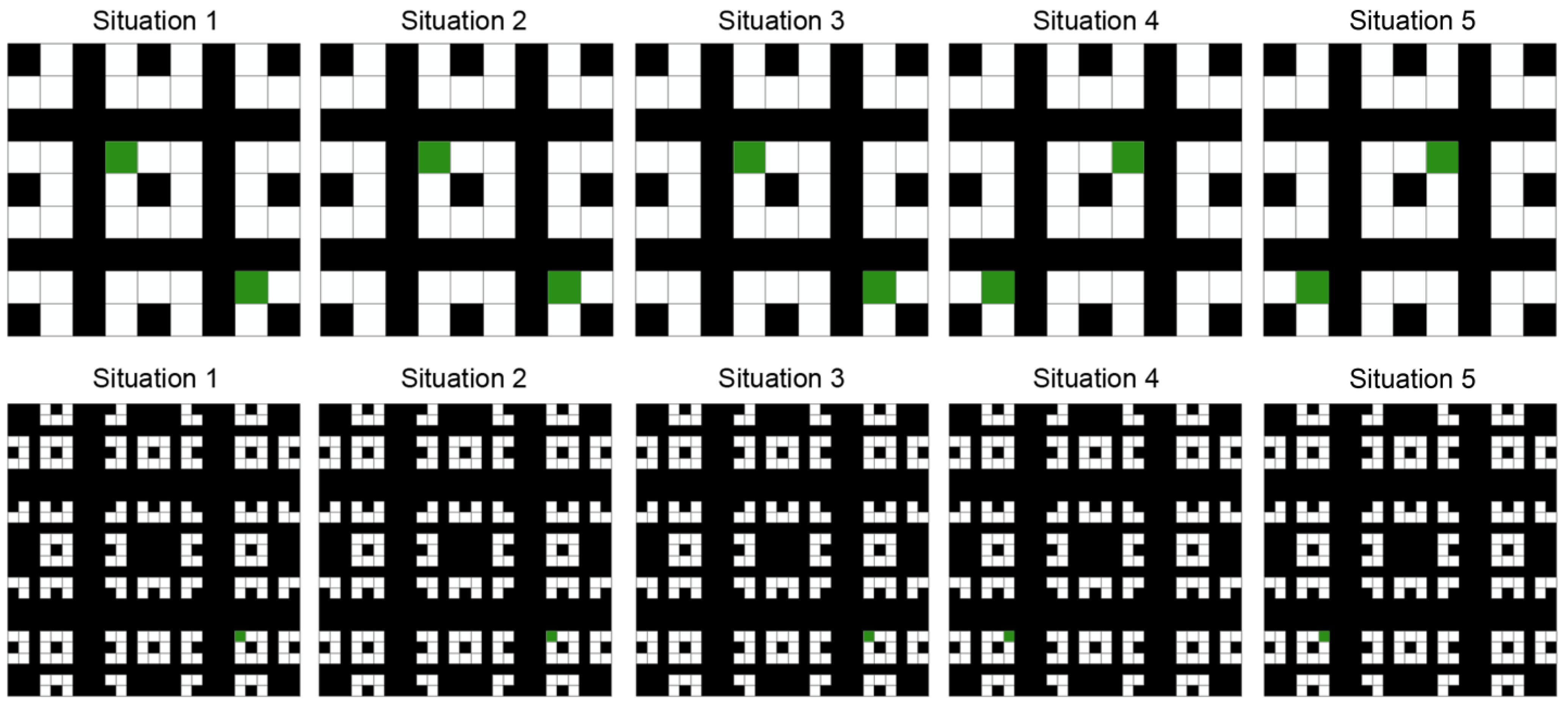
4.1. Example 1: Overtake Event on a Highway




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Situation 1 | Situation 2 | Situation 3 | Situation 4 | Situation 5 |
|---|---|---|---|---|
| { (+ -) ==> (00)} | { (+ -) ==> (00)} | { (+ -) ==> (00)} | { (- -) ==> (00)} | { (- -) ==> (00)} |
| {(0 0) ==> (- +)} | {(0 0) ==> (- +)} | {(0 0) ==> (- +)} | { (0 0) ==> (+ +)} | { (0 0) ==> (+ +)} |
| {(+ -) ==> (0 0) ==> (- +)} | {(+ -) ==> (0 0) ==> (- +)} | {(+ -) ==> (0 0) ==> (- +)} | {(- -) ==> (0 0) ==> (+ +)} | {(- -) ==> (0 0) ==> (+ +)} |
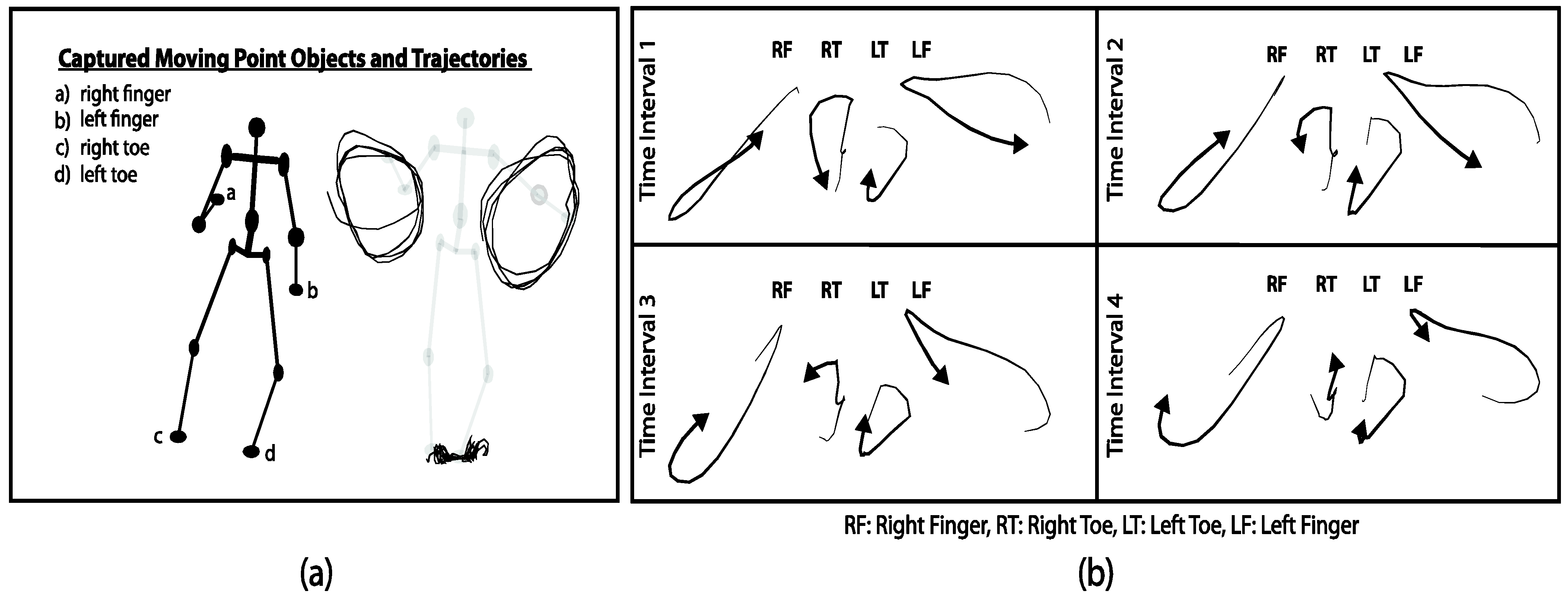
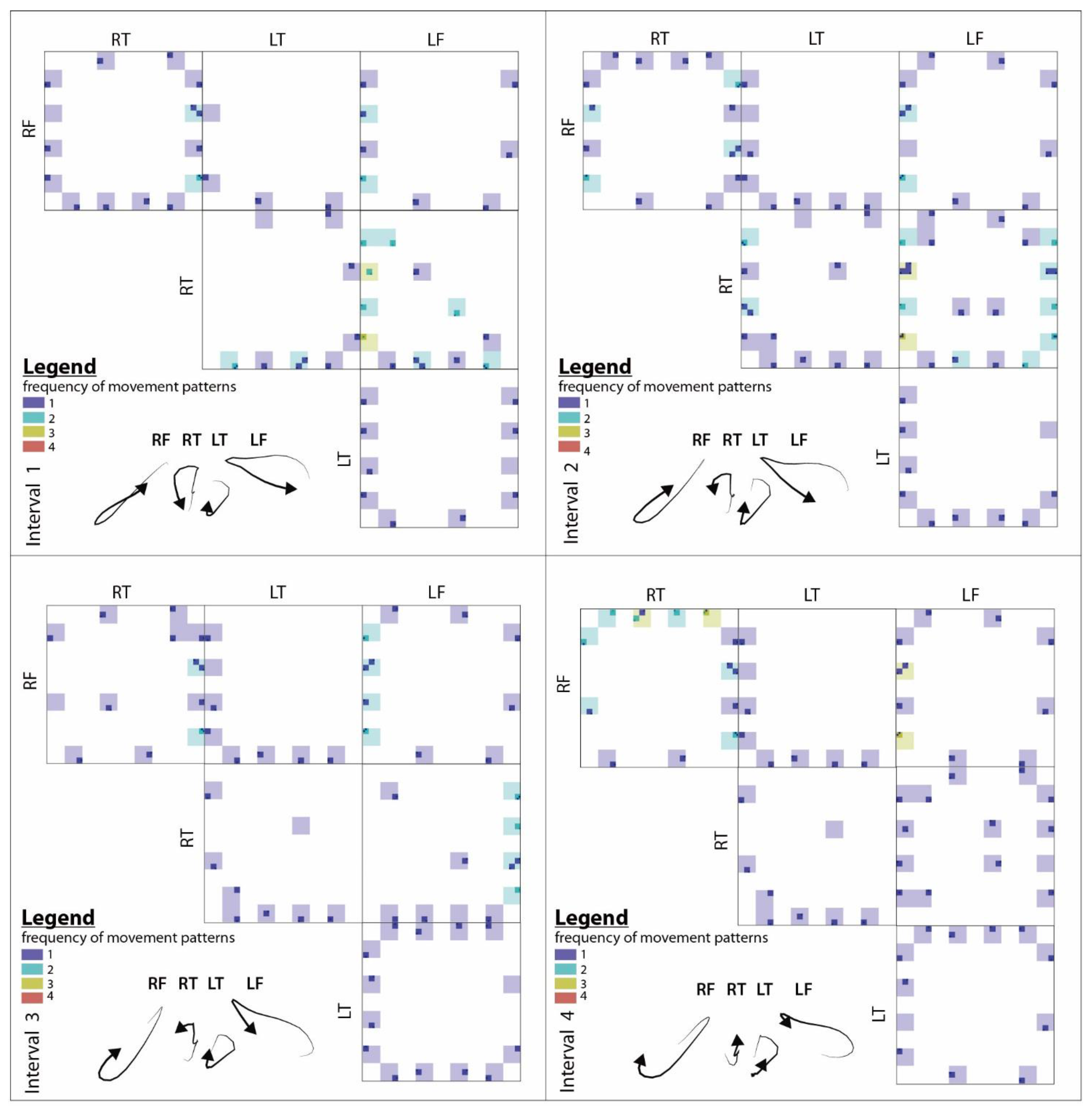
4.2. Example 2: Samba Dance




5. Discussion
6. Conclusions and Future Work
Supplementary Files
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Haghani, A.; Hamedi, M.; Sadabadi, K.F.; Young, S.; Tarnoff, P. Data collection of freeway travel time ground truth with Bluetooth sensors. Transp. Res. Rec. J. Transp. Res. Board 2009. [Google Scholar] [CrossRef]
- Cagnacci, F.; Boitani, L.; Powell, R.A.; Boyce, M.S. Animal ecology meets GPS-based radiotelemetry: A perfect storm of opportunities and challenges. Philos. Trans. R. Soc. B Biol. Sci. 2010. [Google Scholar] [CrossRef] [PubMed]
- Brockmann, D.; Hufnagel, L.; Geisel, T. The scaling laws of human travel. Nature 2006, 439, 462–465. [Google Scholar] [CrossRef] [PubMed]
- Wisbey, B.; Montgomery, P.G.; Pyne, D.B.; Rattray, B. Quantifying movement demands of AFL football using GPS tracking. J. Sci. Med. Sport 2010, 13, 531–536. [Google Scholar] [CrossRef] [PubMed]
- Versichele, M.; Neutens, T.; Delafontaine, M.; Van de Weghe, N. The use of Bluetooth for analysing spatiotemporal dynamics of human movement at mass events: A case study of the Ghent Festivities. Appl. Geogr. 2012, 32, 208–220. [Google Scholar] [CrossRef]
- Tiru, M.; Saluveer, E.; Ahas, R.; Aasa, A. Web-based monitoring tool for assessing space-time mobility of tourists using mobile positioning data: Positium Barometer. J. Urban Technol. 2010, 17, 71–89. [Google Scholar] [CrossRef]
- Ahlqvist, O.; Ban, H.; Cressie, N.; Shaw, N.Z. Statistical counterpoint: Knowledge discovery of choreographic information using spatio-temporal analysis and visualization. Appl. Geogr. 2010, 30, 548–560. [Google Scholar] [CrossRef]
- Chavoshi, S.H.; De Baets, B.; Neutens, T.; Ban, H.; Ahlqvist, O.; De Tre, G.; Van de Weghe, N. Knowledge discovery in choreographic data using relative motion matrices and dnamic time warping. Appl. Geogr. 2014, 47, 111–124. [Google Scholar] [CrossRef]
- Delafontaine, M.; Versichele, M.; Neutens, T.; Van de Weghe, N. Analysing spatiotemporal sequences in Bluetooth tracking data. Appl. Geogr. 2012, 34, 659–668. [Google Scholar] [CrossRef]
- Dodge, S.; Weibel, R.; Lautenschutz, A.K. Towards a taxonomy of movement patterns. Inf. Vis. 2008, 7, 240–252. [Google Scholar] [CrossRef] [Green Version]
- Shoval, N.; Isaacson, M. Sequence alignment as a method for human activity analysis in space and time. Ann. Assoc. Am. Geogr. 2007, 97, 282–297. [Google Scholar] [CrossRef]
- Wang, C.; De, D.; Song, W.Z. Trajectory mining from anonymous binary motion sensors in Smart Environment. Knowl. Sys. 2013, 37, 346–356. [Google Scholar] [CrossRef]
- Gudmundsson, J.; Wolle, T. Football analysis using spatio-temporal tools. Comput. Environ. Urban Sys. 2014, 47, 16–27. [Google Scholar] [CrossRef]
- Weld, D.S.; Kleer, J.D. Readings in Qualitative Reasoning about Physical Systems; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1989. [Google Scholar]
- Clementini, E.; Felice, P.D.; Hernández, D. Qualitative representation of positional information. Artif. Intell. 1997, 95, 317–356. [Google Scholar] [CrossRef]
- Cohn, A.G. Calculi for qualitative spatial reasoning. In Artificial Intelligence and Symbolic Mathematical Computation; Springer Berlin Heidelberg: Berlin, Germany, 1996; pp. 124–143. [Google Scholar]
- Monferrer, M.T.E.; Lobo, F.T. Qualitative velocity. In Topics in Artificial Intelligence; Springer Berlin Heidelberg: Berlin, Germany, 2002; pp. 29–39. [Google Scholar]
- Renz, J.; Rauh, R.; Knauff, M. Towards cognitive adequacy of topological spatial relations. Spat. Cogn. II 2000, 1849, 184–197. [Google Scholar]
- Muller, P. Topological spatio-temporal reasoning and representation. Comput. Intell. 2002, 18, 420–450. [Google Scholar] [CrossRef]
- Wolter, F.; Zakharyaschev, M. Qualitative spatio-temporal representation and reasoning: A computational perspective. Explor. Artif. Intell. New Millen. 2002, 175–216. [Google Scholar]
- Van de Weghe, N. Representing and Reasoning about Moving Objects: A Qualitative Approach. PhD Thesis, University of Ghent, Kortrijk, Belgium, 2004. [Google Scholar]
- Bellotto, N.; Hanheide, M.; Van de Weghe, N. Qualitative design and implementation of human-robot spatial interactions. In Social Robotics; Herrmann, G., Pearson, M., Lenz, A., Bremner, P., Spiers, A., Leonards, U., Eds.; Springer International Publishing: Berlin, Germany, 2013; pp. 331–340. [Google Scholar]
- Delafontaine, M.; Cohn, A.G.; Van de Weghe, N. Implementing a qualitative calculus to analyse moving point objects. Expert Sys. Appl. 2011, 38, 5187–5196. [Google Scholar] [CrossRef] [Green Version]
- Kisilevich, S.; Mansmann, F.; Nanni, M.; Rinzivillo, S. Spatio-temporal clustering. In Data Mining and Knowledge Discovery Handbook; Maimon, O., Rokach, L., Eds.; Springer US: NY, US, 2010; pp. 855–874. [Google Scholar]
- Alon, J.; Sclaroff, S.; Kollios, G.; Pavlovic, V. Discovering clusters in motion time-series data. IEEE Comput. Vis. Pattern Recognit. 2003, 1, 375–381. [Google Scholar]
- Chudova, D.; Gaffney, S.; Mjolsness, E.; Smyth, P. Translation-invariant mixture models for curve clustering. In Proceedings of the 9th International Conference on Knowledge Discovery and Data mining (ACM SIGKDD), New York, NY, USA, 24–27 August 2003; pp. 79–88.
- Nanni, M.; Pedreschi, D. Time-focused clustering of trajectories of moving objects. J. Intell. Inf. Sys. 2006, 27, 267–289. [Google Scholar] [CrossRef]
- Andrienko, N.; Andrienko, G. Exploratory Analysis of Spatial and Temporal Data; Springer: Berlin, Germany, 2006. [Google Scholar]
- Hwang, S.Y.; Liu, Y.H.; Chiu, J.K.; Lim, E.P. Mining mobile group patterns: A trajectory-based approach. In Advances in Knowledge Discovery and Data Mining; Springer: Berlin, Germany, 2005; pp. 145–146. [Google Scholar]
- Gudmundsson, J.; van Kreveld, M. Computing longest duration flocks in trajectory data. In Proceedings of the 14th Annual ACM International Symposium on Advances in Geographic Information Systems, New York, NY, USA, 5–11 November 2006; pp. 35–42.
- Kang, J.H.; Welbourne, W.; Stewart, B.; Borriello, G. Extracting places from traces of locations. In Proceedings of the 2nd ACM International Workshop on Wireless Mobile Applications and Services on WLAN Hotspots, ACM, New York, NY, USA, 1 October 2004; pp. 110–118.
- Giannotti, F.; Nanni, M.; Pinelli, F.; Pedreschi, D. Trajectory pattern mining. In Proceedings of the 13th International Conference on Knowledge Discovery and Data Mining (ACM SIGKDD), ACM, San Jose, CA, USA, 12–15 August 2007; pp. 330–339.
- Giannotti, F.; Pedreschi, D. Mobility, Data Mining and Privacy: Geographic Knowledge Discovery; Springer: Berlin, Germany, 2008. [Google Scholar]
- Laube, P.; Purves, R.S. How fast is a cow? cross-scale analysis of movement data. Trans. GIS 2011, 15, 401–418. [Google Scholar] [CrossRef]
- Long, J.A.; Nelson, T.A. Measuring dynamic interaction in movement data. Trans. GIS 2013, 17, 62–77. [Google Scholar] [CrossRef]
- Andrienko, N.; Andrienko, G. Designing visual analytics methods for massive collections of movement data. Cartographica 2007, 42, 117–138. [Google Scholar] [CrossRef]
- Andrienko, N.; Andrienko, G.; Wachowicz, M.; Orellana, D. Uncovering interactions between moving objects. In Proceedings of 5th international conference on GIScience, Park City, UT, USA, 23–26 September 2008; pp. 16–26.
- Laube, P.; Imfeld, S.; Weibel, R. Discovering relative motion patterns in groups of moving point objects. Int. J. of Geogr. Inf. Sci. 2005, 19, 639–668. [Google Scholar] [CrossRef]
- Ooms, K.; Andrienko, G.; Andrienko, N.; De Maeyer, P.; Fack, V. Analysing the spatial dimension of eye movement data using a visual analytic approach. Expert Sys. Appl. 2012, 39, 1324–1332. [Google Scholar] [CrossRef] [Green Version]
- Pelekis, N.; Andrienko, G.; Andrienko, N.; Kopanakis, I.; Marketos, G.; Theodoridis, Y. Visually exploring movement data via similarity-based analysis. J. Intell. Inf. Sys. 2012, 38, 343–391. [Google Scholar] [CrossRef]
- Rinzivillo, S.; Pedreschi, D.; Nanni, M.; Giannotti, F.; Andrienko, N.; Andrienko, G. Visually driven analysis of movement data by progressive clustering. Inf. Vis. 2008, 7, 225–239. [Google Scholar] [CrossRef]
- Chavoshi, S.H.; De Baets, B.; Qiang, Y.; De Tré, G.; Van de Weghe, N. A qualitative approach to the identification, visualization and interpretation of repetitive motion patterns within groups of moving point objects. Int. Arab J. Inf. Technol. 2015, in press. [Google Scholar]
- Demsar, U.; Virrantaus, K. Space-time density of trajectories: Exploring spatio-temporal patterns in movement data. Int. J. Geogr. Inf. Sci. 2010, 24, 1527–1542. [Google Scholar] [CrossRef]
- Gudmundsson, J.; van Kreveld, M.; Speckmann, B. Efficient detection of patterns in 2D trajectories of moving points. GeoInformatica 2007, 11, 195–215. [Google Scholar] [CrossRef]
- Wilson, C. Activity patterns in space and time: Calculating representative Hagerstrand trajectories. Transportation 2008, 35, 485–499. [Google Scholar] [CrossRef]
- Buchin, K.; Buchin, M.; Van Kreveld, M.; Luo, J. Finding long and similar parts of trajectories. In Proceedings of 17th international conference on advances in geographic information systems (ACM SIGSPATIAL GIS 2009), ACM, Seattle, WA, USA, 4–6 November 2009; pp. 296–305.
- Dodge, S.; Weibel, R.; Forootan, E. Revealing the physics of movement: Comparing the similarity of movement characteristics of different types of moving objects. Comput. Environ. Urban Sys. 2009, 33, 419–434. [Google Scholar] [CrossRef] [Green Version]
- Lin, B.; Su, J.W. One way distance: For shape based similarity search of moving object trajectories. Geoinformatica 2008, 12, 117–142. [Google Scholar] [CrossRef]
- Dodge, S. Exploring movement using similarity analysis. PhD Thesis, University of Zurich, 2011. [Google Scholar]
- Giannotti, F.; Pedreschi, D. Mobility, data mining and privacy: A vision of convergence. In Mobility, data mining and privacy-geographic knowledge discovery; Giannotti, F., Pedreschi, D., Eds.; Springer: Berlin, Germany, 2008; pp. 1–11. [Google Scholar]
- Glez-Cabrera, F.J.; Álvarez-Bravo, J.V.; Díaz, F. Representing motion patterns with the qualitative rectilinear projection calculus. In Distributed Computing and Artificial Intelligence; Springer: Berlin, Germany, 2013; pp. 251–258. [Google Scholar]
- Van de Weghe, N.; Cohn, A.G.; De Tré, G.; De Maeyer, P. A qualitative trajectory calculus as a basis for representing moving objects in geographical information systems. Control Cybern. 2006, 35, 97–119. [Google Scholar]
- Van de Weghe, N.; Cohn, A.G.; De Maeyer, P.; Witlox, F. Representing moving objects in computer-based expert systems: The overtake event example. Expert Sys. Appl. 2005, 29, 977–983. [Google Scholar] [CrossRef]
- Delafontaine, M.; Van de Weghe, N.; Bogaert, P.; De Maeyer, P. Qualitative relations between moving objects in a network changing its topological relations. Inf. Sci. 2008, 178, 1997–2006. [Google Scholar] [CrossRef]
- Delafontaine, M.; Chavoshi, S.H.; Cohn, A.G.; Van de Weghe, N. A qualitative trajectory calculus to reason about moving point objects. In Qualitative Spatio-Temporal Representation and Reasoning: Trends and Future Directions; Hazarika, S.M., Ed.; IGI Global: Hershey, PA, USA, 2012; pp. 147–167. [Google Scholar]
- Cohn, A.G.; Hazarika, S.M. Qualitative spatial representation and reasoning: An overview. Fundam. Inf. 2001, 46, 1–29. [Google Scholar]
- Galton, A. Dominance diagrams: A tool for qualitative reasoning about continuous systems. Fundam. Inf. 2001, 46, 55–70. [Google Scholar]
- Forbus, K.D. Qualitative process theory. Artif. Intell. 1984, 24, 85–168. [Google Scholar] [CrossRef]
- Barnsley, M.F. Fractals Everywhere; Academic Press: New York, NY, USA, 1988. [Google Scholar]
- Rokach, L.; Maimon, O. A survey of clustering algorithms. In Data Mining and Knowledge Discovery Handbook; Rokach, L., Maimon, O., Eds.; Springer: Berlin, Germany, 2010; pp. 269–298. [Google Scholar]
- Dawyndt, P.; De Meyer, H.; De Baets, B. The complete linkage clustering algorithm revisited. Soft Comput. 2005, 9, 385–392. [Google Scholar] [CrossRef]
- Freksa, C. Temporal reasoning based on semi-intervals. Artif. Intell. 1992, 54, 199–227. [Google Scholar] [CrossRef]
- Chavoshi, S.H.; De Baets, B.; Neutens, T.; De Tre, G.; Van de Weghe, N. Exploring dance movement data using sequence alignment methods. PLoS ONE 2015, 10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schönauer, C.; Pintaric, T.; Kaufmann, H. Full body interaction for serious games in motor rehabilitation. In Proceedings of the 2nd Augmented Human International Conference, Tokyo, Japan, 13 March 2011; p. 4.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chavoshi, S.H.; De Baets, B.; Neutens, T.; Delafontaine, M.; De Tré, G.; De Weghe, N.V. Movement Pattern Analysis Based on Sequence Signatures. ISPRS Int. J. Geo-Inf. 2015, 4, 1605-1626. https://doi.org/10.3390/ijgi4031605
Chavoshi SH, De Baets B, Neutens T, Delafontaine M, De Tré G, De Weghe NV. Movement Pattern Analysis Based on Sequence Signatures. ISPRS International Journal of Geo-Information. 2015; 4(3):1605-1626. https://doi.org/10.3390/ijgi4031605
Chicago/Turabian StyleChavoshi, Seyed Hossein, Bernard De Baets, Tijs Neutens, Matthias Delafontaine, Guy De Tré, and Nico Van De Weghe. 2015. "Movement Pattern Analysis Based on Sequence Signatures" ISPRS International Journal of Geo-Information 4, no. 3: 1605-1626. https://doi.org/10.3390/ijgi4031605