

Spatiotemporal Predictive Geo-Visualization of Criminal Activity for Application to Real-Time Systems for Crime Deterrence, Prevention and Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Works Related to the Concept of Spatiotemporal Predictive Geo-Visualization
3. Development of an Effective Tool for the Spatiotemporal Predictive Geo-Visualization of Activity for Real-Time Systems
3.1. Sources of Information and Pre-Processing
3.2. Geographic Spatial Grouping of the Observation Area for Its Correlation
3.3. Temporal Grouping of the Criminal Events of the Observation Area for Correlation
3.4. Data Forecasting and Its Spatiotemporal Geo-Visualization
- Make forecasts continuously, for short time horizons, and in a useful timeframe as close as possible to real time.
- Be frequently retrained using the largest amount of data from real events in such a way that it not only enhances the forecasts’ reliability but also allows commanders and analysts to observe possible trends in criminal activity more precisely.
- Be as simple as possible, so that its computational cost does not become an obstacle to its proper functioning and model overfitting risks are avoided.
- Provide the visualization of criminal activity forecasts on a map and with timelines.
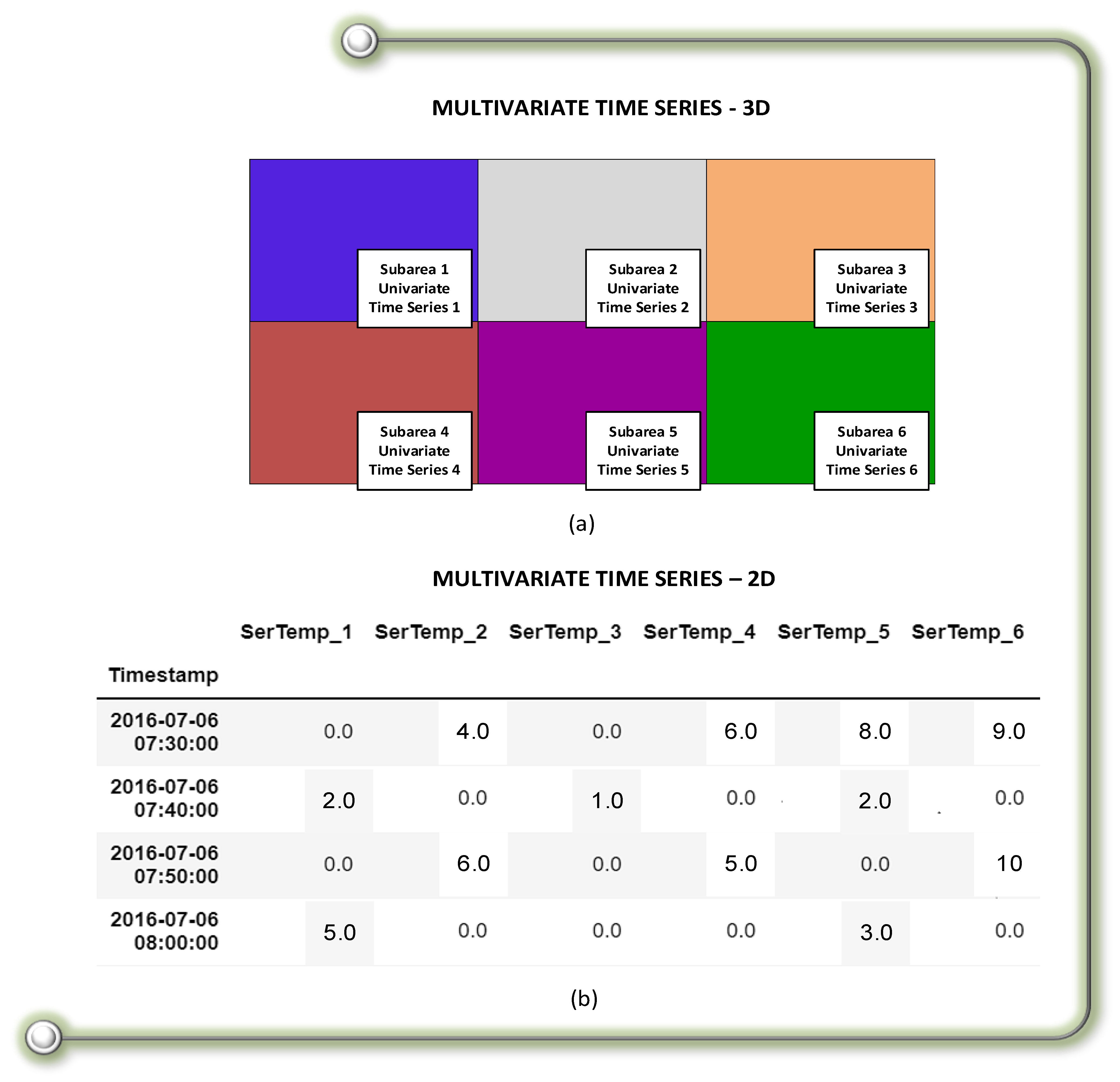
- Spatial correlation is achieved between the sub-areas of the observation area when forecasting future events, as each of the univariate time series conforms with the densities of criminal events in each of the sub-areas. Prediction algorithms take this spatial relationship into account, without the need to provide the location parameter (latitude and length) as a predictor variable.
- Temporal correlation between the sub-areas of the observation area is achieved when forecasting future events, as each of the univariate time series is fitted with the densities of the criminal events of each of the sub-areas. Prediction algorithms take this temporal relationship into account, without the to provide the timestamp parameter as a predictor variable.
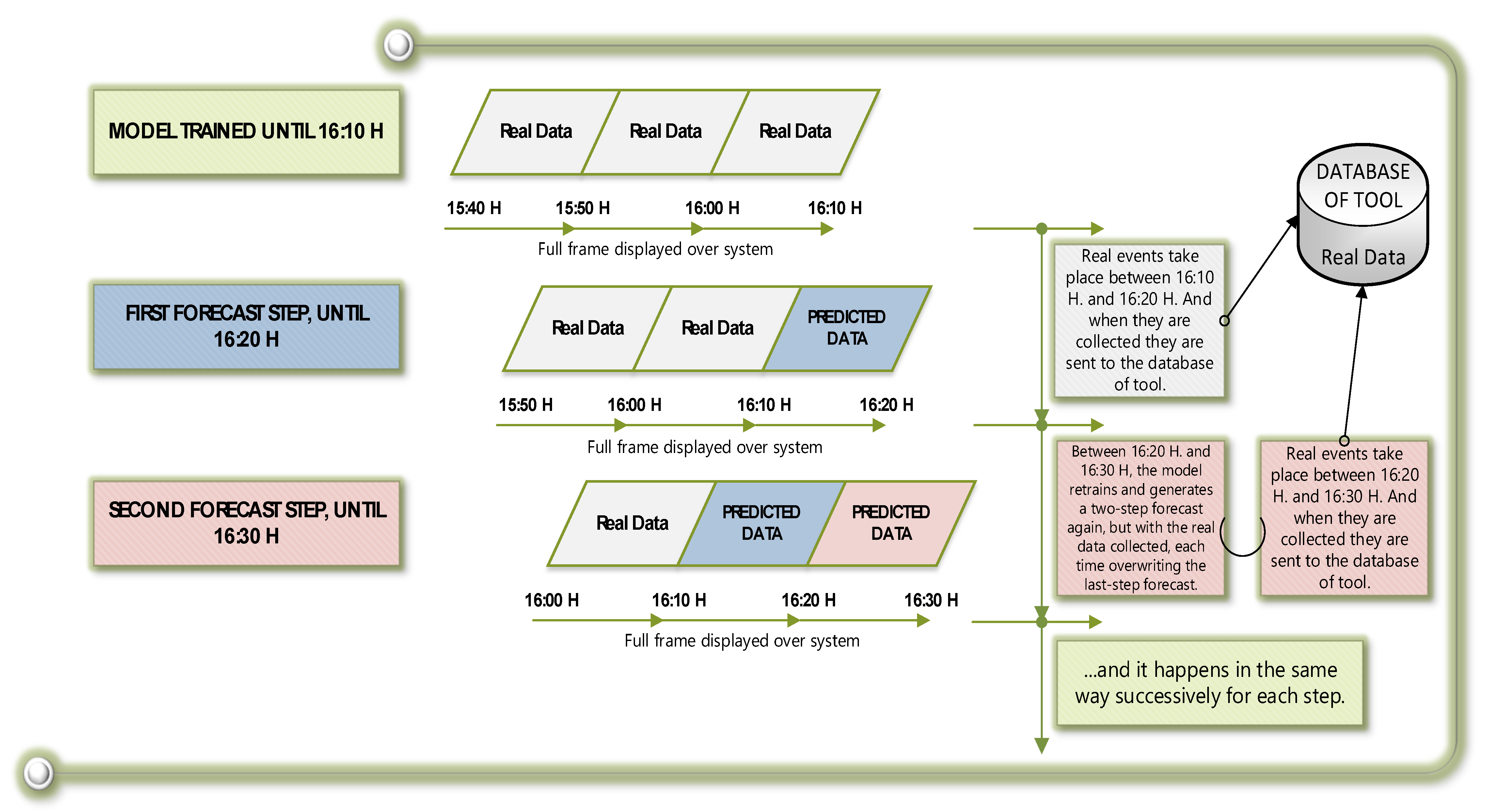
- Be retrained and generate multi-parallel forecasts in a time shorter than the duration of one forecast step of time, that is, in a time shorter than the frequency of the multivariate time series, which, in this case, is 10 min.
- Have the capacity to generate reliable forecasts for a time horizon of at least two steps at a time, since, with single-step forecasts, continuity in geo-visualization cannot be realized. This is because the time slot will not be long enough to collect new information, retrain the model, and generate new forecasts.
- Be as simple and efficient as possible so that everything described above can be fulfilled.
- Seasonality: the multivariate time series discussed here does not present seasonality, especially as it is a multivariate high-frequency sparse-type time series.
- Stationarity: the multivariate time series discussed here turns out to be stationary, so there is no need to perform any type of transformation on the data to achieve it. Stationarity was tested using the Dickey–Fuller test.
3.4.1. Baseline Model
- Time series are a particular case of stochastic processes; therefore, their models are also usually stochastic. This means that they present a certain randomness in their parameters, which is why, when training a model, the values of the error metrics may vary. The implication here is that, when measuring the performance of one of these models, several tests are carried out and the error metrics are averaged. That is, the average is considered the performance value of the model. As a consequence, the values of the error metrics of the models shown in the following sections correspond to the average values of the operation of each model.
- Once the requirements of the system and also those of the predictive models and its forecasts are clarified, the description of the models offered below is based on the methodology of taking all those that meet the initial requirements, according to the nature of the data, and gradually discarding those that do not exceed some thresholds based on the performance criteria. In other words, all possible models are tested, and a filter is used for those where the operation does not meet the needs of the data and of the system, in order to continue working on adjusting only those that provide the expected functionalities.
- For each model, the walk-forward validation technique was used; in this way, not only was the error metric calculated, but the time spent by each model in retraining and generating new forecasts was also verified.
- A model can be considered useful if its two-time-step forecast error metric is less than the reference model’s error metric.
3.4.2. Classical Models for Forecasting Multivariate Time Series
3.4.3. Machine Learning (Including Deep Learning) Models for the Forecast of Multivariate Time Series
- The automatic learning of linear and non-linear relationships.
- Learning time structures that present data such as trends and seasonality.
- The handling of long sequences and noisy data.
- Theulti-parallel forecasting of several input and output steps without making assumptions about mapping functions.
- Operating with datasets with missing and sparse values, among others.
- Finally, although the stationary time series represents an advantage, it is not a mandatory requirement for its use.
- 1.
- MLP (multilayer perceptron): this is a simple neural network model that offers an excellent solution for this prediction problem. Figure 9 shows the configuration, the network diagram, and the results of this neural network.
- 2.
- CNN-1D (Convolutional Neural Network-1D): in general, convolutional neural networks, whether 1D, 2D, or 3D, are designed to preserve spatial structures in raw input data; this is called representation learning. CNNs manage to extract the characteristics of the data regardless of how they are produced, since they remain invariant with the position of the objects and the distortion of the scenes. The CNN-1D, which retains these beneficial features, is ideal for time series forecasting, since time series are sequences of observations that can be treated as one-dimensional images from which the model can extract its main elements, mapping a sequence of earlier observations from the raw data as the input to one or more future observations as the output.
- 3.
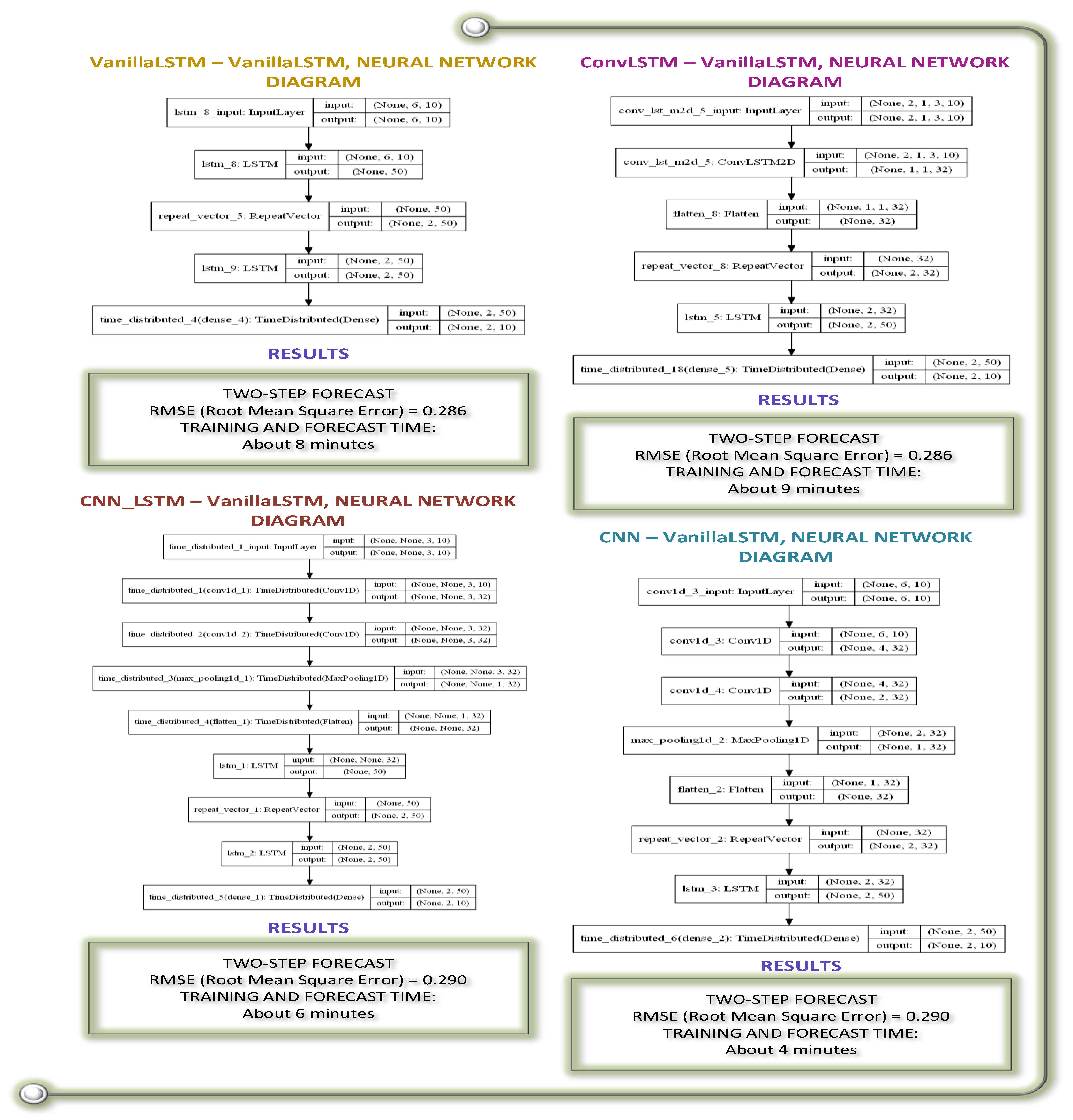
- LSTM (Long Short-Term Memory): by their nature, LSTM neural networks read one-time steps from the sequence at a given time and create the representation of that internal step to use as learned context when making forecasts. In other words, LSTM neural networks offer native support for sequences such as time series. The LSTM models that offer viable solutions for this prediction problem according to their convergence (training time and forecast generation), the possibility of forecasting at least two steps, and an acceptable performance that would improve the performance of the reference model, with data in Float 32, are:
- The Vanilla-LSTM model
- The CNN-LSTM model
- The ConvLSTM model
- (VanillaLSTM—VanillaLSTM) model.
- (ConvLSTM—VanillaLSTM) model.
- (CNN_LSTM—VanillaLSTM) model.
- (CNN—VanillaLSTM) model.
3.4.4. Forecast Geo-Visualization
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hinkle, J.C.; Weisburd, D.; Telep, C.W.; Petersen, K. Problem-oriented policing for reducing crime and disorder: An updated systematic review and meta-analysis. Campbell Syst. Rev. 2020, 16, e1089. [Google Scholar] [CrossRef] [PubMed]
- Canter, D.Y.D. Crime and Society; Youngs, D., Ed.; Routledge: Oxfordshire, UK, 2018; ISBN 9781351207430. [Google Scholar]
- Esteve, M.; Perez-Llopis, I.; Palau, C.E. Friendly force tracking COTS solution. IEEE Aerosp. Electron. Syst. Mag. 2013, 28, 14–21. [Google Scholar] [CrossRef]
- Esteve, M.; Perez-Llopis, I.; Hernandez-Blanco, L.E.; Palau, C.E.; Carvajal, F. SIMACOP: Small Units Management C4ISR System. In Proceedings of the 2007 IEEE International Conference on Multimedia and Expo, Beijing, China, 2–5 July 2007; IEEE: New York, NY, USA, 2007; Volume 46022, pp. 1163–1166. [Google Scholar]
- Suarez-Paez, J.; Salcedo-Gonzalez, M.; Climente, A.; Esteve, M.; Gómez, J.A.; Palau, C.E.; Pérez-Llopis, I. A novel low processing time system for criminal activities detection applied to command and control citizen security centers. Information 2019, 10, 365. [Google Scholar] [CrossRef] [Green Version]
- Suarez-Paez, J.; Salcedo-Gonzalez, M.; Esteve, M.; Gómez, J.A.; Palau, C.; Pérez-Llopis, I. Reduced computational cost prototype for street theft detection based on depth decrement in Convolutional Neural Network. Application to Command and Control Information Systems (C2IS) in the National Police of Colombia. Int. J. Comput. Intell. Syst. 2019, 12, 123. [Google Scholar] [CrossRef]
- Guevara, C.; Santos, M. Crime prediction for patrol routes generation using machine learning. In Advances in Intelligent Systems and Computing; Springer International Publishing: Cham, Switzerland, 2021; Volume 1267, pp. 97–107. [Google Scholar]
- Araujo, A.; Cacho, N.; Bezerra, L.; Vieira, C.; Borges, J. Towards a Crime Hotspot Detection Framework for Patrol Planning. In Proceedings of the 2018 IEEE 20th International Conference on High Performance Computing and Communications; IEEE 16th International Conference on Smart City; IEEE 4th International Conference on Data Science and Systems (HPCC/SmartCity/DSS), Exeter, UK, 28–30 June 2018; pp. 1256–1263. [Google Scholar]
- Camacho-Collados, M.; Liberatore, F. A Decision Support System for predictive police patrolling. Decis. Support Syst. 2015, 75, 25–37. [Google Scholar] [CrossRef]
- University of Maryland. National Consortium for the Study of Terrorism and Responses to Terrorism. Available online: https://www.start.umd.edu (accessed on 29 February 2020).
- University of Maryland. Global Terrorism Database. Available online: https://www.start.umd.edu/gtd/ (accessed on 29 February 2020).
- Institute for Economics & Peace. Global Terrorism Index 2020; Institute for Economics & Peace: Sydney, NSW, Australia, 2020. [Google Scholar]
- Lacinák, M.; Ristvej, J. Smart City, Safety and Security. Procedia Eng. 2017, 192, 522–527. [Google Scholar] [CrossRef]
- Seyedsayamdost, E. Sustainable Development Goals. Available online: https://www.undp.org/content/undp/en/home/sustainable-development-goals.html (accessed on 29 February 2020).
- Santillan, J.R.; Makinano-Santillan, M.; Amora, A.M.; Morales, E.M.O.; Cutamora, L.C.; Asube, L.C.S. Near-real time simulation and geo-visualization of flooding in the Philippines’ deepest lake. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; IEEE: New York, NY, USA, 2016; pp. 7573–7576. [Google Scholar]
- Hardyns, W.; Rummens, A. Predictive Policing as a New Tool for Law Enforcement? Recent Developments and Challenges. Eur. J. Crim. Policy Res. 2018, 24, 201–218. [Google Scholar] [CrossRef]
- Shiode, S.; Shiode, N. Microscale prediction of near-future crime concentrations with street-level geosurveillance. Geogr. Anal. 2014, 46, 435–455. [Google Scholar] [CrossRef]
- Sukhija, K.; Singh, S.N.; Kumar, J. Spatial visualization approach for detecting criminal hotspots: An analysis of total cognizable crimes in the state of Haryana. In Proceedings of the 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 19–20 May 2018; IEEE: New York, NY, USA, 2018; pp. 1060–1066. [Google Scholar]
- Yang, D.; Heaney, T.; Tonon, A.; Wang, L.; Cudr, P. CrimeTelescope: Crime hotspot prediction based on urban and social media data fusion. World Wide Web 2017, 21, 1323–1347. [Google Scholar] [CrossRef] [Green Version]
- Runadi, T.; Widyaningsih, Y. Application of hotspot detection using spatial scan statistic: Study of criminality in Indonesia. In Statistics and Its Applications, Proceedings of the 2nd International Conference on Applied Statistics (ICAS II), Jawa Barat, Indonesia, 27–28 September 2016; AIP: Woodbury, LI, USA, 2017; Volume 1827. [Google Scholar]
- Giménez-Santana, A.; Caplan, J.M.; Drawve, G. Risk Terrain Modeling and Socio-Economic Stratification: Identifying Risky Places for Violent Crime Victimization in Bogotá, Colombia. Eur. J. Crim. Policy Res. 2018, 24, 417–431. [Google Scholar] [CrossRef]
- Rosser, G.; Davies, T.; Bowers, K.J.; Johnson, S.D.; Cheng, T. Predictive Crime Mapping: Arbitrary Grids or Street Networks? J. Quant. Criminol. 2017, 33, 569–594. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, D. Contrast Pattern Based Methods for Visualizing and Predicting Spatiotemporal Events. In Proceedings of the 2015 IEEE International Conference on Data Mining Workshop (ICDMW), Atlantic City, NJ, USA, 14–17 November 2015; IEEE: New York, NY, USA, 2016; pp. 1560–1567. [Google Scholar]
- Lin, Y.L.; Chen, T.Y.; Yu, L.C. Using Machine Learning to Assist Crime Prevention. In Proceedings of the 2017 6th IIAI International Congress on Advanced Applied Informatics (IIAI-AAI), Hamamatsu, Japan, 9–13 July 2017; IEEE: New York, NY, USA, 2017; pp. 1029–1030. [Google Scholar]
- Kang, H.W.; Kang, H.B. Prediction of crime occurrence from multimodal data using deep learning. PLoS ONE 2017, 12, e0176244. [Google Scholar]
- Wang, B.; Yin, P.; Bertozzi, A.L.; Brantingham, P.J.; Osher, S.J.; Xin, J. Deep Learning for Real-Time Crime Forecasting and Its Ternarization. Chinese Ann. Math. Ser. B 2019, 40, 949–966. [Google Scholar] [CrossRef] [Green Version]
- Catlett, C.; Cesario, E.; Talia, D.; Vinci, A. Spatio-temporal crime predictions in smart cities: A data-driven approach and experiments. Pervasive Mob. Comput. 2019, 53, 62–74. [Google Scholar] [CrossRef]
- Flaxman, S.; Chirico, M.; Pereira, P.A.U.; Loeffler, C. Scalable high-resolution forecasting of sparse spatiotemporal events with kernel methods: A winning solution to the NIJ “real-time crime forecasting challenge”. Ann. Appl. Stat. 2019, 13, 2564–2585. [Google Scholar] [CrossRef]
- Baculo, M.J.C.; Marzan, C.S.; De Dios Bulos, R.; Ruiz, C. Geospatial-temporal analysis and classification of criminal data in Manila. In Proceedings of the 2017 2nd IEEE International Conference on Computational Intelligence and Applications (ICCIA), Beijing, China, 8–11 September 2017; IEEE: New York, NY, USA, 2017; pp. 6–11. [Google Scholar]
- Rummens, A.; Hardyns, W. The effect of spatiotemporal resolution on predictive policing model performance. Int. J. Forecast. 2021, 37, 125–133. [Google Scholar] [CrossRef]
- Rummens, A.; Hardyns, W. Comparison of near-Repeat, Machine Learning and Risk Terrain Modeling for Making Spatiotemporal Predictions of Crime. Appl. Spat. Anal. Policy 2020, 13, 1035–1053. [Google Scholar] [CrossRef]
- Kim, D.; Jung, S.; Jeong, Y. Theft prediction model based on spatial clustering to reflect spatial characteristics of adjacent lands. Sustainability 2021, 13, 7715. [Google Scholar] [CrossRef]
- Tianyi, Z.; Yibing, R.; Dong, W. Application of Grid Management in Spatio-temporal Prediction of Crime. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; IEEE: New York, NY, USA, 2021; pp. 2745–2749. [Google Scholar]
- Qian, Y.; Pan, L.; Wu, P.; Xia, Z. GeST: A grid embedding based spatio-temporal correlation model for crime prediction. In Proceedings of the 2020 IEEE Fifth International Conference on Data Science in Cyberspace (DSC), Hong Kong, China, 27–30 July 2020; IEEE: New York, NY, USA, 2020; pp. 1–7. [Google Scholar]
- Sun, J.; Yue, M.; Lin, Z.; Yang, X.; Nocera, L.; Kahn, G.; Shahabi, C. CrimeForecaster: Crime Prediction by Exploiting the Geographical Neighborhoods’ Spatiotemporal Dependencies. In Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2021; Volume 12461, pp. 52–67. [Google Scholar]
- Lin, Y.L.; Yen, M.F.; Yu, L.C. Grid-based crime prediction using geographical features. ISPRS Int. J. Geo Inf. 2018, 7, 298. [Google Scholar] [CrossRef] [Green Version]
- Duan, L.; Ye, X.; Hu, T.; Zhu, X. Prediction of suspect location based on spatiotemporal semantics. ISPRS Int. J. Geo Inf. 2017, 6, 185. [Google Scholar] [CrossRef] [Green Version]
- Adepeju, M.; Rosser, G.; Cheng, T. Novel evaluation metrics for sparse spatio-temporal point process hotspot predictions—A crime case study. Int. J. Geogr. Inf. Sci. 2016, 30, 2133–2154. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Cheng, T. Graph deep learning model for network-based predictive hotspot mapping of sparse spatio-temporal events. Comput. Environ. Urban Syst. 2020, 79, 101403. [Google Scholar] [CrossRef]
- Jendryke, M.; McClure, S.C. Spatial prediction of sparse events using a discrete global grid system; a case study of hate crimes in the USA. Int. J. Digit. Earth 2021, 14, 789–805. [Google Scholar] [CrossRef]
- Andersson, V.O.; Birck, M.A.F.; Araujo, R.M. Investigating Crime Rate Prediction Using Street-Level Images and Siamese Convolutional Neural Networks. Commun. Comput. Inf. Sci. 2017, 720, 81–93. [Google Scholar]
- Esquivel, N.; Peralta, B.; Nicolis, O. Crime Level Prediction using Stacked Maps with Deep Convolutional Autoencoder. In Proceedings of the 2019 IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Valparaiso, Chile, 13–27 November 2019. [Google Scholar]
- Muthamizharasan, M.; Ponnusamy, R. Forecasting Crime Event Rate with a CNN-LSTM Model. Lect. Notes Data Eng. Commun. Technol. 2022, 96, 461–470. [Google Scholar]
- Yadav, R.; Kumari Sheoran, S. Crime Prediction Using Auto Regression Techniques for Time Series Data. In Proceedings of the 2018 3rd International Conference and Workshops on Recent Advances and Innovations in Engineering (ICRAIE), Jaipur, India, 22–25 November 2018; IEEE: New York, NY, USA, 2018; pp. 22–25. [Google Scholar]
- Yadav, R.; Kumari Sheoran, S. Modified ARIMA Model for Improving Certainty in Spatio-Temporal Crime Event Prediction. In Proceedings of the 2018 3rd International Conference and Workshops on Recent Advances and Innovations in Engineering (ICRAIE), Jaipur, India, 22–25 November 2018; IEEE: New York, NY, USA, 2018; Volume 2018, pp. 22–25. [Google Scholar]
- Chan, S.; Oktavianti, I.; Puspita, V. A Deep Learning CNN and AI-Tuned SVM for Electricity Consumption Forecasting: Multivariate Time Series Data. In Proceedings of the 2019 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; IEEE: New York, NY, USA, 2019; pp. 488–494. [Google Scholar]
- Vakitbilir, N.; Hilal, A.; Direkoğlu, C. Hybrid deep learning models for multivariate forecasting of global horizontal irradiation. Neural Comput. Appl. 2022, 34, 8005–8026. [Google Scholar] [CrossRef]
- Zhang, L.; Gorovits, A.; Zhang, W.; Bogdanov, P. Learning periods from incomplete multivariate time series. In Proceedings of the 2020 IEEE International Conference on Data Mining (ICDM), Sorrento, Italy, 17–20 November 2020; IEEE: New York, NY, USA, 2020; pp. 1394–1399. [Google Scholar]
- Ojeda, S.A.A.; Solano, G.A.; Peramo, E.C. Multivariate Time Series Imaging for Short-Term Precipitation Forecasting Using Convolutional Neural Networks. In Proceedings of the 2020 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Fukuoka, Japan, 19–21 February 2020; IEEE: New York, NY, USA, 2020; pp. 33–38. [Google Scholar]
- Menacho Chiok, C.H. Comparación de los métodos de series de tiempo y redes neuronales. An. Científicos 2014, 75, 245. [Google Scholar] [CrossRef]
- Boppuru, P.R.; Ramesha, K. Spatio-temporal crime analysis using KDE and ARIMA models in the Indian context. Int. J. Digit. Crime Forensics 2020, 12, 1–19. [Google Scholar] [CrossRef]
- Makridakis, S.; Spiliotis, E.; Assimakopoulos, V. Statistical and Machine Learning forecasting methods: Concerns and ways forward. PLoS ONE 2018, 13, e0194889. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Lu, T. A Hybrid Model of Crime Prediction. J. Phys. Conf. Ser. 2019, 1168, 032031. [Google Scholar] [CrossRef]
- Marzan, C.S.; De Dios Bulos, R.; Baculo, M.J.C.; Ruiz, C. Time series analysis and crime pattern forecasting of city crime data. ACM Int. Conf. Proceeding Ser. 2017, 1320, 113–118. [Google Scholar]
- Wang, K.; Zhu, P.; Zhu, H.; Cui, P.; Zhang, Z. An interweaved time series locally connected recurrent neural network model on crime forecasting. In Neural Information Processing: 24th International Conference, ICONIP 2017, Guangzhou, China, 14–18 November 2017; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10638, pp. 466–474. [Google Scholar]
- Chung, J.; Kim, H. Crime Risk Maps: A Multivariate Spatial Analysis of Crime Data. Geogr. Anal. 2019, 51, 475–499. [Google Scholar] [CrossRef]
- Wang, D.; Zheng, Y.; Lian, H.; Li, G. High-Dimensional Vector Autoregressive Time Series Modeling via Tensor Decomposition. J. Am. Stat. Assoc. 2021, 117, 1338–1356. [Google Scholar] [CrossRef]
- Hou, C.; Wu, J.; Cao, B.; Fan, J. A deep-learning prediction model for imbalanced time series data forecasting. Big Data Min. Anal. 2021, 4, 266–278. [Google Scholar] [CrossRef]
- Yin, J.; Rao, W.; Zhao, K.; Yuan, M.; Zeng, J.; Zhang, C.; Li, J.F.; Zhao, Q. Experimental study of multivariate time series forecasting models. In Proceedings of the CIKM ‘19, Proceedings of the 28th ACM International Conference on Information and Knowledge Management, Beijing, China, 3–7 November 2019; ACM: New York, NY, USA, 2019; pp. 2833–2839. [Google Scholar]
- Shen, F.; Liu, J.; Wu, K. Multivariate Time Series Forecasting Based on Elastic Net and High-Order Fuzzy Cognitive Maps: A Case Study on Human Action Prediction through EEG Signals. IEEE Trans. Fuzzy Syst. 2021, 29, 2336–2348. [Google Scholar] [CrossRef]
- Davis, R.A.; Zang, P.; Zheng, T. Sparse Vector Autoregressive Modeling. J. Comput. Graph. Stat. 2016, 25, 1077–1096. [Google Scholar] [CrossRef] [Green Version]
- Kiranyaz, S.; Avci, O.; Abdeljaber, O.; Ince, T.; Gabbouj, M.; Inman, D.J. 1D convolutional neural networks and applications: A survey. Mech. Syst. Signal Process. 2021, 151, 107398. [Google Scholar] [CrossRef]
- Schubert, M.; Schanze, T. Estimation of Sparse VAR Models with Artificial Neural Networks for the Analysis of Biosignals. Proc. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. EMBS 2019, 2, 4623–4627. [Google Scholar]
- Carrizosa, E.; Olivares-Nadal, A.V.; Ramírez-Cobo, P. A sparsity-controlled vector autoregressive model. Biostatistics 2017, 18, 244–259. [Google Scholar] [CrossRef]
- Wilms, I.; Basu, S.; Bien, J.; Matteson, D.S. Sparse Identification and Estimation of Large-Scale Vector AutoRegressive Moving Averages. J. Am. Stat. Assoc. 2021, 118, 571–582. [Google Scholar] [CrossRef]
- Estrat, N.P. Plan Estratégico Institucional 2019–2022; Policía Nacional Colombiana: Bogota, Colombia, 2019. [Google Scholar]
- Salcedo-Gonzalez, M.; Suarez-Paez, J.; Esteve, M.; Gómez, J.A.; Palau, C.E. A novel method of spatiotemporal dynamic geo-visualization of criminal data, applied to command and control centers for public safety. ISPRS Int. J. Geo Inf. 2020, 9, 160. [Google Scholar] [CrossRef] [Green Version]
- Nicholson, W.B.; Wilms, I.; Bien, J.; Matteson, D.S. High dimensional forecasting via interpretable vector autoregression. J. Mach. Learn. Res. 2020, 21, 6690–6741. [Google Scholar]
- Simone Vazzoler, I.; Michailidis, G. Package ‘Sparsevar’ 2019. BugReports. Available online: http://github.com/svazzole/sparsevar (accessed on 29 February 2020).
- Alberts, D.S.; Hayes, R.E. Understanding Command and Control (the Future of Command and Control); CCRP Publications: Washington, DC, USA, 2006. [Google Scholar]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salcedo-Gonzalez, M.; Suarez-Paez, J.; Esteve, M.; Palau, C.E. Spatiotemporal Predictive Geo-Visualization of Criminal Activity for Application to Real-Time Systems for Crime Deterrence, Prevention and Control. ISPRS Int. J. Geo-Inf. 2023, 12, 291. https://doi.org/10.3390/ijgi12070291
Salcedo-Gonzalez M, Suarez-Paez J, Esteve M, Palau CE. Spatiotemporal Predictive Geo-Visualization of Criminal Activity for Application to Real-Time Systems for Crime Deterrence, Prevention and Control. ISPRS International Journal of Geo-Information. 2023; 12(7):291. https://doi.org/10.3390/ijgi12070291
Chicago/Turabian StyleSalcedo-Gonzalez, Mayra, Julio Suarez-Paez, Manuel Esteve, and Carlos Enrique Palau. 2023. "Spatiotemporal Predictive Geo-Visualization of Criminal Activity for Application to Real-Time Systems for Crime Deterrence, Prevention and Control" ISPRS International Journal of Geo-Information 12, no. 7: 291. https://doi.org/10.3390/ijgi12070291