


PMGCN: Progressive Multi-Graph Convolutional Network for Traffic Forecasting

Abstract
:1. Introduction
- We designed a model of a progressive multi-graph convolutional network containing a multi-matrix spatiotemporal attention module, a multi-graph convolutional module, and a multi-scale temporal convolutional module. This model can extract a more comprehensive spatiotemporal dependency and capture dynamic changes between nodes more accurately.
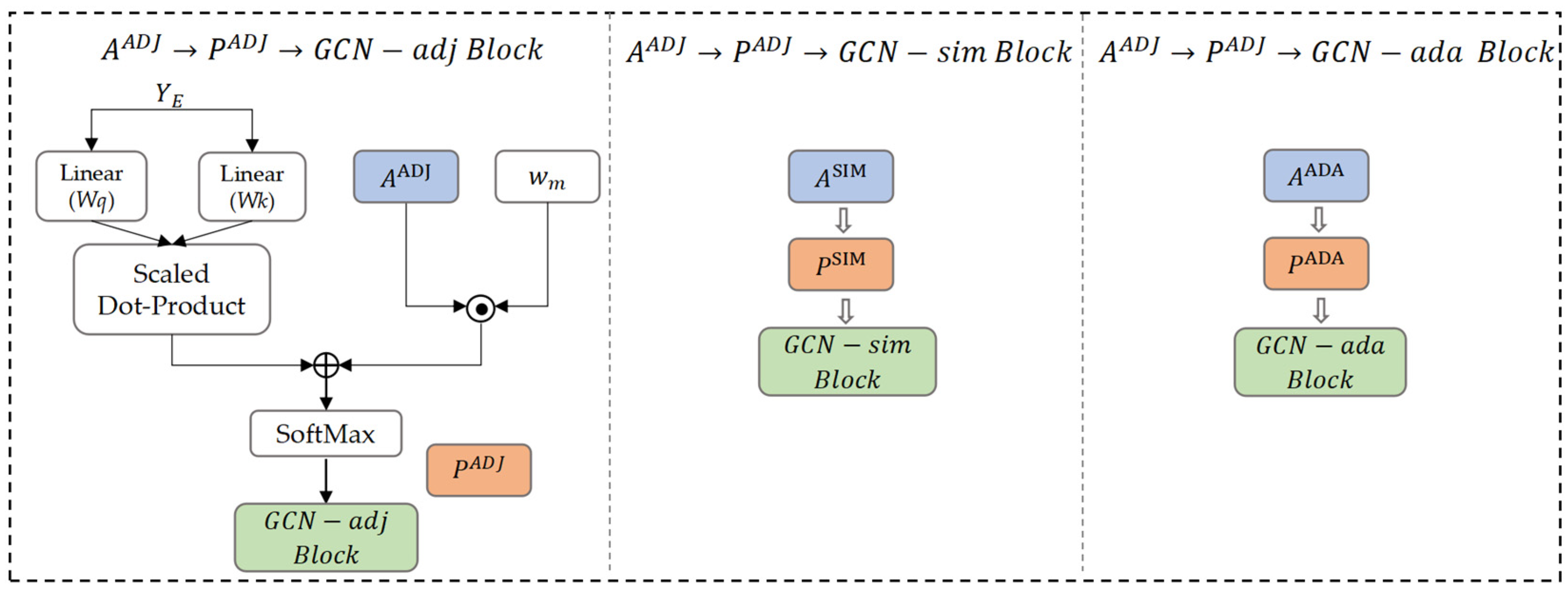
- We used a multi-matrix influence spatiotemporal attention by adaptively adjusting the spatial weights of the input of each order of the Chebyshev polynomial, which was used to dynamically extract the potential spatial correlation between traffic nodes. The distance matrix, similarity matrix, and adaptive matrix adjust the spatial weights from different angles. Among them, the adaptive matrix can be used to capture more comprehensive implied relationships. The spatiotemporal attention influenced by multiple matrices can enrich the ability of modeling spatiotemporal relationships, better capture spatiotemporal dependencies, and improve the prediction ability and prediction accuracy of the model.
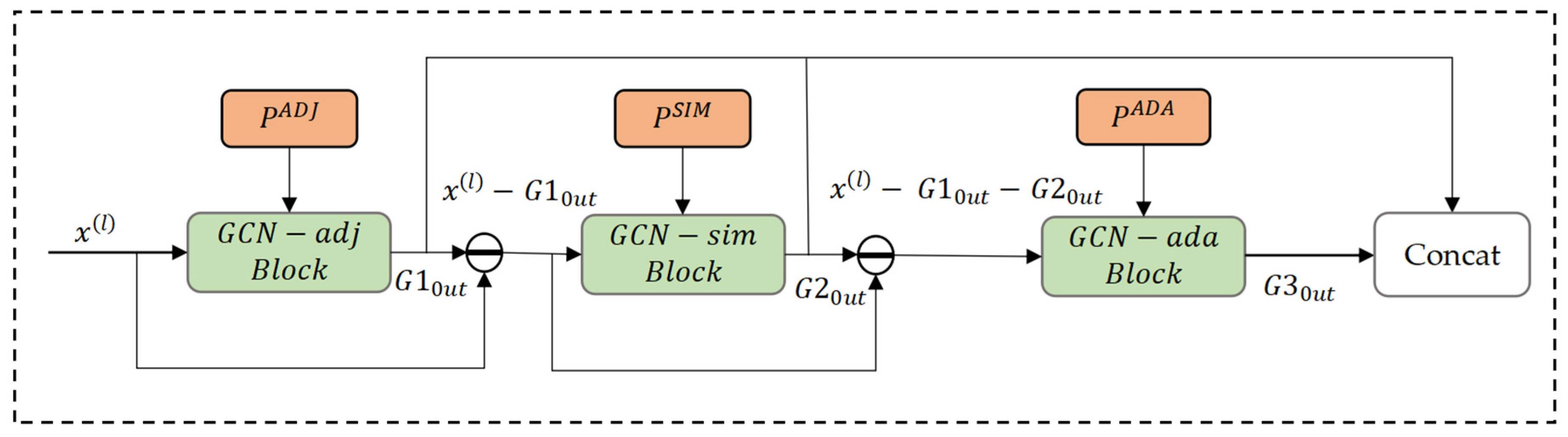
- We propose a progressive connection between GCN blocks, where each GCN block removes the hidden information mined by the current GCN block, and the next GCN block mines the hidden information not mined by the previous GCN block. The sequence of multi-graph structure mining of hidden information is a distance graph, similarity graph, adaptive graph, and step-by-step deep extraction of spatial correlation between nodes. Among them, the adjacency graph focuses on the spatial correlation between adjacent local regions, the similarity graph expands from the physical distance between points from a global perspective, and the adaptive graph in the multi-graph model can further extract some complex and irregular spatial relationships affected by various factors.
- To validate the effectiveness of the proposed model, extensive experiments were conducted using three real traffic datasets with two different traffic variables. The results show that the proposed method outperforms the existing methods.
2. Related Work
2.1. Graph Convolutional Neural Networks
2.2. Attention Mechanism
2.3. Traffic Forecasting
3. Preliminaries
3.1. Problem Formulation
3.2. Adjacency Matrices Construction
3.2.1. Distance Adjacency Matrix
3.2.2. Similar Adjacency Matrix
3.2.3. Adaptive Adjacency Matrix
4. Methodology
4.1. Model Framework
4.2. Spatiotemporal Block Model
4.2.1. Spatiotemporal Attention
4.2.2. Spatiotemporal Convolution
5. Experimental Studies
5.1. Experimental Data
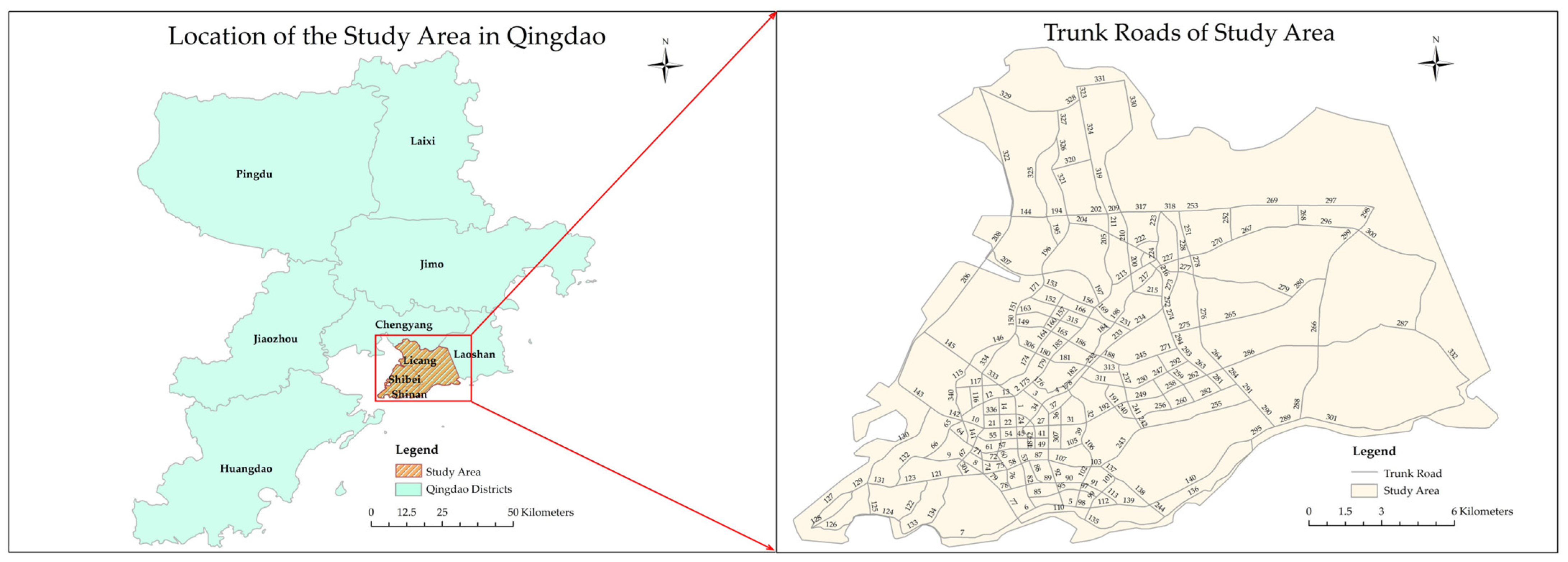
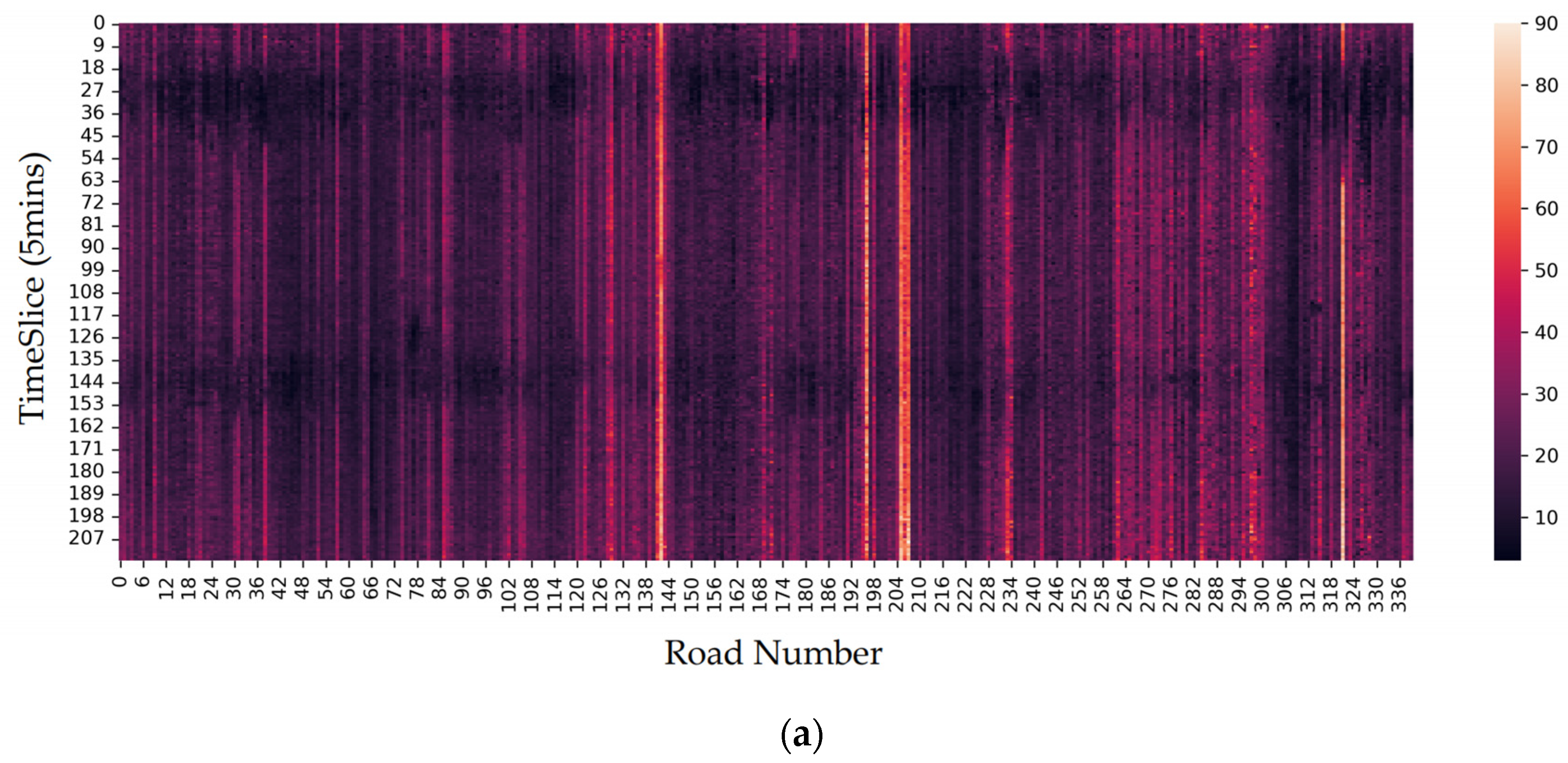
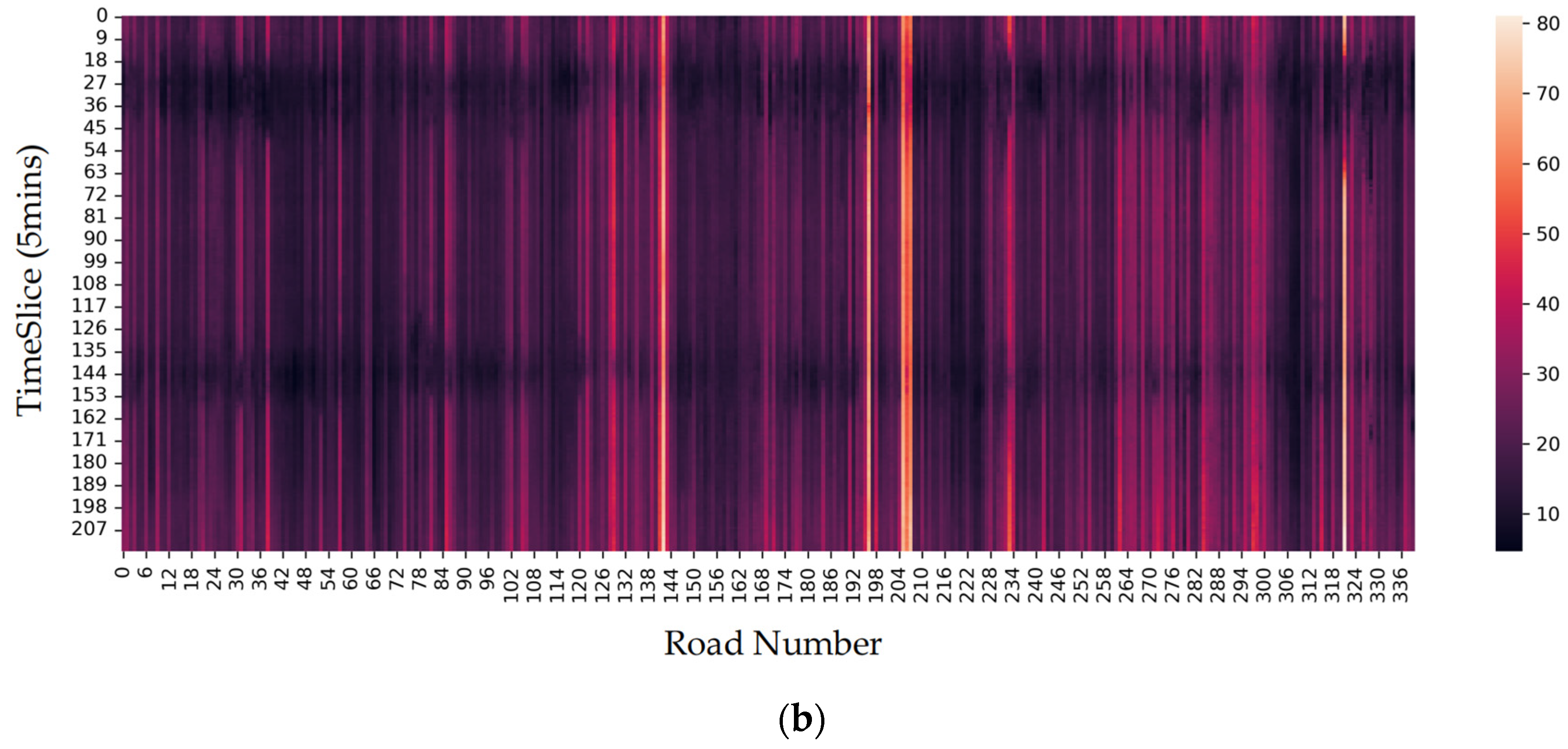
- Trunk roads: We selected the main road network of Licang District, Shibei District, Shinan District, and the southwestern part of Laoshan District of Qingdao. The network consists of 340 trunk roads. We numbered each trunk road, from 1 to 340.
- Traffic speed dataset: Real GPS data from Qingdao were used. These datasets were collected from the 340 main roads in Qingdao from 8 June 2020 to 26 July 2020. Table 1 presents the statistics in each row. The data contained taxi GPS records of the trunk roads. We reshaped the data into a time series by aggregating the average speed of the road network nodes every 5 min. In these datasets, each road network represents a node in the graph.
- Traffic flow dataset: We used two real California traffic flow datasets. The PeMSD4 dataset includes 307 sensors, and the data were sampled from 1 January to 28 February 2018. The PeMSD8 dataset includes 170 sensors, and the data were sampled from 1 July to 31 August 2016. Detailed statistics are shown in Table 1.
5.2. Experimental Setting
5.3. Baselines
- ARIMA: Autoregressive integrated moving average model [47];
- FC-LSTM: The model uses a recurrent neural network with fully connected LSTM hidden units [48];
- STGCN: Spatiotemporal graph convolutional network, using graph convolution and one-dimensional convolution [14];
- ASTGCN: Introduces a spatiotemporal attention mechanism into the model, an attention-based spatiotemporal graph convolutional network model [35];
- STSGCN: Spatiotemporal synchronous graph convolutional network, which utilizes local spatiotemporal subgraph modules to independently model local correlations, proposes a novel convolution operation to capture both spatial and temporal correlations [37];
- ASTGNN: Attention-based spatiotemporal graph neural networks, we design a trend-aware self-attention to extract temporal dynamics and develop dynamic graph convolutions [49];
- STGMN: Gated multi-graph attention spatiotemporal model, which uses multi-graph convolution and one-dimensional convolution for spatiotemporal extraction [50].
5.4. Main Results
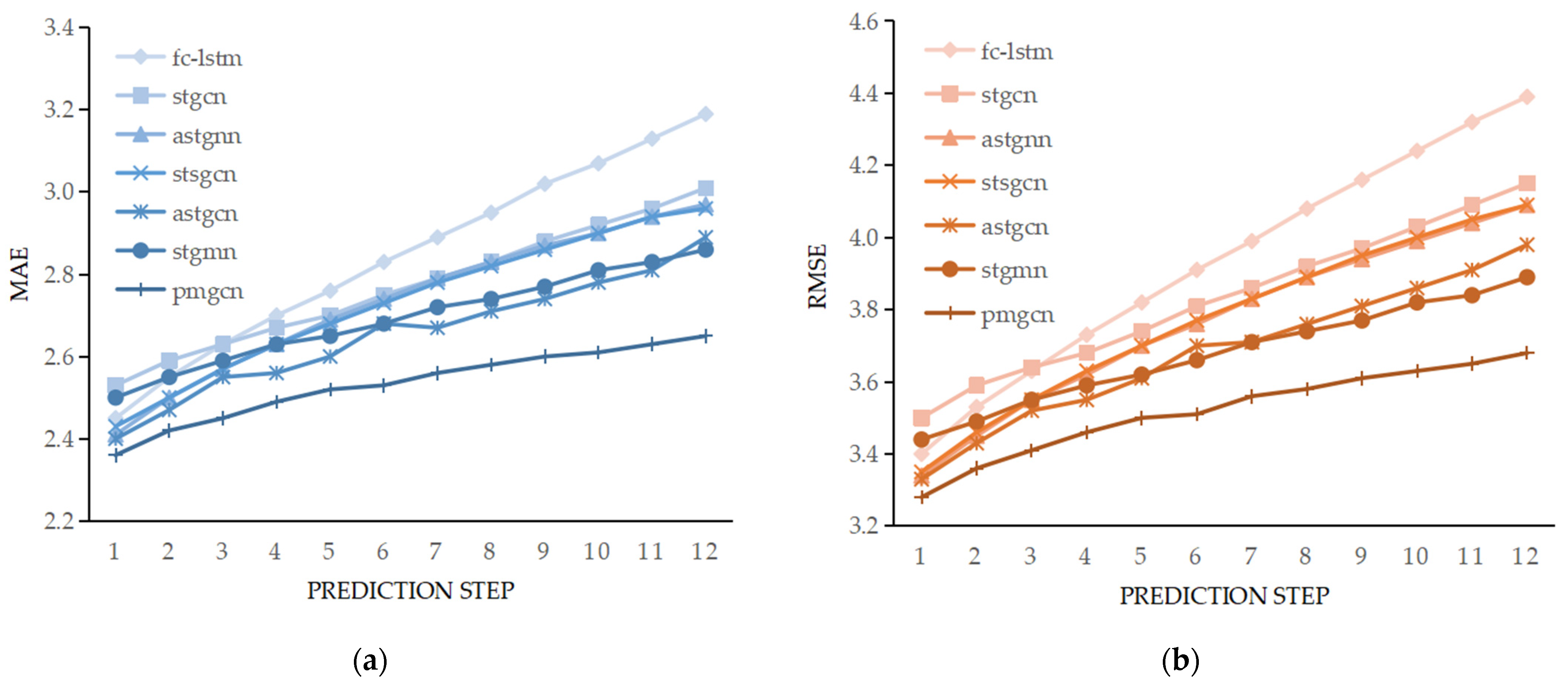
5.4.1. Different Models Prediction Performance
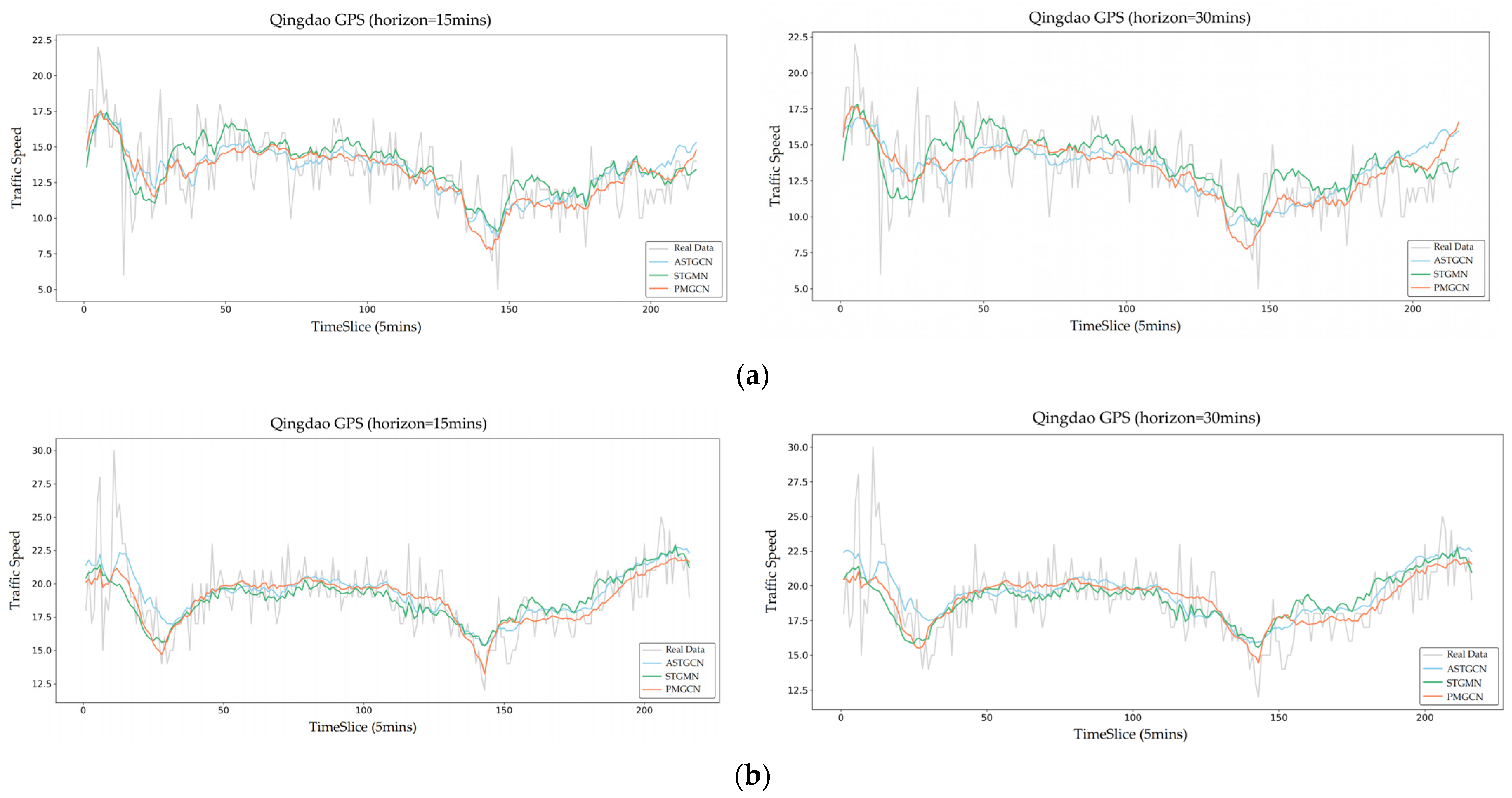
5.4.2. Analysis of Model Prediction Results
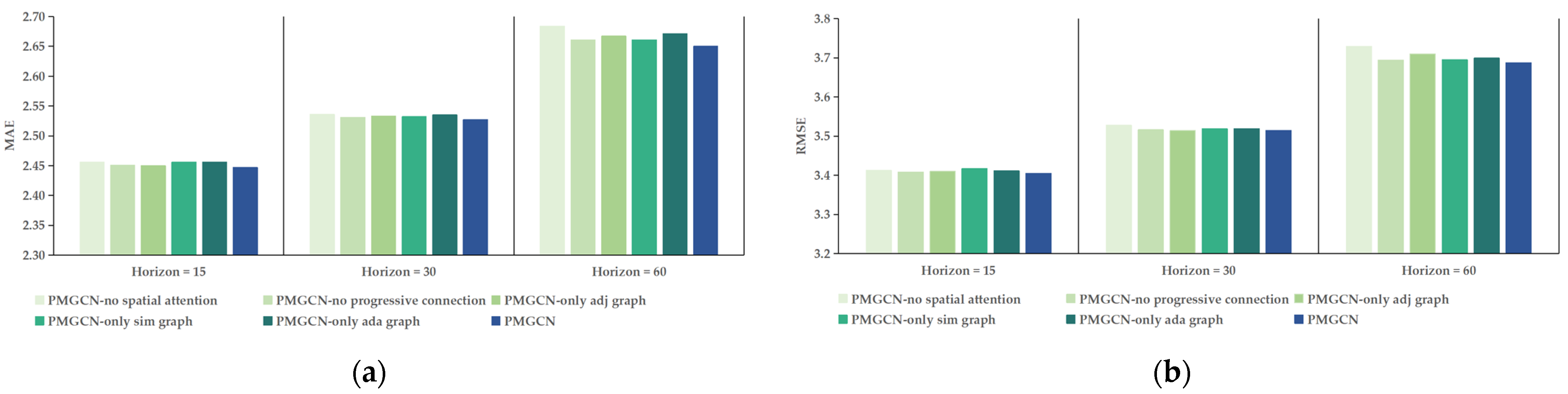
5.5. Ablation Study
- PMGCN-only adj graph: We used the distance graph only in space-time blocks;
- PMGCN-only sim graph: We used the similarity graph only in spatiotemporal blocks;
- PMGCN-only ada graph: We only used the adaptive graph in spatiotemporal blocks;
- PMGCN-no progressive connection: Only pure stacking was used, without progressive connection;
- PMGCN-no spatial attention: Lack of spatial attention layer dynamically adjusts each term in the graph convolution.
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gu, Y.; Deng, L. STAGCN: Spatial–Temporal Attention Graph Convolution Network for Traffic Forecasting. Mathematics 2022, 10, 1599. [Google Scholar] [CrossRef]
- Chen, Y.; Wu, G.; Chen, Y.; Xia, Z. Spatial location optimization of fire stations with traffic status and urban functional areas. Appl. Spat. Anal. Policy. 2023, 16, 771–788. [Google Scholar] [CrossRef]
- Wang, Y.; Tong, D.; Li, W.; Liu, Y. Optimizing the spatial relocation of hospitals to reduce urban traffic congestion: A case study of Beijing. Trans. GIS 2019, 23, 365–386. [Google Scholar] [CrossRef]
- Ding, Q.Y.; Wang, X.F.; Zhang, X.Y.; Sun, Z.Q. Forecasting Traffic Volume with Space-Time ARIMA Model. Adv. Mater. Res. 2011, 156–157, 979–983. [Google Scholar] [CrossRef]
- Wu, C.H.; Ho, J.M.; Lee, D.T. Travel-time prediction with support vector regression. IEEE Trans. Intell. Transp. Syst. 2004, 5, 276–281. [Google Scholar] [CrossRef] [Green Version]
- Cheng, S.; Lu, F.; Peng, P.; Wu, S. Short-term traffic forecasting: An adaptive ST-KNN model that considers spatial heterogeneity. Comput. Environ. Urban Syst. 2018, 71, 186–198. [Google Scholar] [CrossRef]
- Cheng, S.; Lu, F.; Peng, P.; Wu, S. A Spatiotemporal Multi-View-Based Learning Method for Short-Term Traffic Forecasting. ISPRS Int. J. Geo-Inf. 2018, 7, 218. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zheng, Y.; Qi, D.; Li, R.; Yi, X. DNN-based prediction model for spatio-temporal data. In Proceedings of the 24th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Burlingame, CA, USA, 31 October–3 November 2016; p. 92. [Google Scholar]
- Li, Y.; Shahabi, C. A brief overview of machine learning methods for short-term traffic forecasting and future directions. Sigspatial Spec. 2018, 10, 3–9. [Google Scholar] [CrossRef]
- Li, Z.; Xiong, G.; Chen, Y.; Lv, Y.; Hu, B.; Zhu, F.; Wang, F.-Y. A Hybrid Deep Learning Approach with GCN and LSTM for Traffic Flow Prediction. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference, ITSC 2019, Auckland, New Zealand, 27–30 October 2019; pp. 1929–1933. [Google Scholar]
- Huang, R.; Huang, C.; Liu, Y.; Dai, G.; Kong, W. LSGCN: Long Short-Term Traffic Prediction with Graph Convolutional Networks. In Proceedings of the 29th International Joint Conference on Artificial Intelligence, Yokohama, Japan, 7–15 January 2020; pp. 2355–2361. [Google Scholar]
- Wang, X.; Ma, Y.; Wang, Y.; Jin, W.; Wang, X.; Tang, J.; Jia, C.; Yu, J. Traffic Flow Prediction via Spatial Temporal Graph Neural Network. In Proceedings of the 29th World Wide Web Conference (WWW), Taipei, Taiwan, 20–24 April 2020; pp. 1082–1092. [Google Scholar]
- Atwood, J.; Towsley, D. Diffusion-Convolutional Neural Networks. In Proceedings of the 30th Conference on Neural Information Processing Systems (NIPS 2016), Barcelona, Spain, 5–10 December 2016. [Google Scholar]
- Yu, B.; Yin, H.; Zhu, Z. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting. arXiv 2017, arXiv:1709.04875. [Google Scholar]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Li, H. T-gcn: A temporal graph convolutional network for traffic prediction. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3848–3858. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Han, X.; Deng, H.; Tao, C.; Zhao, L.; Wang, P.; Lin, T.; Li, H. KST-GCN: A knowledge-driven spatial-temporal graph convolutional network for traffic forecasting. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15055–15065. [Google Scholar] [CrossRef]
- Lee, K.; Rhee, W. DDP-GCN: Multi-graph convolutional network for spatiotemporal traffic forecasting. Transp. Res. Part C Emerg. Technol. 2022, 134, 103466. [Google Scholar] [CrossRef]
- Bruna, J.; Zaremba, W.; Szlam, A.; LeCun, Y. Spectral networks and locally connected networks on graphs. arXiv 2013, arXiv:1312.6203. [Google Scholar]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering. Adv. Neural Inf. Process. Syst. 2016, 29, 3844–3852. [Google Scholar]
- Kipf, T.N.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. In Proceedings of the International Conference on Learning Representations (ICLR), Toulon, France, 24–26 April 2017. [Google Scholar]
- Micheli, A. Neural Network for Graphs: A Contextual Constructive Approach. IEEE Trans. Neural Netw. 2009, 20, 498–511. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, Q.; Tao, C.; Deng, H.; Zhao, L.; Li, H. AST-GCN: Attribute-augmented spatiotemporal graph convolutional network for traffic forecasting. IEEE Access 2021, 9, 35973–35983. [Google Scholar] [CrossRef]
- Zhang, K.; He, F.; Zhang, Z.; Lin, X.; Li, M. Graph Attention Temporal Convolutional Network for Traffic Speed Forecasting on Road Networks. Transp. B Transp. Dyn. 2021, 9, 153–171. [Google Scholar] [CrossRef]
- Yan, X.; Zheng, C.; Li, Z.; Wang, S.; Cui, S. Pointasnl: Robust point clouds processing using nonlocal neural networks with adaptive sampling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 5589–5598. [Google Scholar]
- Zhou, Y.; Li, J.; Chen, H.; Wu, Y.; Wu, J.; Chen, L. A spatiotemporal attention mechanism-based model for multi-step citywide passenger demand prediction. Inf. Sci. 2020, 513, 372–385. [Google Scholar] [CrossRef]
- Zheng, C.; Fan, X.; Wang, C.; Qi, J. Gman: A graph multi-attention network for traffic prediction. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 1234–1241. [Google Scholar]
- Liu, L.; Zhen, J.; Li, G.; Zhan, G.; He, Z.; Du, B.; Lin, L. Dynamic spatial-temporal representation learning for traffic flow prediction. IEEE Trans. Intell. Transp. Syst. 2020, 22, 7169–7183. [Google Scholar] [CrossRef]
- Williams, B.M.; Hoel, L.A. Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: Theoretical basis and empirical results. J. Transp. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef] [Green Version]
- Ahn, J.Y.; Ko, E.; Kim, E. Predicting spatiotemporal traffic flow based on support vector regression and Bayesian classifier. In Proceedings of the IEEE 5th International Conference on Big Data and Cloud Computing, Dalian, China, 26–28 August 2015; pp. 125–130. [Google Scholar]
- Ma, X.; Dai, Z.; He, Z.; Ma, J.; Wang, Y.; Wang, Y. Learning Traffic as Images: A Deep Convolutional Neural Network for Large-Scale Transportation Network Speed Prediction. Sensors 2017, 17, 818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, Z.; Chen, W.; Wu, X.; Chen, P.C.; Liu, J. LSTM network: A deep learning approach for short-term traffic forecast. IET Intell. Transp. Syst. 2017, 11, 68–75. [Google Scholar] [CrossRef] [Green Version]
- Devadhas Sujakumari, P.; Dassan, P. Generative Adversarial Networks (GAN) and HDFS-Based Realtime Traffic Forecasting System Using CCTV Surveillance. Symmetry 2023, 15, 779. [Google Scholar] [CrossRef]
- Zhang, Y.; Cheng, Q.; Liu, Y.; Liu, Z. Full-scale spatio-temporal traffic flow estimation for city-wide networks: A transfer learning based approach. Transp. B Transp. Dyn. 2022, 11, 1–27. [Google Scholar] [CrossRef]
- Zhang, Y.X.; Zhou, X.; Luo, J.; Zhang, Z.L. Urban Traffic Dynamics Prediction—A Continuous Spatial-temporal Meta-learning Approach. ACM Trans. Intell. Syst. Technol. 2022, 13, 1–19. [Google Scholar] [CrossRef]
- Guo, S.; Lin, Y.; Feng, N.; Song, C.; Wan, H. Attention based spatial-temporal graph convolutional networks for traffic flow forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January 2019; Volume 33, pp. 922–929. [Google Scholar]
- Wang, J.; Chen, Q.; Gong, H. STMAG: A spatial-temporal mixed attention graph-based convolution model for multi-data flow safety prediction. Inf. Sci. 2020, 525, 16–36. [Google Scholar] [CrossRef]
- Song, C.; Lin, Y.; Guo, S.; Wan, H. Spatial-temporal synchronous graph convolutional networks: A new framework for spatial-temporal network data forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 914–921. [Google Scholar]
- Zhang, W.; Zhu, K.; Zhang, S.; Chen, Q.; Xu, J. Dynamic graph convolutional networks based on spatiotemporal data embedding for traffic flow forecasting. Knowl. Based Syst. 2022, 250, 109028. [Google Scholar] [CrossRef]
- Vidal, E.; Rulot, H.M.; Casacuberta, F.; Benedi, J.M. On the use of a metric-space search algorithm (AESA) for fast DTW-based recognition of isolated words. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 651–660. [Google Scholar] [CrossRef]
- Povinelli, R.J.; Johnson, M.T.; Lindgren, A.C.; Ye, J. Time series classification using Gaussian mixture models of reconstructed phase spaces. IEEE Trans. Knowl. Data Eng. 2004, 16, 779–783. [Google Scholar] [CrossRef] [Green Version]
- Khaled, A.; Elsir, A.M.T.; Shen, Y. TFGAN: Traffic forecasting using generative adversarial network with multi-graph convolutional network. Knowl. Based Syst. 2022, 249, 108990. [Google Scholar] [CrossRef]
- He, R.; Ravula, A.; Kanagal, B.; Ainslie, J. Realformer: Transformer likes residual attention. arXiv 2020, arXiv:2012.11747. [Google Scholar]
- Lan, S.; Ma, Y.; Huang, W.; Wang, W.; Yang, H.; Li, P. DSTAGNN: Dynamic spatial-temporal aware graph neural network for traffic flow forecasting. In Proceedings of the International Conference on Machine Learning, ICML, Baltimore, MD, USA, 17–23 July 2022; pp. 11906–11917. [Google Scholar]
- Yang, S.; Li, H.; Luo, Y.; Li, J.; Song, Y.; Zhou, T. Spatiotemporal Adaptive Fusion Graph Network for Short-Term Traffic Flow Forecasting. Mathematics 2022, 10, 1594. [Google Scholar] [CrossRef]
- Li, M.; Zhu, Z. Spatial-Temporal Fusion Graph Neural Networks for Traffic Flow Forecasting. In Proceedings of the Thirty-Fifth AAAI Conference on Artificial Intelligence, Online, 2–9 February 2021; AAAI Press: Palo Alto, CA, USA, 2021; pp. 4189–4196. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient channel attention for deep convolutional neural networks. In Proceedings of the Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14 June 2020; pp. 11531–11539. [Google Scholar]
- Box, G.; Jenkins, G. Time Series Analysis: Forecasting and Control; Holden-Day: San Francisco, CA, USA, 1970. [Google Scholar]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to sequence learning with neural networks. Adv. Neural Inf. Process. Syst. 2014, 27, 3104–3112. [Google Scholar]
- Guo, S.; Lin, Y.; Wan, H.; Li, X.; Cong, G. Learning dynamics and heterogeneity of spatial-temporal graph data for traffic forecasting. IEEE Trans. Knowl. Data Eng. 2021, 34, 5415–5428. [Google Scholar] [CrossRef]
- Ni, Q.; Zhang, M. STGMN: A gated multi-graph convolutional network framework for traffic flow prediction. Appl. Intell. 2022, 52, 15026–15039. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Sensors | Time Interval | Period | Samples | The Selected Period Time of the Day |
|---|---|---|---|---|---|
| Qingdao GPS | 340 | 5 min | 8 June 2020–26 July 2020 | 10584 | 06:00–24:00 |
| PeMSD4 | 307 | 5 min | 1 January 2018–28 February 2018 | 16992 | 00:00–24:00 |
| PeMSD8 | 170 | 5 min | 1 July 2016–31 August 2016 | 17856 | 00:00–24:00 |
| Datasets | Horizon | Metrics | ARIMA | FC-LSTM | STGCN | ASTGNN | STSGCN | ASTGCN | STGMN | PMGCN |
|---|---|---|---|---|---|---|---|---|---|---|
| Qingdao GPS | H = 3 (15 min) | MAE | 2.71 | 2.63 | 2.63 | 2.57 | 2.57 | 2.55 | 2.59 | 2.45 |
| RMSE | 3.73 | 3.63 | 3.64 | 3.55 | 3.55 | 3.52 | 3.55 | 3.41 | ||
| MAPE (%) | 14.38 | 13.83 | 13.92 | 13.74 | 13.73 | 13.73 | 13.76 | 12.97 | ||
| H = 6 (30 min) | MAE | 2.92 | 2.83 | 2.75 | 2.74 | 2.73 | 2.68 | 2.68 | 2.53 | |
| RMSE | 4.03 | 3.91 | 3.81 | 3.76 | 3.77 | 3.70 | 3.66 | 3.51 | ||
| MAPE (%) | 15.68 | 15.07 | 14.71 | 14.84 | 14.76 | 14.65 | 14.24 | 13.59 | ||
| H = 12 (60 min) | MAE | 3.31 | 3.19 | 3.01 | 2.97 | 2.96 | 2.89 | 2.86 | 2.65 | |
| RMSE | 4.56 | 4.39 | 4.15 | 4.09 | 4.09 | 3.98 | 3.89 | 3.68 | ||
| MAPE (%) | 17.91 | 17.29 | 16.43 | 16.40 | 16.33 | 15.98 | 15.36 | 14.61 |
| Dataset | Metrics | PeMSD4 | PeMSD8 | ||||
|---|---|---|---|---|---|---|---|
| Horizon (15/30/60 min) | Horizon (15/30/60 min) | ||||||
| H = 3 | H = 6 | H = 12 | H = 3 | H = 6 | H = 12 | ||
| FC-LSTM | MAE | 21.46 | 25.37 | 34.00 | 17.32 | 20.67 | 28.21 |
| RMSE | 33.68 | 39.16 | 50.67 | 26.63 | 31.91 | 42.17 | |
| MAPE (%) | 14.49 | 17.21 | 23.68 | 11.25 | 13.21 | 18.41 | |
| STGCN | MAE | 21.56 | 23.86 | 27.87 | 21.32 | 22.56 | 26.32 |
| RMSE | 33.79 | 37.25 | 42.82 | 32.24 | 34.15 | 39.26 | |
| MAPE (%) | 14.72 | 11.63 | 16.96 | 14.23 | 14.77 | 17.11 | |
| ASTGCN | MAE | 19.70 | 21.55 | 26.00 | 16.44 | 18.42 | 22.50 |
| RMSE | 31.13 | 33.77 | 39.80 | 25.20 | 28.21 | 33.84 | |
| MAPE (%) | 13.14 | 14.31 | 16.98 | 11.03 | 11.62 | 13.89 | |
| STSGCN | MAE | 32.41 | 21.69 | 25.00 | 16.58 | 17.79 | 20.04 |
| RMSE | 20.12 | 34.74 | 39.42 | 25.56 | 27.74 | 31.15 | |
| MAPE (%) | 13.53 | 14.43 | 16.69 | 10.90 | 11.57 | 12.84 | |
| STGMN | MAE | 19.37 | 21.04 | 23.86 | 15.73 | 17.14 | 19.79 |
| RMSE | 31.01 | 33.58 | 37.68 | 24.14 | 26.48 | 30.37 | |
| MAPE (%) | 12.70 | 13.69 | 15.66 | 9.63 | 10.46 | 12.07 | |
| PMGCN | MAE | 18.27 | 19.24 | 21.38 | 13.88 | 15.85 | 17.85 |
| RMSE | 29.46 | 31.15 | 34.37 | 21.47 | 25.05 | 28.16 | |
| MAPE (%) | 12.21 | 12.71 | 13.97 | 9.23 | 10.13 | 11.31 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Han, Y.; Xu, Z.; Zhang, Z.; Sun, Z.; Chen, G. PMGCN: Progressive Multi-Graph Convolutional Network for Traffic Forecasting. ISPRS Int. J. Geo-Inf. 2023, 12, 241. https://doi.org/10.3390/ijgi12060241
Li Z, Han Y, Xu Z, Zhang Z, Sun Z, Chen G. PMGCN: Progressive Multi-Graph Convolutional Network for Traffic Forecasting. ISPRS International Journal of Geo-Information. 2023; 12(6):241. https://doi.org/10.3390/ijgi12060241
Chicago/Turabian StyleLi, Zhenxin, Yong Han, Zhenyu Xu, Zhihao Zhang, Zhixian Sun, and Ge Chen. 2023. "PMGCN: Progressive Multi-Graph Convolutional Network for Traffic Forecasting" ISPRS International Journal of Geo-Information 12, no. 6: 241. https://doi.org/10.3390/ijgi12060241