1. Introduction
The tremendous development of electric transportation, such as electric vehicles and more electrical aircraft, drives innovation for power electronic converters. These new applications require better performance, in terms of weight, volume, cost, losses, failure rate, and development time [
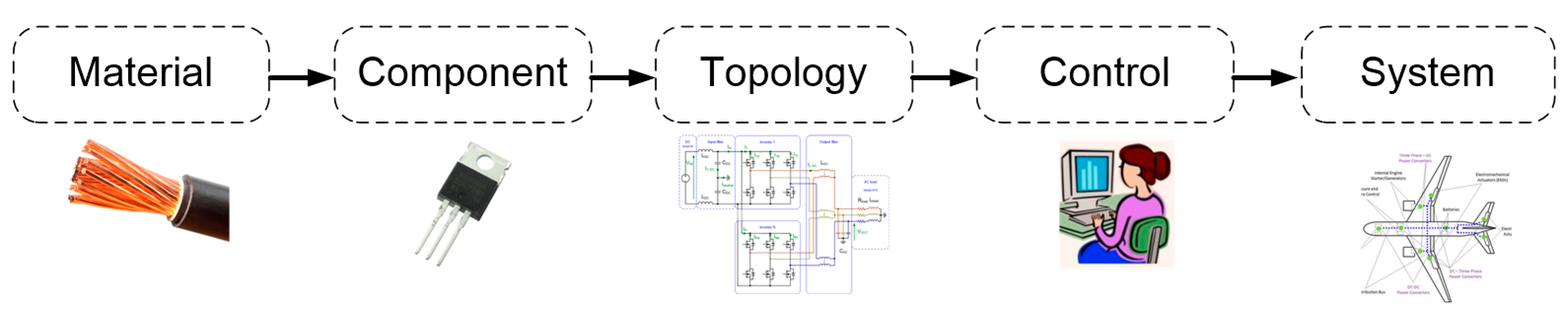
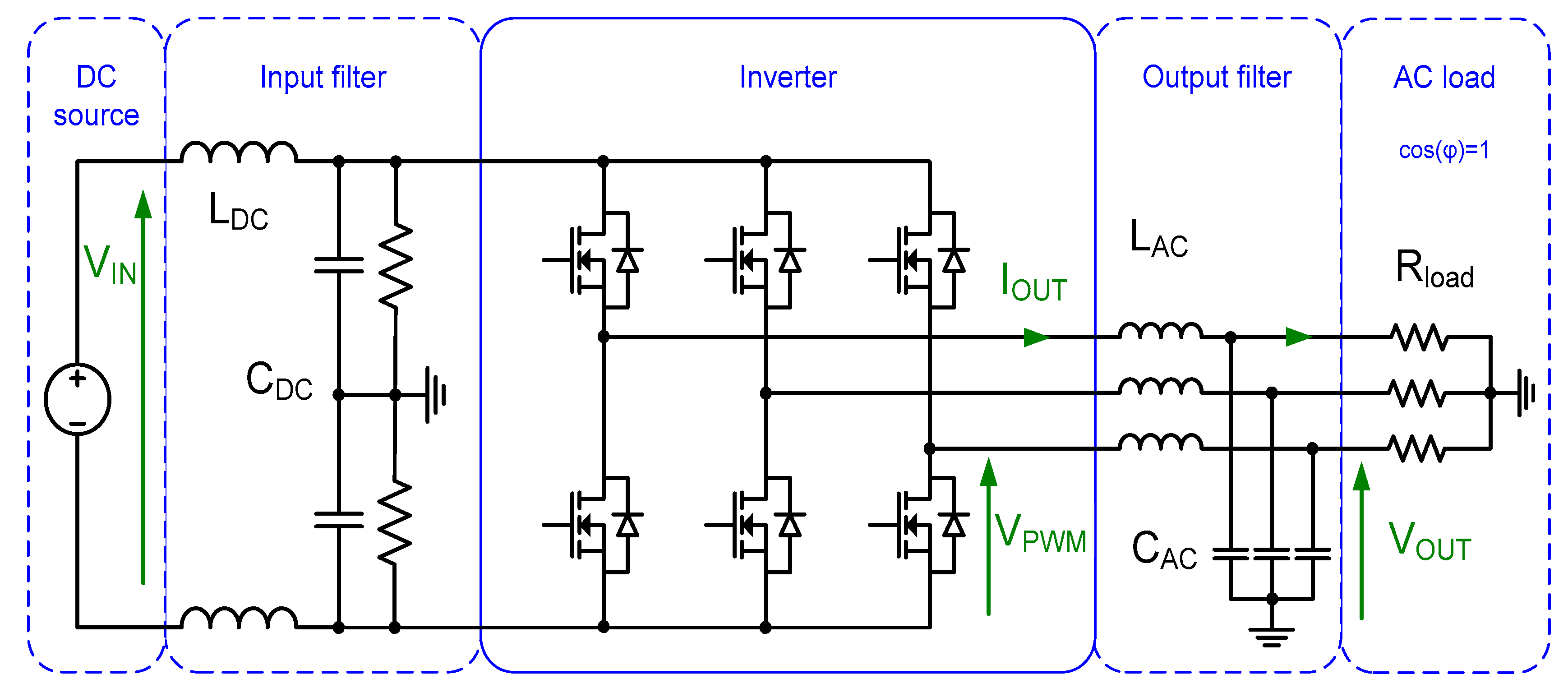
1]. Many performance indices can be currently improved thanks to technological breakthroughs, especially on active devices. However, the performance of a converter results from a global trade-off among devices, topology, and control, in strong interaction with the system requirements (
Figure 1). A sequential approach in the design may, therefore, lead to sub-optimal results, because a global optimum is not simply the sum of subsystem optima [
2]. For example, the switching frequency has an opposite impact on the sizing of the semi-conductors and on the design of a low-frequency filter. Solving all trade-offs simultaneously is the role of a power electronics expert, but the space of solutions is so wide that optimization tools can really be helpful to compare fairly candidate solutions or technologies.
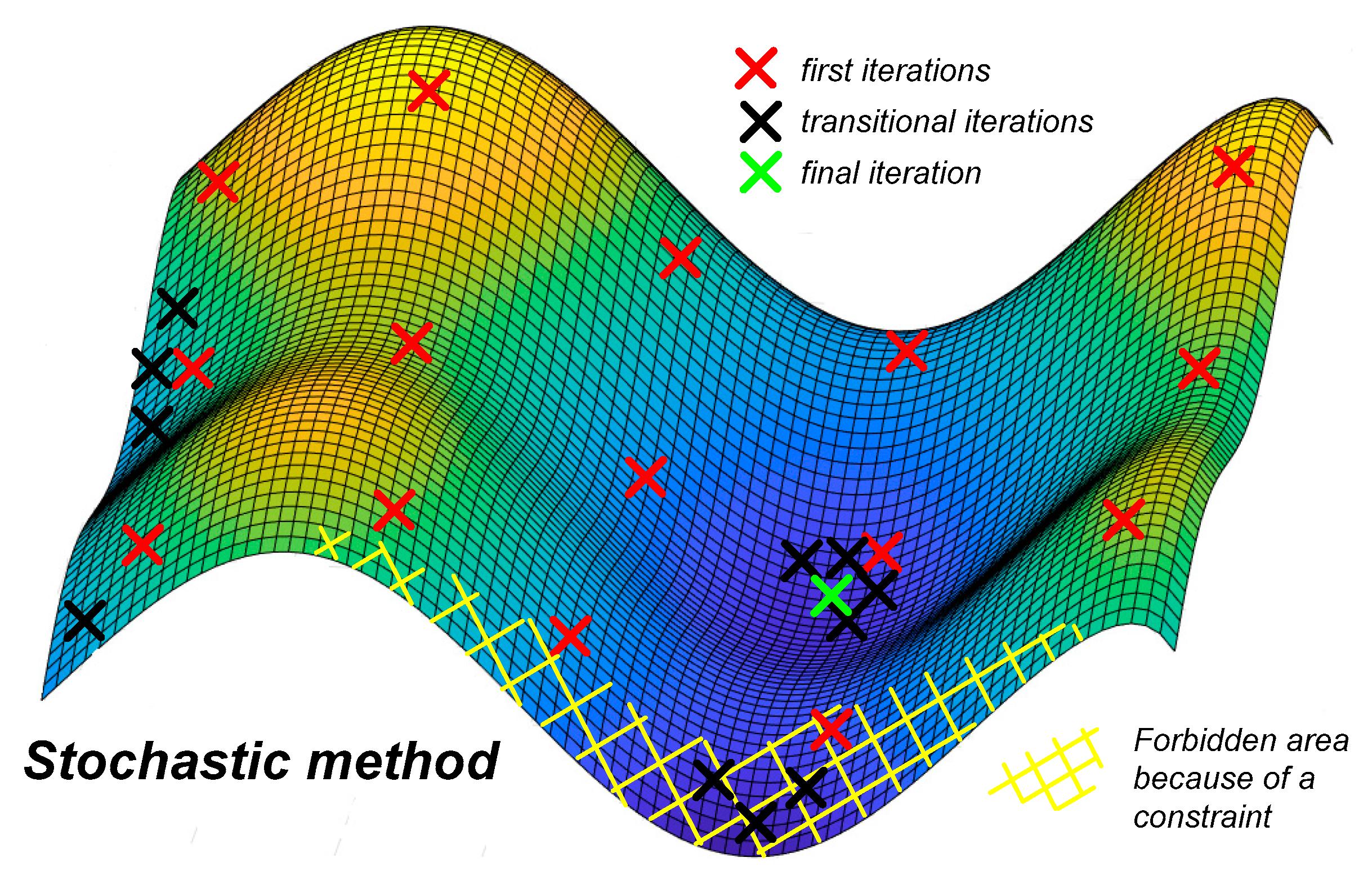
Many works already dealt with design tools for pulse width modulation (PWM) inverters with optimization methods. Several of them used stochastic methods, as illustrated by
Figure 2. In Reference [
3], the NSGA II algorithm (Non-dominated Sorting Genetic Algorithm II) [
4] was used to choose the best topology and size an inverter realized with power module technology. A design space analysis was refined in Reference [
5] to size an output filter of a 10-kW converter. Reference [
6] minimized an LCL (inductor-capacitor-inductor) filter using stochastic methods coupled with circuit and finite elements method (FEM) simulations. In Reference [
7], a method was used to reduce the number of potential design combinations by 99%, to achieve a reasonable computing time. A computer-aided EMI (ElectroMagnetic Interference) filter design procedure applied to PWM inverters was introduced in Reference [
8], with a sequential approach.
The use of precise models, such as FEM or time simulations included in an optimization algorithm, can give very accurate results, but usually results in the need for a lot of computation time, while it may not be able to handle many constraints.
These limitations are a real drawback in the first steps of a project, when the specifications often change and when preliminary results are quickly required. Often, the expertise of the engineer is the only way to take the first decisions.
Deterministic or gradient-based algorithms are very powerful to explore wide spaces of solutions with a large number of constraints in a small amount of time. This is the reason why they are a good alternative to stochastic algorithms in the pre-design step of a project, to help the designer in quickly exploring a wide range of solutions. It was demonstrated in Reference [
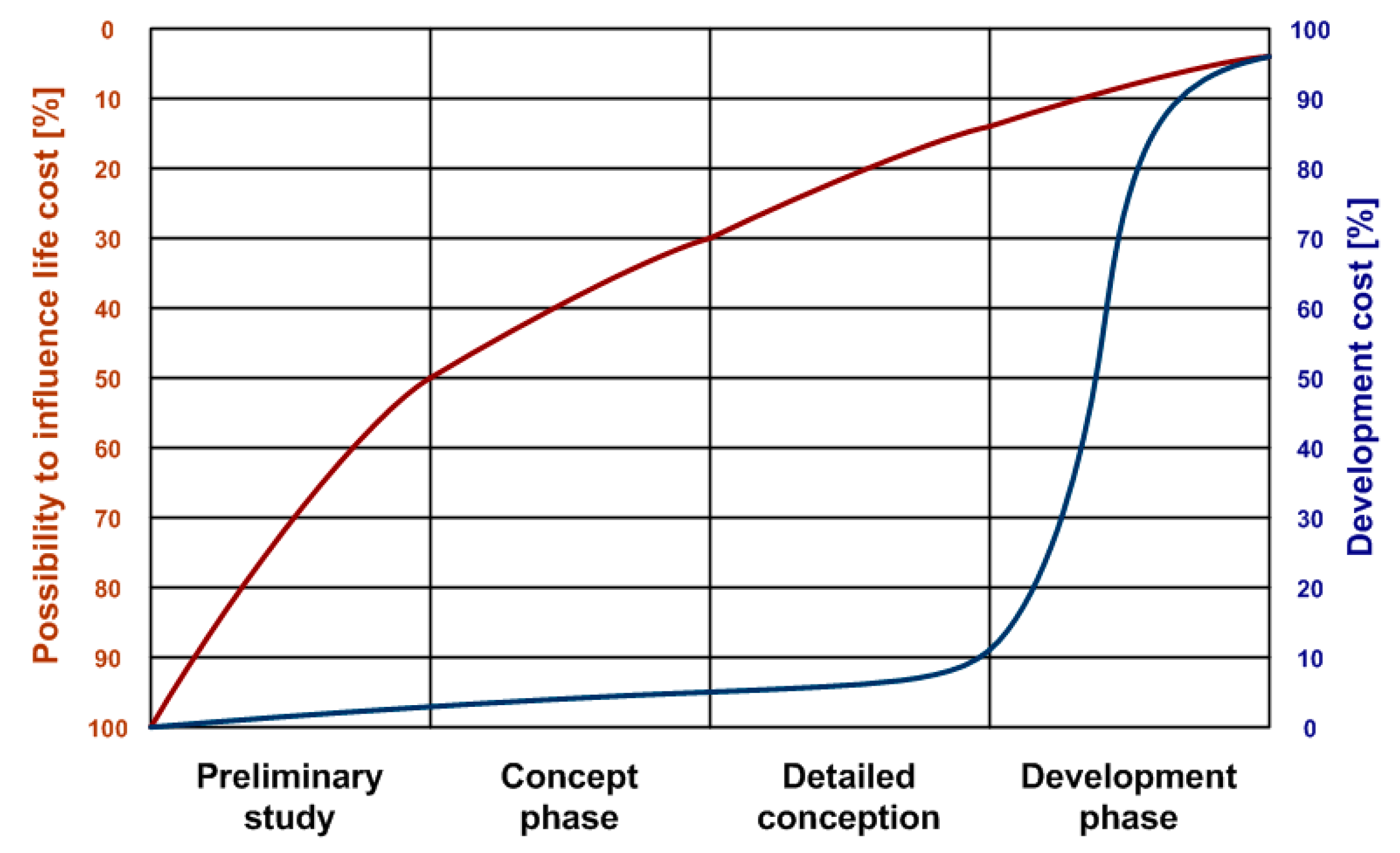
9] how relevant it is to take good decisions in the preliminary study phase (
Figure 3). The brown axis indicates that, at the beginning of the project, everything can influence life cost. However, after the preliminary phase, many decisions are taken (constraints and topology choice) which decrease the size of the solution space (halved according to Reference [
9]).
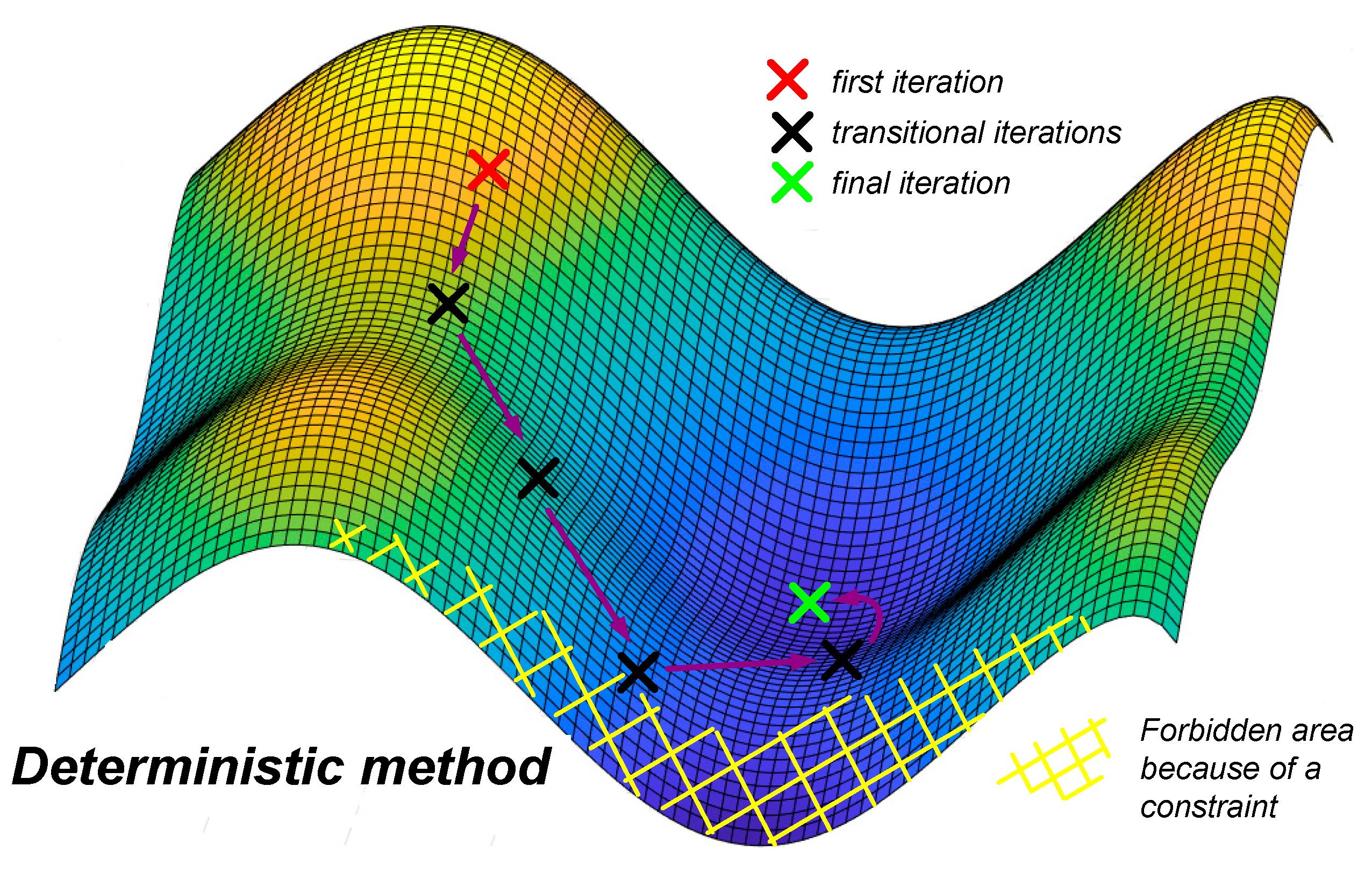
Figure 4 illustrates an optimization process using a deterministic algorithm. Computing the gradients of the system allows the algorithm to converge quickly to the optimal solution, easily avoiding spaces where constraints are not respected. It is a significant advantage compared to stochastic algorithms, because many constraints guide the design of power electronic converters. Furthermore, deterministic algorithms can handle more variables than stochastic ones. The alternative is to provide derivable models for all phenomena involved in the converter design. Since a possible drawback of gradient-based algorithms is to be stuck in local optima, a multi-start process can be added to the optimization strategy, in order to automatically change the optimization starting point, if the result is sensitive to the initial conditions.
Stochastic algorithms can also be used to obtain optimization results. The advantage is that they are compatible with any kind of model formulation (i.e., they do not need to be derivable); therefore, precise models such as time domain simulations and finite elements can be used. However, processing time and potential convergence difficulties are to be expected, especially in a wide space of solutions, where parameters can take multiple values. Indeed, stochastic algorithms have difficulties taking into account a large number of constraints. These stochastic algorithms may be used in the final design steps, rather than in the pre-design step. Each algorithm should be used during the appropriate stage of the project.
The design process is developed under a dedicated optimization framework [
10], which is able to automatically differentiate the equations. Automatic code differentiation is a real advantage for deterministic optimization because it enables the algorithm to easily converge to the optimal solution. Since many parameters are discrete and, thus, non-derivable, we propose a projection in a so-called “imaginary space”, which is fully continuous [
11]. The turn number of a winding is, therefore, not an integer, while all values of capacitance can be reached even if they are not available in a catalog. The optimization result is, thus, a kind of theoretical optimum, which is often sufficient in the pre-sizing step of a project [
11], and which allows fairly and quickly comparing two solutions.
Having a mathematical mapping of the space of solution allows analyzing the impact of the variables on the design. As the models are continuous, it is possible to plot sensitivity curves showing, for example, the impact of an input variable on several output variables. For example, the designer can understand which constraint is limiting in the design and maybe investigate solutions to overcome this constraint.
In this paper, it is illustrated how to use gradient-based algorithms, using the example of a PWM voltage source inverter. The aircraft objective is to minimize the converter weight. The system level and technological constraints on the devices are considered. The models used for the optimization are briefly presented, and the results are discussed. Experimental validations of the optimization result are also presented.
3. Optimization Result
3.1. Comparison of Different Solutions
The objective function was to minimize the converter weight, considering all system and device constraints. There was no priority management for the constraints. During the resolution, each constraint has to be respected. If this is not possible, the algorithm indicates which parameters were set to the limit values, helping the designer to relax some constraints.
Three main optimizations were carried out, with the same requirements given in
Table 1 and
Table 2. The first used an inductor made with a powder core, whereas the second used an inductor made with a ferrite core. Finally, the last optimization used a powder core, but with additional empirical constraints, according to some traditional “expert rules” that engineers could follow in the design of this inductor. These additional constraints included a limitation of the permeability drop at 80% of the nominal value (20% drop allowed), as well as a limitation of 20% of the current ripple in the inductor. The empirical constrained solution can be seen as the initial converter of this study. Global optimization takes into account the advantages and drawbacks of allowing variable saturation and AC current ripple in order to find a better solution.
Optimization was carried out with different efficiency targets, always with the aim of minimizing the weight.
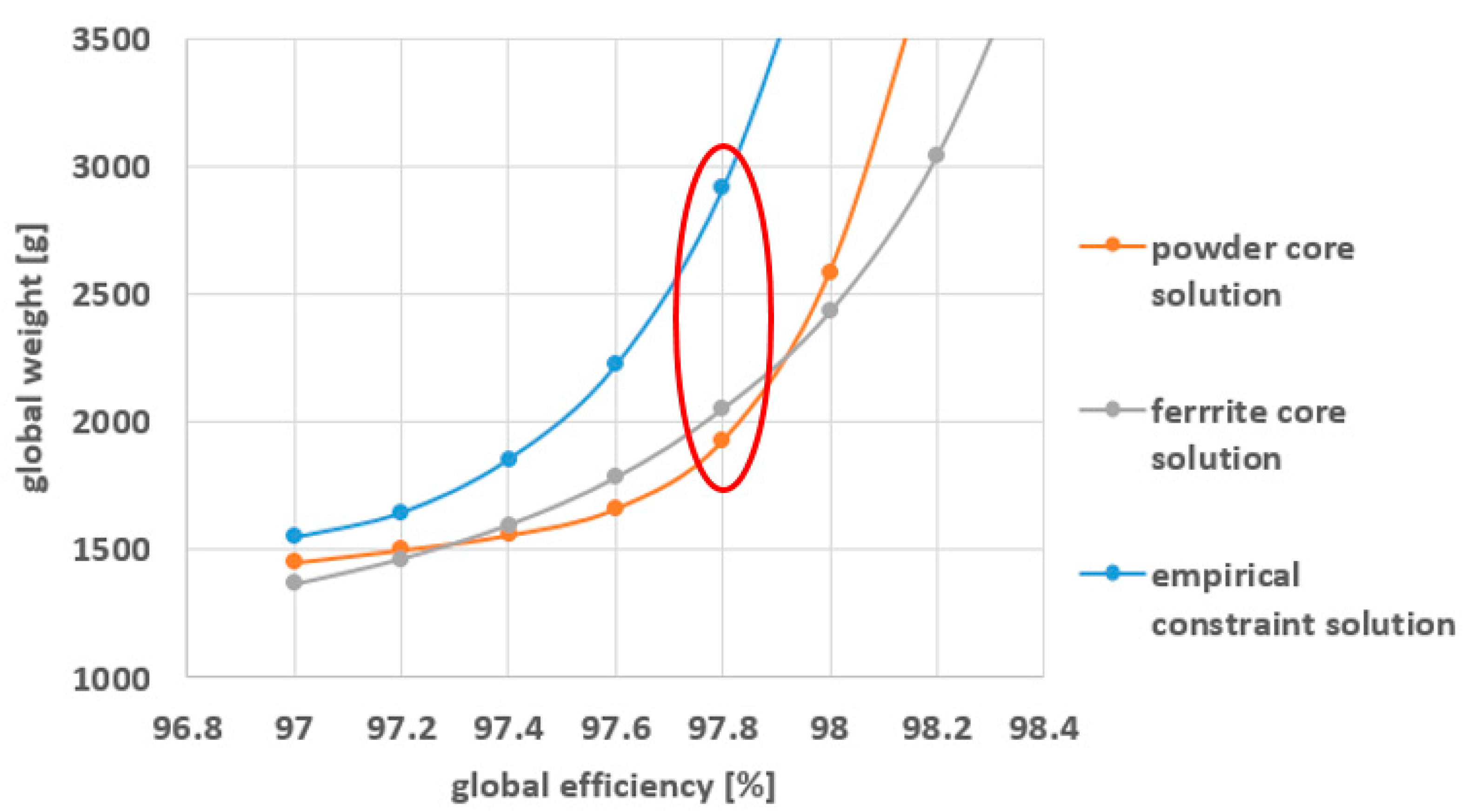
Figure 9 shows the weight-efficiency Pareto fronts for the three study cases. Solutions exist for lower and higher efficiencies, even if not displayed to keep balanced boundaries for the graphic.
The empirical constraint solutions were heavier than the others. This means that constraining the space of solutions with traditional rules was, in this case, inefficient to achieve an optimal design. Allowing a significant drop in permeability (higher than the usual 20%) with high current ripple would be useful in the design of a powder core inductor.
The weight repartition was similar for the three solutions.
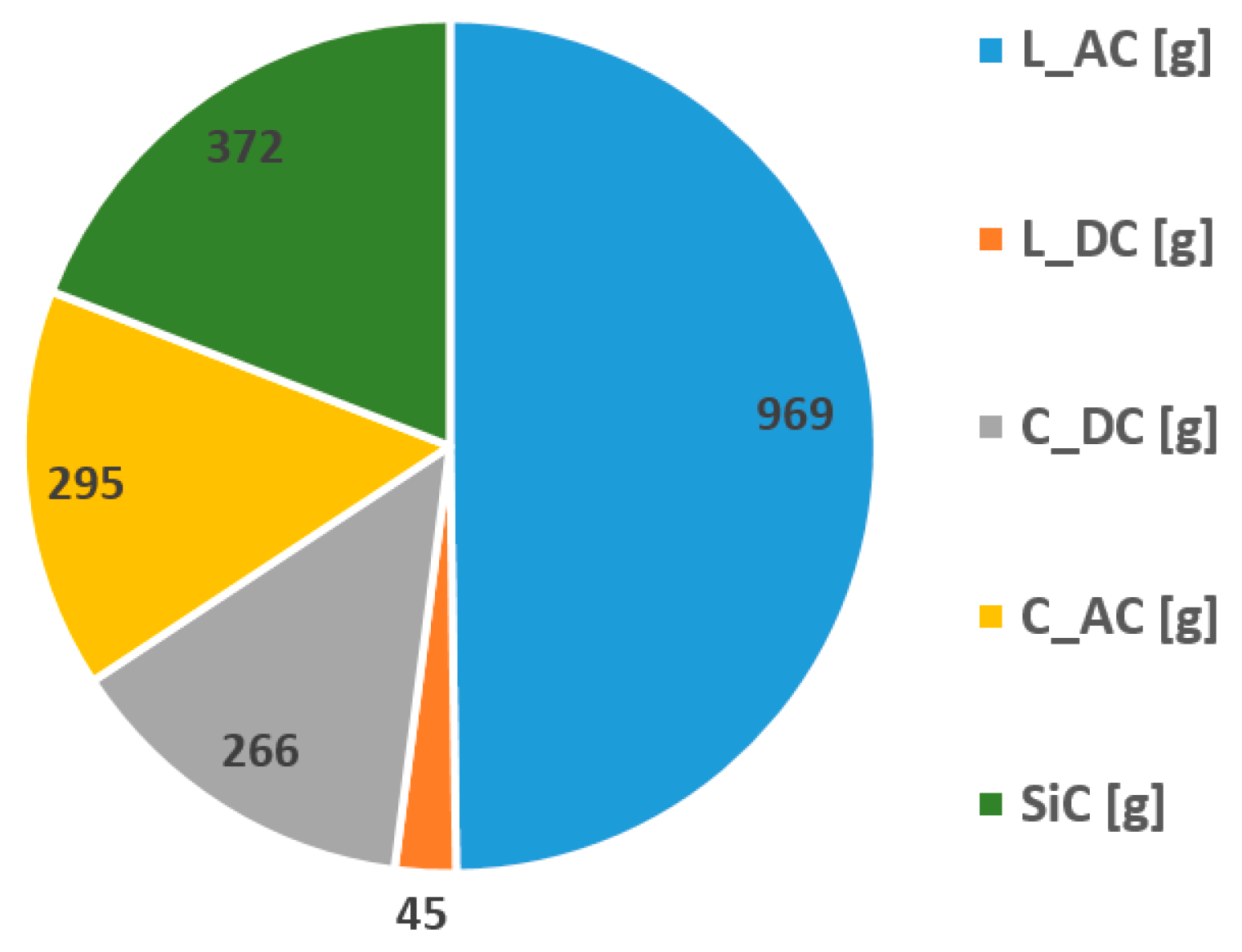
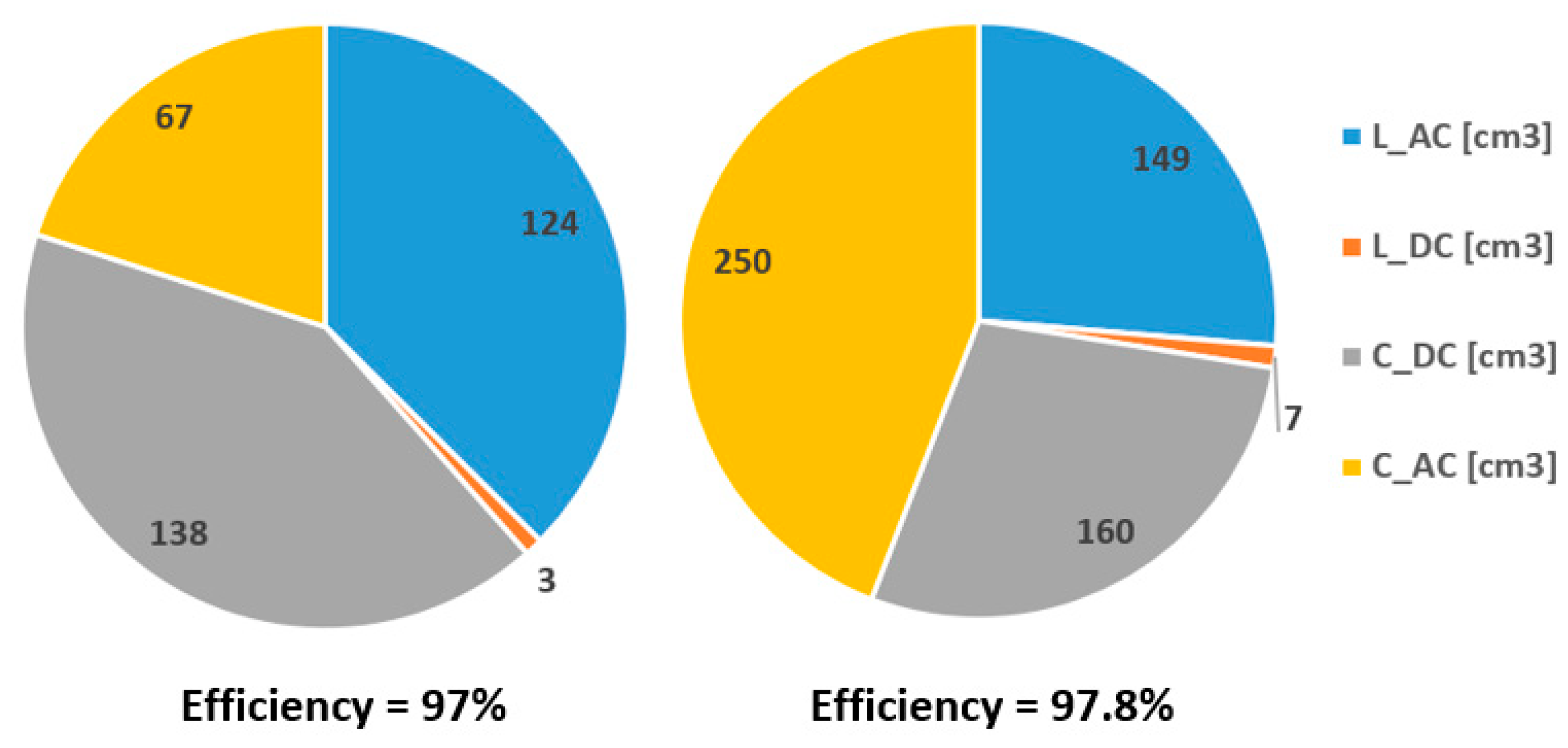
Figure 10 gives the weight distribution for the powder core solution at 97.8% efficiency. Inductor weight was computed using core and conductor weight, while capacitor weight used continuous interpolation of datasheets. The semiconductor weight was considered constant, since it is mainly a function of the package and almost independent of the die area. Obviously, in higher power, the package may be affected (several paralleled modules), but this was not necessary in this study.
It is clear that the AC inductor represented almost two-third of the global weight.
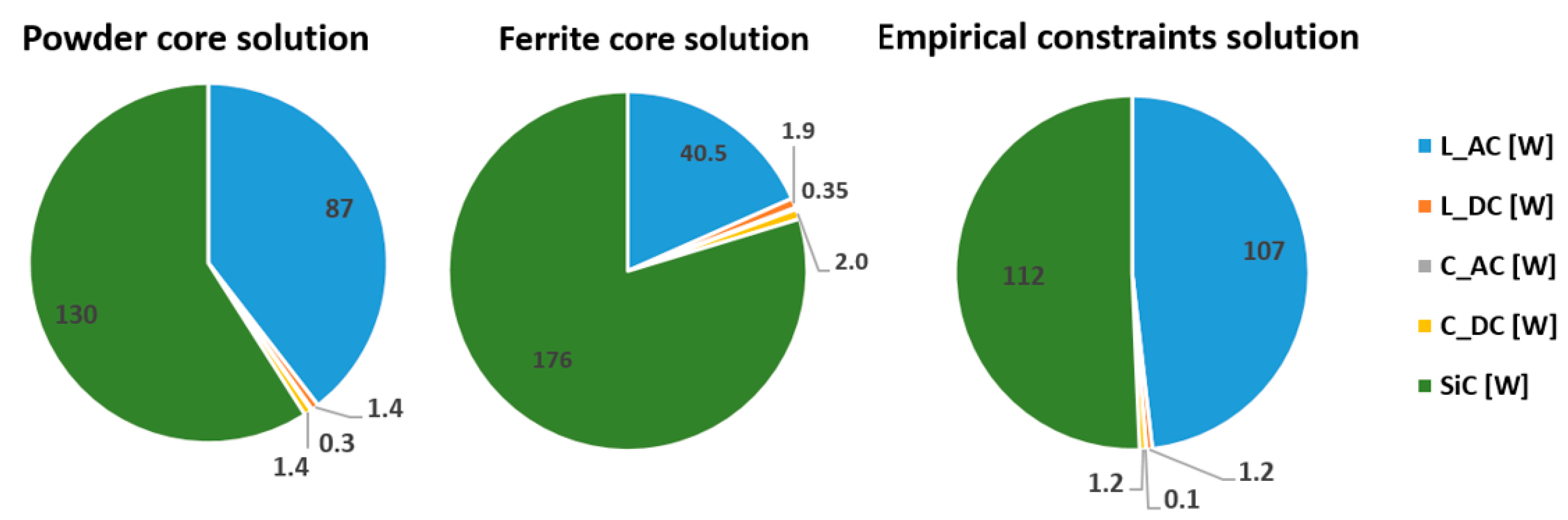
The powder core solution and the ferrite core solution gave similar results in terms of weight and efficiency. However, the details in the design were significantly different. The differences appeared in the choice of the optimal switching frequency and in the repartition of the loss to achieve 97.8% efficiency. The switching frequency was chosen at 52 kHz for the powder core solution, at 79 kHz for the ferrite core solution, and at 54 kHz for the empirical constraint solution. The distribution of losses is given in
Figure 11. On the three charts, the sum of each loss contribution was equal to 220 W, according to the chosen efficiency point.
The main constraint in the design of a powder core inductor is the core losses, whereas it is saturation for the ferrite core inductor. This is why the powder core inductor had more losses than the ferrite core inductor. As the ferrite core inductor had fewer losses, the algorithm was able to increase the switching frequency to decrease the size of the LC filter. Increasing the switching frequency was possible because the increase in switching losses in the MOSFET was balanced by the decrease in core losses compared to the powder core design.
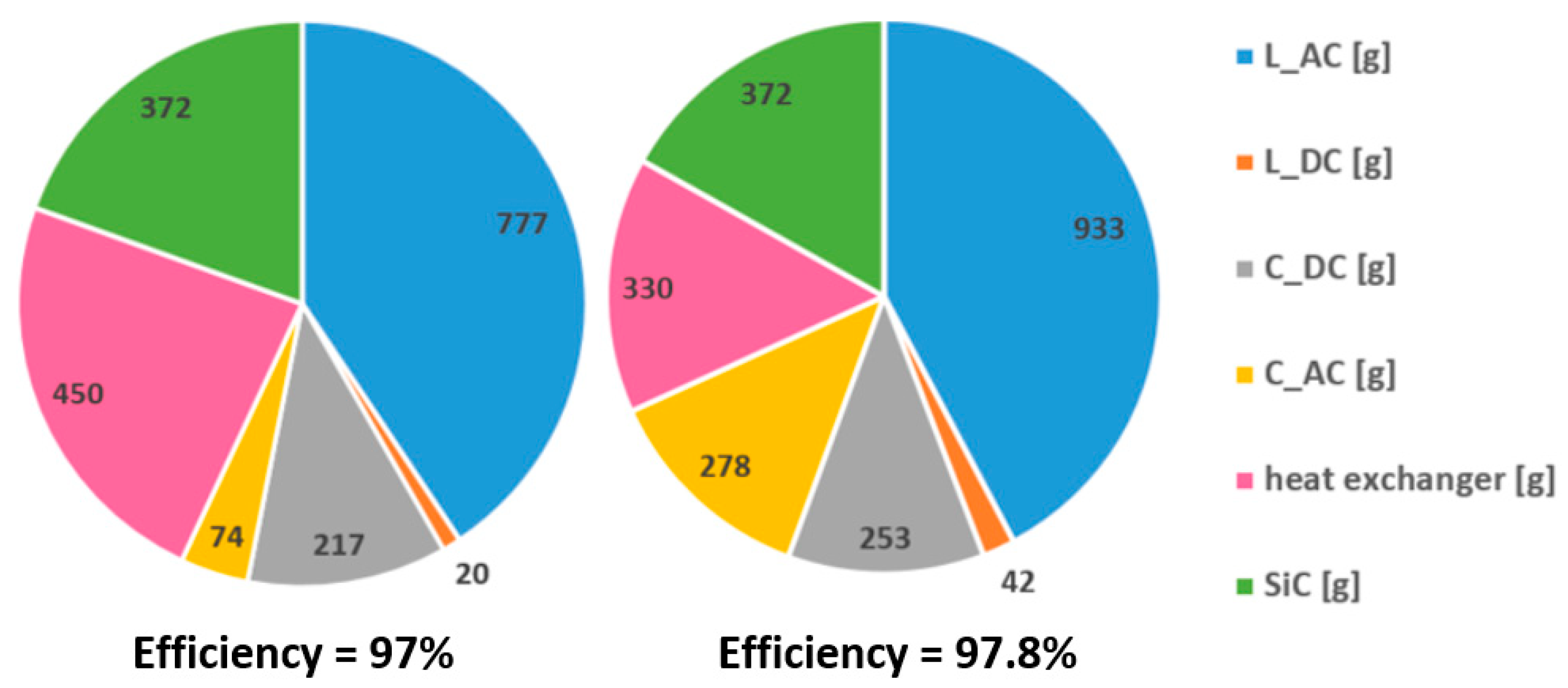
Other optimizations were carried considering the weight of the exchanger varying with the amount of loss to evacuate. A typical ratio of 1.5 kg of heat exchanger per 1 kW of loss was added, which is commonly used in aircraft systems [
26]. The optimal weight distribution is shown in
Figure 12 for two efficiency constraints.
Adding the heat exchanger weight penalized converters with a low-efficiency specification. The weight distribution in the converter with 97.8% was slightly different in comparison to
Figure 10, because of the impact of the switching frequency on both active and passive components, which justifies the need for global optimization.
The component volumes, related to the two optimal points given in
Figure 12, are shown in
Figure 13. Compared to the weight charts, capacitors took a larger portion than the AC inductor, which is normal due to density differences. If the designer wants to minimize the volume instead of the weight, which is particularly useful in an automotive application, the design should be very different.
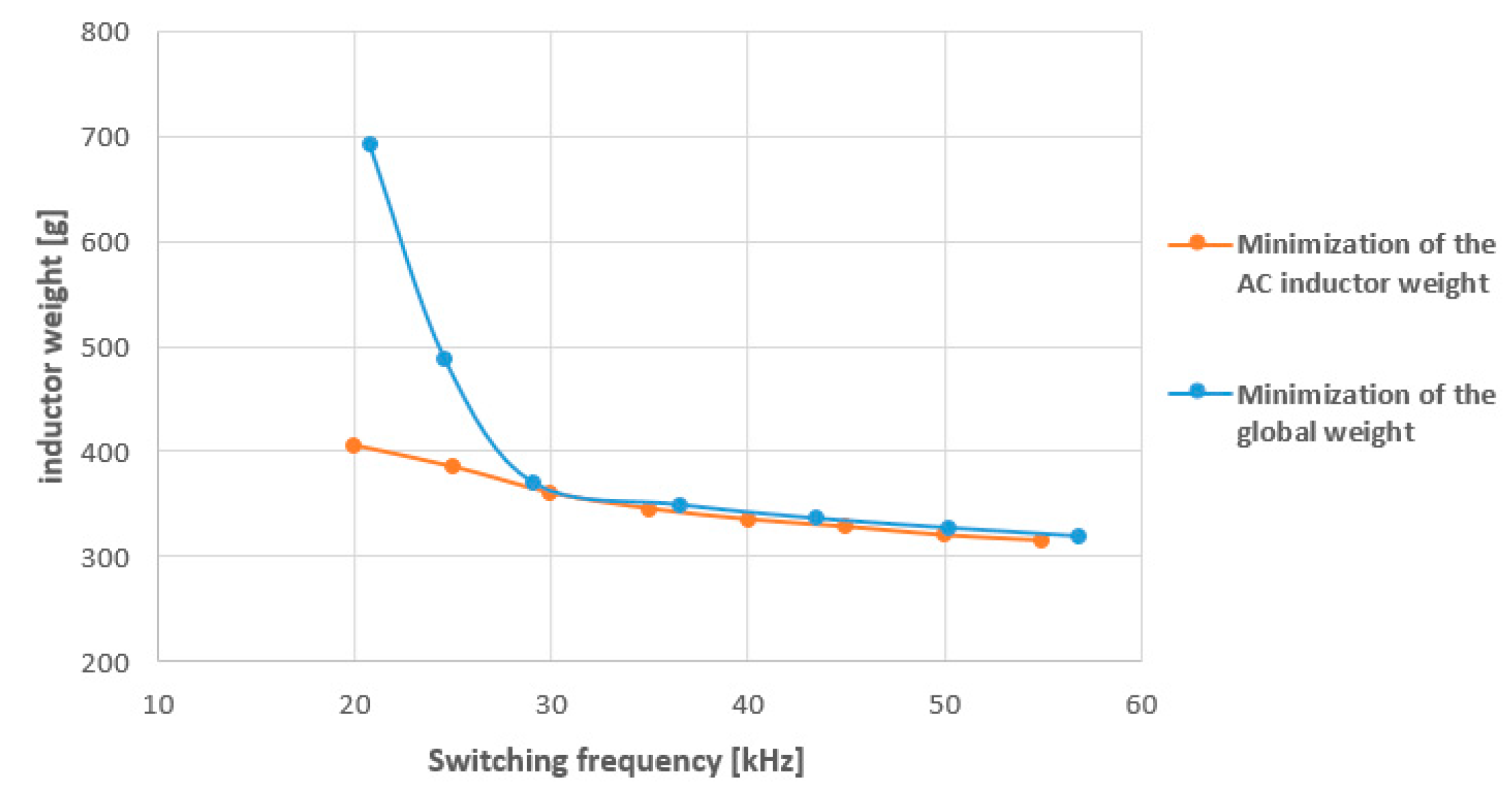
The design of the chosen example was very sensitive to the AC inductor. In this context, it would be possible to use a sequential design methodology, whereby the inductor is designed first, followed by the remaining components. However, this sequential methodology does not result always in the best converter, as illustrated hereafter. An AC inductor, optimized separately, was compared to the AC inductor optimized with the converter for different switching frequencies in
Figure 14.
For high frequencies, the local inductor optimization was equivalent to the global design, because the inductor became the very constraining point. For low frequencies (high efficiencies), the two designs were different. This difference can be explained by two reasons:
When high efficiency is required, the AC current ripple should decrease to get lower losses. This is achieved by increasing the AC inductor value and, consequently, its weight.
For lower frequencies, filter cut-off frequencies should increase to respect ripples standards. The AC inductor value and weight increase.
Therefore, the lightest inductor is not necessarily the best choice for obtaining the lightest inverter, which justifies the use of a global methodology.
In the rest of the paper, to be consistent with the experimental validation, the heatsink was not included in the optimization objective function.
3.2. Sensitivity Analysis and Optimality Demonstration
The optimality of the solution has to be checked to guarantee that the algorithm found the best solution. Thus, this paragraph validates the ability of the algorithm to find the optimal switching frequency. The switching frequency is only one of the variables of the design, but it is one of the most important for the whole converter, because it strongly affects the design of each component. For the following studies, the reference solution was the powder core solution.
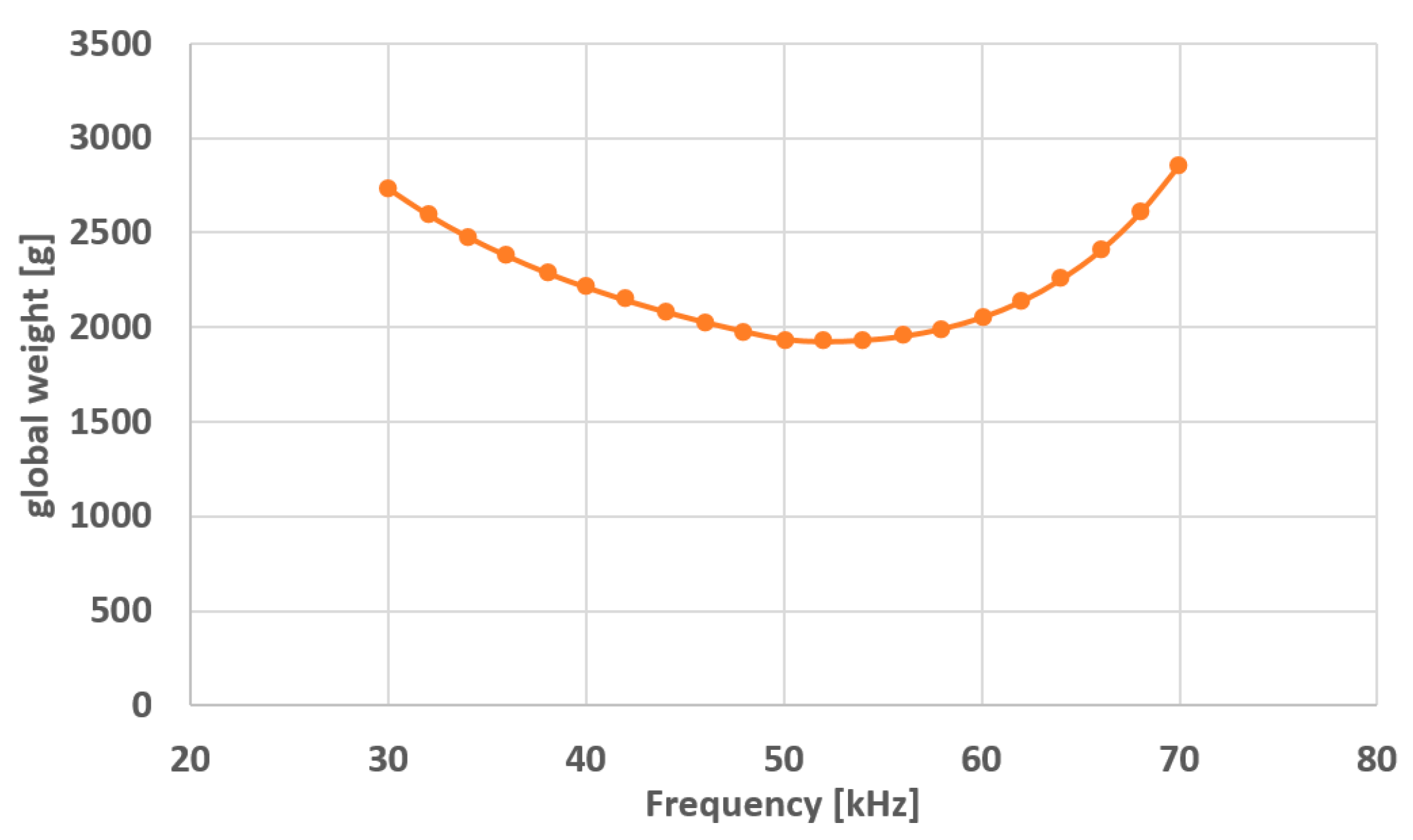
The first study consisted of imposing different switching frequencies at the beginning of the optimization process (
Figure 15). The optimal weight was found when the switching frequency was equal to 52 kHz, which is the same frequency found by the algorithm in the previous section. This means that the algorithm was able to choose the optimal switching frequency. Another conclusion with this graph is that shifting the optimal switching frequency from 20% (e.g., ±10 kHz) led to an average increase of 10% in the global weight. This study was carried out using some other parameters and gave equivalent results.
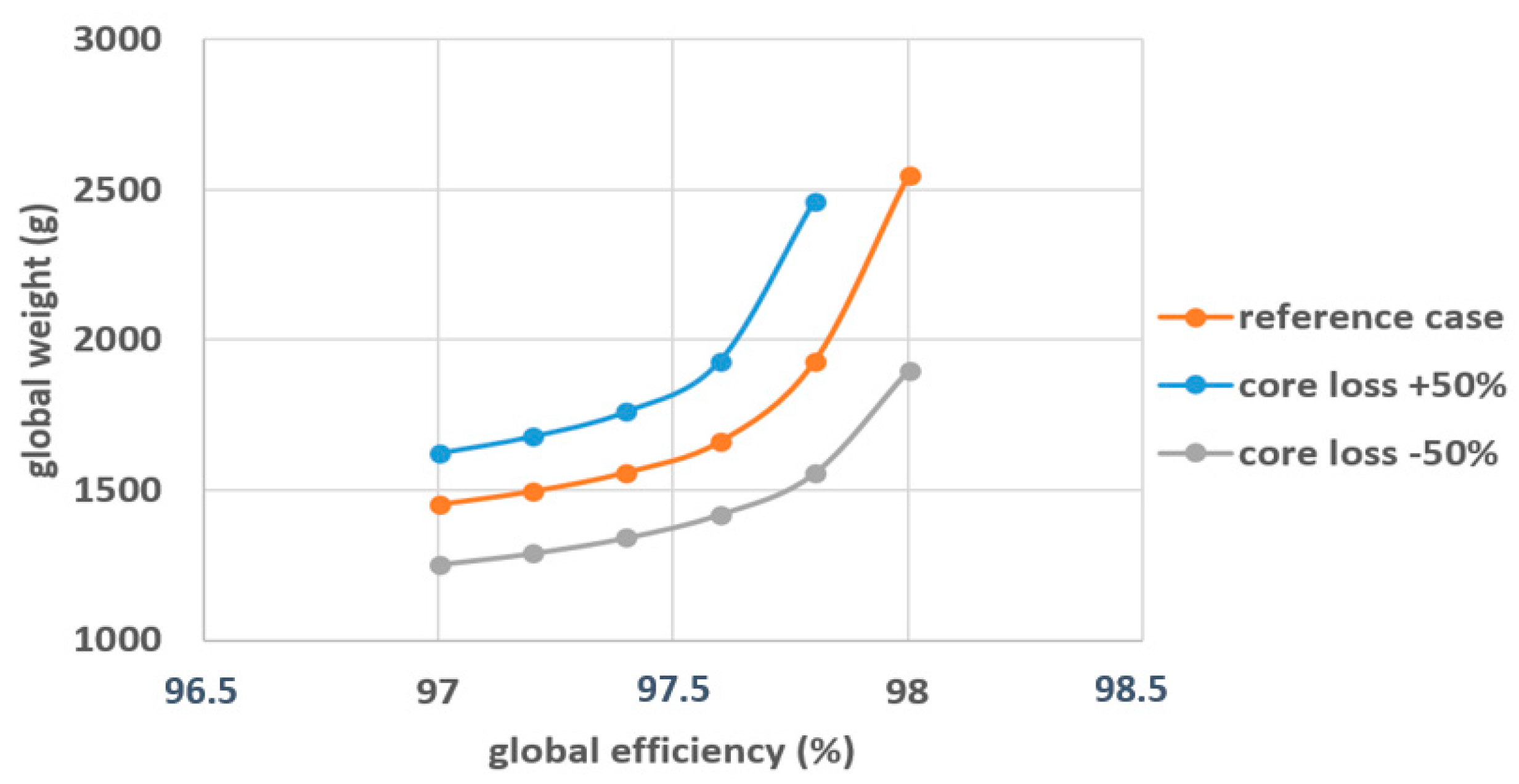
The results were obviously sensitive to model accuracy. This paragraph shows the impact of uncertainty in core losses on the total weight. Core loss was chosen because analytical models may lack precision due to the complex waveforms of PWM signals, impact of saturation, and DC bias.
Figure 16 shows that increasing core losses of 50% led to an 11% increase in the total loss for low-efficiency constraints. In the case of high-efficiency constraints, the difference was higher, and some efficiency points could not be achieved. Decreasing core losses by 50% led to a 14% drop in the total loss, and higher efficiency could be achieved. It is possible to quantify the impact on the design of a given uncertainty using this model. This study can lead the designer to choose to improve the models with high uncertainty and with high impact on the result.
The final study consisted of shifting the switching frequency after the end of the optimization process. The global weight of the converter remained unchanged.
Table 3 compares the main constraints of the following converters:
The optimal converter, with a switching frequency of 52 kHz;
The same converter, with a switching frequency of 42 kHz (−10 kHz);
The same converter, with a switching frequency of 62 kHz (+10 kHz).
The constraints of the optimal converter were always respected. Most of the constraints were really close to the limit value. The results in bold indicate that the parameter exceeded the limit value.
If the switching frequency decreased, many constraints were no longer respected, such as THD, hmax AC, ΔVDC, ΔIDC, and PTOT VOL AC. In addition, the RMS currents in both DC and AC capacitors increased, without reaching the limit. The explanation is simple; decreasing the switching frequency increased voltage and current ripples. This current ripple rise also increased the losses in the inductor. This was due to an increase in the induction ripple ΔB, which generated a global rise of core losses, even if the switching frequency decreased.
If the switching frequency increased, ripple constraints were not affected, but the efficiency requirement was no longer valid. Even if the inductor losses decreased slightly, semi-conductor losses increased because of commutation losses.
Therefore, if the switching frequency shifted from the optimal point, at least one of the constraints was no longer respected. This again justifies the optimization result found by the algorithm for the switching frequency.
Shifting the switching frequency by ±10 kHz led to an increase in the weight or a violation of one of the constraints. However, the new performances were really close to those of the optimal converter. This means that the solution found by the algorithm was robust to a shift in one of the parameters. An imprecision in input data for manufacturing reasons did not lead to a result far away from the predicted result.
3.3. From the Imaginary World to the Real World
A deterministic optimization algorithm, with a sequential quadratic programming (SQP) method [
27], was used to solve the global inverter design. As the deterministic optimization needs differentiable parameters, some variables can have imaginary values. For example, the number of turns of a passive device can be a non-integer, while the capacitor value/core size may not be available for purchase. In other words, the algorithm gives a theoretical optimum, which is very useful in the pre-sizing step of a project, and which allows fairly and quickly comparing two solutions, i.e., the aim of this study.
Even if prototyping a converter was not the main goal of this optimization, a methodology was developed to obtain a real converter from the optimal solution in the imaginary world. This methodology enables finding a feasible converter nearest to the optimal converter. It consists of sequentially imposing the input parameters of the model. After assigning a value to the first variable, another optimization is carried to find the new optimal point, resulting in an iterative process.
Therefore, the process is a succession of value assignment and optimization. The general method consists of firstly assigning the discrete parameters with the highest impact on the design result or those limited to a few discrete references in a catalog. In this application, to build and test a real converter in order to validate the optimization results, we firstly fixed the SiC devices, for which availability was very poor, then the AC inductor core and wires, followed by the AC capacitor and DC capacitor, and finally the switching frequency. We performed this sizing process for the three converters with 97.8% efficiency underlined in
Figure 9.
5. Experimental Validation of Optimization Results
The goal of this section is to check the validity of the optimization results and the models used in the optimization. As it is a pre-design tool, using only analytical equations, without simulation software or FEM tools, the accuracy of the results are not supposed to be as good as usual design models, but they allow solving a global design, by simultaneously considering all couplings inside the converter.
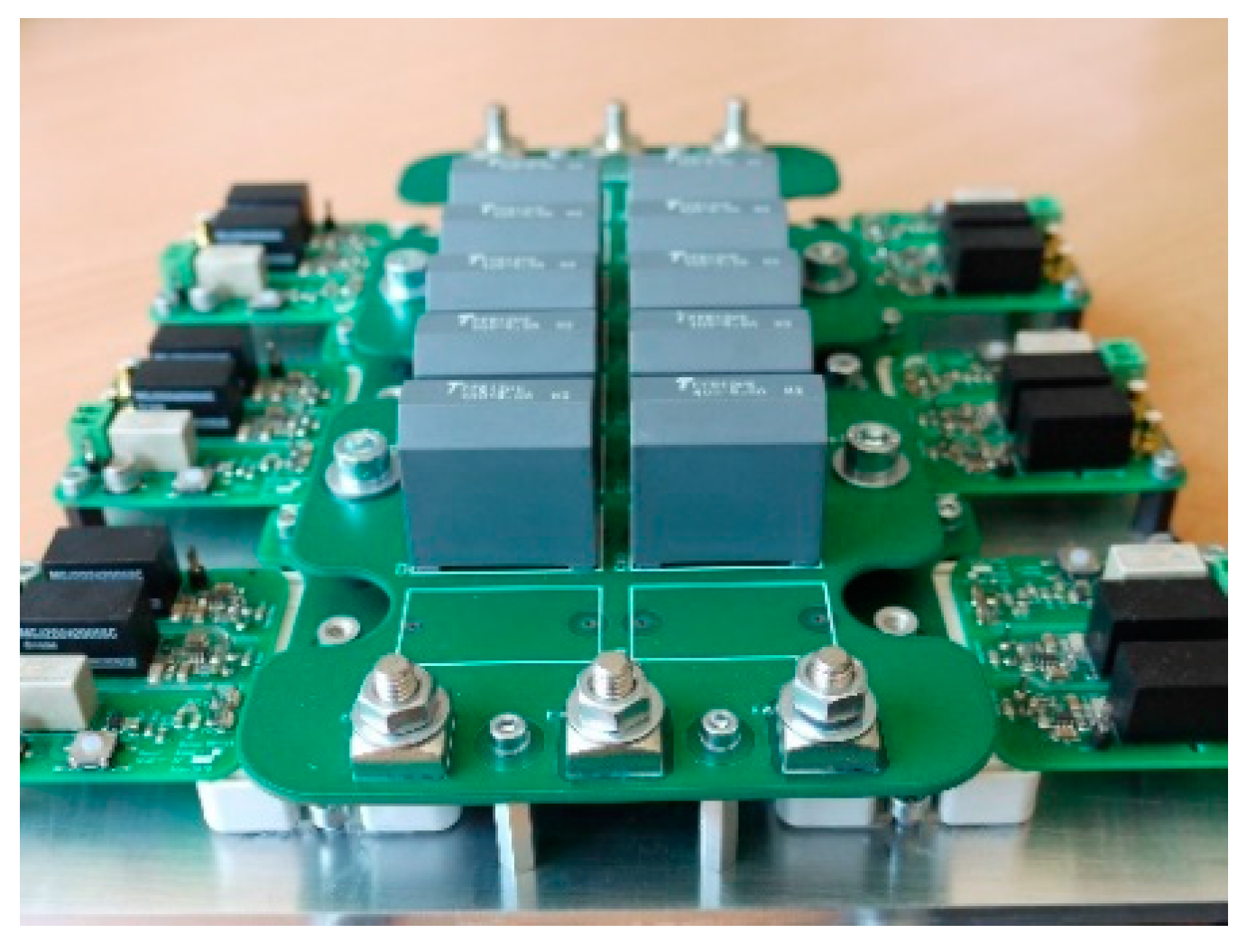
The three optimized converters were manufactured using the same common core shown in
Figure 20. Due to the limited availability of SiC devices, the semiconductors were identical for each converter, while only passive elements and switching frequency were changed among the three converters, according to the optimization results after the discretization process explained in
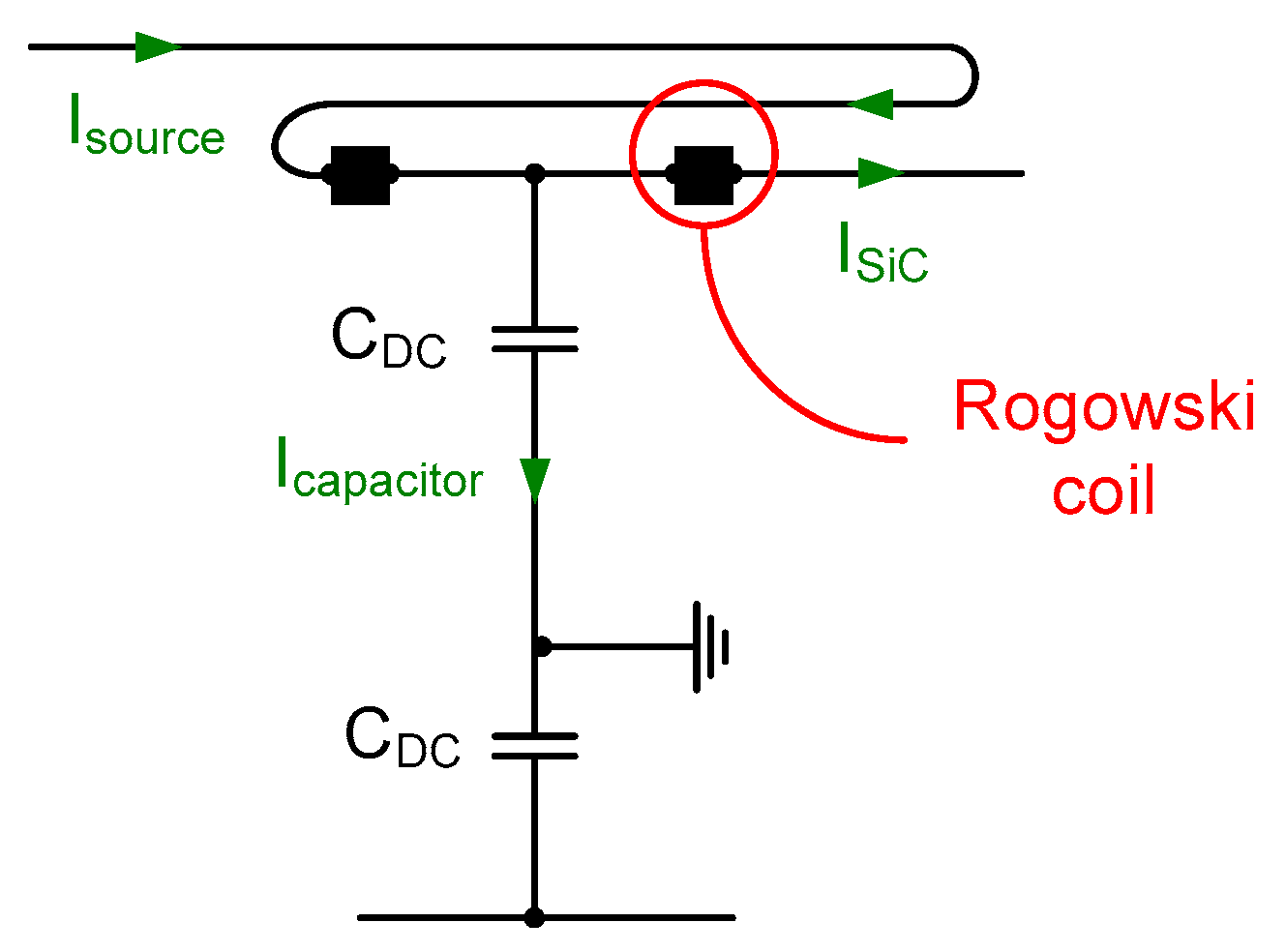
Section 3.3. One issue when experimentally validating some constraints is current measurement in the DC bus capacitors. Inserting a current sensor may modify the electrical path and change the measured current, especially in paralleled devices. It was decided to measure global current (
Figure 21) with a Rogowski coil embracing (1) the connection between the DC capacitor bus board and the semi-conductor board, and (2) the DC current coming from the source.
With a proper wire orientation in the coil, the two currents were subtracting, resulting in the DC capacitor current.
5.1. Powder Core Solution
This solution used a KoolMu core with a relative permeability of 60. The choice of the material and permeability was done considering the designer experience and the availability of products on the market. It is also possible to optimize the choice of material and permeability with the tool [
23].
Table 4 compares the optimization results with the main experimental measurements.
The comparison revealed few errors between the optimization results and the experiment. The error in the semi-conductor losses may have come from uncertainty in the manufacturer data. The main issue in the experimental results was the presence of low-frequency harmonics, which affected the measurement of ripples and THD. These harmonics came from the dead times between the control of the two MOSFETS in a phase leg. Low-frequency harmonics caused by dead time can be eliminated with an appropriate closed loop control [
30,
31]. Assuming that the closed loop control will not affect losses or high-frequency oscillations, the results are shown without taking into account the impact of these low-frequency harmonics.
The measured voltage THD and the maximum voltage harmonic were lower than what the model expected. This was due to the saturation of the inductance along the low-frequency period, which was considered in the worst case in the model; in the frequency model (
Section 2.3), time-varying inductance was not considered, and the minimum value was used, which is the worst case.
Finally, DC voltage, current ripple, THD, and maximum AC voltage harmonic measurements were not precise and may have led to some errors, because the measure concerned a small percentage of the whole signal. Additional circuit simulations were carried out to verify that the converter respected these constraints.
5.2. Ferrite Core Solution
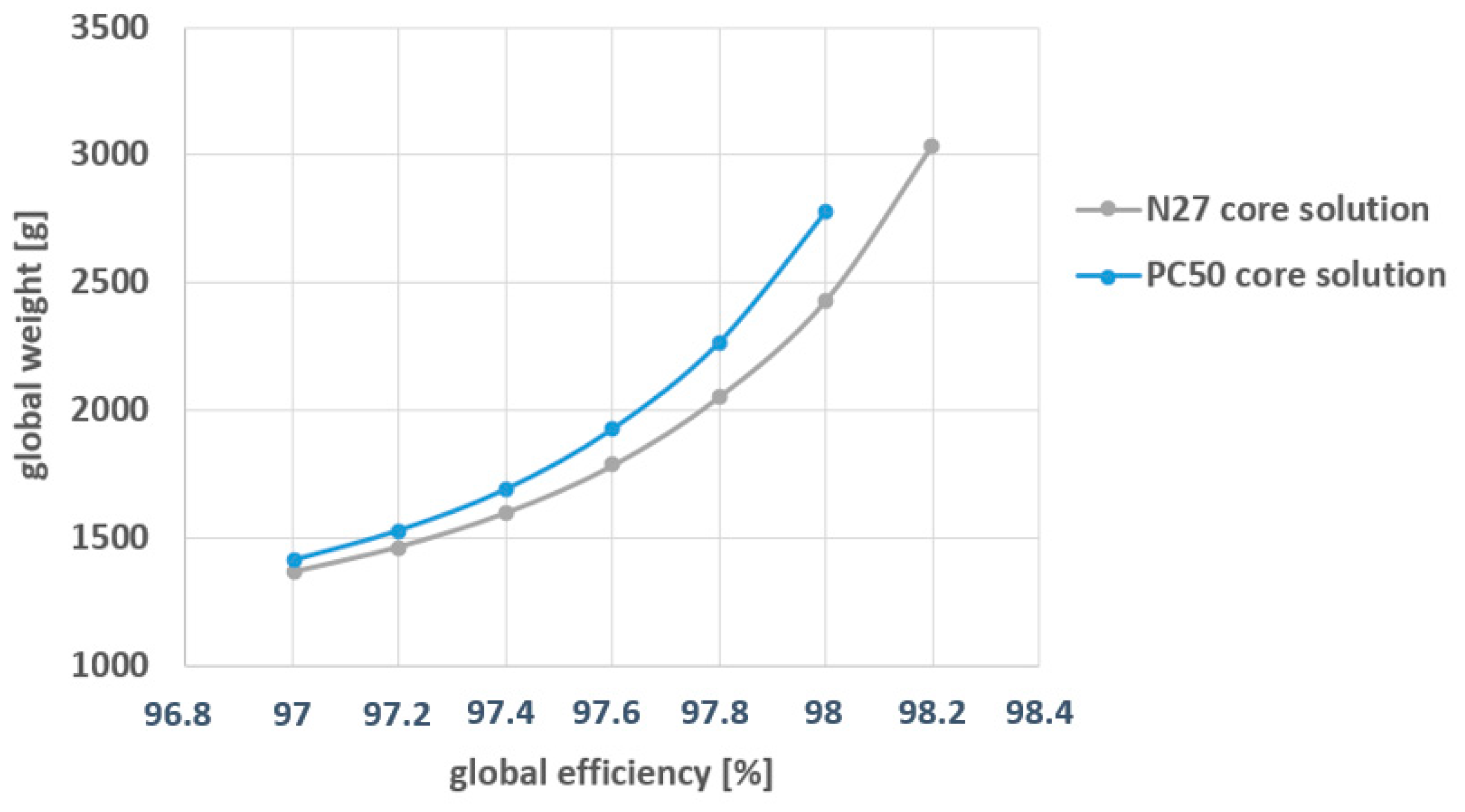
The choice of the ferrite core material was investigated with a preliminary study. Because of the use of an SiC device, high-frequency cores could be considered.
Figure 22 shows two Pareto fronts with optimal solutions: one using N27 ferrite and one using PC50 ferrite, which is suitable for high-frequency applications (100–500 kHz).
At 97% efficiency, the optimal switching frequency was 130 kHz, while it was 60 kHz for 98% efficiency. At 130 kHz, results with PC50 material were equivalent to the results with N27. However, N27 material was better at 60 kHz, because the switching frequency was out of the scope of performance of PC50 material. Using a high-frequency core (PC50) in this application was not relevant because the switching frequency was not high enough, despite the use of an SiC device.
Consequently, N27 ferrite core was preferred for the experiment, with a PM shape. Results are shown in
Table 5.
The experimental results were again close to the expectations. The same error in semi-conductor losses appeared. The model also underestimated the inductor losses. This was predictable because the conductors wound close to the air gap resulted in extra copper losses due to the magnetic field induced. The Dowell model was not suitable for this purpose, and a three-dimensional (3D) finite element simulation would be required to precisely estimate these losses. However, the error was not too critical (<20%) for a pre-design tool.
5.3. Empirical Constraint Solution
This solution used a KoolMu core with a relative permeability of 26. Decreasing the permeability from 60 to 26 compared to the optimal powder core solution was the best option to handle the additional constraints on the current ripple and the permeability drop. Comparisons between optimization result and experimental result are shown in
Table 6.
The measurements carried out revealed very few differences compared to the optimization result. The global behavior of the converter was close to the two previous solutions, except that the converter was far heavier than the two others, which validated the optimization results. This confirmed that leaving freedom to the algorithm to explore a space of solution with high current ripple and some permeability drop allows obtaining better solutions, without scarifying converter performance.
6. Conclusions
A pre-design optimization method was presented and evaluated to design a three-phase PWM inverter for aircraft application. The tool uses a gradient-based algorithm, which allows considering a huge number of variables and constraints, which is not the case for usual design methods based on stochastic approaches. In the considered example, 20 variables and 20 constraints were handled. The method was able to provide quick results (less than 5 min) with acceptable accuracy, which is especially useful in the pre-design step of a project, where quick answers are needed.
Analytical models were used to be compatible with the gradient-based algorithm. Thus, the goal was to find or develop accurate and light analytical models for passive and active components, as well as to evaluate losses, ripples, and thermal constraints.
Many optimizations were carried out and illustrated with Pareto fronts. Different results were compared and discussed, in order to understand and confirm the choices of the algorithm.
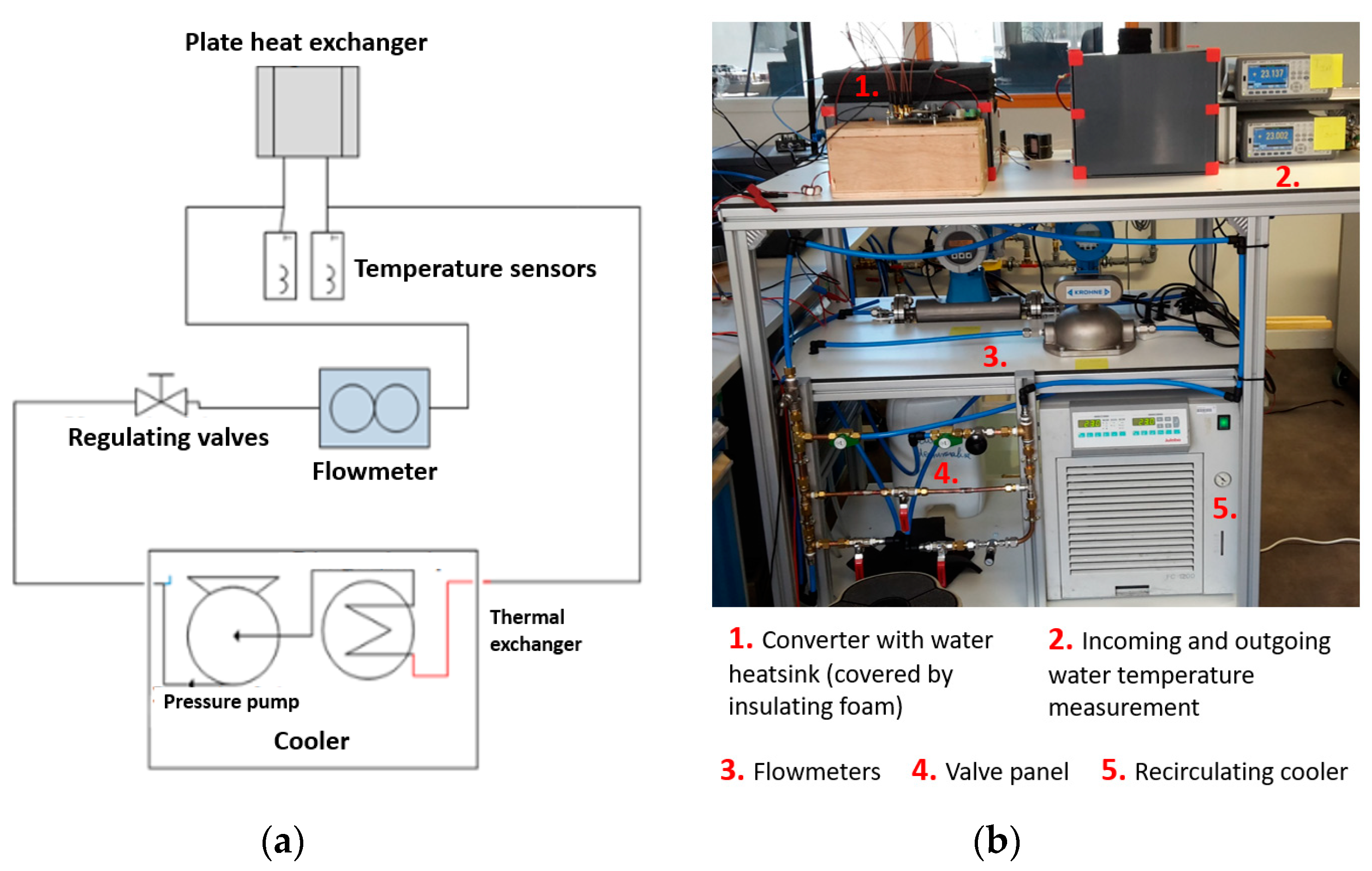
Finally, experimental validations were presented. Two precise calorimetric benches were used to measure passives and actives losses. The measurements were compared to the optimization tool results. No significant differences were found, which justifies the accuracy of the developed method and models.
Further work will focus on the comparison of performances between different topologies (interleaved, multilevel) and may integrate constraints coming from the system level (EMC, mission profiles).

 ,
, 























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}