NOVA Mobility Assistive System: Developed and Remotely Controlled with IOPT-Tools

 , ,
, ,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
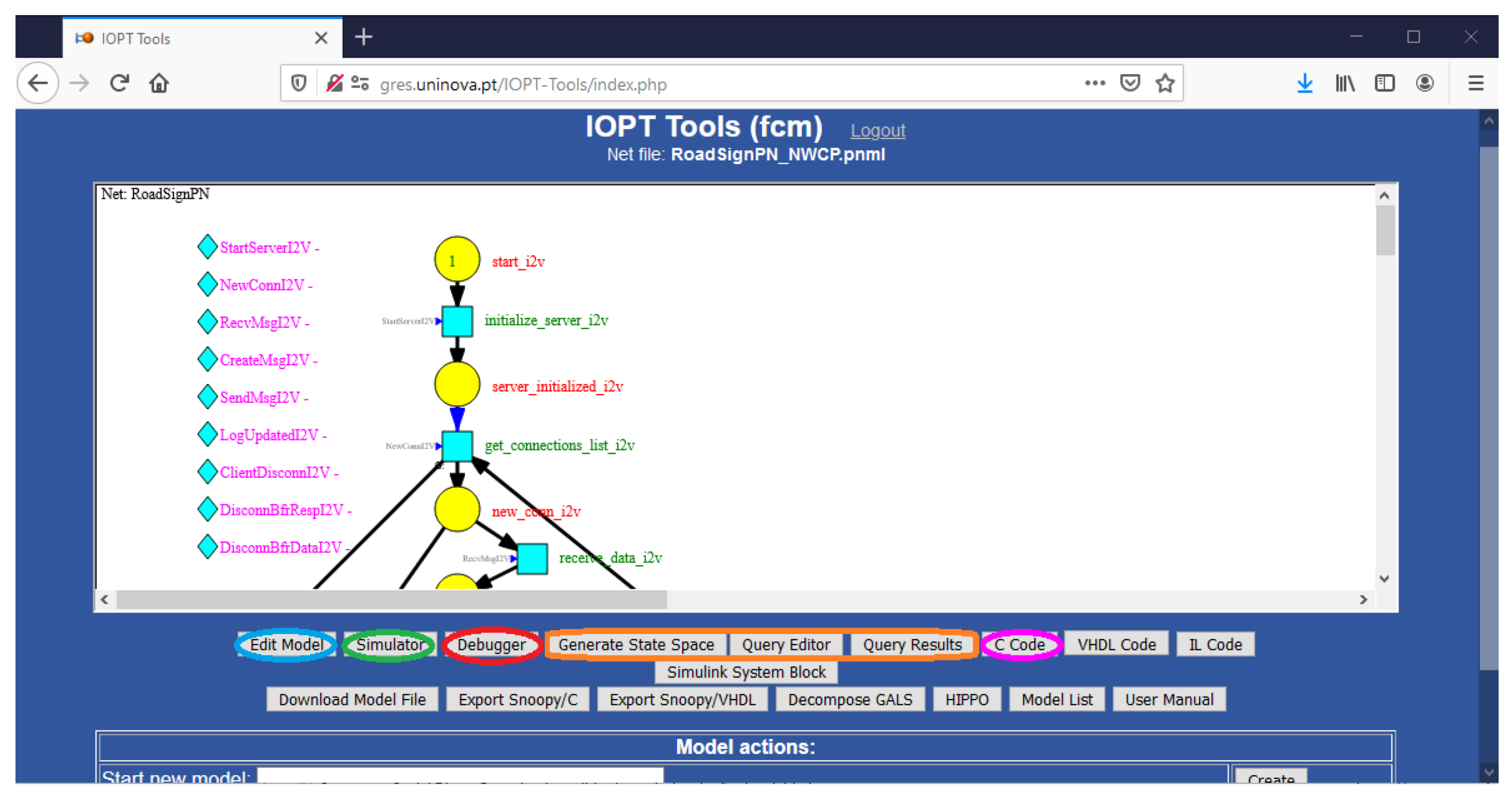
2. IOPT-Nets and IOPT-Tools
3. Related Work
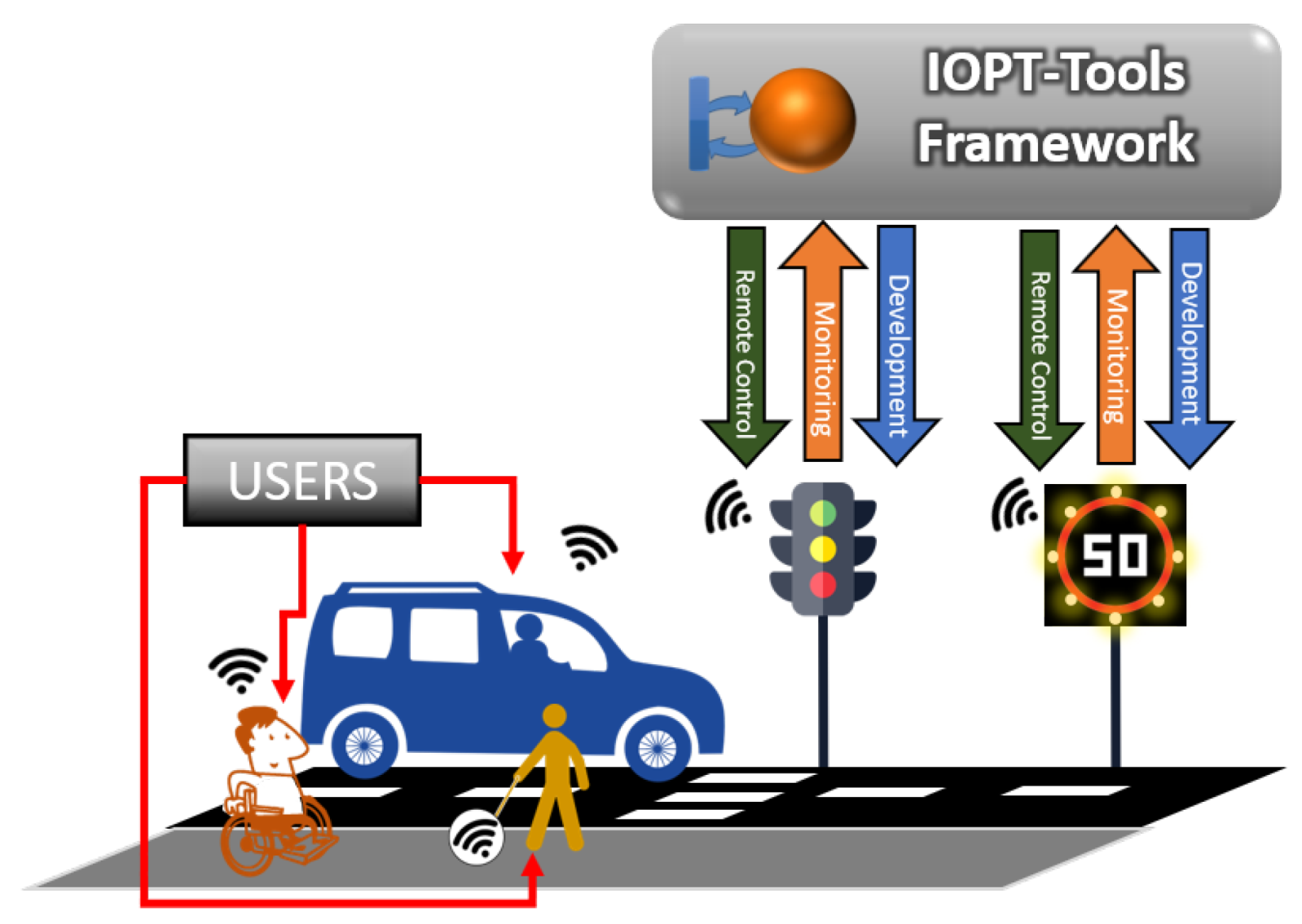
4. NOVA Mobility Assistive System
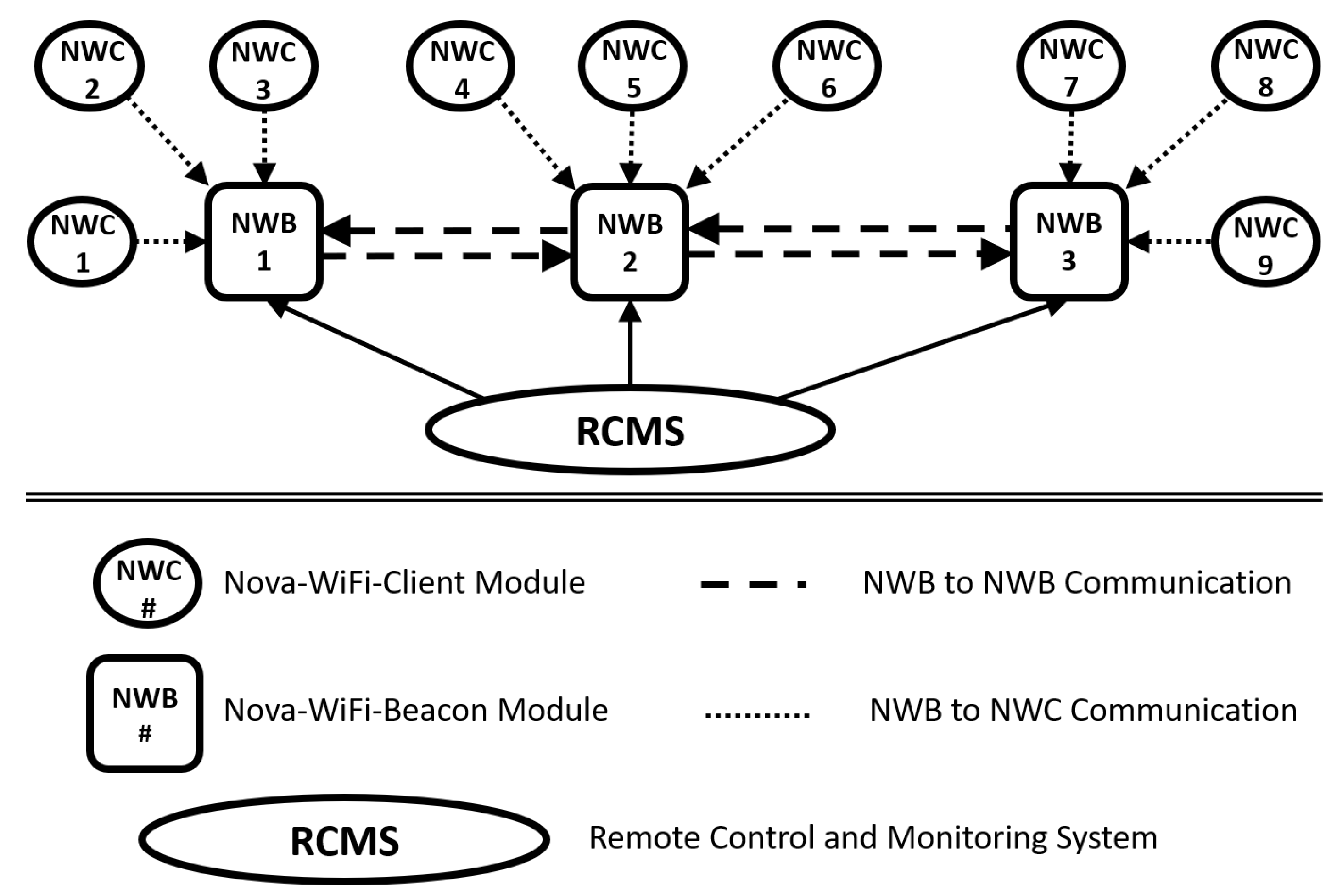
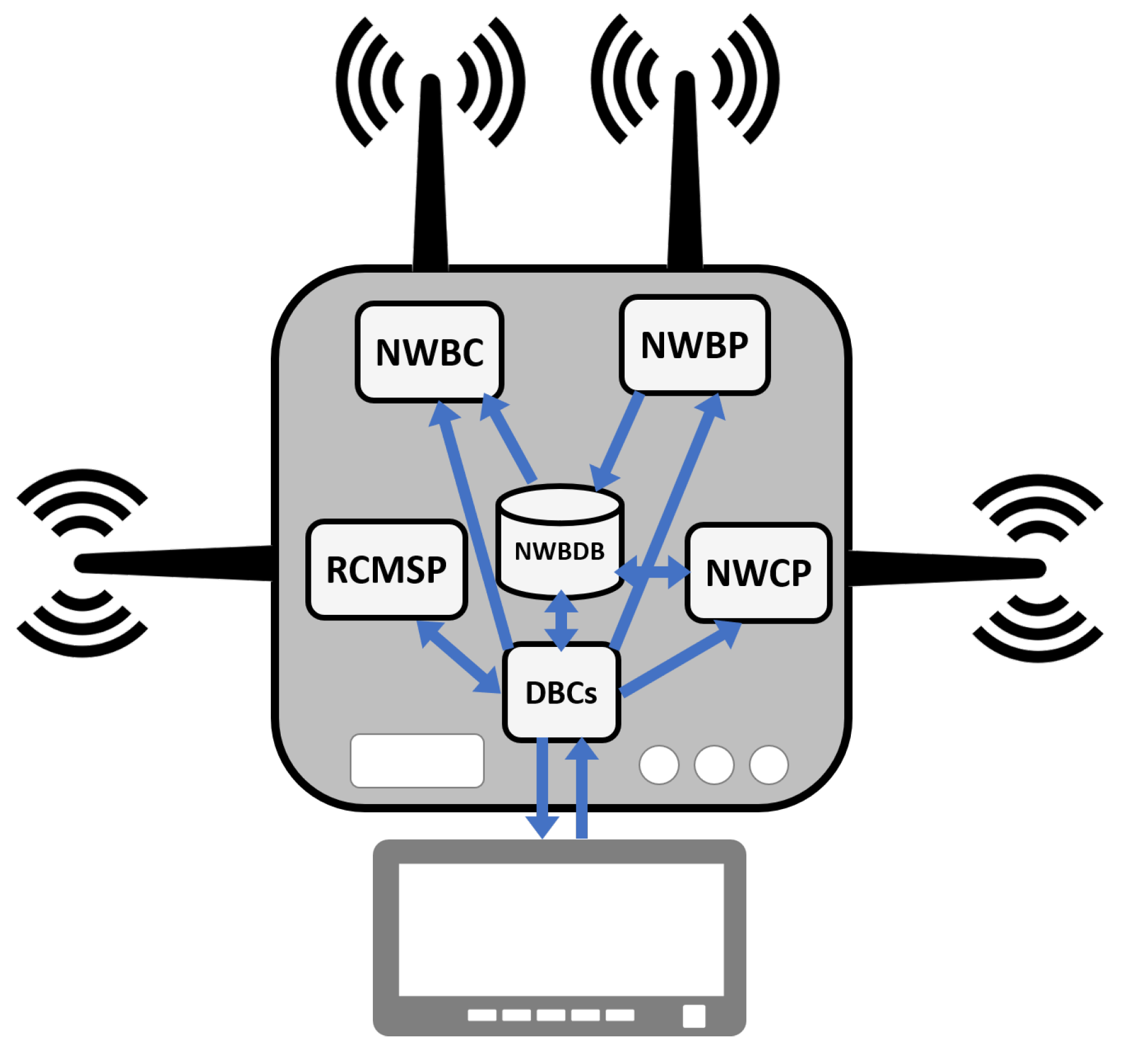
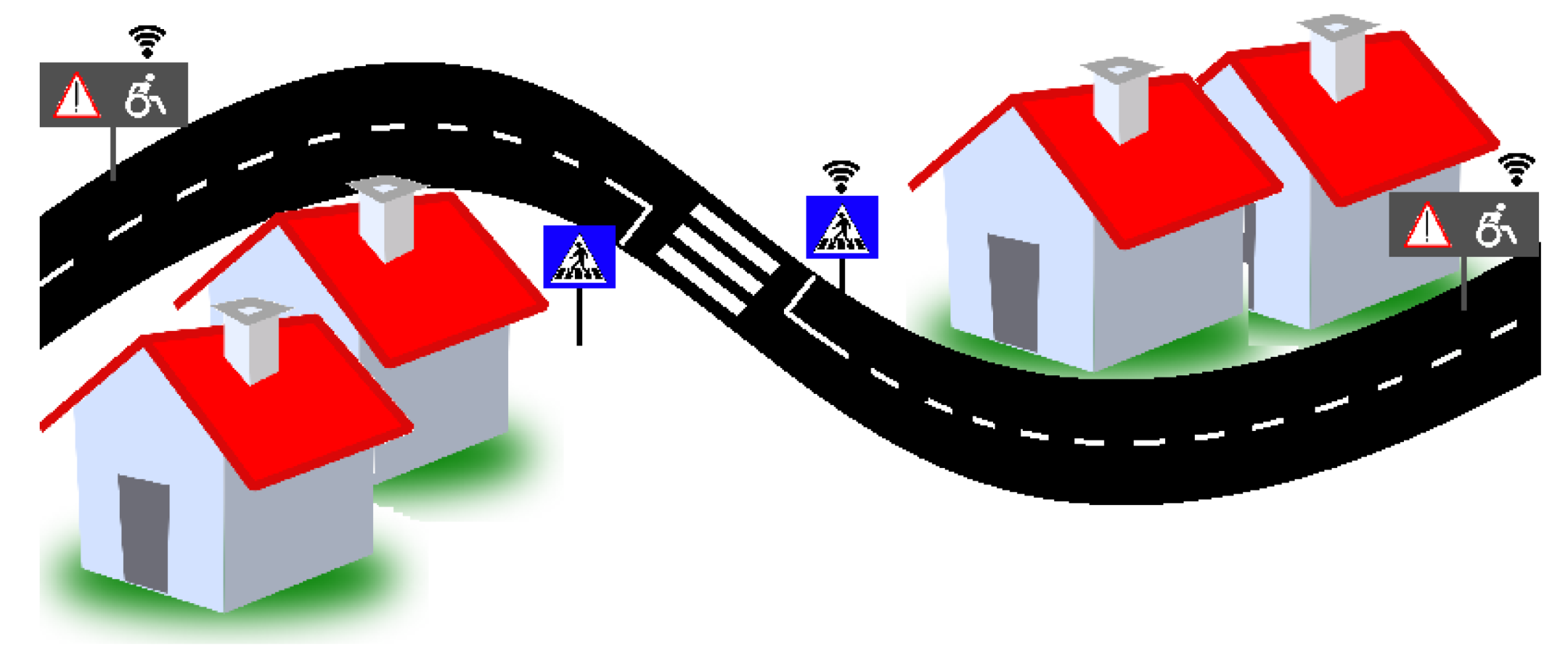
4.1. Architecture
- NOVA-WiFi-Client Provider (NWCP)—responsible for receiving and sending data to NWCs;
- NOVA-WiFi-Beacon Provider (NWBP)—responsible for receiving data from other NWBs;
- NOVA-WiFi-Beacon Consumer (NWBC)—responsible for sending data to other NWBs;
- NOVA-WiFi-Beacon DataBase (NWBDB)—containing data about the NWB, its neighbors, and about the last connected NWCs;
- RCMS Provider (RCMSP)—responsible for receiving commands and sending data to RCMSs; and,
- Dynamic Beacon Controllers (DBCs)—controls the dynamic/behavior of the infrastructure (for example, the lights of a traffic light sign) and the NWCP, NWBP, and NWBC modules.
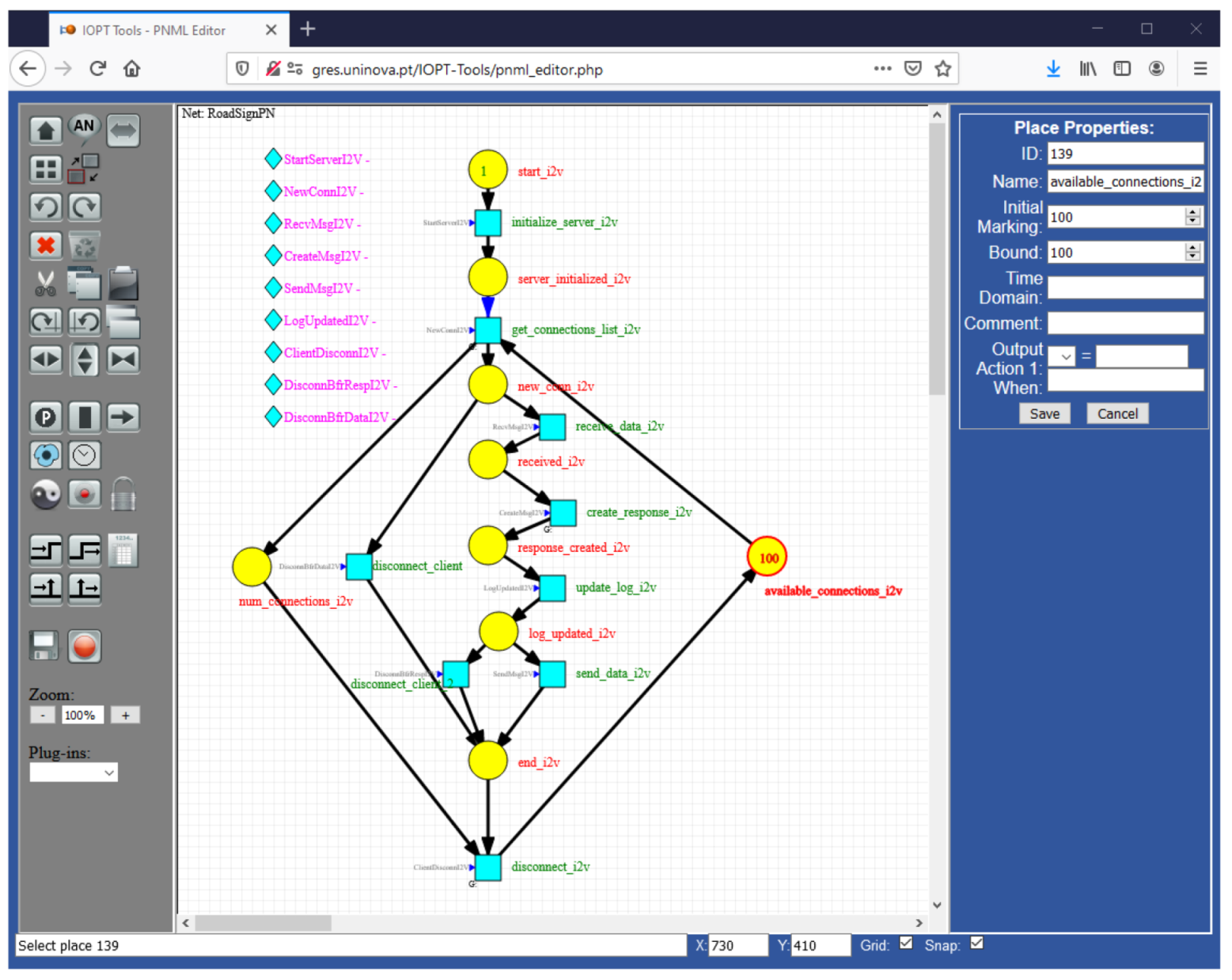
4.2. Development Approach
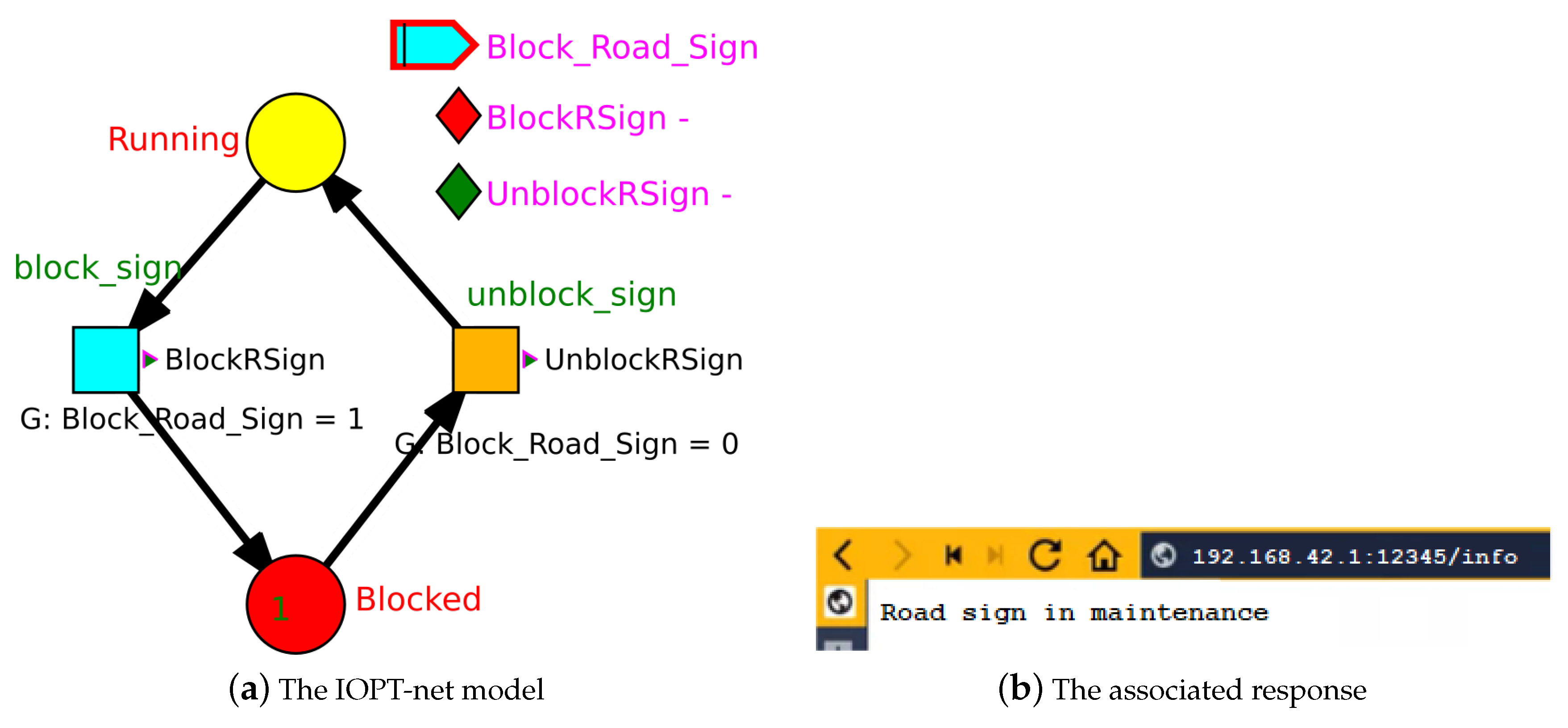
- specify the DBCs module through a set of IOPT-net models (in the IOPT model editor), which includes the models of the sub-systems that control:
- NWCP, NWBP, and NWBC modules; and,
- the NWB dynamic behavior, for example, to control the lights of a traffic light sign;
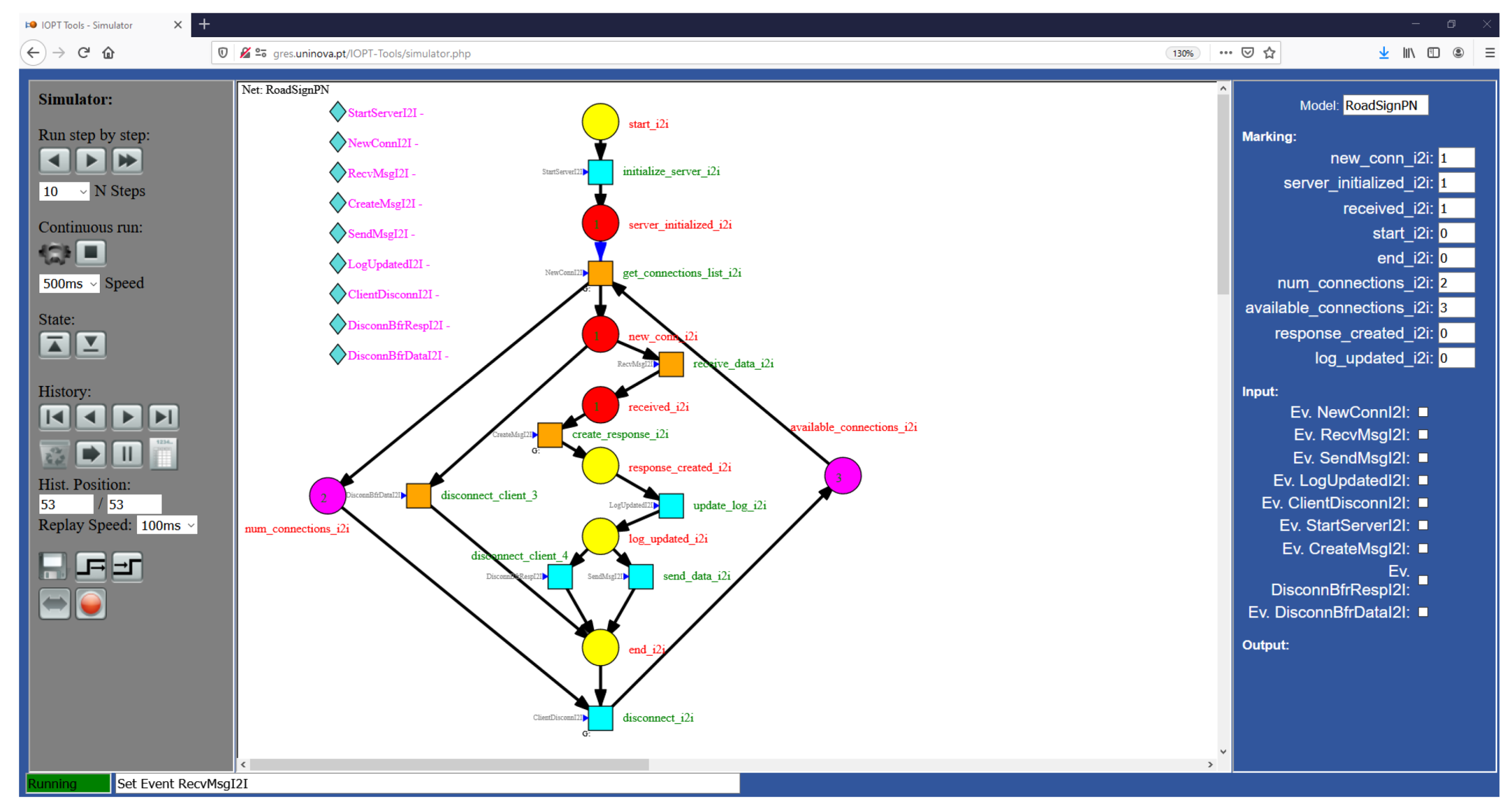
- simulate the created/updated models in the IOPT simulator tools, and update the created models, if required;
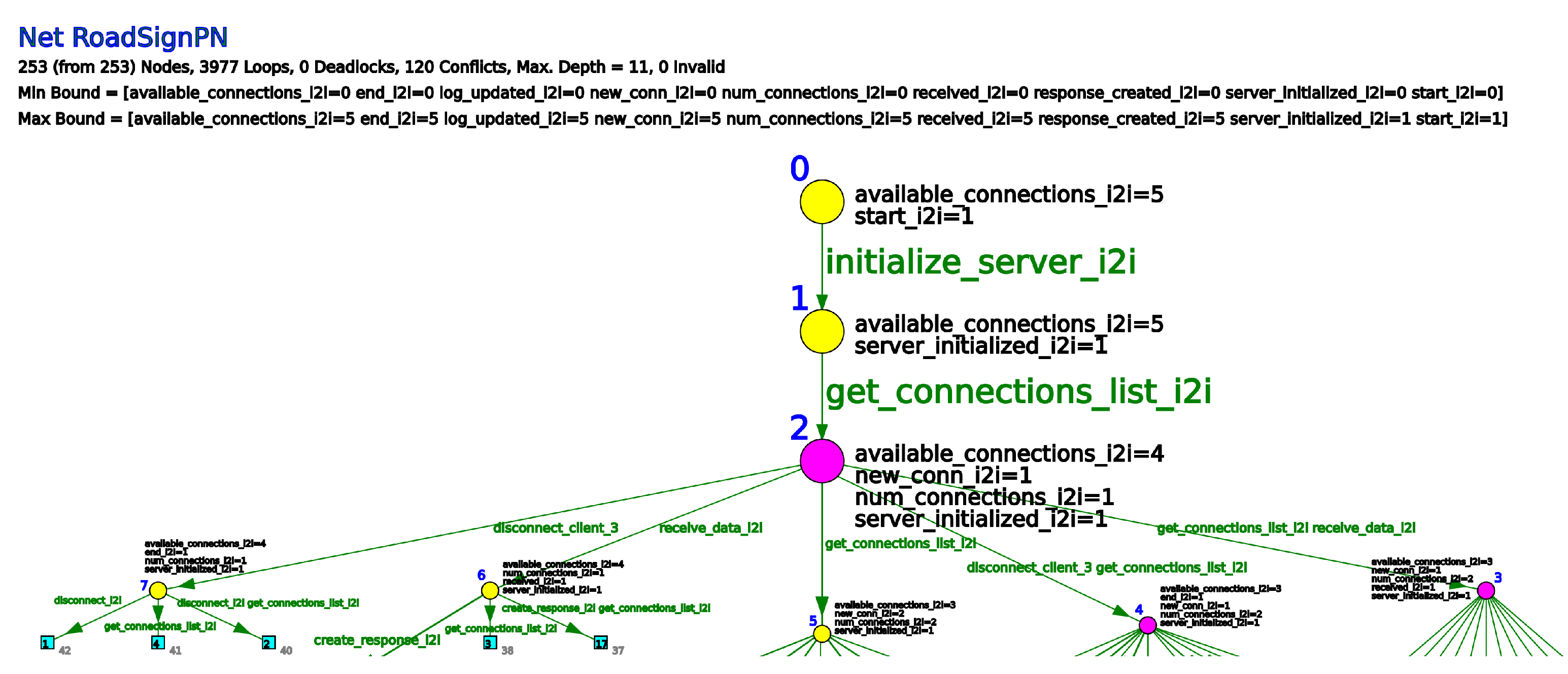
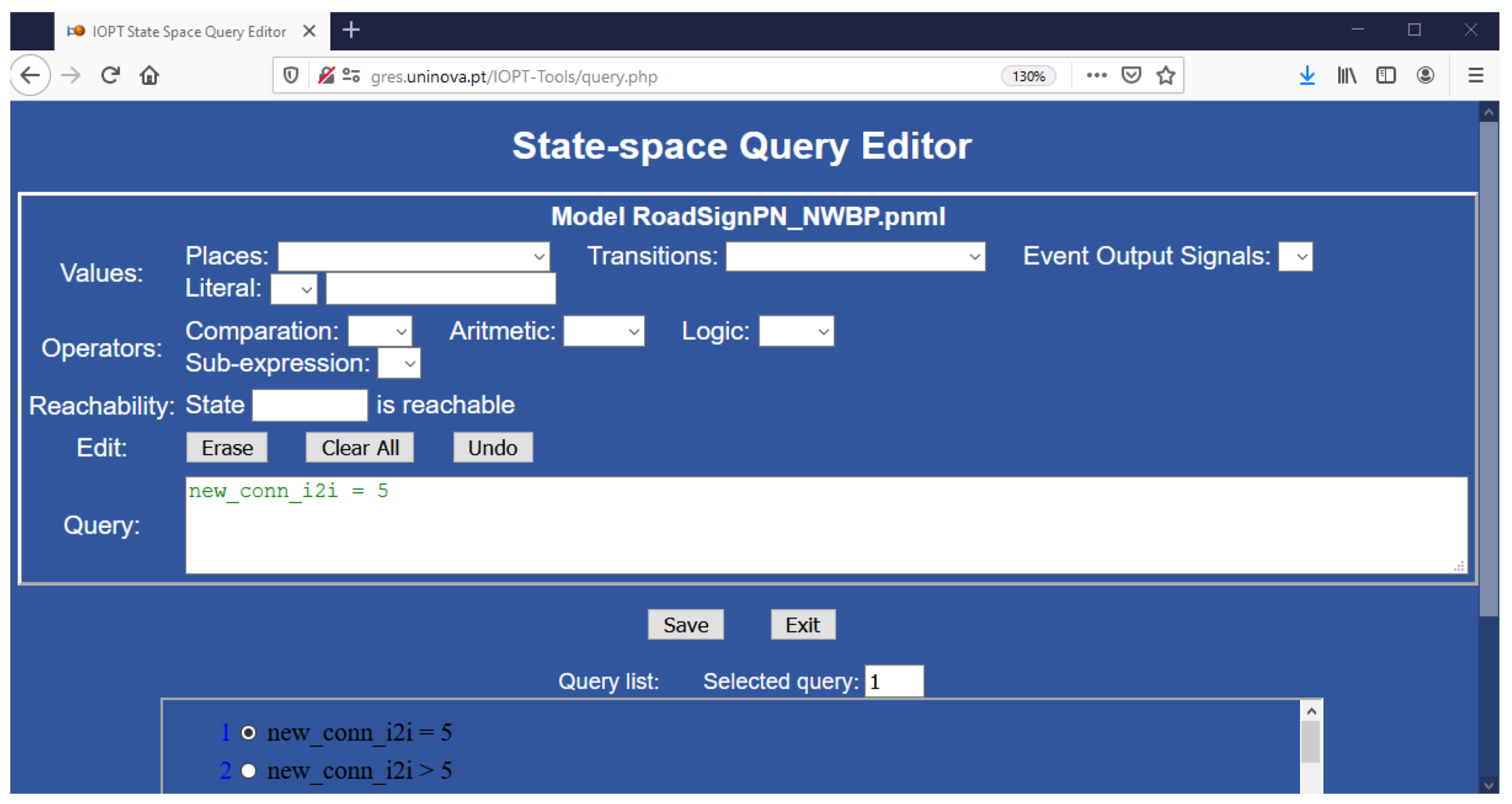
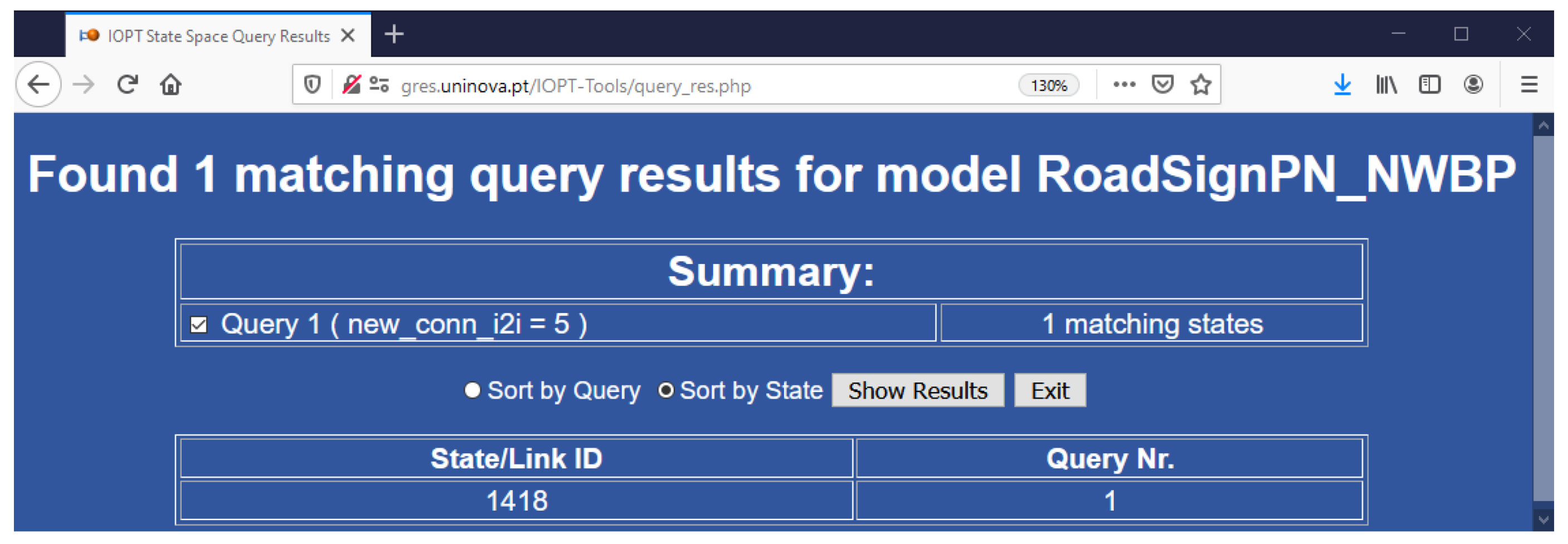
- using the IOPT model-checking tools: write a set of queries about the models; generate their state-spaces, check the queries result to verify if the models have the desired proprieties; and update the created models, if necessary;
- using the IOPT to C code generation tool: automatically generate the implementation code, which includes the DBCs module and an HTTP server that supports the remote control and monitoring (implements the RCMSP module); and,
- during tests: monitor and influence the controllers’ execution through the IOPT debugger tool; update the created models, if necessary, and repeat the previous steps.
5. Prototypes
5.1. Development Approach
5.2. Implementation
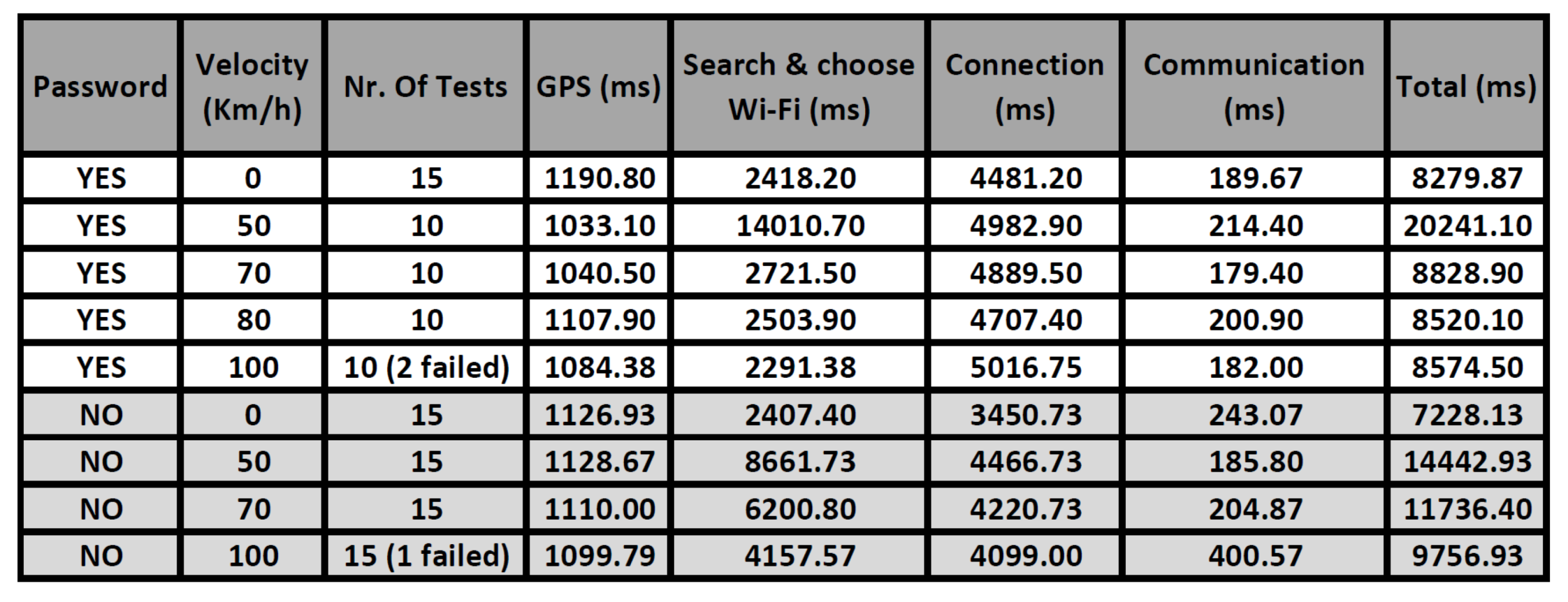
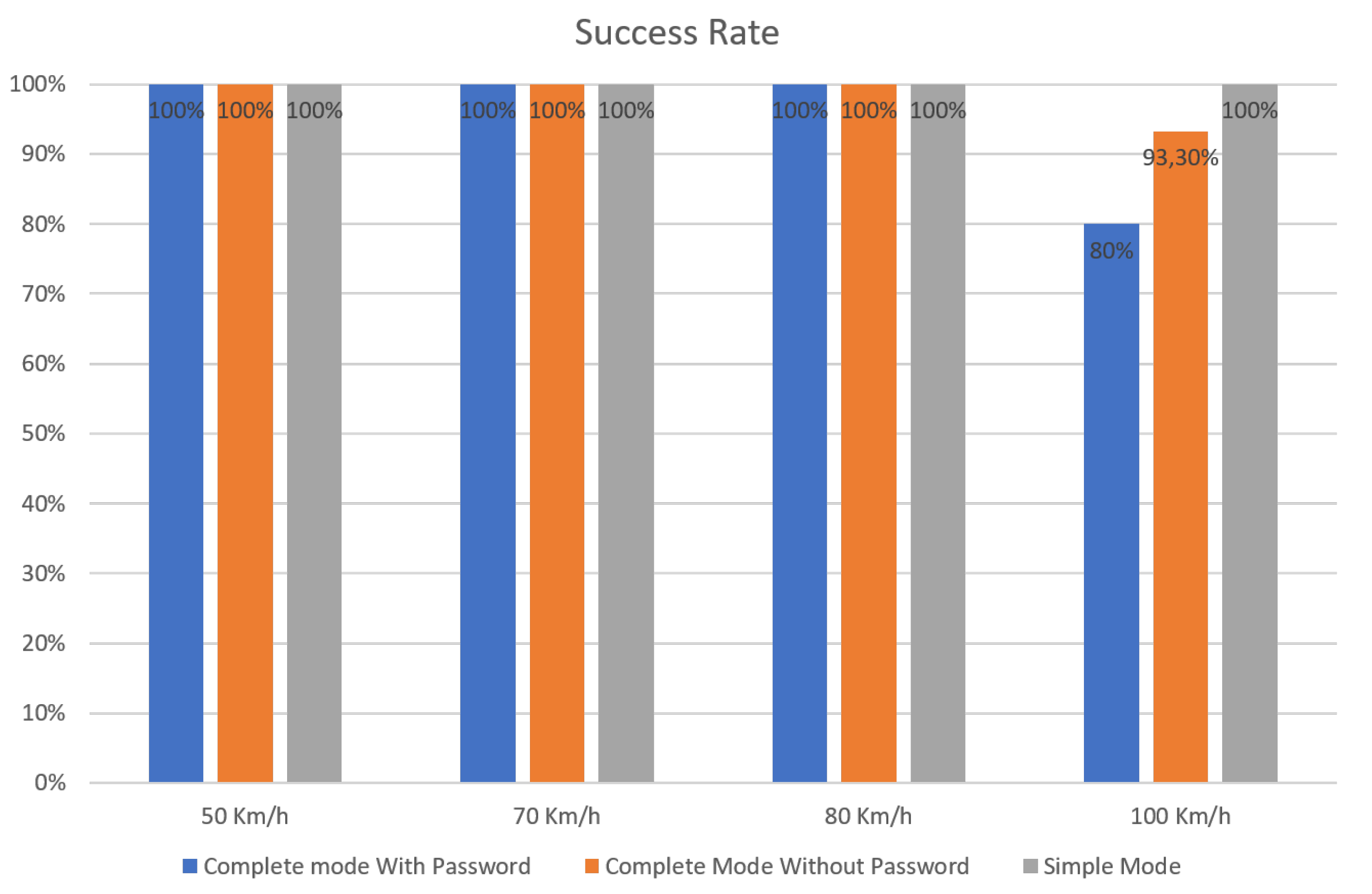
6. Tests and Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- WHO|Disability. 2011. Available online: https://www.who.int/disabilities/world_report/2011/report/en/ (accessed on 26 May 2020).
- World Report on Disability. 2011. Available online: https://www.who.int/news-room/fact-sheets/detail/disability-and-health (accessed on 26 May 2020).
- CBM|How to Make Cities Accessible and Inclusive. 2017. Available online: https://www.cbm.org/fileadmin/user_upload/Publications/How_to_make_cities_accessible_and_inclusive_Web_FINAL.PDF (accessed on 26 May 2020).
- What Are Some Types of Assistive Devices and How Are They Used? 2018. Available online: https://www.nichd.nih.gov/health/topics/rehabtech/conditioninfo/device (accessed on 26 May 2020).
- Assistive Technology. 2018. Available online: https://www.who.int/news-room/fact-sheets/detail/assistive-technology (accessed on 26 May 2020).
- Moiseev, V.V.; Sudorgin, O.A.; Naberushkina, E.; Raydugin, D.S. Inclusive Properties of the City and Urban Citizenship of People with Disabilities. In Proceedings of the 2019 5th International Conference on Social Science and Higher Education (ICSSHE 2019), Xiamen, China, 23–25 August 2019; Atlantis Press: Beijing, China, 2019; pp. 136–139. [Google Scholar] [CrossRef] [Green Version]
- Koontz, A.M.; Bass, S.R.; Kulich, H.R. Accessibility facilitators and barriers affecting independent wheelchair transfers in the community. Disabil. Rehabil. Assist. Technol. 2020. [Google Scholar] [CrossRef] [PubMed]
- Bækgaard, E.S. Mobility Scooter Accidents—Need for Preventative Action? Clin. Med Rev. Case Rep. 2017, 4, 1–4. [Google Scholar] [CrossRef]
- Carlsson, A.; Lundälv, J. Acute injuries resulting from accidents involving powered mobility devices (PMDs)—Development and outcomes of PMD-related accidents in Sweden. Traffic Inj. Prev. 2019, 20, 484–491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kraemer, J.D.; Benton, C.S. Disparities in road crash mortality among pedestrians using wheelchairs in the USA: Results of a capture–recapture analysis. BMJ Open 2015, 5. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leaman, J.; La, H.M. A Comprehensive Review of Smart Wheelchairs: Past, Present, and Future. IEEE Trans. Hum. Mach. Syst. 2017, 47, 486–499. [Google Scholar] [CrossRef] [Green Version]
- Viswanathan, P.; Wang, R.; Kenyon, L.; Foley, G.; Miller, W.; Bell, J.; Kirby, R.; Simpsson, R.; Mihailidis, A.; Adams, M.; et al. Smart Wheelchairs in Assessment and Training (SWAT): State of the Field (Age-Well NCE Position Paper). In Proceedings of the 2015 IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015. [Google Scholar]
- Hersh, M.; Ferreira, M.G.G.; Ramirez, A.R.G. Introductory Chapter: The Role of Assistive Technologies in Smart Cities. In Assistive Technologies in Smart Cities; IntechOpen: London, UK, 2018; Chapter 1. [Google Scholar] [CrossRef] [Green Version]
- Disability in Smart Cities: Assessing Assistive Technologies and Urban Accessibility. 2019. Available online: https://www.oxfordurbanists.com/magazine/2019/1/11/disability-in-smart-cities-assessing-assistive-technologies-and-urban-accessibility (accessed on 26 May 2020).
- Smart Cities for All: A Vision for an Inclusive, Accessible Urban Future. 2017. Available online: https://smartcities4all.org/wp-content/uploads/2017/06/Smart-Cities-for-All-A-Vision-for-an-Inclusive-Accessible-Urban-Futur...-min.pdf (accessed on 26 May 2020).
- Liu, Z.; Glassey, N.; Sokhn, M.; de Gaspari, E. Crowdsourcing-Based Mobile Application for Wheelchair Accessibility. J. Technol. Pers. Disabil. 2017, 5, 1–15. [Google Scholar]
- Weld, G.; Jang, E.; Li, A.; Zeng, A.; Heimerl, K.; Froehlich, J.E. Deep Learning for Automatically Detecting Sidewalk Accessibility Problems Using Streetscape Imagery. In Proceedings of the 21st International ACM SIGACCESS Conference on Computers and Accessibility, ASSETS’19, Pittsburgh, PA, USA, 28–30 October 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 196–209. [Google Scholar] [CrossRef] [Green Version]
- Panta, Y.R.; Azam, S.; Shanmugam, B.; Yeo, K.C.; Jonkman, M.; De Boer, F.; Alazab, M. Improving Accessibility for Mobility Impaired People in Smart City using Crowdsourcing. In Proceedings of the 2019 Cybersecurity and Cyberforensics Conference (CCC), Melbourne, Australia, 8–9 May 2019; pp. 47–55. [Google Scholar]
- Khan, U.; Lee, S. Multi-layer problems and solutions in VANETs: A review. Electronics 2019, 8, 204. [Google Scholar] [CrossRef] [Green Version]
- Mullapathi Farooq, S.; Hussain, S.; Sk, K.; Ustun, T.S. Certificate based security mechanisms in vehicular Ad-Hoc networks based on IEC 61850 and IEEE WAVE standards. Electronics 2019, 8, 96. [Google Scholar] [CrossRef] [Green Version]
- Talavera, E.; Anaya, J.; Gómez, O.; Alonso, F.; Naranjo, J. Performance Comparison of Geobroadcast Strategies for Winding Roads. Electronics 2018, 7, 32. [Google Scholar] [CrossRef] [Green Version]
- Gomes, L.; Barros, J.P.; Costa, A.; Nunes, R. The Input-Output Place-Transition Petri Net Class and Associated Tools. In Proceedings of the 2007 5th IEEE International Conference on Industrial Informatics, Vienna, Austria, 23–27 June 2007; Volume 1, pp. 509–514. [Google Scholar] [CrossRef]
- Pereira, F.; Moutinho, F.; Gomes, L. IOPT-tools—Towards cloud design automation of digital controllers with Petri nets. In Proceedings of the 2014 International Conference on Mechatronics and Control (ICMC), Jinzhou, China, 3–5 July 2014; pp. 2414–2419. [Google Scholar] [CrossRef]
- Reisig, W. Petri Nets: An Introduction; Springer: New York, NY, USA, 1985. [Google Scholar]
- Yaqub, O.; Li, L. Modeling and Analysis of Connected Traffic Intersections Based on Modified Binary Petri Nets. J. Adv. Transp. 2013, 2013. [Google Scholar] [CrossRef]
- Riouali, Y.; Benhlima, L.; Bah, S. Extended Batches Petri Nets Based System for Road Traffic Management in WSNs. J. Sens. Actuator Netw. 2017, 6, 30. [Google Scholar] [CrossRef] [Green Version]
- Vázquez, C.R.; Sutarto, H.Y.; Boel, R.; Silva, M. Hybrid Petri net model of a traffic intersection in an urban network. In Proceedings of the 2010 IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010; pp. 658–664. [Google Scholar] [CrossRef]
- Wang, J.; Yan, J.; Li, L. Microscopic Modeling of a Signalized Traffic Intersection Using Timed Petri Nets. IEEE Trans. Intell. Transp. Syst. 2016, 17, 305–312. [Google Scholar] [CrossRef]
- Ahmane, M.; Abbas-Turki, A.; Perronnet, F.; Wu, J.; Moudni, A.E.; Buisson, J.; Zeo, R. Modeling and controlling an isolated urban intersection based on cooperative vehicles. Transp. Res. Part Emerg. Technol. 2013, 28, 44–62. [Google Scholar] [CrossRef] [Green Version]
- Ng, K.M.; Reaz, M.B.I.; Ali, M.A.M. A Review on the Applications of Petri Nets in Modeling, Analysis, and Control of Urban Traffic. IEEE Trans. Intell. Transp. Syst. 2013, 14, 858–870. [Google Scholar] [CrossRef]
- Kombe, T.; Ele, P.; Offole, F.; Miasse, H. Modelling an Interactive Road Signs System, Using Petri Nets. Transp. Telecommun. J. 2017, 18. [Google Scholar] [CrossRef] [Green Version]
- Pereira, F.; Moutinho, F.; Gomes, L. Model-checking framework for embedded systems controllers development using IOPT Petri nets. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 1399–1404. [Google Scholar] [CrossRef]
- Campos-Rebelo, R.; Pereira, F.; Moutinho, F.; Gomes, L. From IOPT Petri nets to C: An automatic code generator tool. In Proceedings of the 2011 9th IEEE International Conference on Industrial Informatics, Lisbon, Portugal, 26–29 July 2011; pp. 390–395. [Google Scholar] [CrossRef]
- Pereira, F.; Melo, A.; Gomes, L. Remote operation of embedded controllers designed using IOPT Petri-nets. In Proceedings of the 2015 IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015; pp. 572–579. [Google Scholar] [CrossRef]
- Pereira, F.; Gomes, L. A JSON/HTTP communication protocol to support the development of distributed cyber-physical systems. In Proceedings of the 2018 IEEE 16th International Conference on Industrial Informatics (INDIN), Porto, Portugal, 18–20 July 2018; pp. 23–30. [Google Scholar] [CrossRef]
- Girault, C.; Valk, R. Petri Nets for Systems Engineering: A Guide to Modeling, Verification, and Applications; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Reisig, W. Understanding Petri Nets: Modeling Techniques, Analysis Methods, Case Studies; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Hanisch, H.M.; Lüder, A. A signal extension for Petri nets and its use in controller design. Fundam. Inform. 2000, 41, 415–431. [Google Scholar] [CrossRef]
- Reisig, W. A Primer in Petri Net Design; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Khaddar, M.A.E.; Boulmalf, M. Smartphone: The Ultimate IoT and IoE Device. In Smartphones from an Applied Research Perspective; Mohamudally, N., Ed.; IntechOpen: Rijeka, Croatia, 2017; Chapter 7. [Google Scholar] [CrossRef] [Green Version]
- Spachos, P.; Plataniotis, K. BLE Beacons in the Smart City: Applications, Challenges, and Research Opportunities. IEEE Internet Things Mag. 2020, 3, 14–18. [Google Scholar] [CrossRef]
- Harriehausen-Mühlbauer, B.; Roth, J. WheelScout—Barrier-Free Navigation. In Proceedings of SAI Intelligent Systems Conference (IntelliSys) 2016; Springer: Cham, Switzerland, 2018; pp. 1056–1063. [Google Scholar] [CrossRef]
- Bassoli, M.; Bianchi, V.; Munari, I.D. A Plug and Play IoT Wi-Fi Smart Home System for Human Monitoring. Electronics 2018, 7, 200. [Google Scholar] [CrossRef] [Green Version]
- Hlaing, W.; Thepphaeng, S.; Nontaboot, V.; Tangsunantham, N.; Sangsuwan, T.; Pira, C. Implementation of WiFi-based single phase smart meter for Internet of Things (IoT). In Proceedings of the 2017 International Electrical Engineering Congress (iEECON), Pattaya, Thailand, 8–10 March 2017; pp. 1–4. [Google Scholar]
- Walia, N.K.; Kalra, P.; Mehrotra, D. An IOT by information retrieval approach: Smart lights controlled using WiFi. In Proceedings of the 2016 6th International Conference—Cloud System and Big Data Engineering (Confluence), Noida, India, 14–15 January 2016; pp. 708–712. [Google Scholar]
- Shi, C.; Liu, J.; Liu, H.; Chen, Y. Smart User Authentication through Actuation of Daily Activities Leveraging WiFi-Enabled IoT. In Proceedings of the 18th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Mobihoc’17, Chennai, India, 10–14 July 2017; Association for Computing Machinery: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Suryotrisongko, H.; Kusuma, R.C.; Ginardi, R.H. Four-Hospitality: Friendly Smart City Design for Disability. Procedia Comput. Sci. 2017, 124, 615–623. [Google Scholar] [CrossRef]
- Mobasheri, A.; Deister, J.; Dieterich, H. Wheelmap: The wheelchair accessibility crowdsourcing platform. Open Geospat. Data Softw. Stand. 2017, 2, 1–15. [Google Scholar] [CrossRef]
- Menkens, C.; Sussmann, J.; Al-Ali, M.; Breitsameter, E.; Frtunik, J.; Nendel, T.; Schneiderbauer, T. EasyWheel—A Mobile Social Navigation and Support System for Wheelchair Users. In Proceedings of the 2011 Eighth International Conference on Information Technology: New Generations, Las Vegas, NV, USA, 1–13 April 2011; pp. 859–866. [Google Scholar]
- Mirri, S.; Prandi, C.; Salomoni, P. Personalizing Pedestrian Accessible way-finding with mPASS. In Proceedings of the 2016 13th IEEE Annual Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2016; pp. 1119–1124. [Google Scholar]
- Edinger, J.; Hofmann, A.; Wachner, A.; Becker, C.; Raychoudhury, V.; Krupitzer, C. WheelShare: Crowd-Sensed Surface Classification for Accessible Routing. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 584–589. [Google Scholar]
- Mourcou, Q.; Fleury, A.; Dupuy, P.; Diot, B.; Franco, C.; Vuillerme, N. Wegoto: A Smartphone-based approach to assess and improve accessibility for wheelchair users. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 1194–1197. [Google Scholar]
- Civitarese, G.; Mascetti, S.; Butifar, A.; Bettini, C. Automatic Detection of Urban Features from Wheelchair Users’ Movements. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications (PerCom), Kyoto, Japan, 11–17 March 2019; pp. 1–10. [Google Scholar]
- Mascetti, S.; Civitarese, G.; El Malak, O.; Bettin, C. SmartWheels: Detecting urban features for wheelchair users’ navigation. Pervasive Mob. Comput. 2020, 62, 101115. [Google Scholar] [CrossRef] [Green Version]
- Dias, J.; Rodrigues, J.; Soares, V.; Caldeira, J.; Korotaev, V.; Proenca, M., Jr. Network Management and Monitoring Solutions for Vehicular Networks: A Survey. Electronics 2020, 9, 853. [Google Scholar] [CrossRef]
- Botte, M.; Pariota, L.; D’Acierno, L.; Bifulco, G.N. An Overview of Cooperative Driving in the European Union: Policies and Practices. Electronics 2019, 8, 616. [Google Scholar] [CrossRef] [Green Version]
- Zambrano-Martinez, J.; Calafate, C.; Soler, D.; Lemus, L.; Cano, J.C.; Manzoni, P.; Gayraud, T. A Centralized Route-Management Solution for Autonomous Vehicles in Urban Areas. Electronics 2019, 8, 722. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; He, X.; Huang, Z.; Ji, Y. Transmission Capacity Characterization in VANETs with Enhanced Distributed Channel Access. Electronics 2019, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- EUROPA—Cooperative Vehicle-Infrastructure Systems|TRIMIS—European Commission. 2015. Available online: https://trimis.ec.europa.eu/project/cooperative-vehicle-infrastructure-systems (accessed on 26 May 2020).
- EUROPA—Co-Operative Networks for Intelligent Road Safety|TRIMIS—European Commission. 2013. Available online: https://trimis.ec.europa.eu/project/co-operative-networks-intelligent-road-safety (accessed on 26 May 2020).
- EUROPA—Cooperative Systems for Road Safety|TRIMIS—European Commission. 2015. Available online: https://trimis.ec.europa.eu/project/cooperative-systems-road-safety (accessed on 26 May 2020).
- Toulminet, G.; Boussuge, J.; Laurgeau, C. Comparative synthesis of the 3 main European projects dealing with Cooperative Systems (CVIS, SAFESPOT and COOPERS) and description of COOPERS Demonstration Site 4. In Proceedings of the 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 809–814. [Google Scholar]
- ISO/TC 204—Intelligent Transport Systems. 2017. Available online: https://www.iso.org/committee/54706.html (accessed on 26 May 2020).
- Erskine, S.K.; Elleithy, K.M. Real-Time Detection of DoS Attacks in IEEE 802.11p Using Fog Computing for a Secure Intelligent Vehicular Network. Electronics 2019, 8, 776. [Google Scholar] [CrossRef] [Green Version]
- Ding, F.; Ma, Z.; Li, Z.; Su, R.; Zhang, D.; Zhu, H. A Terminal-Oriented Distributed Traffic Flow Splitting Strategy for Multi-Service of V2X Networks. Electronics 2019, 8, 644. [Google Scholar] [CrossRef] [Green Version]
- Du, D.; Xin, J.; Wu, X.; Tan, Y.; Zeng, X.; Huang, S.; Li, Y. 3D Spatial Characteristics of C-V2X Communication Interference. Electronics 2019, 8, 718. [Google Scholar] [CrossRef] [Green Version]
- Intelligent Transport Systems (ITS). ITS-G5 Access Layer Specification for Intelligent Transport Systems Operating in the 5 GHz Frequency Band; European Telecommunications Standards Institute: Sophia Antipolis, France, 2020; Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/302663/01.02.00_20/en_302663v010200a.pdf (accessed on 26 May 2020).
- Fernández-Isabel, A.; Fuentes-Fernández, R. Analysis of Intelligent Transportation Systems Using Model-Driven Simulations. Sensors 2015, 15, 14116–14141. [Google Scholar] [CrossRef] [Green Version]
- Flammini, F.; Marrone, S.; Mazzocca, N.; Nardone, R.; Vittorini, V. Model-Driven V&V Processes for Computer Based Control Systems: A Unifying Perspective. In Leveraging Applications of Formal Methods, Verification and Validation. Applications and Case Studies; Margaria, T., Steffen, B., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 190–204. [Google Scholar]
- Scippacercola, F.; Pietrantuono, R.; Russo, S.; Zentai, A. Model-driven engineering of a railway interlocking system. In Proceedings of the 2015 3rd International Conference on Model-Driven Engineering and Software Development (MODELSWARD), Angers, France, 9–11 February 2015; pp. 509–519. [Google Scholar]
- Esp-01 WIFI Module. 2015. Available online: https://ecksteinimg.de/Datasheet/Ai-thinker%20ESP-01%20EN.pdf (accessed on 26 May 2020).
- Raspberry Pi. 2019. Available online: https://www.raspberrypi.org/ (accessed on 26 May 2020).
- Welcome to ESP8266 Arduino Core’s Documentation! 2017. Available online: https://arduino-esp8266.readthedocs.io/en/latest/ (accessed on 26 May 2020).
- Wiki-batman-adv-Open Mesh. 2018. Available online: https://www.open-mesh.org/projects/batman-adv/wiki/Wiki (accessed on 26 May 2020).
- The Python Standard Library. 2018. Available online: https://docs.python.org/3/library/index.html (accessed on 26 May 2020).
- Banerji, S.; SinghaChowdhury, R. Wi-Fi & Wi-MAX: A Comparative Study. Indian J. Eng. 2013, 2, 1–5. [Google Scholar]
- Pereira, F.; Gomes, L. The IOPT-Flow framework pairing Petri nets and data-flows for embedded controller development. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 4832–4837. [Google Scholar] [CrossRef]


















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moutinho, F.; Campos-Rebelo, R.; Lagartinho-Oliveira, C.; Moreira, E.; Almeida, B.; Gomes, L. NOVA Mobility Assistive System: Developed and Remotely Controlled with IOPT-Tools. Electronics 2020, 9, 1328. https://doi.org/10.3390/electronics9081328
Moutinho F, Campos-Rebelo R, Lagartinho-Oliveira C, Moreira E, Almeida B, Gomes L. NOVA Mobility Assistive System: Developed and Remotely Controlled with IOPT-Tools. Electronics. 2020; 9(8):1328. https://doi.org/10.3390/electronics9081328
Chicago/Turabian StyleMoutinho, Filipe, Rogerio Campos-Rebelo, Carolina Lagartinho-Oliveira, Edna Moreira, Bruno Almeida, and Luis Gomes. 2020. "NOVA Mobility Assistive System: Developed and Remotely Controlled with IOPT-Tools" Electronics 9, no. 8: 1328. https://doi.org/10.3390/electronics9081328