
Electromyogram (EMG) Signal Classification Based on Light-Weight Neural Network with FPGAs for Wearable Application


Abstract
:1. Introduction
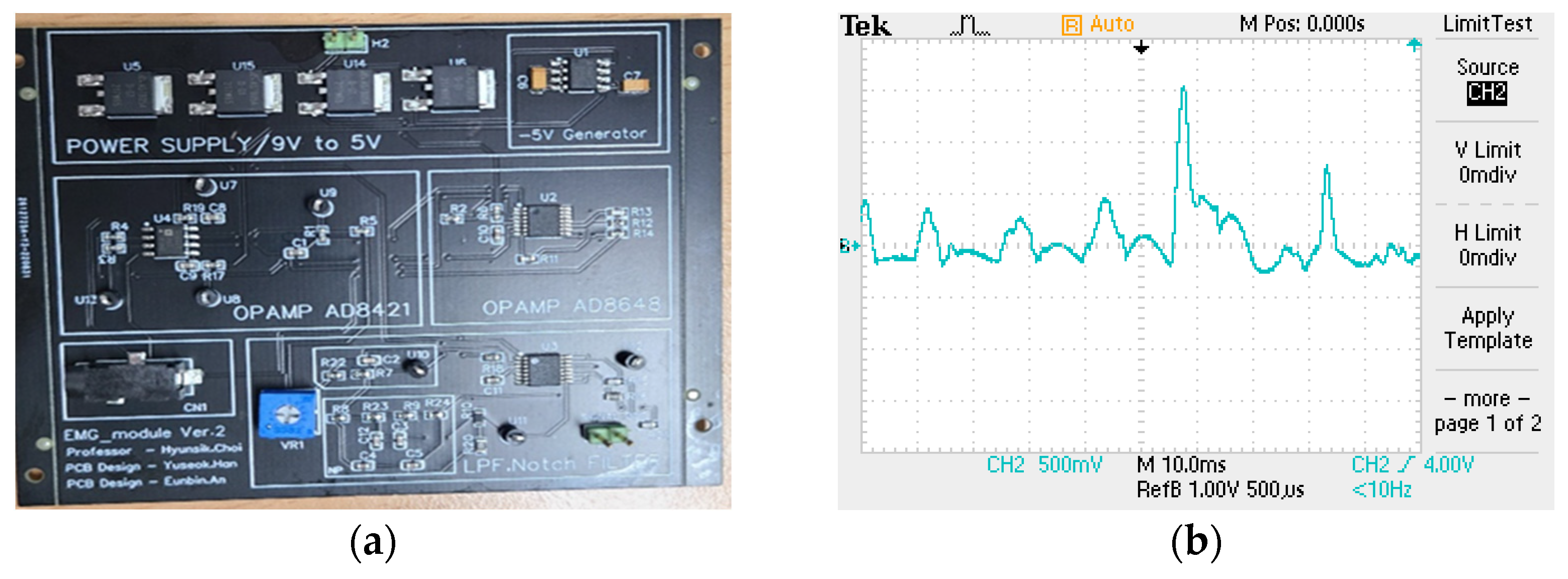
2. Signal Processing
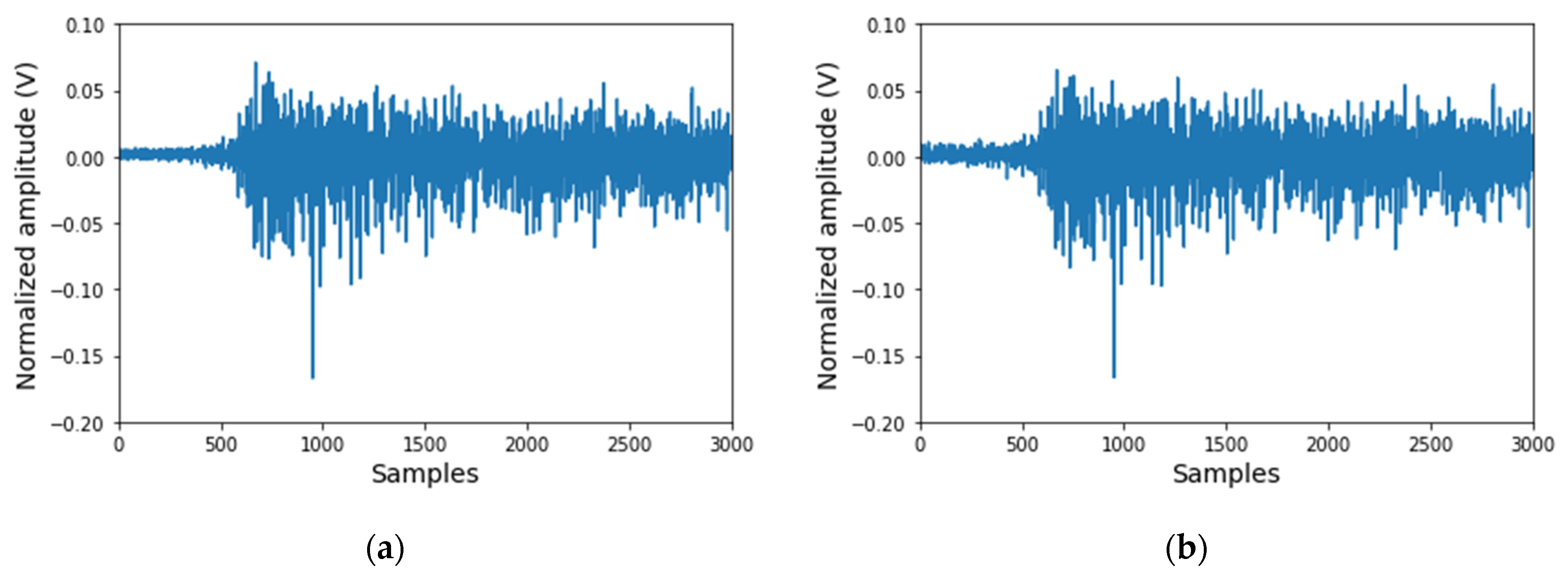
2.1. Data Augmentaion
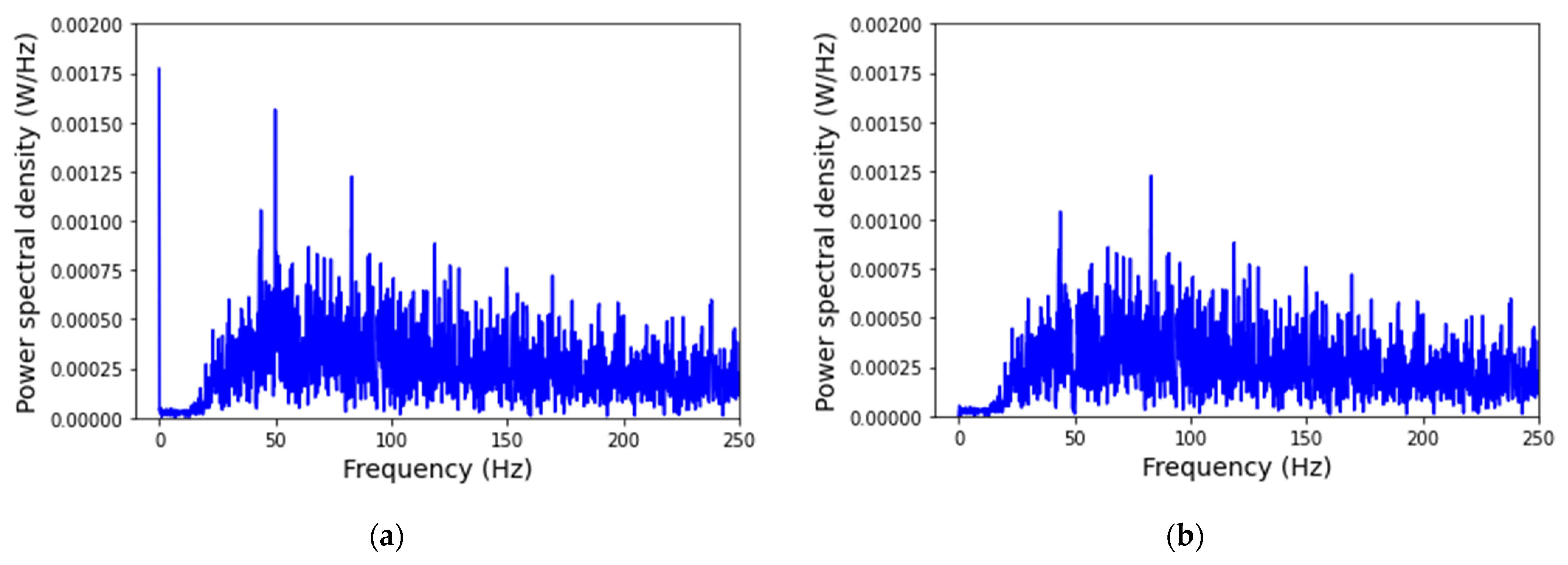
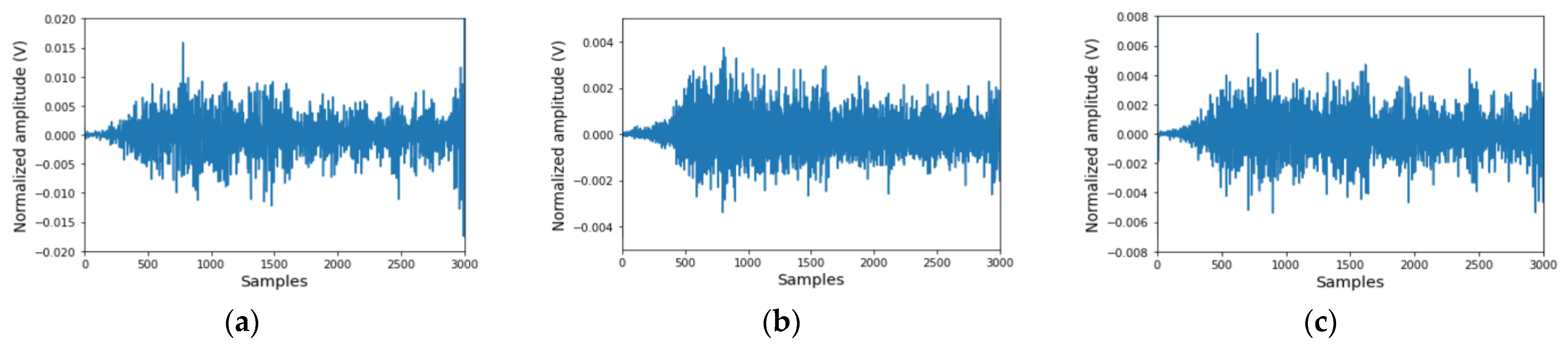
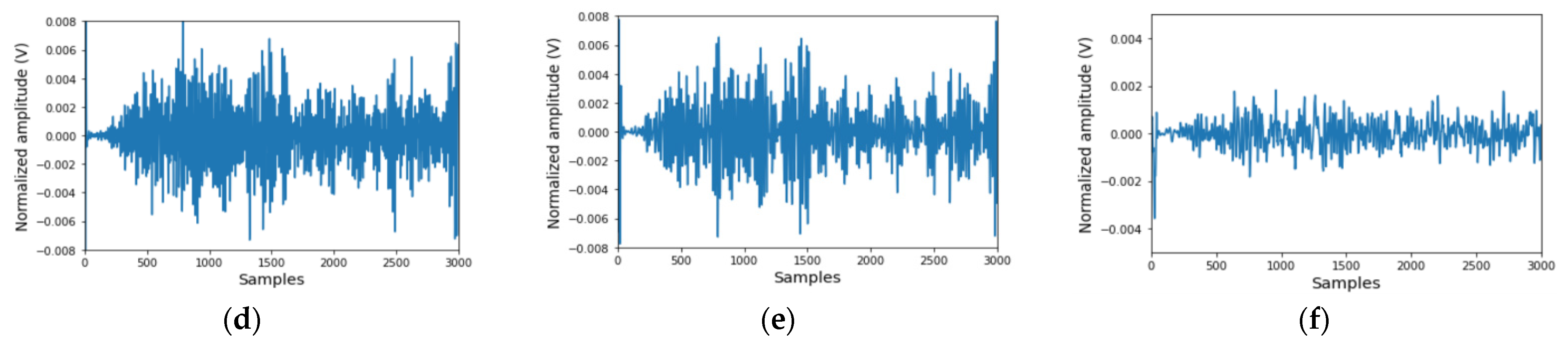
2.2. Filtering and Smoothing
2.3. Feature Extraction
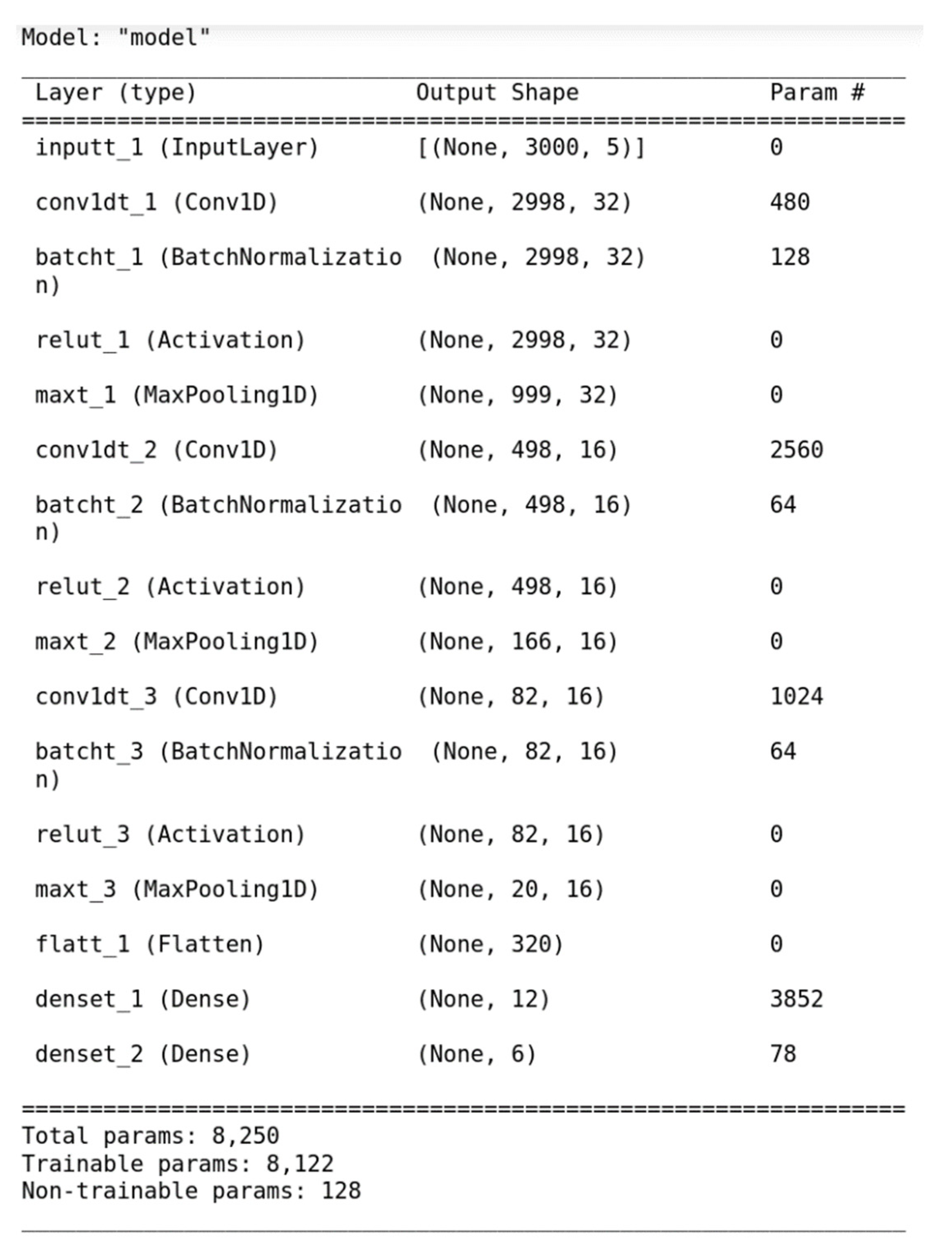
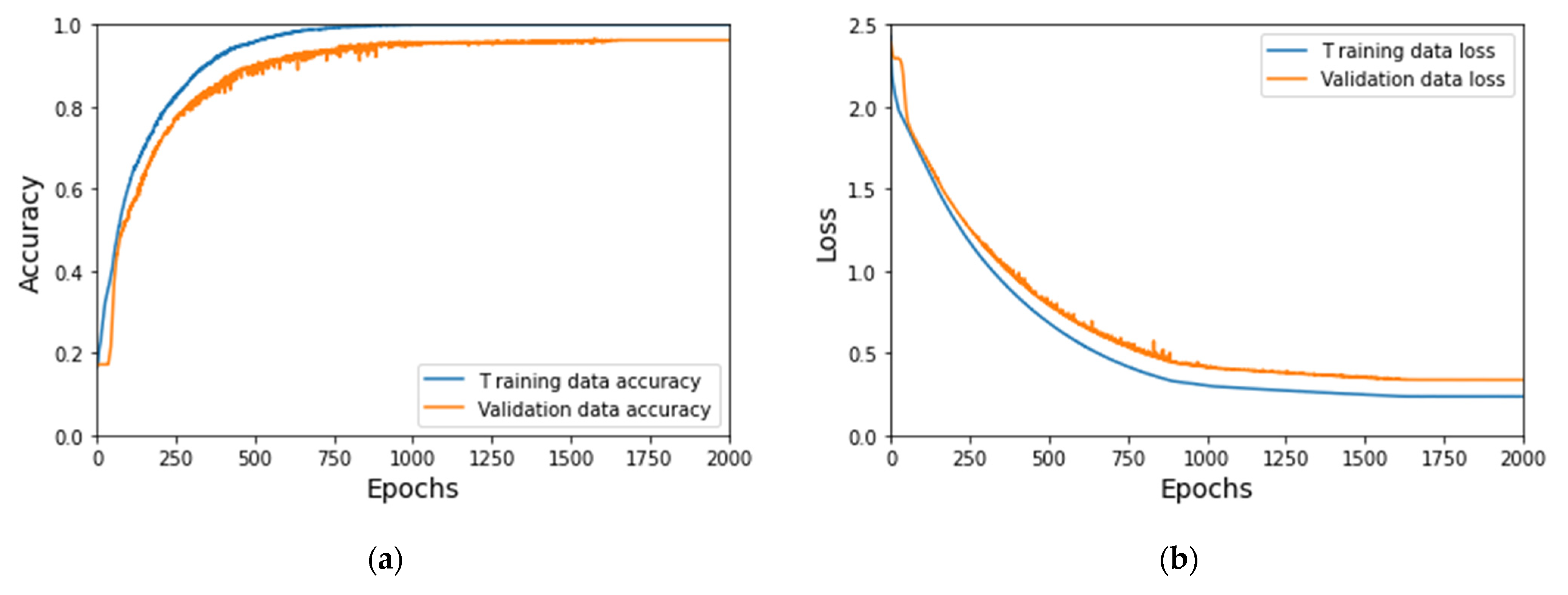
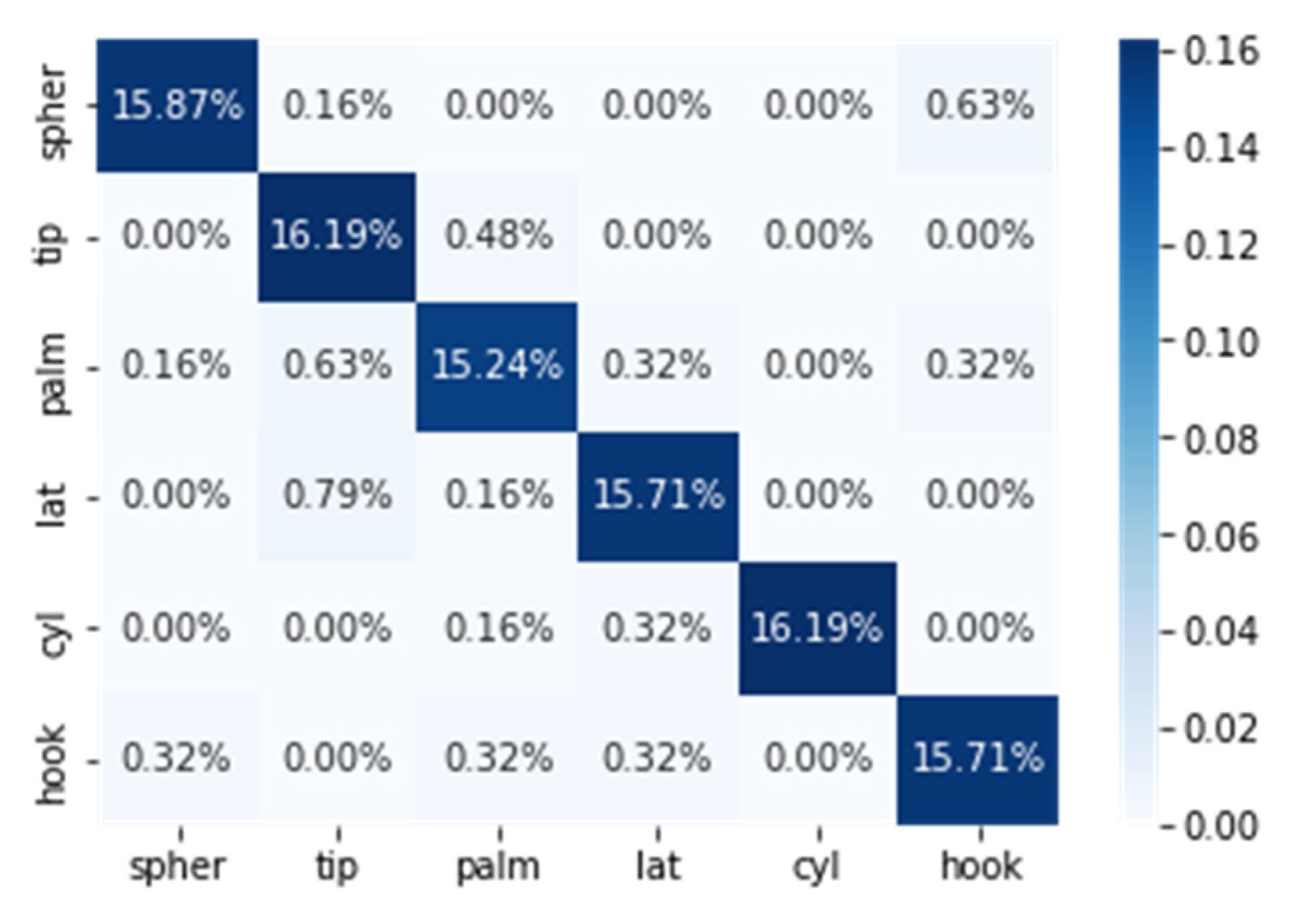
3. Artificial Intelligence Network
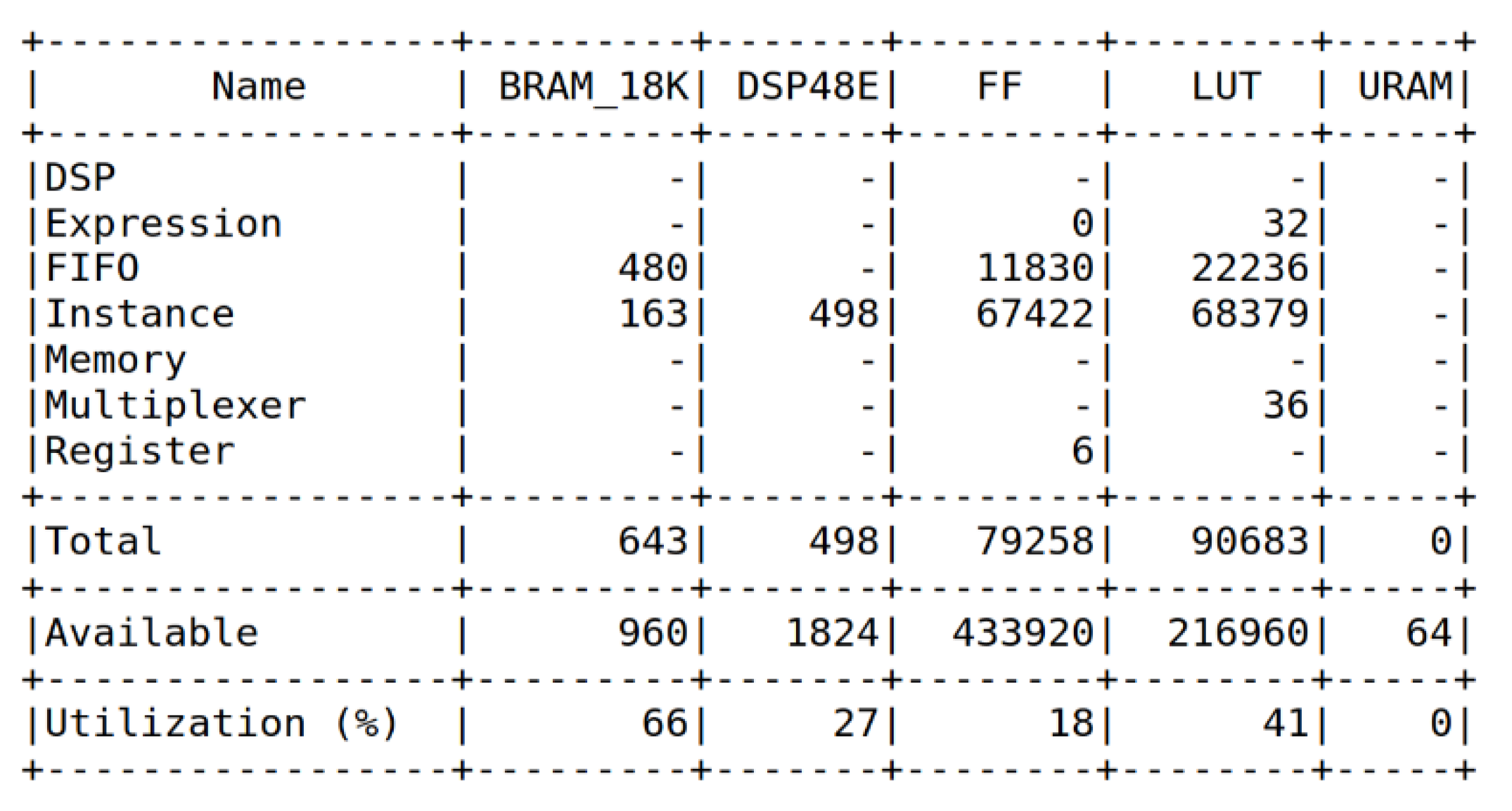
4. Hardware Deployment
5. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Swapna, M.; Viswanadhula, U.M.; Aluvalu, R.; Vardharajan, V.; Kotecha, K. Bio-Signals in Medical Applications and Challenges Using Artificial Intelligence. J. Sens. Actuator Netw. 2022, 11, 17. [Google Scholar] [CrossRef]
- Hammad, M.; Pławiak, P.; Wang, K.; Acharya, U.R. ResNet-Attention model for human authentication using ECG signals. Expert Syst. 2021, 38, e12547. [Google Scholar] [CrossRef]
- Choi, E.J.; Kim, D.K. Arousal and Valence Classification Model Based on Long Short-Term Memory and DEAP Data for Mental Healthcare Management. Healthc. Inform. Res. 2018, 24, 309–316. [Google Scholar] [CrossRef]
- Shahid, H.; Butt, A.; Aziz, S.; Khan, M.U.; Naqvi, S.Z.H. Emotion Recognition System featuring a fusion of Electrocardiogram and Photoplethysmogram Features. In Proceedings of the 14th International Conference on Open Source Systems and Technologies, Lahore, Pakistan, 16–17 December 2020; pp. 1–6. [Google Scholar]
- Yu, J.; Park, S.; Kwon, S.H.; Cho, K.H.; Lee, H. AI-Based Stroke Disease Prediction System Using ECG and PPG Bio-Signals. IEEE Access 2022, 10, 43623–43638. [Google Scholar] [CrossRef]
- Muhammad, G.; Alshehri, F.; Karray, F.; El Saddik, A.; Alsulaiman, M.; Falk, T.H. A comprehensive survey on multimodal medical signals fusion for smart healthcare systems. Inf. Fusion 2021, 76, 355–375. [Google Scholar] [CrossRef]
- Raurale, S.A.; McAllister, J.; Del Rincon, J.M. EMG biometric systems based on different wrist-hand movements. IEEE Access 2021, 9, 12256–12266. [Google Scholar] [CrossRef]
- Rahim, M.A.; Shin, J. Hand movement activity-based character input system on a virtual keyboard. Electronics 2020, 9, 774. [Google Scholar] [CrossRef]
- Antonelli, M.G.; Beomonte Zobel, P.; Durante, F.; Zeer, M. Modeling-Based EMG Signal (MBES) Classifier for Robotic Remote-Control Purposes. Actuators 2022, 11, 65. [Google Scholar] [CrossRef]
- Mukhopadhyay, A.K.; Samui, S. An experimental study on upper limb position invariant EMG signal classification based on deep neural network. Biomed. Signal Process. Control 2020, 55, 101669. [Google Scholar] [CrossRef]
- Albadawi, Y.; Takruri, M.; Awad, M. A review of recent developments in driver drowsiness detection systems. Sensors 2022, 22, 2069. [Google Scholar] [CrossRef] [PubMed]
- Toro-Ossaba, A.; Jaramillo-Tigreros, J.; Tejada, J.C.; Pena, A.; Lopez-Gonzalez, A.; Castanho, R.A. LSTM Recurrent Neural Network for Hand Gesture Recognition Using EMG Signals. Appl. Sci. 2022, 12, 9700. [Google Scholar] [CrossRef]
- Schluter, C.; Caraguay, W.; Ramos, D.C. Development of a low-cost EMG-data acquisition armband to control an above-elbow prosthesis. J. Phys. Conf. Ser. 2022, 2232, 012019. [Google Scholar] [CrossRef]
- Alsolai, H.; Qureshi, S.; Zeeshan Iqbal, S.M.; Ameer, A.; Cheaha, D.; Henesey, L.E.; Karrila, S. Employing a Long-Short-Term Memory Neural Network to Improve Automatic Sleep Stage Classification of Pharmaco-EEG Profiles. Appl. Sci. 2022, 12, 5248. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, C.; Li, G.; Xu, W.; Kong, J.; Jiang, D.; Chen, D. Intelligent human computer interaction based on non-redundant EMG signal. Alex. Eng. J. 2020, 59, 1149–1157. [Google Scholar] [CrossRef]
- Li, Q.D.P.; Zheng, J. Enhancing the security of pattern unlock with surface EMG-based biometrics. Appl. Sci. 2020, 10, 541. [Google Scholar] [CrossRef] [Green Version]
- Sadikoglu, F.; Kavalcioglu, C.; Dagman, B. Electromyogram (EMG) signal detection, classification of EMG signals and diagnosis of neuropathy muscle disease. Procedia Comput. Sci. 2017, 120, 422–429. [Google Scholar] [CrossRef]
- Ngai, W.K.; Xie, H.; Zou, D.; Chou, K.L. Emotion recognition based on convolutional neural networks and heterogeneous bio-signal data sources. Inf. Fusion 2022, 77, 107–117. [Google Scholar] [CrossRef]
- Saikia, A.; Mazumdar, S.; Sahai, N.; Paul, S.; Bhatia, D. Performance analysis of artificial neural network for hand movement detection from EMG signals. IETE J. Res. 2022, 68, 1074–1083. [Google Scholar] [CrossRef]
- Usman, M.; Amin, R.; Aldabbas, H.; Alouffi, B. Lightweight challenge-response authentication in SDN-based UAVs using elliptic curve cryptography. Electronics 2022, 11, 1026. [Google Scholar] [CrossRef]
- Shumba, A.T.; Montanaro, T.; Sergi, I.; Fachechi, L.; De Vittorio, M.; Patrono, L. Leveraging IoT-Aware Technologies and AI Techniques for Real-Time Critical Healthcare Applications. Sensors 2022, 22, 7675. [Google Scholar] [CrossRef]
- Zhu, G.; Liu, D.; Du, Y.; You, C.; Zhang, J.; Huang, K. Toward an intelligent edge: Wireless communication meets machine learning. IEEE Commun. Mag. 2020, 58, 19–25. [Google Scholar] [CrossRef] [Green Version]
- Yazici, M.T.; Basurra, S.; Gaber, M.M. Edge machine learning: Enabling smart internet of things applications. Big Data Cogn. Comput. 2018, 2, 26. [Google Scholar] [CrossRef] [Green Version]
- Sudharsan, B.; Breslin, J.G.; Ali, M.I. Edge2train: A framework to train machine learning models (SVMs) on resource-constrained IoT edge devices. In Proceedings of the 10th International Conference on the Internet of Things, Malmö, Sweden, 6–9 October 2020; pp. 1–8. [Google Scholar]
- Akopyan, F.; Sawada, J.; Cassidy, A.; Alvarez-Icaza, R.; Arthur, J.; Merolla, P.; Modha, D.S. TrueNorth: Design and tool flow of a 65 mW 1 million neuron programmable neurosynaptic chip. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2015, 34, 1537–1557. [Google Scholar] [CrossRef]
- Sambas, A.; Vaidyanathan, S.; Zhang, X.; Koyuncu, I.; Bonny, T.; Tuna, M.; Alcin, M.; Zhang, S.; Sulaiman, I.M.; Awwal, A.M.; et al. A Novel 3D Chaotic System With Line Equilibrium: Multistability, Integral Sliding Mode Control, Electronic Circuit, FPGA Implementation and Its Image Encryption. IEEE Access 2022, 10, 68057–68074. [Google Scholar] [CrossRef]
- Sambas, A.; Vaidyanathan, S.; Bonny, T.; Zhang, S.; Hidayat, Y.; Gundara, G.; Mamat, M. Mathematical model and FPGA realization of a multi-stable chaotic dynamical system with a closed butterfly-like curve of equilibrium points. Appl. Sci. 2021, 11, 788. [Google Scholar] [CrossRef]
- Sambas, A.; Vaidyanathan, S.; Tlelo-Cuautle, E.; Abd-El-Atty, B.; Abd El-Latif, A.A.; Guillen-Fernandez, O.; Sukono; Hidayat, Y.; Gundara, G. A 3-D multi-stable system with a peanut-shaped equilibrium curve: Circuit design, FPGA realization, and an application to image encryption. IEEE Access 2020, 8, 137116–137132. [Google Scholar] [CrossRef]
- Liu, X.; Yang, J.; Zou, C.; Chen, Q.; Yan, X.; Chen, Y.; Cai, C. Collaborative edge computing with FPGA-based CNN accelerators for energy-efficient and time-aware face tracking system. IEEE Trans. Comput. Soc. Syst. 2021, 9, 252–266. [Google Scholar] [CrossRef]
- Guo, K.; Zeng, S.; Yu, J.; Wang, Y.; Yang, H. A survey of FPGA-based neural network accelerator. ACM Trans. Reconfigurable Technol. Syst. 2019, 12, 1–26. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 January 2018; pp. 4510–4520. [Google Scholar]
- Norrie, T.; Patil, N.; Yoon, D.H.; Kurian, G.; Li, S.; Laudon, J.; Young, C.; Jouppi, N.; Patterson, D. The design process for Google’s training chips: TPUv2 and TPUv3. IEEE Micro 2021, 41, 56–63. [Google Scholar] [CrossRef]
- Han, S.; Mao, H.; Dally, W.J. Deep compression: Compressing deep neural networks with pruning, trained quantization and huffman coding. In Proceedings of the International Conference on Learning Representations, San Juan, Puerto Rico, 2–4 May 2016; pp. 1–14. [Google Scholar]
- Sapsanis, C.; Georgoulas, G.; Tzes, A.; Lymberopoulos, D. Improving EMG based classification of basic hand movements using EMD. In Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society 13 (EMBC 13), Osaka, Japan, 3–7 July 2013; pp. 5754–5757. [Google Scholar]
- Lobov, S.; Krilova, N.; Kastalskiy, I.; Kazantsev, V.; Makarov, V.A. Latent factors limiting the performance of sEMG-interfaces. Sensors 2018, 18, 1122. [Google Scholar] [CrossRef] [Green Version]
- Tsinganos, P.; Cornelis, B.; Cornelis, J.; Jansen, B.; Skodras, A. Data augmentation of surface electromyography for hand gesture recognition. Sensors 2020, 20, 4892. [Google Scholar] [CrossRef]
- Jeong, J.W.; Lee, W.; Kim, Y.J. A Real-Time Wearable Physiological Monitoring System for Home-Based Healthcare Applications. Sensors 2021, 22, 104. [Google Scholar] [CrossRef]
- Chen, Y.; Xia, R.; Zou, K.; Yang, K. FFTI: Image Inpainting Algorithm via Features Fusion and Two-Steps Inpainting. J. Vis. Commun. Image Represent. 2023, 1, 103776. [Google Scholar] [CrossRef]
- Byeon, Y.H.; Pan, S.B.; Kwak, K.C. Intelligent deep models based on scalograms of electrocardiogram signals for biometrics. Sensors 2019, 19, 935. [Google Scholar] [CrossRef] [Green Version]
- Adib, A.; Zaerpour, A.; Lotfirad, M. On the reliability of a novel MODWT-based hybrid ARIMA-artificial intelligence approach to forecast daily snow depth (Case study: The western part of the Rocky Mountains in the USA). Cold Reg. Sci. Technol. 2021, 189, 103342. [Google Scholar] [CrossRef]
- Zhdanov, D.S.; Zemlyakov, I.Y.; Kosteley, Y.V.; Bureev, A.S. Choice of Wavelet Filtering Parameters for Processing Fetal Phonocardiograms with High Noise Level. Biomed. Eng. 2021, 55, 194–199. [Google Scholar] [CrossRef]
- Fast Machine Learning Lab. Available online: https://github.com/fastmachinelearning/ (accessed on 1 February 2022).
- Kang, S.; Kim, H.; Park, C.; Sim, Y.; Lee, S.; Jung, Y. sEMG-Based Hand Gesture Recognition Using Binarized Neural Network. Sensors 2023, 23, 1436. [Google Scholar] [CrossRef]
- Westby, I.; Yang, X.; Liu, T.; Xu, H. FPGA acceleration on a multi-layer perceptron neural network for digit recognition. J. Supercomput. 2021, 77, 14356–14373. [Google Scholar] [CrossRef]
- Xia, M.; Huang, Z.; Tian, L.; Wang, H.; Chang, V.; Zhu, Y.; Feng, S. SparkNoC: An energy-efficiency FPGA-based accelerator using optimized lightweight CNN for edge computing. J. Syst. Archit. 2021, 115, 101991. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, K.; Qian, J.; Zhang, L. Real-time surface EMG pattern recognition for hand gestures based on an artificial neural network. Sensors 2019, 19, 3170. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Sacks, J.; Zhang, M.; Richardson, A.G.; Lucas, T.H.; Van der Spiegel, J. The virtual trackpad: An electromyography-based, wireless, real-time, low-power, embedded hand-gesture-recognition system using an event-driven artificial neural network. IEEE Trans. Circuits Syst. II Express Briefs 2016, 64, 1257–1261. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Accuracy | Inference Time (4000 Samples) |
|---|---|---|
| CPU | 95% | 2.47 s |
| FPGA, ap_fixed<24, 6> | 95% | 520 ms |
| FPGA, ap_fixed<22, 6> | 94% | 480 ms |
| FPGA, ap_fixed<20, 6> | 86% | 435 ms |
| FPGA, ap_fixed<16, 6> | 18% | 378 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, H.-S. Electromyogram (EMG) Signal Classification Based on Light-Weight Neural Network with FPGAs for Wearable Application. Electronics 2023, 12, 1398. https://doi.org/10.3390/electronics12061398
Choi H-S. Electromyogram (EMG) Signal Classification Based on Light-Weight Neural Network with FPGAs for Wearable Application. Electronics. 2023; 12(6):1398. https://doi.org/10.3390/electronics12061398
Chicago/Turabian StyleChoi, Hyun-Sik. 2023. "Electromyogram (EMG) Signal Classification Based on Light-Weight Neural Network with FPGAs for Wearable Application" Electronics 12, no. 6: 1398. https://doi.org/10.3390/electronics12061398